臨時橋梁智能控制系統框架研究
2023-09-21 08:17:18黃紹虎
科學技術創新 2023年22期
吳 坤,黃紹虎,潘 勇,杜 超
(安能西藏建設發展有限公司,西藏 拉薩)
引言
在搶險救災、臨時通道、旅游景點等場景中都必不可少地會使用到臨時橋梁,臨時橋梁能夠快速搭建,方便人員和物資地快速疏散和運輸。然而,傳統的臨時橋梁安全保障與管理復雜,需要大量專業人員進行管理和維護,安全性并不能完全保證,且其自動化水平與智能化水平相對較低,消耗大量人力、物力和財力[1]。
在現代社會,智能化技術正在深入影響各行各業的發展,為解決傳統臨時橋梁的上述問題提供了有力的技術支持。為解決臨時橋梁的運營穩定性和安全性問題,本文借鑒了最新的智能化技術,設計出一套臨時索道橋智能控制系統框架。
本框架主要由動態稱重系統、實時測速系統和智能道閘系統組成,采用了傳感技術、無線通信技術和計算機控制技術等前沿技術,以提高監測的準確性,同時提高臨時索道橋的使用效率和安全性能,實現對臨時索道橋的實時監控和智能化管理。通過本研究,實現減少人工,高效運行,低風險管理的臨時索道橋運營模式。為今后臨時橋梁的運營管理提供了參考。
1 項目概況
某高寒高海拔臨時交通橋由1 號橋、2 號橋連接兩岸連接道路,兩座橋均采用單車道索道橋,凈跨均為350 m。單幅橋面凈寬4.5 m+2 0.75 m,單向行駛。兩座臨時交通橋的設計高程均為3 325 m,跨中最大垂度為6 m,設計行車速度為10 km/h,設計使用年限為7 年。
2 系統設計需求
2.1 動態稱重需求
在車輛上橋前布置稱重設備,對想要上橋的車輛進行不停車稱重,通過系統進行稱重數據存儲,并且對超重車輛進行警示,禁止超重車輛上橋,從而保證臨時橋梁的運營安全。
2.2 實時測速需求
對于橋上車輛的行駛速度進行實時監測,對超速車輛的超速時間、速度、位置等信息進行記錄,并且通過LED 顯示屏對超速車輛進行警示,要求駕駛員進行減速,保障車輛的運行安全。
2.3 智能道閘需求
在橋梁的上橋處設置智能道閘,當橋面情況正常時,智能道閘按照常規情況運行,對于超重車輛或不滿足上橋要求的車輛禁止放行,滿足上橋要求的車輛予以正常放閘通行。若橋面結冰或發生其他橋面不滿足通行的情況,道閘將關閉,禁止一切車輛上橋,從而保障車輛的安全。
3 智能系統框架設計
3.1 動態稱重系統
3.1.1 動態稱重系統總體結構設計
動態稱重系統是臨時索道橋智能控制系統框架的核心組成部分。確保上橋車輛的載重在臨時橋梁設計范圍內,是保障臨時橋梁安全運營的首要條件。
在進入橋梁區前的外延路段設置交通標識牌,提示進入臨時橋梁會限重,并設置嚴禁超載的警示標志,對擬通過大橋的超限車輛進行提前警示。在連接臨時索道橋兩端入口路段設置交通禁令標志牌,要求上橋車輛分道限速行駛,并將文字標注在路面上。在稱重設備前50 m、100 m 處均設置提示牌,提示稱重設備位置,提醒車輛即將進入稱重測速區。在每個車道布置稱重設備,并配備龍門架攝像機、圖像識別儀器。在識別車牌的同時,對過往車輛進行不停車稱重。稱重設備后方50 m 處布置LED 情報板,顯示超重車輛車牌信息。控制管理分中心設在就近的橋管所,記錄車輛信息和監控圖像,并存入數據庫。
