水下小目標合成孔徑聲吶層析成像技術研究
2023-09-14 01:00:18陳敬軍曾賽
聲學技術 2023年4期
關鍵詞:信號
陳敬軍,曾賽
(1.海軍裝備部駐上海地區第七軍事代表室,上海 201108;2.上海船舶電子設備研究所,上海 201108)
0 引 言
水雷是現代海戰中艦艇面臨的主要水下威脅之一,主要包括錨雷、沉底雷、掩埋雷等類型。提高對水雷的探測識別能力一直是淺海或淺水環境下艦艇反水雷作戰的重要需求之一。由于水介質對于電磁信號的吸收較強,使得聲信號成為水雷目標探測的首選手段。目前,水雷探測識別依然面臨許多挑戰,存在許多技術難點。一方面,水雷具有目標尺度小、目標強度弱、目標散射聲場空間指向不均勻性等特性,遠距離小目標檢測困難,需要解決在遠距離上提高目標檢測概率的問題。另一方面,水雷所處的水下環境干擾小目標多,即使同一目標從不同方位觀測時得到的結果也可能差異較大,水雷容易與自然目標或民用目標混淆,提高水雷識別性能需要解決可疑威脅小目標的識別確認問題。
提供更加精確的目標回波圖像是顯著提高圖像探測聲吶識別性能的重要手段。圖像聲吶的分辨率是衡量圖像聲吶性能優劣的重要技術指標,一般分為距離分辨率和方位分辨率。距離分辨率是指聲波傳播方向的分辨率,方位分辨率是指垂直于聲傳播方向的分辨率。距離分辨率由信號的脈沖寬度或者帶寬決定,可以通過增加信號的帶寬來提高距離分辨率。方位分辨率與聲吶基陣的大小有關,在實際工程應用中,利用增加基陣的大小來提高方位分辨率的方法受到了成本、安裝空間等現實條件的制約。采用合成孔徑的方法是提高聲吶方位分辨率的一種可行方案,并已經在工程應用中得到檢驗。與單波束聲吶、多波束聲吶和側掃聲吶相比,合成孔徑聲吶在水下目標探測成像和識別方面具有顯著的優勢[1]。
根據成像的原理,可以將合成孔徑聲吶分為條帶合成孔徑聲吶和干涉合成孔徑聲吶,其中干涉合成聲吶比條帶合成孔徑聲吶多一條接收陣,其結構更為復雜。與多波束聲吶和側掃聲吶類似,無論是條帶合成孔徑聲吶還是干涉合成孔徑聲吶,其運動軌跡均為直線,對于水中觀測場景中的待觀察目標而言,直線軌跡決定了聲吶波束只能在有限角度內觀測到目標。從目標特性的角度分析,對于各向異性目標,不同方位的散射特性是不同的,有限的觀測角帶來了目標信息缺失的問題[2],最終會影響圖像聲吶的探測識別性能的提高。
