基于駕駛行為特性的AEB系統控制策略研究
2023-09-18 13:33:28程劍鋒劉云鵬
河南科技大學學報(自然科學版) 2023年6期
杜 峰,程劍鋒,齊 蕾,杜 瓊,劉云鵬,徐 慧
(1.智能車路協同與安全國家地方聯合工程中心, 天津 300222;2.天津市智能交通技術工程中心,天津 300222;3.天津職業技術師范大學 汽車與交通學院,天津 300222)
0 引言
自動緊急制動系統(autonomous emergency braking system,AEB)可有效降低交通事故發生的概率[1],E-NCAP與我國C-NCAP也在逐步優化AEB測試方案,未來AEB系統會逐漸成為汽車的標配[2-5]。
AEB系統能否實現良好的避撞,主要在于AEB系統的控制策略能否根據車輛間實時的相對運動狀態及其運動趨勢做出精準的判斷,并采取預警或制動處理[6-8]。當前的AEB控制策略主要分為基于安全距離模型和基于安全時間模型2種[9-10]。文獻[11]提出了1種通過設置制動緩沖區優化制動減速度曲線的新型安全距離模型,與傳統安全距離模型相比,在乘車舒適性上有所提高,但為單級制動策略,且制動減速度居于最大值的時間較長。文獻[12]設計了1種利用模糊控制直接控制制動主缸壓力的安全距離模型,該控制策略可根據相對車速、距離的實時變化對主缸壓力及時調整。文獻[13]通過對傳統的安全距離模型(Mazda(馬自達)、Honda(本田)等模型)與碰撞時間(time-to-collision,TTC)模型進行對比仿真,得到以對駕駛員正常駕駛的干擾性為評價指標,TTC模型最優的結論。此外,基于TTC模型的AEB控制策略也是目前最常用的AEB系統避撞算法。文獻[14]通過對駕駛員的分類,考慮了不同駕駛員反應時間對TTC的影響,針對TTC閾值進行了修正,但該控制策略中制動減速度波動不夠平順且峰值波動較大,乘車舒適性不足。基于TTC模型的算法比基于安全距離模型的算法更符合駕駛員駕駛行為特性,乘車舒適性和車輛安全性也更高,但如何在不同工況、環境等因素的影響下,選擇合適的預警與制動介入時機以及制動減速仍是目前AEB系統的重要研究內容。
