基于紅外遙感影像的工業加熱污染有害物質監測系統設計
2023-09-28 02:08:56孫擁軍
工業加熱 2023年7期
董 瑩,孫擁軍
(1.山東省濰坊生態環境監測中心,山東 濰坊 261041;2.濰坊市工業發展促進中心,山東 濰坊 261041)
工業有害物質的主要來源有工業粉塵、有害氣體、余熱及余濕等等[1],目前針對工業加熱污染有害物質監測方法[2-3]存在工作量大以及效率低的問題,隨著重工企業的越來越多,常規的工業加熱污染有害物質監測方法已不能滿足現有工業加熱企業的規模,為了更高效地解決工業加熱污染有害物質的問題,需對工業加熱進行科學監測[4-5]。
文獻[6]提出了基于深度學習的有害氣體感知技術監測系統設計與研究,通過有害氣體地面檢測技術難以滿足對釋放源的定位和有害氣體污染的評估,地面監測技術只能監測到部分的有害氣體擴散方位。實驗結果表明,該監測可以對地面監測進行準確監測,但是存在監測結果不精確的問題。因此,基于遙感影響技術監測方法,是一種重要的有害氣體感知技術監測手段,可實現對釋放源和有害氣體污染的全面監測[7]。現有的有害物質監測方法不僅耗費大量的人力和財力,監測結果也不全面,經常忽略較為隱蔽的有害物質,為了提高監測效率的同時最大程度地降低監測成本,提出基于紅外遙感影像的工業加熱污染有害物質監測系統設計方法,紅外遙感影像中涵蓋的目標物信息十分豐富,采用紅外遙感技術采集釋放源影像,從而實時獲取有害物質污染的實際情況。
1 工業加熱污染有害物質監測系統設計方案
1.1 工業加熱污染有害物質監測系統整體框架與功能模塊
根據工業加熱污染的實際需求和有害物質的特點進行工業加熱污染有害物質監測系統設計,基于紅外遙感技術采集相關數據,在紅外遙感影像的幫助下組建工業加熱污染有害物質監測系統的整體框架[8-9]。系統是由地圖操作、紅外遙感監測預測、遙感影像數據處理以及有害物質信息處理等十大模塊組成,且每個模塊都是獨一無二且互不依賴的[10],工業加熱污染有害物質監測系統架構圖如圖1所示。
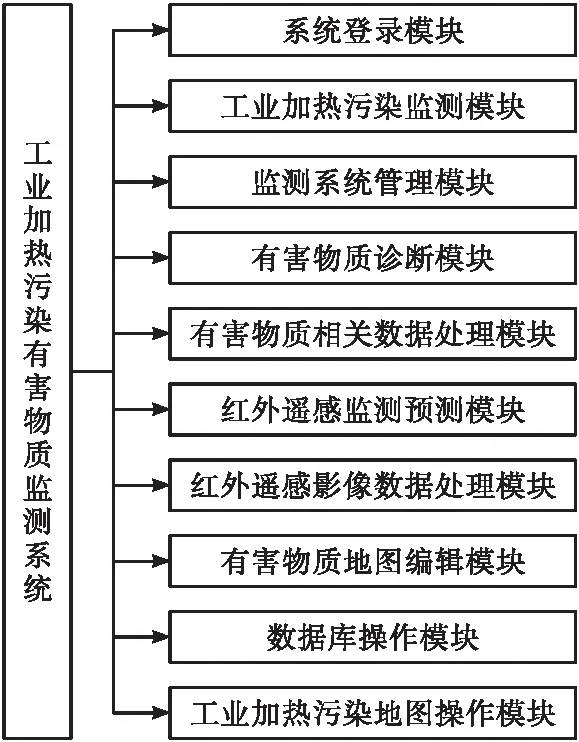
圖1 工業加熱污染有害物質監測系統架構圖
終端無線節點的主要作用是收集工業加熱污染的相關數據以及數據的傳輸[11],系統在初始化完成后會直接收集有害物質相關數據并同步進行傳輸,基于此要求在對節點設計的過程中通過時間觸發完成節點設計,即在相同時間間隔對系統傳感器進行相關信號的收集和處理,完成指定任務后節點即刻進入休眠狀態,具體操作流程圖如圖2所示。
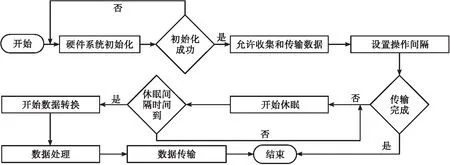
圖2 監測系統節點傳輸流程圖
1.2 監測系統各模塊功能
1.2.1 系統登錄模塊
