蘋果采摘機器人的結構設計與分析
2023-10-07 07:41:14潘肖楠張玥耿寶龍王琨
中國設備工程 2023年18期
關鍵詞:分析
潘肖楠,張玥,耿寶龍,王琨
(1.隴東學院;2.環縣職業中等專業學校,甘肅 慶陽 745000)
1 前言
我國作為全球最大的蘋果原產地,種植面積達210萬公頃,2022 年新季蘋果產量約3600 萬噸,占世界總產量的50%。蘋果富含維生素和礦物質,而黃土高原借助海拔高、光照充足、晝夜溫差顯著等優勢,尤其適合蘋果種植,蘋果產業作為富民產業,其高質量發展已成為推進區域鄉村振興產業的基礎。近年來,城市化進程加快,農村人口外出遷移,造成農村勞動力資源短缺,隨著農業機械化的普及,越來越多的智能化機械應用到農業生產中。蘋果采摘機器人可以根據果實位置實時調整采摘角度,具有降低果實損傷率、提高采摘效率、節約人力成本等優勢。趙雄設計了一款三自由度蘋果采摘機械臂,輕量化的設計方案在降低整機質量的同時保證驅動力矩符合要求;朱容芳等人利用曲柄搖桿原理,通過調整機械爪帶動蘋果樹干左右搖晃,一定范圍內可使蘋果脫落,適用于非商品果采摘場合;任曉智等提出一種機械臂夾剪蘋果采摘機器人,可實現蘋果的采摘及傳輸功能;孫浩等設計出一種六自由度的蘋果采摘機械臂,并建立軌跡規劃模型,通過運動學仿真,論證其實際工作的可行性;高群設計出一種輪式電動5 軸蘋果采摘機,適應于地面平坦的采摘環境。
基于以上情況,本文針對黃土高原地區果園地形,依托麥克納姆輪承重行走機構設計出一款蘋果采摘機器人,以滿足當地采摘需求。
2 結構設計與原理分析
考慮到果園環境的非結構化以及我國北方蘋果樹種植方式的特點,蘋果采摘工作具有復雜性和不確定性。為保證運動平穩可靠,本文設計出一個靈活性高、適應性強的蘋果采摘系統,圖1 所示為蘋果采摘機械結構三維模型圖,機構由麥克納姆輪承重行走機構運動平臺、Stewart 六自由度并聯機構、采摘機械臂、視覺傳感器、末端執行器等組成。
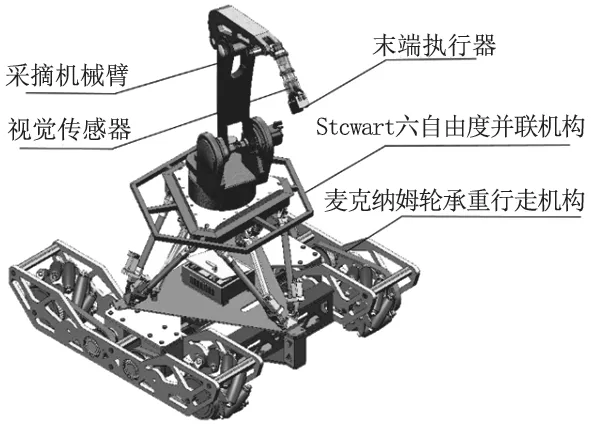
圖1 采摘機器人結構圖
采摘機器人采用無線信號控制,底部承重平臺上置有一個控電柜,內部包含主控器、信號接收器、信號發射器等,在六自由度承重平臺下方焊接一圈圓形導軌,并在其上方安裝可繞導軌環形運動的移動攝像頭,攝像頭可向上仰角20°,向下俯角60°,帶有三關節,實現可自由旋轉360°。
在機器人工作期間,可通過手機配合手柄控制車體運動方向,末端執行器上裝有顏色識別傳感器和微型超高清攝像頭,首先,通過攝像頭獲取蘋果位姿圖像,提取RGB 信息判斷采摘對象是否成熟;其次,利用紅外傳感器獲取蘋果是否在抓手可采摘范圍信息;最后,通過控制器控制電機,進一步控制末端執行器執行抓取動作,執行器由兩塊長度為137mm 的內凹板做夾取手指,手指與果實的接觸部分使用軟硅膠墊來做防護,采用齒輪齒條機構實現手爪的張開與閉合,利用步進電機與直線模組的搭配實現高精度的進給來對果實進行抓取,該執行器可抓取蘋果的最大直徑為186mm,最大負載為70N。