本文在TTC模型的基礎上,針對不同車速下所需的制動時間與制動減速度具有較大差異的問題,將車速分為低速、中速和高速3種狀態,并設計了基于駕駛員在環的模擬駕駛實驗,研究了不同車速下的駕駛員制動行為特性。結合采集的駕駛員數據,確定合適的預警時間閾值、制動觸發時間閾值及其對應的制動減速度,設計了兩級預警和兩級制動控制策略,以提高AEB系統的可靠性和實用性。
1 車輛動力學模型與AEB系統控制策略分析
1.1 車輛動力學模型
CarSim軟件因其內置較為全面的整車數據,且與Matlab/Simulink等平臺具有較好的兼容性接口而被行業內廣泛使用。本文采用CarSim軟件完成主車與前車的整車模型配置,并基于實車參數對CarSim中的車輛模型進行優化,車輛動力學參數如表1所示。搭建仿真所需的場景、道路、傳感器等信息,如圖1所示。

表1 車輛動力學參數
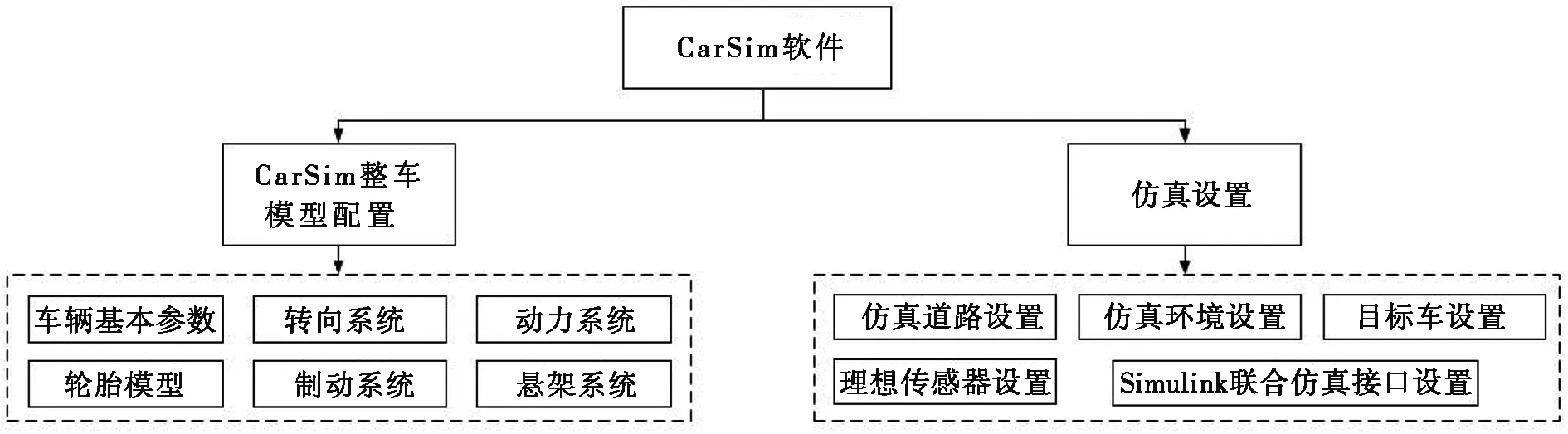
圖1 CarSim 仿真配置
1.2 AEB系統控制策略分析
本文在對AEB系統進行研究時,在確保AEB系統能夠實現良好緊急避撞效果的前提下,考慮到實際交通環境的復雜性,優先將車輛的控制權交由駕駛員。一方面,為了使AEB系統的制動更加符合駕駛員駕駛習慣,不同車速下制動完成后本車與前車需保持大致相同的安全距離,以確保AEB制動介入的時機與期望制動減速度值搭配的合理性。另一方面,從駕駛員角度考慮,兩級FCW預警更有助于提醒駕駛員車輛即將處于危險狀態。若預警后駕駛員仍未做出處理,則先采取較小的一級制動,既可以先降低車速,又可以更為明顯地提醒駕駛員做出主動制動或合適條件下換道等避障措施,只有駕駛員未做任何舉措時,AEB系統才會全部介入并確保車輛的安全性。
具體方法為,在CarSim中設定理想傳感器來獲取自車與前車的相對運動狀態,然后計算得到實時TTC值,再與設定的TTC閾值作對比,從而決策出預警與制動是否觸發。在Matlab/Simulink中建立車輛逆動力學模型,將制動減速度轉化為制動主缸壓力,通過模糊PID控制器實現對制動主缸壓力的精準控制,并將其輸入到CarSim整車模型。由于車輛在緊急制動的過程中可能會出現車輪抱死的情況,結合本次研究的實車參數對CarSim中的ABS模型進行優化,設置車輛速度在高于3km/h時默認開啟ABS,并將滑移率控制在15%~20%。AEB系統工作流程如圖2所示。