此模塊也是監測系統的首頁,其主要功能是管控用戶的登錄和退出[12-13],授予普通用戶登錄系統的權限,用戶獲取所需數據后協助用戶退出系統。
1.2.2 工業加熱污染監測模塊
此模塊的主要作用是對工業加熱污染中可能發生有害物質的區域的遙感影像進行監測制圖。
1.2.3 監測系統管理模塊
監測系統管理模塊中存在工業加熱數據庫的用戶列表以及工業加熱污染地圖相關修改等管理功能,可對用戶數據以及工業加熱數據進行實時處理,其中包括對系統高級管理人員進入系統后臺的登錄權限以及退出機制,在此模塊中管理員可對系統中的地圖以及診斷結果等數據進行實時編輯處理。
1.2.4 有害物質相關數據處理模塊
此模塊的主要作用就是對工業加熱污染有害物質進行相關數據的添加、修改、查詢以及刪除處理,具有數據表修改、有害物質信息錄入、實時更新、查詢以及編輯功能。有害物質的錄入是將工業加熱污染的完整數據以及治療、預防數據全部保存到數據庫中,信息的錄入不僅保存相關有害物質數據,還需要將產生的有害物質圖像傳輸到系統服務器中;有害物質信息查詢是對有害物質屬性以及發生區域等所有相關數據的查詢;有害物質編輯模塊顧名思義就是對數據進行實時的修改,并及時更新相關數據,此模塊的架構圖如圖3所示。
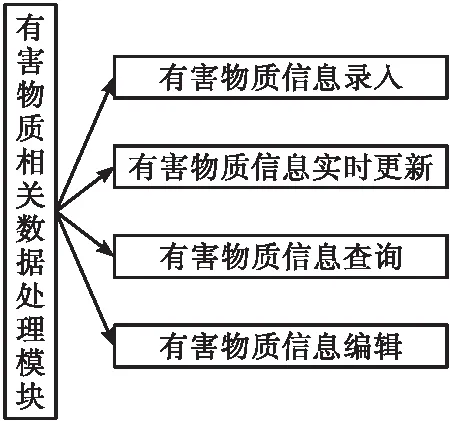
圖3 有害物質相關數據處理模塊架構圖
1.2.5 紅外遙感監測預測模塊
此模塊主要是對遙感相關數據進行處理,該模塊可提前收集病蟲害不同時期的冠層反射特征,并依據特征變化對病蟲害進行預測,此模塊的主要作用是將收集到的數據進行預處理,即對數據的分析以及查錯處理,進而實現監測系統遠程預測病蟲害的目的。
1.2.6 紅外遙感影像數據處理模塊
紅外遙感影像數據處理模塊的作用是加載和瀏覽紅外遙感影像數據,此模塊中包含對紅外遙感影像數據處理的函數計算方法,其架構圖如圖4所示。
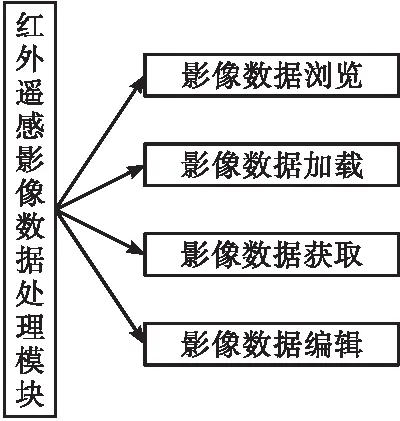
圖4 紅外遙感影像數據處理模塊架構圖
1.2.7 有害物質地圖編輯模塊
該模塊中存在處理有害物質地圖矢量文件的處理函數,主要作用就是對有害物質空間屬性的點和面進行編輯以及屬性查看等,其架構圖如圖5所示。
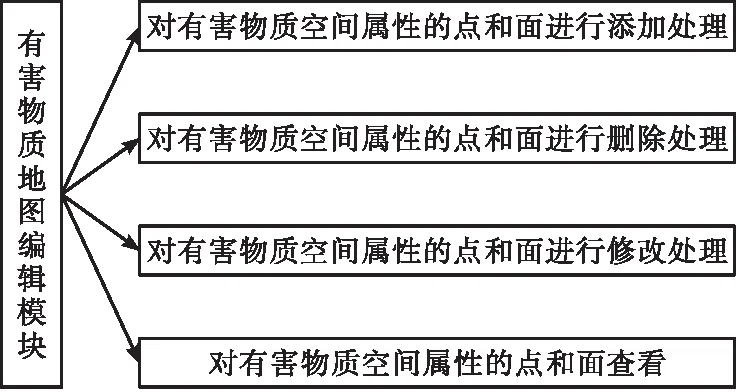
圖5 有害物質地圖編輯模塊架構圖
1.2.8 數據庫操作模塊
此模塊中包含處理數據的相關計算函數,主要作用就是連接監測系統與數據庫,次要作用是修改數據庫內數據,即對數據庫進行刪除以及添加等處理。
1.2.9 工業加熱污染地圖操作模塊
工業加熱污染地圖操作模塊中包含可加載工業加熱污染地圖服務的操作函數,主要作用就是顯示出實時的工業加熱污染地圖以及圖層。