3.1.2 動態稱重系統工作流程
當車輛通過橋梁上的動態稱重設備時,對其稱重同時進行車牌識別。稱重數據將被傳輸到計算機經過軟件處理,處理后的數據將返還到用戶界面供管理者查看。若動態稱重設備監測到車輛超重,則會將超重車輛的車牌號顯示在LED 顯示屏上,禁止車輛上橋并且警告車輛駛離橋梁[2]。若被檢測車輛沒有超重,則能夠正常通過橋梁。動態稱重系統工作流程如圖1 所示。
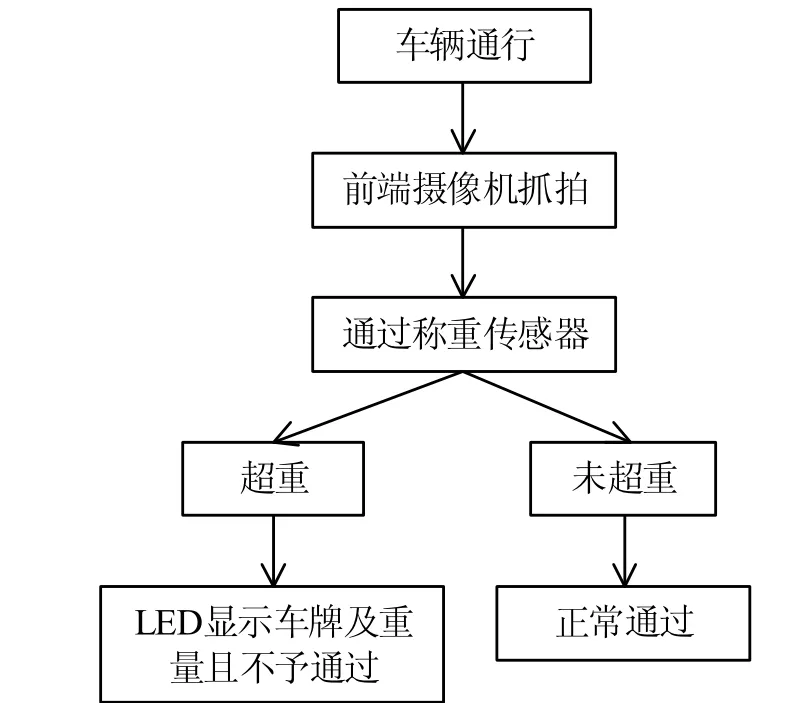
圖1 動態稱重系統工作流程
動態稱重模塊:當車輛通過窄條彎板時,彎板式稱重傳感器以及線圈傳感器將檢測車輛通行的數據信息,并將信息上傳到中心控制器CPU 模塊進行處理和判斷,然后通過CPU 模塊上的網絡接口將信息輸出至發送機,再經過光端機接入主線光纜,傳輸至監控中心機房,經過接收機直接連接到機房核心數據交換機上,最后傳到機房存儲服務器上,將獲取的數據交由服務器分析和處理。
車牌自動識別模塊:前端攝像機通過超五類室外網線與車輛自動識別儀器連接,前端攝像機輸出的網絡視頻信號接入車牌自動識別的網絡端口,前端攝像機設備輸出觸發信號接入LED 頻閃燈中,實現對監測范圍內的通行車輛車牌的自動識別。前端攝像機抓拍的視頻資料同樣可以傳輸至機房核心數據交換機中,由設備上的管理存儲服務器進行數據處理。
報警顯示模塊:當檢測出超過限制重量的車輛時,計算機將發送超重車輛車牌號以及載重信息至數據處理卡上。通過光纖收發器將信息傳送到LED 顯示屏控制器,最終在LED 顯示屏上顯示超重車輛信息。提示駕駛人員車輛超重,不滿足上橋要求,需駛離橋梁,從而限制上橋車輛通行。
動態稱重系統的設計理念在于智能化、自動化和人性化。對于智能化,通過將傳感器和無線通信技術的集成,使得系統能根據采集的載重數據自動進行運算和控制;對于自動化,系統可以在沒有人工干預的情況下,自動完成上橋車輛載重監測和超重報警;對于人性化,系統設計了友好的用戶界面,操作者可以通過觸控屏幕,方便的查看和控制系統的運行狀態,實時查看上橋車輛的載重信息和超重車輛的信息。
3.2 實時測速系統
3.2.1 實時測速系統的總體結構設計
實時測速系統是臨時索道橋智能控制系統框架的另一個關鍵部分,其目的在于保障通行車輛在索道橋上的行駛速度處于一個安全可控的范圍內,從而保障臨時橋梁的運營安全。
實時測速系統采用雷達測速技術,先初步測速,作為觸發錄像抓拍的手段;通過視頻圖像處理技術,對超速行駛的車輛進行確認;利用車牌識別技術,對超速行駛的車輛進行車牌識別,確定車輛超速行駛的時間、地點、車牌號碼和車速等信息;數據傳輸通過光纖進行,在車輛行駛方向的下游,利用LED 電子顯示屏進行超速警示[3]。并將超速車輛信息進行存儲,以供橋梁管理部門調查。
3.2.2 實時測速系統工作流程