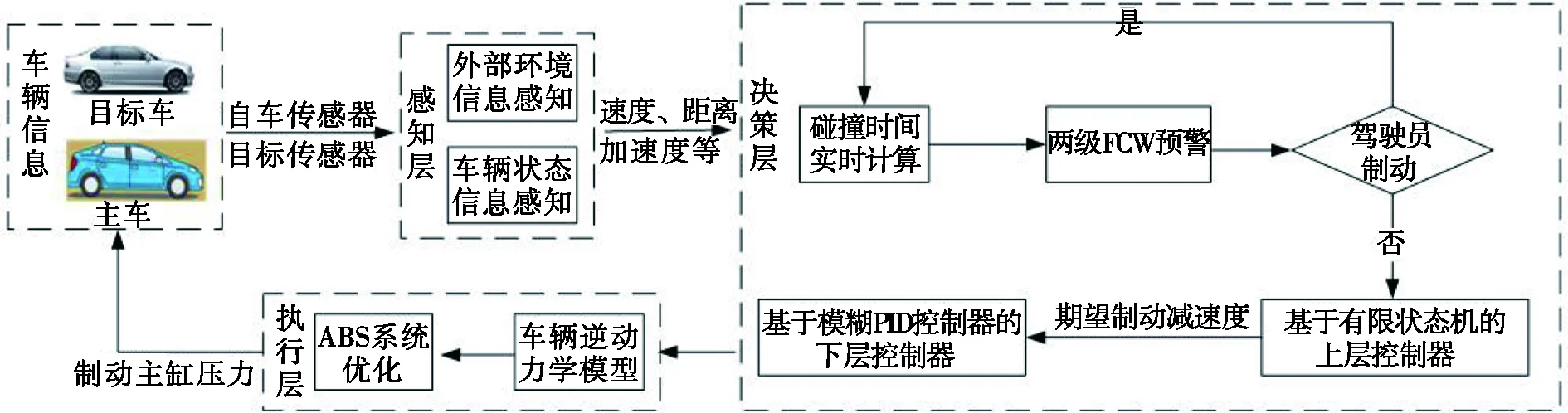
圖2 AEB系統工作流程
2 上層控制器建立
2.1 TTC模型
TTC模型即預碰撞時間模型,指前后車在保持一定速度差的相對運動狀態下,后車前進到與前車發生追尾所需的時間。計算公式如下:
(1)
其中:Drel為前后兩車相對距離,m;Vrel為前后兩車相對速度,m/s。
在CarSim中設置理想傳感器即可獲取兩車相對距離與速度,從而計算得到實時的TTC值。當Vrel過小時,會出現TTC無窮大的情況,因此設定Vrel最小值為0.01 m/s。
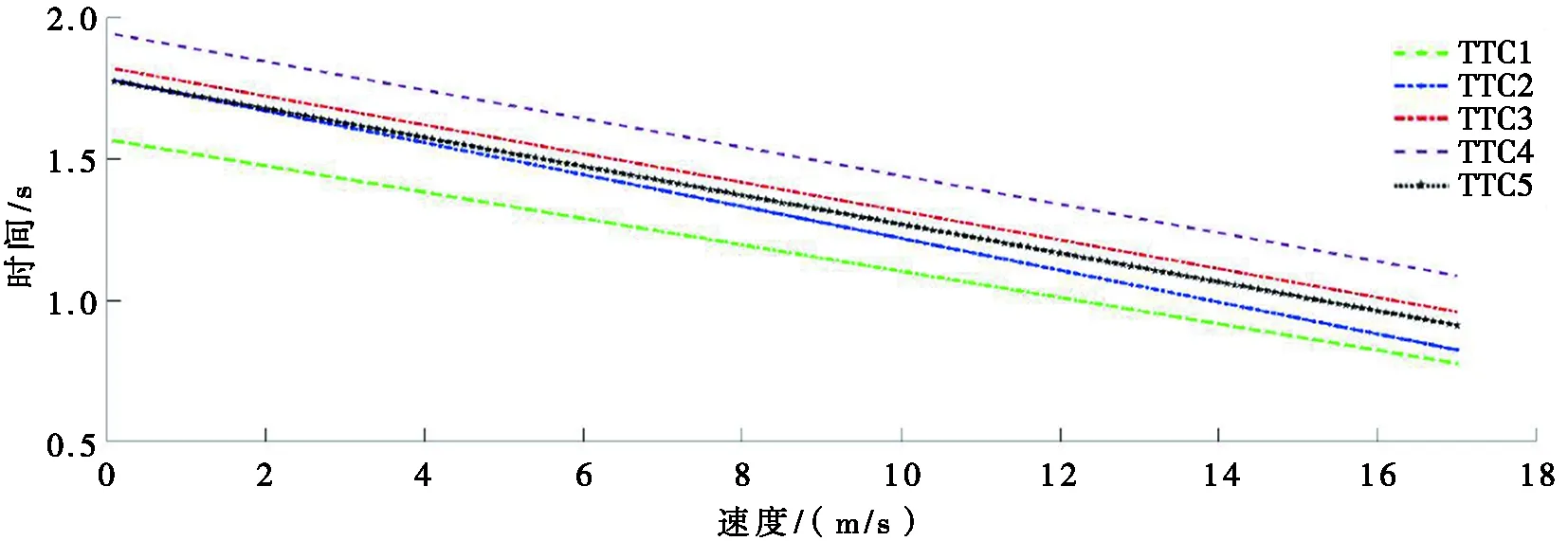
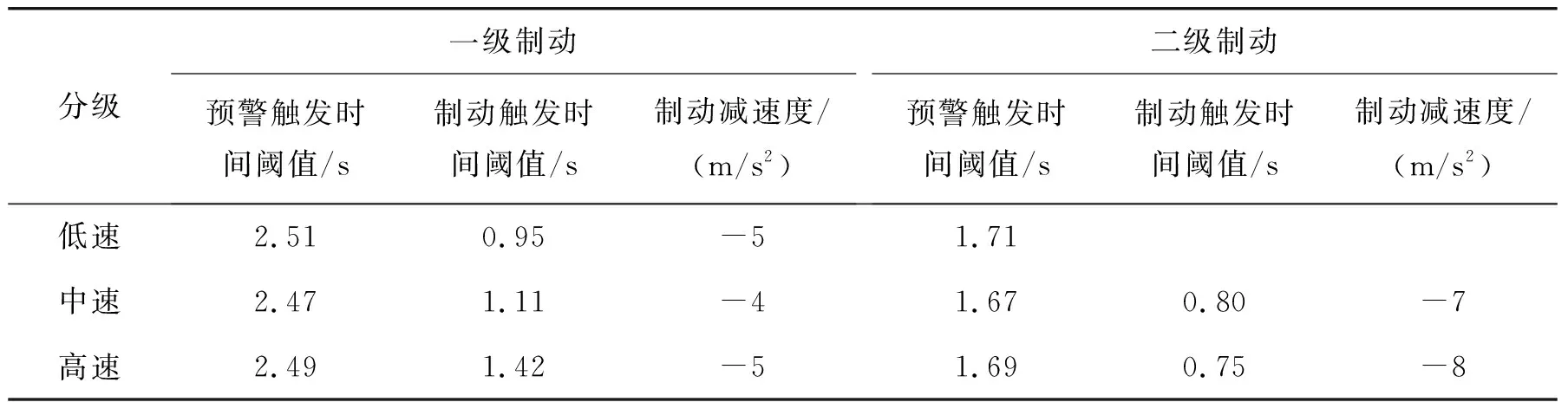
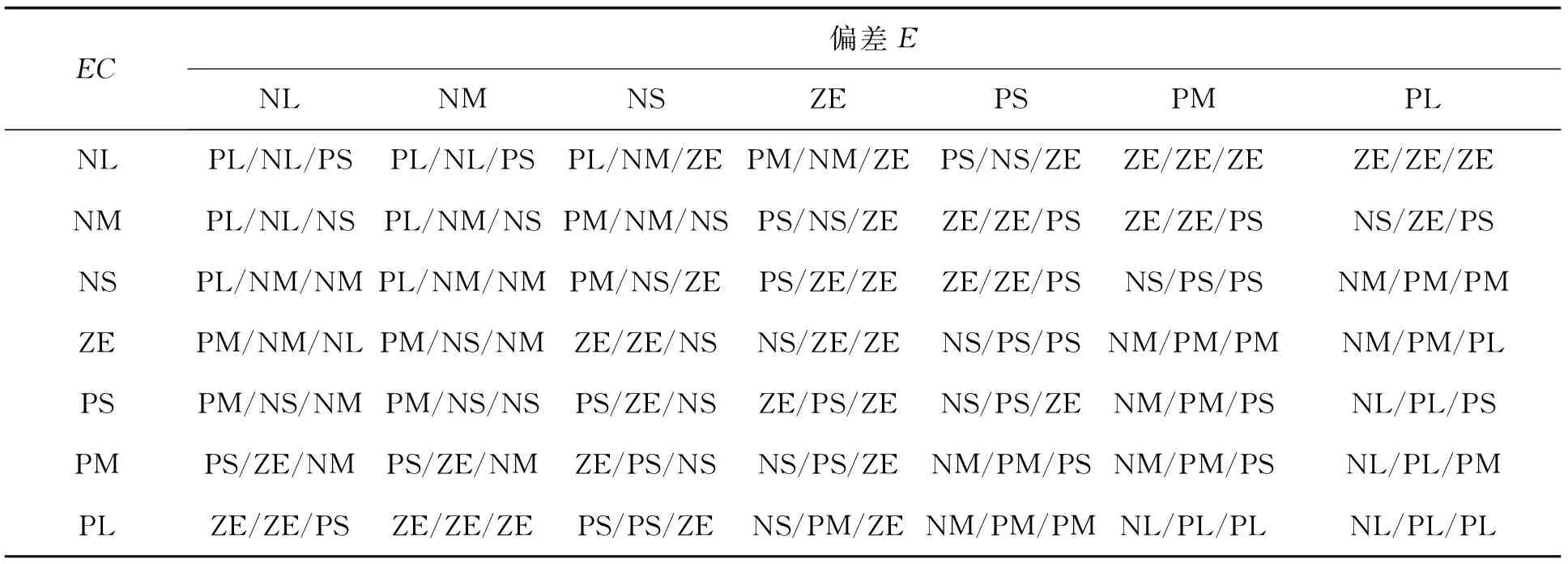
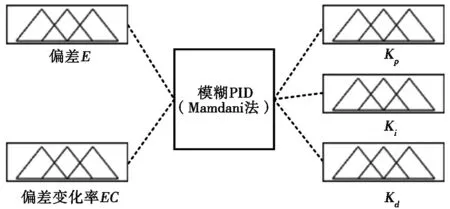
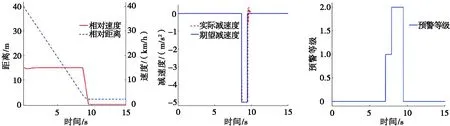
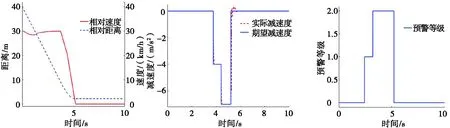
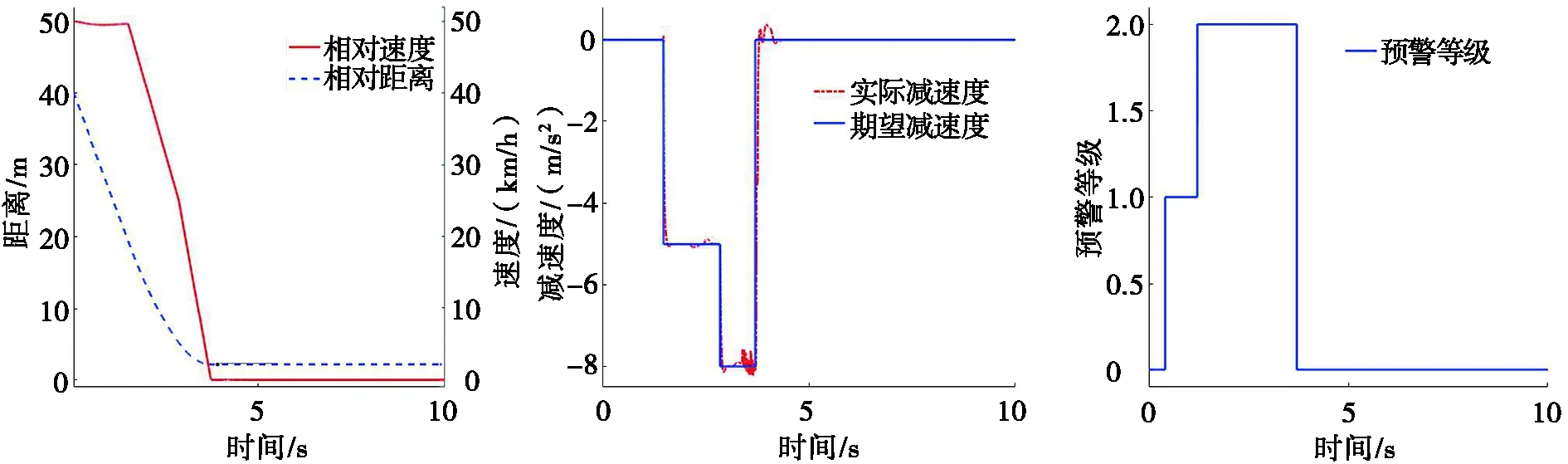
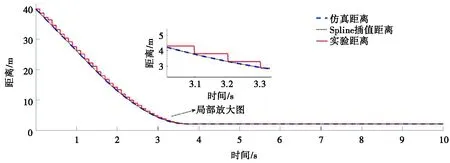
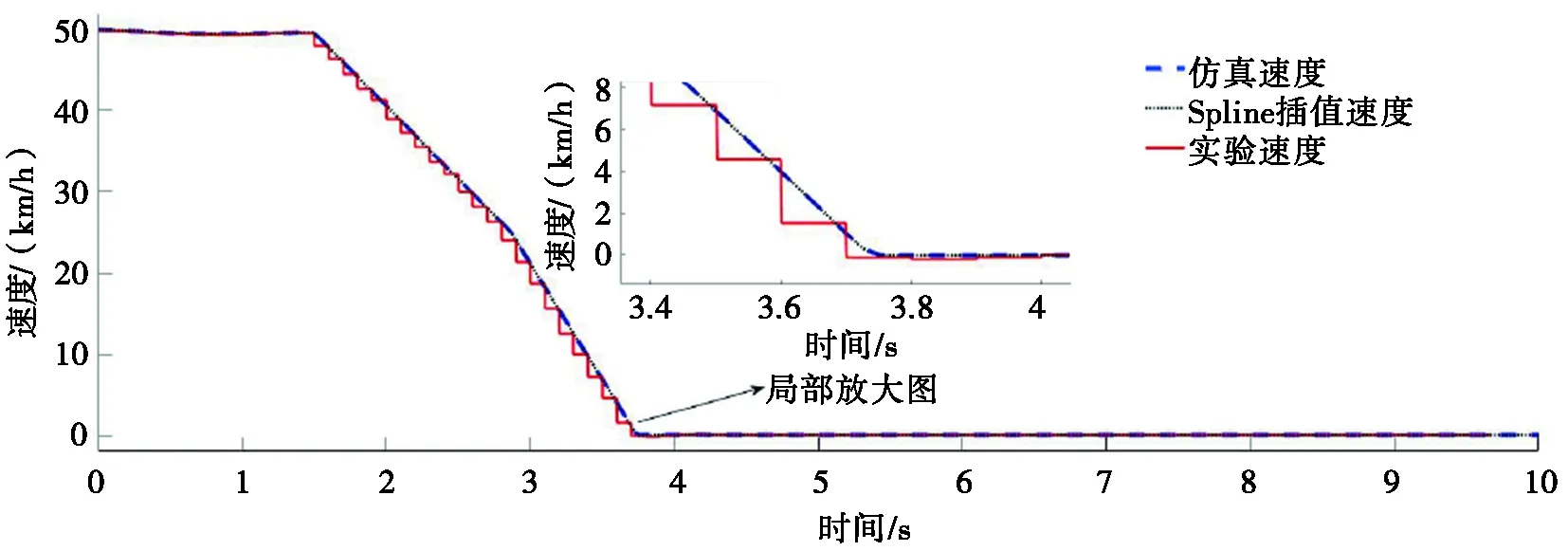
TTC閾值的確定是整個AEB系統的關鍵,在傳統的AEB算法中,往往未對前后兩車相對車速進行細致區分,難以適應實際復雜的交通場景,因此本次研究建立考慮相對速度和時間的TTC模型,對城市道路60 km/h及以下車速進行研究,將速度v分為低速(v≤20 km/h)、中速(20 km/h 本文以虛擬試驗驅動器(virtual test drive,VTD)和Logitech G27駕駛模擬器構建駕駛員在環(driver in the loop,DIL)模擬駕駛試驗臺,VTD可搭建逼真的測試場景、豐富的虛擬傳感器以及較高的實時性而被行業內廣泛使用。