3 Stewart 六自由度平臺運動分析
3.1 問題描述
六自由度平臺多用于飛行器、運動模擬訓練裝置等,是一種并聯機構,其通過改變六個伸縮動作來實現空間中的六自由度運動。
本文設計的平臺由固定底座、運動平臺、十字虎克鉸、電動缸以及氣動缸系統組成,現需模擬出六自由度運動平臺的各個極限位置的運動軌跡曲線,以便通過該軌跡曲線分析采摘機器人的工作適應性。
其中,電動缸伸縮范圍為:175 ~700mm,不考慮物體之間的阻尼與摩擦等因素,模型材料統一設定為Steel,使用SolidWorks Motion 對該六自由度平臺進行缸體動力學分析。
3.2 問題分析
平臺的長、寬均為1600mm,當電動缸處于最低姿態時,整個平臺的高度為1100mm,為保證分析結果的準確性,確定以下步驟:
Step1:簡化三維模型,去掉所有軸承組件、定位螺栓組件,去除多余零部件;
Step2:使用SolidWorks 的動畫模塊做出平臺整體運動效果;
Step3:將動畫數據導入SolidWorks Motion 中以確定馬達的驅動方式;
Step4:施加仿真條件,進行計算;
Step5:對求解的結果進行提取,得到相應的軌跡追蹤線;
Step6:針對該計算結果進行分析。
該平臺整體由電缸主驅動,氣缸進行隨動,在實際工程問題中,隨動氣缸起到分擔支撐力的作用,故在本次分析中將該部件及其所帶附件去除。在多剛體運動分析中,常選用數據點和振蕩馬達兩種方式進行驅動。其中數據點驅動為間斷控制方式,是在給定電動缸位移范圍為0 ~500mm 和作用時間范圍0 ~2s 內取數據點,得到333 個數據點進行分析。而振蕩馬達屬于連續性控制方式,相較數據點方式更為穩定。振蕩馬達的主要控制參數有兩個:運動頻率和運動幅值,通過計算可得振蕩馬達運動的最大頻率為0.5Hz,最大振蕩幅值為300mm。雖然振蕩馬達的控制方式較平穩,但只能得到豎直方向的最大值與最小值。因此,本文最終選擇了更直觀便捷的線段驅動方式,這種方式主要研究位移與時間的變量關系,使用的參數也可經過模塊模擬驗證。在整個系統運動過程中,主要考慮:三對角方向最大值、豎直方向最大值、左右擺動值。本次分析的是平臺運動極限位置的包絡曲線,故六個電動缸設置參數均為極限位置,得出一個電動缸的驅動參數即可。
3.3 Stewart 平臺剛體運動仿真及分析
加載接觸、材料及重力后,首先需進行計算,檢查是否發生運動偏移,以確定模型的平穩性,再設置實體接觸、重力等必要邊界條件,模型材料選擇Steel(Dry),為減少Motion 計算量,關閉實體接觸摩擦,馬達與零部件處于相對移動狀態,故運動類型采用前設定好的線段驅動類別,打開運動算例屬性中的精確接觸,以提高計算準確度。
通過分析及計算,最終得到包絡曲線空間圖如圖2所示。