層析(Tomography)成像技術是一種波數譜分析方法,其本質是通過圓形測量孔徑獲得關于目標的全方位散射信息,然后基于全方位散射信息反演重建得到目標的外形輪廓(聲學層析)或內部精細結構(醫學層析)[3],層析成像技術已經成功應用于多個領域[4-7]。利用層析手段獲得的目標回波信號波數結構呈現“圓臺”結構。圓臺中空結構的大小與發射信號的帶寬相關,當發射信號帶寬較大時,圓臺中空結構小,波數譜包含的信息量大[8]。“圓臺”形的三維波數譜結構使得層析成像技術可以獲得目標圖像的高度向分辨率,有利于提高目標成像質量,提高目標識別概率[9]。
將合成孔徑體制與層析手段相結合,通過構造觀測場景的全方位觀察態勢,能夠克服各向異性目標不同方位散射特性各異的困難,獲得全方位散射信息,使得成像矩陣的可解性更強。從傅里葉成像的角度而言,層析合成孔徑擴展了波束譜域的有效帶寬,從而能夠達到或者接近圖像理論分辨率的極限,而且具備了三維成像能力[9]。本文研究了水下目標層析成像技術,首先系統分析了現有成像技術手段的技術特征,并與層析合成孔徑技術手段進行了比較。其次,介紹了層析反演的基本原理,進行了層析成像的仿真,并通過水池試驗和湖上試驗驗證了層析成像技術的可行性。
1 層析合成孔徑聲吶系統理論模型
1.1 層析合成孔徑聲吶分辨率模型
本節通過與多波束聲吶、條帶合成孔徑聲吶比較,分析層析合成孔徑聲吶成像分辨率特性。多波束聲吶采用實孔徑成像,慢時間維(方位向)分辨率δx和快時間維(距離向)分辨率δy分別為[10]
式中:Da為聲吶沿方位向的孔徑,λ為發射信號中心頻率對應的波長,R0為徑向距離,c為水中聲速,B為發射信號帶寬。式(1)表明多波束聲吶的快時間維分辨率δy取決于主動發射信號的頻率帶寬,多波束聲吶的慢時間維成像分辨率δx隨著距離的增大而變差。
條帶合成孔經聲吶慢時間維分辨率δx和快時間維分辨率δy分別為
式中:方位向分辨率公式分母中的2倍是由雙程傳播產生的。波束指向角可以近似為θ0≈λ/Da(3 dB 角為0.886λ/Da),條帶合成孔徑的長度為Lsa=R0θ0=R0λ/Da,將合成孔徑長度代入式(2),則有δx=Da/2。這說明條帶合成孔徑聲吶的快時間維分辨率取決于主動發射信號的頻率帶寬,慢時間維分辨率與發射陣物理孔徑相關。若把合成孔徑角代入式(2),則有這說明條帶合成孔徑聲吶慢時間維分辨率由中心頻率波長和視角確定。
層析合成孔徑聲吶的幾何模型如圖1所示。以目標中心為圓心建立直角坐標系,圖1中的O為觀測目標,S為圍繞目標做圓周運動的陣元,當垂直陣做圓周運動時,S陣元形成的觀測平面z=H,Rs為觀測平面的半徑,參考點與S陣元之間的距離為R0。實際聲吶系統需要考慮工作頻率帶寬的影響,現以位于中心點O的點目標為例分析給定帶寬條件下水聲層析成像的分辨率。設主動發射采用寬帶信號,中心頻率為f0、帶寬為B,則點目標的空間頻率波數譜為