由于本文主要針對城市路況進行研究,故在VTD中搭建典型的城市路況AEB測試場景,如圖3所示。 圖3 駕駛員在環模擬器實驗 本次實驗以前車靜止,本車分別以低速、中速、高速接近前車進行。選取30名不同年齡的駕駛員進行數據采集,首先對被測駕駛員進行簡單培訓、熟悉駕駛員在環模擬器設備,并進行初步實驗測試,然后采集多次駕駛員數據并記錄為該駕駛員的數據樣本。主要采集車輛行駛過程中兩車的相對距離、相對車速、本車加速度等信息。由于駕駛員駕駛習慣、年齡、駕駛熟練程度等多方面因素的影響,模擬器所采集的駕駛行為數據具有一定差異,忽略偶發性與無效數據樣本,分析駕駛員在制動過程中的駕駛行為特性,如表2所示。 表2 不同車速下駕駛員行為特性分析 由表2可知:在低速時,由于速度較低,大部分駕駛員僅進行單級制動,而中速與高速時,不同駕駛員的駕駛特性有較大差異,但總體具有速度越快,相應的TTC值以及制動減速度值越大的趨勢。進一步分析現有研究中對駕駛員行為特性的研究,并確定最終的TTC閾值以及制動減速度值。 文獻[15]選取16名駕駛經驗豐富的駕駛員在駕駛模擬器試驗臺,測得16名駕駛員的平均舒適減速度,其平均值為0.53g,故以0.53g為相對舒適制動減速度值的參照值。文獻[16]在國家事故深度調查數據庫(NAIS)中抽取100起實際交通事故進行研究,不同制動減速度下的碰撞事故在這100起事故中所占概率如表3所示。 表3 不同制動減速度的碰撞事故占比 結合表2采集的駕駛員數據和表3分析的實際交通事故案例,考慮到車輛以低速行駛時,頻繁的制動會影響乘車舒適性,且以較大的制動減速度制動對人體的影響相對較小,故低速時選擇全制動,結合采集的駕駛員數據以及對現有研究的分析,分別取表2中各級制動減速度范圍下的平均值作為AEB系統的制動減速度值的初選值,并在Simulink中進行仿真試驗優化參數,確定最終的制動減速度,匯總于表4。 文獻[17]為避免TTC閾值選擇過大或過小的問題,通過大量試驗總結了5 km/h至80 km/h車速下對應的TTC值,其中15 km/h下的TTC為0.92,表2采集的駕駛員TTC數據區間的平均值為0.95,兩者差異較小,因此采用本次實驗采集的駕駛員數據作為制動觸發閾值。