以上就是對有害物質監測系統硬件部分的詳細設計,每個系統中硬件系統和軟件系統都是相輔相成的,因此,需在硬件系統的基礎上設計有害物質監測軟件。
1.3 有害物質診斷算法
以專家歷史診斷數據為基礎,為加強有害物質監測系統性能,在系統的監測計算過程中可通過提取彩色分量[14]對有害物質進行初始篩選,即在彩色分量的幫助下將污染正常位置與有害物質位置進行區分,將正常位置和灰色區域差別較大的分量視為特征提取的備用分量,其中,RGB的灰度轉換表達式為
Y=0.99×R+0.114×B+0.587×G
(1)
式中:Y為彩色圖像轉換成灰色圖像后的結果;R、B和G均為彩色分量。
圖像的灰度的均值之差可體現出圖像之間的差異,標準差能夠體現出圖像之間的離散程度,當差值越小則圖像交叉的概率越小,根據此原理,將灰度均值以及標準差視為篩選彩色分量的標準,則灰度均值的計算公式為
(2)

其中,圖像灰度標準差計算公式為
(3)
根據式(3)分別對紅外遙感圖像進行灰度均值以及標準差的計算,將污染區域的彩色分量與有害物質區域的灰度均值和標準差進行對比,其中,差值比較大的即為有害物質的備用分量。經過初步篩選后得到的圖像區域在自適應雙閾值的幫助下完成污染有害物質特征提取[15-16]。
假設原始污染像素點(i,j)的灰度值為h(i,j),則有害物質監測圖像中像素點(i,j)的灰度值q(i,j)的表達式為
(4)
式中:1為遙感圖像中有害物質區域的像素值;0為遙感圖像中正常區域的像素值;k為影像特征提取結果準確性的閾值。k直接影響到最終有害物質特征提取精度,k值越小,會造成最終不完整,但過大會導致結果中噪聲過多,影響監測效率,所以必須保證閾值不會過大也不會過小,進而得出有害物質的灰度值,從而在初始篩選結果中提取出有害物質特征,完成污染有害物質的診斷。
2 實驗結果與分析
為了驗證基于紅外遙感影像的污染有害物質監測系統設計方法的整體有效性,現對所提方法進行測試。在某區域進行有害物質監測研究,圖6為該區域污染有害物質區域遙感圖像。
圖6中,白色線為有害物質區域。將所設計的監測系統連通到圖6中的監測點進行測試,利用入網計算機詢問監測網站,對該地的污染有害物質進行實時監測,繪制出一天內監測數據。
2.1 監測系統的操作性能
實驗過程中設定某工廠樣本數據的采集間隔是1 h,經過24 h的監測,隨著溫度和濕度的不同,其中出現有害物質的數量也不盡相同,得出的監測結果如表1所示。
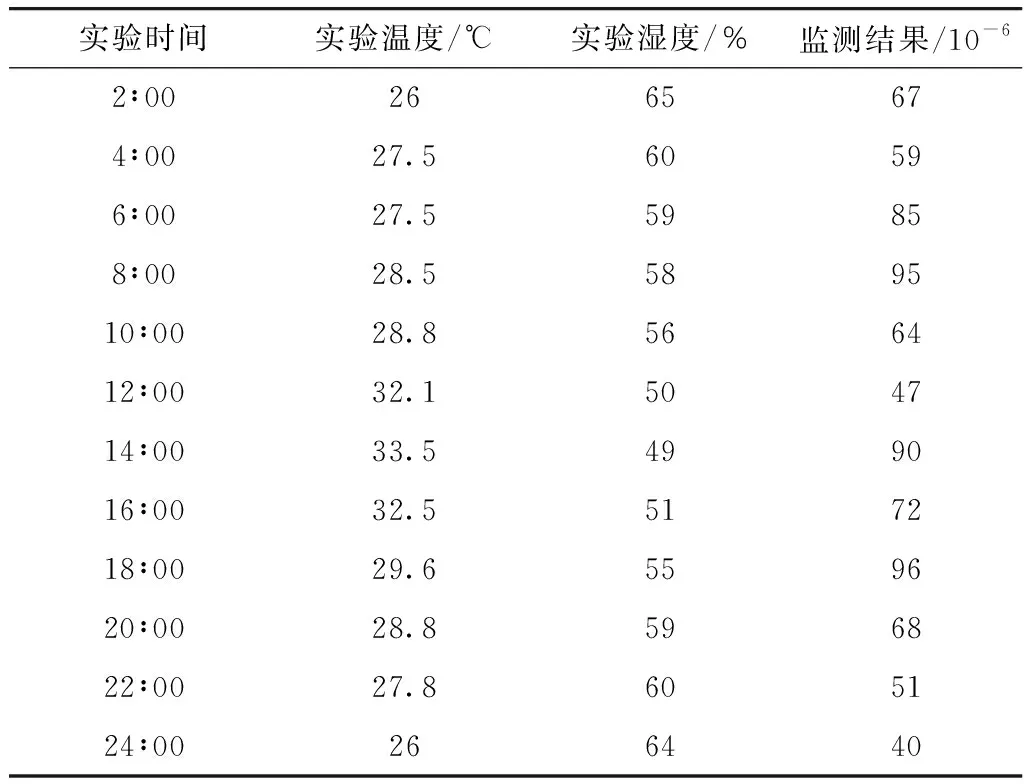
表1 一天中有害物質的監測結果
表1是所提方法在相同時間間隔下對有害物質的監測結果,用戶可以明確得知在不同溫度、不同時間點以及不同濕度下的有害物質情況,降低了系統操作難度,縮短監測時間間隔,便于了解最新污染有害物質情況。