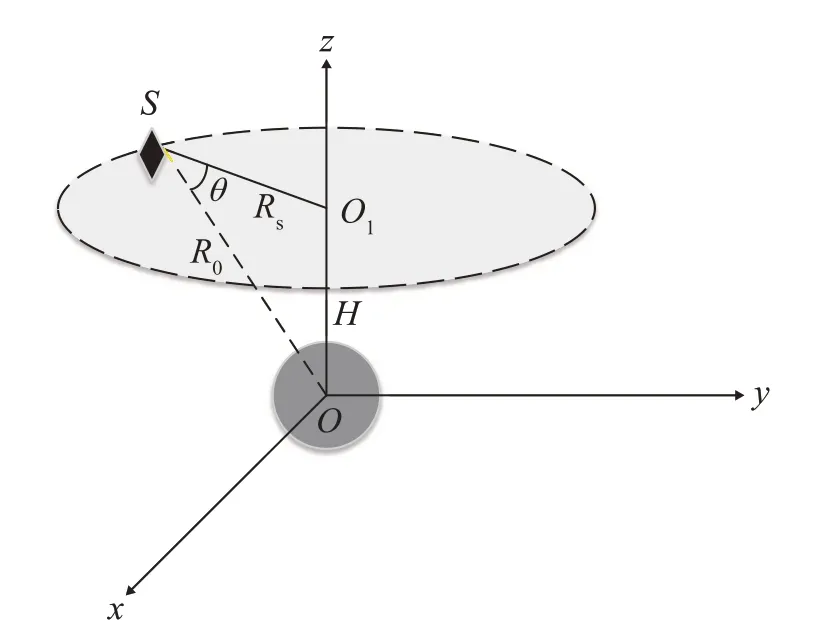
圖1 層析合成孔徑聲吶系統成像幾何模型Fig.1 Imaging geometry model of the tomography-synthetic aperture sonar system
對式(3)所示波數譜進行二維傅里葉變換并引入極坐標變換,即可以得到點目標的成像結果。由此可以得到層析合成孔徑聲吶成像系統點擴散函數:
式(5)為發射信號為寬帶信號時層析合成孔徑聲吶的分辨率表達式。式(5)表明,水聲層析成像系統的慢時間維分辨率與快時間維分辨率基本相當,慢時間維和快時間維分辨率由工作帶寬決定,與距離無關。當發射信號為單頻窄帶時,分辨率為δy=π/(2Kmaxsinβ),其中β為波數圓錐角的一半,Kmax為單頻信號波數。由此可以看出,發射信號為單頻信號時,分辨率由頻率決定,頻率越大分辨率越高。條帶合成孔徑的慢時間維成像分辨率僅取決于聲吶實孔徑長度Da,還不能達到寬帶發射條件下的快時間維成像分辨能力,因此層析合成孔徑聲吶的分辨率優于多波束聲吶和條帶合成孔徑聲吶。
1.2 層析成像理論
層析合成孔徑聲吶成像是通過測量空間目標圖像的波數譜或空間頻率譜(與目標圖像互為傅里葉變換對)數據實現成像的,其理論基礎是空域傅里葉變換[11-15]。圖2 給出了水聲層析成像原理的示意圖。假設被測目標分布在兩維平面內,以被測成像空間區域的中心O為原點建立平面直角坐標系xOy,聲吶圍繞中心O做圓周運動,聲吶到中心O的距離為R0,聲波入射方向與x軸的夾角為θ。

圖2 層析成像原理示意圖Fig.2 Schematic diagram of the tomography imaging principle
當聲吶與被測目標之間的距離和工作頻率波長之間滿足遠場條件時,可以將發射和接收信號用平面波近似。聲吶在θ方位角采集的回波信號可以表述為
式中:q(x,y)為待重建目標外形及其內部結構特征反射系數分布,p0(t)是聲吶主動發射信號,c是水中聲速,s表示相對延遲距離,是散射點矢量r(x,y)沿θ方向的投影距離,計算公式為:s=xcosθ+ysinθ。對pθ(t)做關于時間變量t的一維傅里葉變換,可以得到一維時域回波信號頻率譜:
其中:Q0(ω)為主動發射信號頻率譜,波數定義為k=ω/c。對q(x,y)關于空間變量x和y做二維傅里葉變換,可以得到空間波數譜:
令kx=2kcosθ、ky=2ksinθ,代入式(8),并與式(7)比較,可以得到:
式(9)建立了測量的一維時域回波信號頻率譜與被測目標或被測區域反射系數q(x,y)的二維空間波數譜的數學關系,從而可以獲得全方位角的空間波數譜。對空間波數譜進行二維傅里葉逆變換可以得到被測目標或被測區域反射系數的成像結果,即:
2 仿真試驗
待測目標由40 個亮點組成,這些亮點組成了大小為1 m×1 m 的正方形,待測目標的幾何態勢如圖3 所示。目標反射系數設為1,發射信號為線性調頻信號,中心頻率為100 kHz,帶寬為30 kHz,發射脈寬為10 ms,層析成像的測量半徑為30 m。
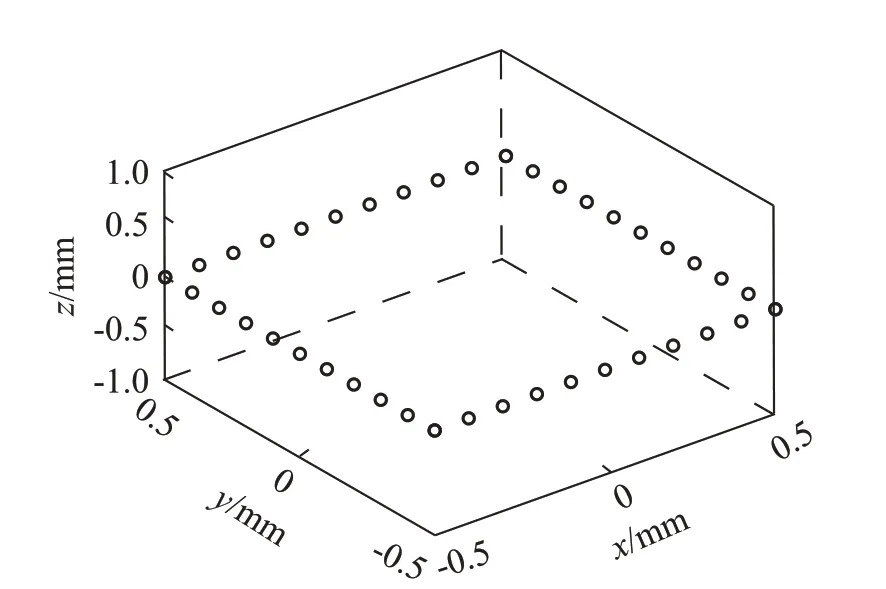
圖3 待成像目標示意圖Fig.3 Diagram of the object to be imaged
圖4為陣元回波信號的角度-時間譜,其中橫軸為角度,縱軸為距離向采樣點。從圖4 中可以看出,層析合成孔徑聲吶獲得的目標回波的時間-角度圖呈現正弦曲線的樣式。圖5 為基于1.2 小節成像理論對平面點目標的重建效果圖。從圖5中的重建效果可以看出,層析合成孔徑聲吶能夠對物體進行精確成像。
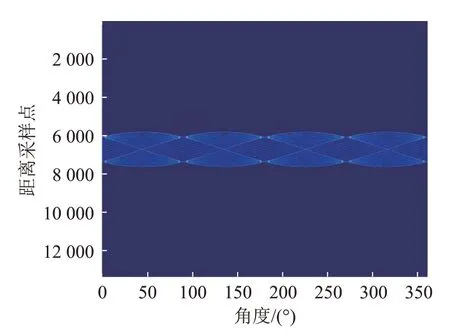
圖4 目標回波角度-時間譜Fig.4 Target echo signal structure
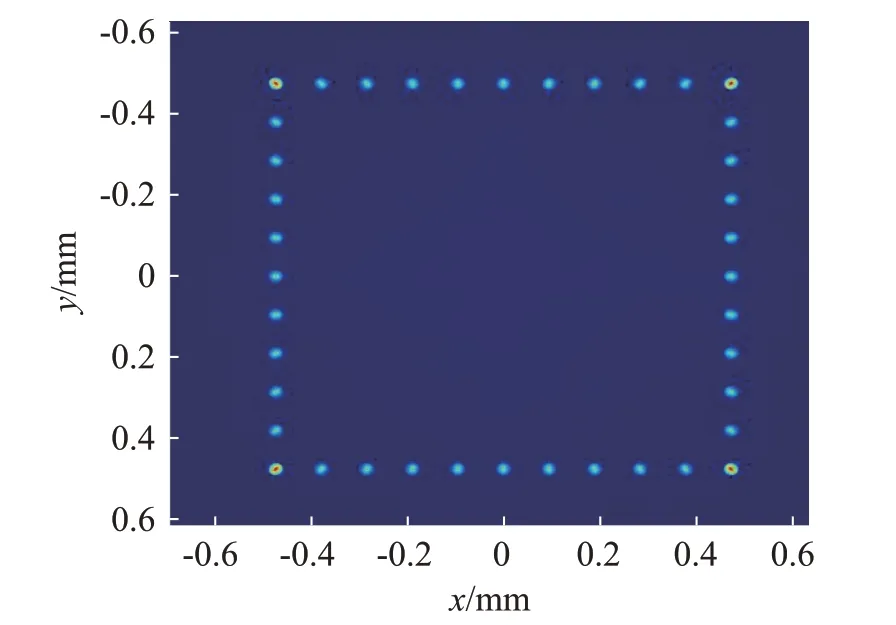
圖5 目標二維成像示意圖Fig.5 A schematic representation of the target in twodimensional imaging
3 試驗驗證
3.1 水池試驗驗證
在某消聲水池進行了層析合成孔徑聲吶成像技術的驗證試驗。試驗測試態勢示意圖如圖6 所示。待測目標為Benckmark潛艇模型,按照1∶20比例縮比制作,高度小于35 cm,長度約為2 m,為雙層加肋結構。試驗用Benckmark目標,如圖7所示。待測目標放置在一個轉臺上進行周向旋轉,發射接收陣在另一個轉臺上,發射陣與目標之間的距離為10 m,發射陣在水下的深度為3 m。發射陣發射160 kHz的單頻信號,接收陣為“L”形。

圖6 消聲水池試驗測試態勢示意圖Fig.6 Test situation diagram in anechoic pool