同理計算出30 km/h與50 km/h下TTC閾值區間的平均值作為TTC閾值的初選值,最后在Simulink中進行仿真試驗優化參數,確定出最終的制動觸發閾值,并匯總于表4。 文獻[4]利用正交試驗法對駕駛員進行分類,選擇90名駕駛員采集相關數據,最后使用聚類分析法擬合出4類駕駛員反應時間與行駛車速之間的關系,見圖4中的TTC1~TTC4。取速度為0~17 m/s,每隔0.1 m/s為1個采樣點,進而擬合,并求得平均反應時間的函數曲線TTC5。 圖4 不同車速下的駕駛員反應時間 結合圖4數據進行分析,取低速條件下車速為15 km/h對應的時間,中、高速區間下的車速分別為30 km/h、50 km/h相對應的時間,即分別為1.56 s、1.36 s、1.07 s。將一級制動觸發時間閾值與對應平均反應時間之和作為一級預警觸發時間,取一、二級預警觸發閾值間隔0.8 s,并將預警時間閾值匯總于表4。 表4 預警與制動閾值及減速度值匯總表 由于上層控制器輸出的是制動減速度的期望值,故建立車輛逆動力學模型,將期望制動減速度轉化為制動主缸壓力,并設計相應的控制器對制動主缸壓力進行控制。 本次研究設定的路況為水平直線型,且AEB系統開始制動后不存在本車加速前進的狀態,故忽略坡道阻力和加速阻力,在此條件下分析車輛受力情況為: (3) 其中:m為自車質量,kg;a為制動減速度,m/s2;Fxb為地面制動力,N;g為重力加速度,m/s2;f為滾動阻力因數;CD為空氣阻力因數;A為迎風面積,m;v為行駛車速,km/h。 在車輛制動過程中,當地面制動力Fxb小于附著力F時,制動主缸壓力P和制動器制動力為線性相關。設Kb為制動力和制動主缸壓力比例系數,即 Fxb=KbP, (4) 其中:P為制動主缸壓力,MPa。由上述分析,可以得到制動過程中的期望制動壓力Pe: (5) 由于整車動力學模型中存在多變量以及較多非線性關系,傳統PID控制器難以精準實現期望的控制效果,且傳統PID調參過程主要依靠經驗反復試驗,比較費時費力,故融合模糊控制理論,建立模糊PID控制器,以達到響應快、超調量與穩態誤差較小的控制效果。 