利用所設計監測系統,可知每天不同監測時間內的溫度濕度和有害物質的情況,及時依據特定條件進行污染有害物質處理,進而降低用戶獲取數據的難易程度,減少傳輸流量,降低監測成本,同時由于自動生成相關數據,可大大提高數據傳輸穩定性以及可靠性,同時所設計系統對相關數據的自動整理可污染有害物質提供更加詳實和精確的數據,也能獲取更加完整的污染物質有害監測數據,為監測結果提供更有力的證明,提高監測系統的能力。
2.2 實際有害物質與監測結果的線性回歸分析
污染物質有害監測就是對發生污染物質有害進行統計,監測結果越接近實際結果說明監測精度越高,而線性回歸分析是最能說明監測方法好壞的優劣指標。在上述實驗環境下,隨機選取某一區域的污染進行有害物質5次監測,并對其進行線性回歸分析,橫坐標之間的比值越靠近1說明監測結果越準確,實驗結果如圖7所示。
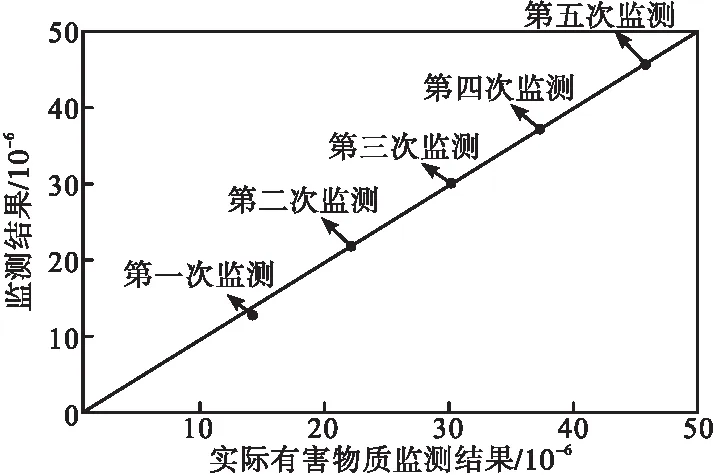
圖7 五次監測結果與實際結果之間的線性回歸分析
根據實驗可知,實驗隨機選取不同的5組污染樣本進行監測,并將監測結果與實際結果進行對比,根據結果可知,所提方法與實際結果處理第一次監測有些許誤差導致兩者之間比值不為1,但也無限接近于1,其余四組監測結果與實際結果之間的比值均為1。由此證明所提方法的監測優越性,這是因為所提方法在設計監測系統過程中利用灰度均值和標準差,對需要監測的污染區域進行正常區域與非正常區域的初步篩選,減少需要監測的部位,大大提高監測效率和計算準確性,從而提高監測精度。
3 結 語
現今城市周邊地區多以工廠為主,污染的最大的問題就是有害物質問題,經過反復研究得出污染有害物質監測系統,但目前的監測系統操作復雜,基于遙感圖像的優點,提出基于紅外遙感影像的工業加熱污染有害物質監測系統設計方法,該方法主要是通過設計出監測系統的整體結構并詳細介紹硬件系統,根據其中的需求設計出相關軟件系統,將兩者結合,實現污染有害物質監測,解決了監測操作難、可靠性差以及監測精度低的問題。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小學科學(學生版)(2021年7期)2021-07-28 06:44:32
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小學科學(學生版)(2020年6期)2020-08-13 07:47:12
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
當代陜西(2019年7期)2019-04-25 00:22:18
領導決策信息(2018年26期)2018-10-12 02:18:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