圖7 試驗用Benchmark目標Fig.7 Benchmark target used for the experiment
試驗中接收陣元回波結構如圖8所示,橫坐標為角度,縱坐標為距離采樣點。從圖8 中可以看出,隨著目標的轉動,目標回波呈現正弦曲線結構。圖9 為待測目標的水聲層析成像結果。從圖9中可以看出縮比模型的上層結構、內部肋板以及外形輪廓結構均得到清晰地重建,與真實的結構吻合較好,驗證了本文所提層析重建方法的有效性。

圖8 Benchmark目標回波角度-時間譜Fig.8 Benchmark target echo structure

圖9 Benchmark目標圖像重建結果Fig.9 Reconstruction result of the Benchmark target image
3.2 湖上試驗驗證
本文對人工布放的目標進行了層析合成孔徑成像的湖上驗證試驗,試驗目標如圖10 所示。試驗區域的水深為12 m。發射陣發射線性調頻信號,中心頻率為100 kHz,帶寬為30 kHz,信號重復周期為150 ms。采用多子陣接收目標回波,其中發射陣和接收陣通過固定機構與運動平臺剛性連接運動。發射接收陣的運動載體為水面雙體船。試驗中,水面雙體船搭載發射接收換能器繞目標做圓周運動,利用GPS定位雙體船的軌跡。

圖10 湖上試驗待測目標Fig.10 The target to be tested in lake
圖11為待測目標回波的角度-時間譜。圖12為利用本文所述方法對試驗目標進行層析成像的結果。從圖12 中可以看出,利用獲得的目標回波信號能夠重建目標的二維外形輪廓,且目標的形狀輪廓無畸變、無陰影,有利于目標的正確識別。

圖11 試驗目標回波角度-時間譜Fig.11 Echo structure of the test target
4 結 論
水下目標或場景的聲成像對于目標的探測與識別具有重要的意義。本文研究了基于層析合成孔徑的水下目標成像方法,理論分析了層析合成孔徑聲吶的分辨率以及層析成像的機制,并通過仿真試驗、水池試驗和湖上試驗驗證了層析合成孔徑聲吶對水下目標的層析成像效果。結果表明,本文所提方法能夠在一定距離上對水下目標圖像進行精確重建,有利于正確識別水下目標。本文所提方法可以顯著提高水下小目標的識別正確率,對于水下目標的探測與識別研究具有重要應用價值,后續將結合具體工程應用繼續深入研究。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06