將期望制動減速度與實際制動減速度的差值作為系統偏差E,定義偏差變化率為EC。在定義模糊控制規則時,以E與EC作為輸入,Kp、Ki、Kd3個參數為輸出。在Matlab模糊控制工具箱中使用模糊語言變量組成模糊條件語句,將精確量模糊化為{NL,NM,NS,ZE,PS,PM,PL},對應為{負大,負中,負小,零,正小,正中,正大},將輸入輸出隸屬函數設置為三角形隸屬函數,模糊控制規則如表5所示。車輛在實際行駛過程中加速度一般(-8~4 m/s2),故E的取值為[-12,12],因此在Simulink模糊工具箱中將E和EC的論域映射為[-6,6][18],同時通過仿真實驗最終將Kp、Ki、Kd3個參數的論域分別設定為[0,3],[30,60],[0,0.04]。 表5 模糊PID規則表 在Matlab中使用模糊工具箱搭建模糊PID控制器,如圖5所示,其語言規則為:If (Eis NL) and (ECis NL) then (Kpis PL) (Kiis NL) (Kdis PS),模糊推理使用Mamdani法,采用面積中心發清晰化[19]。 圖5 模糊PID控制器結構 為了驗證PID控制與模糊PID控制效果,采用試湊法進行反復調試,最終確定PID控制器的參數,其中Kp=3、Ki=45、Kd=0.01,最后以30 km/h的車速對PID控制器與模糊PID控制器在期望減速度的跟隨效果方面進行驗證,測試結果如圖6所示。由圖6可以看出:PID控制超調量最大值為1 m/s2,而模糊PID超調量最大值僅為0.32 m/s2,該超調量的大小直接影響車輛剎停時的俯仰運動程度,超調量小則可以一定程度上提高乘車舒適性。另一方面,模糊PID控制可避免PID控制在5.2 s時產生約14.3%的跟蹤誤差。因此相比于PID控制,該模糊PID控制器具備更好的控制效果,在下一步的仿真和實驗中將采用模糊PID控制器進行驗證。 圖6 不同控制器下制動減速度變化曲線 為測試AEB系統控制策略的有效性,結合C-NCAP與E-NCAP關于AEB的測試方式,采取CCRs(car-to-car rear stationary)前方靜止車輛追尾測試。