當車輛進入監控區域后,首先進行雷達測速,如果車輛未超速行駛,則車輛正常通行,不做任何處理;如果測得車輛超速行駛,啟動前端攝像頭,通過視頻采集卡將監控車道的視頻圖像實時傳輸到測速工控機上,通過軟件進行分析處理[4]。當確認車輛超速后,記錄超速時間、車速、地點等信息,通過前端攝像設備識別車牌。通過光纖進行遠距離傳輸,在車輛行駛方向下游50m 的LED 顯示屏上進行超速警示,并儲存超速車輛信息。實時測速系統工作流程如圖2 所示。
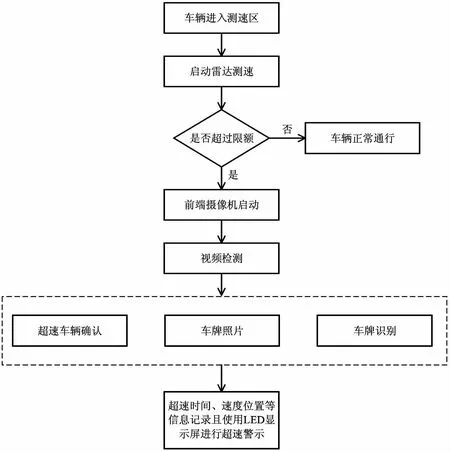
圖2 實時測速系統工作流程
雷達測速模塊:雷達測速采用多普勒效應,雷達發出一個脈沖微波,當微波射在車輛上時將被車輛反射,然后雷達接收這個反射微波,通過對發出的微波與接收的微波之間的頻率進行計算分析,可獲得車輛的行駛速度。若車輛行駛速度沒有超過限額,則不進行后續處理;若超過限額,則將對車輛車牌進行識別和警示。
車牌自動識別模塊與報警顯示模塊和動態稱重系統中的對應模塊相同。
實時測速系統的設計理念在于先進、簡潔和高效。先進表現在采用了最新的計算機控制技術和電子技術,實時測速系統能實現高精度的速度監測;簡潔體現在該系統結構簡單,識別原理簡單,便于使用和維護;高效體現在,實時測速系統具有較快的響應速度,系統能準確且快速地進行速度識別和警示,從而最大程度地保證橋上車輛行駛速度在規定范圍內,保障車輛的通行安全和臨時橋梁的運營安全
3.3 智能道閘系統
智能道閘系統的主要目的是控制車輛能否上橋。由于臨時橋梁的通行條件比普通橋梁苛刻一些,因此需要對車輛的上橋條件進行考察,當條件不滿足時,智能道閘系統將關閉道閘,禁止車輛上橋,從而保障車輛安全以及橋梁運營安全。
當車輛經過動態稱重系統測量后,結果為超重時,將通過LED 顯示屏通知超重車輛禁止上橋,并且,動態稱重系統將信息傳輸至智能道閘系統,智能道閘系統接收到超重信息后,將拒絕開閘,避免超重車輛上橋。同時,由于臨時橋梁處于高寒高海拔地區,當氣溫過低時,橋面可能有結冰的情況,當橋面情況不滿足安全通行時,管理人員將通過LED 顯示橋面情況,并且利用智能道閘系統禁止所有車輛上橋,以保證橋梁和車輛的安全。智能道閘系統工作流程如圖3 所示。

圖3 智能道閘系統工作流程
結束語
本文通過對動態稱重、實時測速、智能道閘系統的總體結構以及工作流程進行設計和研究,并將其組合成為臨時橋梁智能控制系統的框架。利用該智能系統,能夠對上橋車輛的載重、行駛速度進行監測和限制,將智能化技術有效融入臨時橋梁的運營和管理中,顯著提高了橋梁安全性和通行效率。便于在搶險救災、臨時通道、旅游景點等特殊場景中的應用,減少了人力、物力和財力的使用,為后續類似工程提供了參考。
猜你喜歡
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
山東工業技術(2016年15期)2016-12-01 05:31:04
中外會展(2014年4期)2014-11-27 07:46:46
小雪花·小學生快樂作文(2005年9期)2005-04-29 00:00:00