在CarSim中建立仿真場景,路面附著系數為0.85,道路設置為水平直線型道路,設定兩車初始相對距離為40 m,將本車分別以15 km/h、30 km/h、50 km/h的車速進行測試。測試結果如圖7~圖9所示。 (a) 距離、速度與時間曲線 (b) 減速度與時間曲線 (c) 預警等級與時間曲線 15 km/h工況下,在仿真時間為7.14 s時,TTC值達到一級預警信號觸發閾值,隨后二級預警與制動觸發時間分別為7.94 s、8.70 s,符合對應閾值的設定,最終剎停時兩車間距約2.15 m。 (a) 距離、速度與時間曲線 (b) 減速度與時間曲線 (c) 預警等級與時間曲線 30 km/h工況下,在仿真時間為2.37 s時TTC值達到一級預警信號觸發閾值,隨后二級預警與一、二級制動觸發時間分別為3.17 s、3.73 s、4.37 s,符合對應閾值的設定,最終剎停時兩車間距約2.20 m。 圖(a) 距離、速度與時間曲線 圖(b) 減速度與時間曲線 圖(c) 預警等級與時間曲線 50 km/h工況下,在仿真時間為0.41 s時TTC值達到一級預警信號觸發閾值,隨后二級預警與一、二級制動觸發時間分別為1.21 s、1.48 s、2.86 s,符合對應閾值的設定,最終剎停時兩車間距約2.15 m。 仿真結果表明: 該控制策略在車速為15 km/h、30 km/h、50 km/h的速度下預警與制動均能有效觸發,并保障了車輛的安全性,制動時實際制動減速度與期望制動減速度基本吻合,且在剎停后兩車相對距離為2.15 m。與文獻[14]和文獻[20]對比,本文所設計的AEB系統在不同車速下車輛剎停后均能保持在2.15 m左右的安全距離,且制動過程中首先采取相對較小的制動減速度,有利于減小駕駛員因突然制動而產生不適。 在完成軟件層的模型在環(model in the loop,MIL)測試之后,基于智能汽車“V”流程開發模式,結合Matlab/Simulink自帶的CAN Communication模塊,并通過CAN通訊以及以太網通訊技術進行數據傳輸,利用自動代碼生成技術,結合Kvaser Leaf Light v2 USB 轉CAN 等設備,通過dSPACE平臺的MicroAutoBox與相應的仿真板卡進行測試,最后搭建基于無人駕駛線控底盤平臺進行半實物實驗驗證。無人駕駛線控底盤測試平臺如圖10所示。 圖10 無人駕駛線控底盤測試平臺 結合底盤平臺的相關參數對控制策略進行適配,以仿真測試中50 km/h的車速在底盤測試臺架上進行實驗驗證,結果如圖11~圖14所示。 圖11 相對距離變化曲線 圖12 相對速度變化曲線 圖13 FCW預警信號變化曲線 圖14 制動減速度值變化曲線 從圖11和圖12可以看出:實驗采集的相對距離與相對速度曲線由于采樣頻率以及慣性響應延遲等原因,存在一定的“鋸齒感”,采用Spline插值法對實驗數據進行擬合,擬合數據與仿真數據保持一致。從圖13可以看出: FCW預警信號可以有效的觸發,并及時地響應。從圖14可以看出: 實驗過程中的制動減速度可較好地跟隨期望制動減速度。綜上所述,通過該底盤平臺,對控制策略在自動代碼生成、CAN總線通訊以及執行器的響應等方面進行了實驗,進一步驗證了控制策略的有效性。 (1)利用駕駛員在環模擬駕駛實驗有效地采集了駕駛員數據,并通過設計模糊PID控制器實現了對期望減速度較好的跟蹤,搭建了考慮駕駛行為特性的AEB系統控制策略,有效地避免了AEB系統過早或過晚介入的問題。 (2)參考C-NCAP與E-NCAP關于AEB系統的測試要求,設計了前車靜止場景的測試方案,通過CarSim與Matlab/Simulink的聯合仿真測試與基于無人駕駛線控底盤平臺的半實物實驗,充分驗證了AEB系統的有效性。2.2 基于駕駛員在環模擬器的駕駛行為分析


2.3 制動減速度的確定

2.4 TTC閾值的確定
3 下層控制器的建立
3.1 制動壓力控制
3.2 模糊PID控制器

4 聯合仿真仿真測試
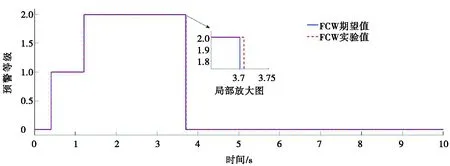
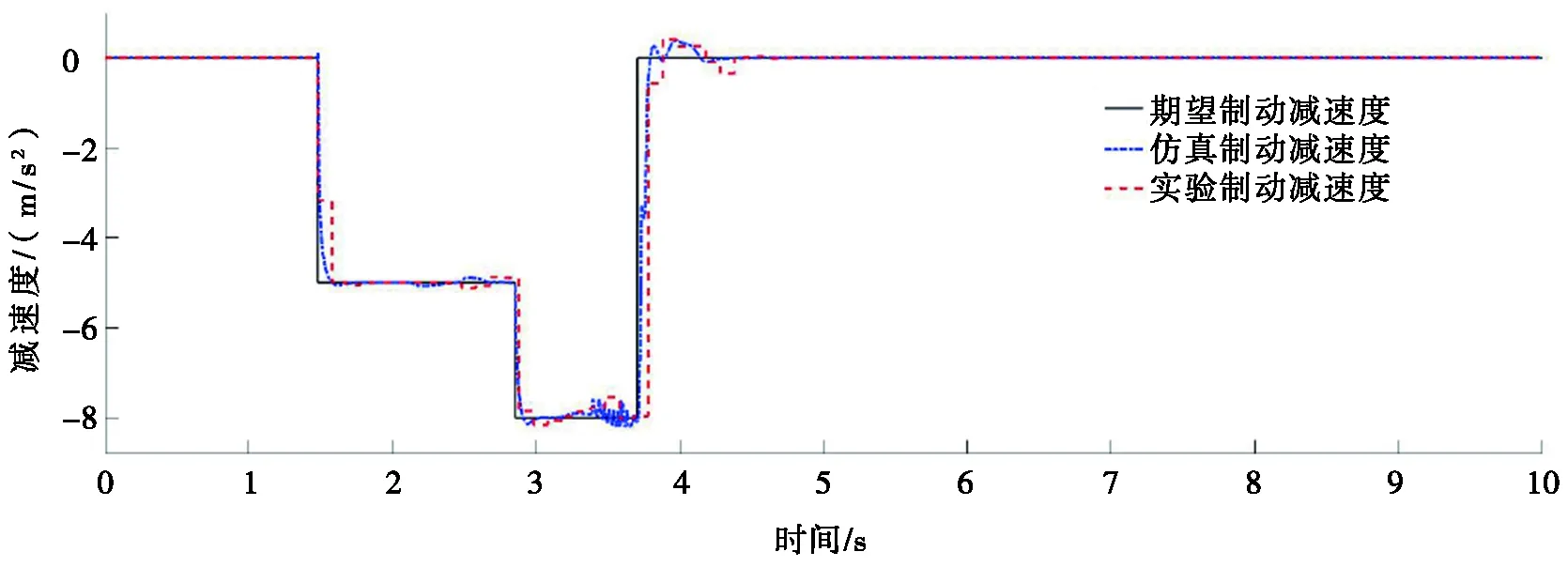
5 基于無人駕駛線控底盤平臺的半實物實驗驗證

6 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26