圖2 包絡曲線空間圖
通過分析Motion 仿真結果,得出以下結論:(1)線段方式的馬達驅動更具針對性,且能保證運動的連續性;(2)模型簡化時考慮去除了結構中一些次要因素,大大減少了計算量,但對計算結果未產生本質影響;(3)為提高運算速度,計算的迭代次數等需要修改配置。
4 主要部件的結構與強度校核
4.1 Stewart 六自由度平臺瞬態結構校核
六自由度運動平臺由承載底盤、十字虎克鉸、電動缸、氣缸、頂部承接臺、多邊形承載架等組成,本小節主要對承載底盤進行結構分析。在Workbench 中進行瞬態結構校核,需先進行模型簡化,并將其轉為X-T格式。
求解階段,首先刪除所有接觸關系,將結構設定為幾個主要連接副,如圖3 為底部承載平臺接觸設計總圖。
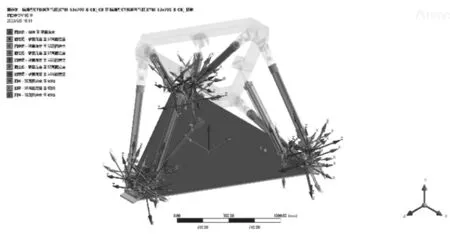
圖3 底部承載平臺接觸設定總圖
此模型要求在Mechanical 中實現姿態控制與運動,因此需給電缸一個位移分量,而Mechanical 中只有X軸可以實現位移,故在設定電缸與氣缸的平移運動副時考慮將電缸及氣缸的行程推桿組成全局坐標系,使得X軸正方向指向電缸桿的伸出方向,以避免后續求解過程中出現位移方向不合理的情況。
通過分析,求解部分收斂性能良好,在其求解完成總圖中,收斂力和標準力均符合要求。
由圖4 可知,在此設定狀態下,底部承載平臺模型在推程導桿伸展150mm 極限位置時最大變形量為0.55mm,但根據云圖數據分析,其在極限位置并未出現過大的位移偏量,故該模型結構穩定,最大彈性應變為5.422×10-9,馮·米賽斯最大應力為0.000685MPa,該機構校核強度符合要求。

圖4 總變形云圖
4.2 末端執行器瞬態強度校核
由于該末端執行器的夾持載荷是隨時間變化的,故對此采用瞬態結構校核,用以確定在受到穩態載荷、瞬態載荷、簡諧載荷下隨時間變化的位移、應力和應變。由于該機械結構中慣性力和阻尼無法忽略,故不能使用靜力學分析代替瞬態動力學分析。將模型進行前處理后,轉為X-T 格式。
該執行器主要使用手板、主驅動齒條、從動齒輪、直線模組滾珠絲杠以及定位連桿來進行驅動抓取,故簡化后只需保留以上部件,且零部件應保存為Parasolid格式以便在ANSYS Workbench 中調用。
通過參數設定與求解,得到在250 步迭代完成后,力開始收斂,由圖5 可知,最大變形區域發生在二指根部接觸孔上,所以應在孔周邊區域增加強度,選用高強度的硬質合金可避免此問題,通過分析,接觸狀態下的許用應力及接觸面效果良好,可證明該結構齒輪齒條設計合理。
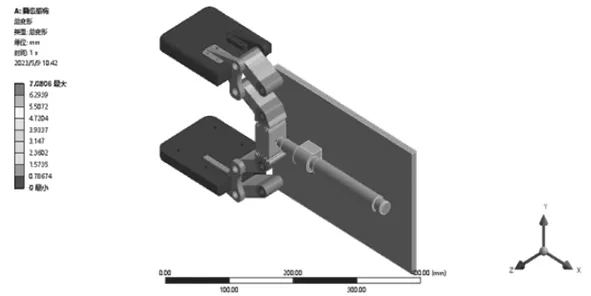
圖5 總變形云圖
5 結語
本文首先對蘋果采摘機器人六自由度平臺進行運動學分析,驗證了模型設計的科學性和合理性,其次對行走機構、末端執行機構進行結構及強度校核,結果分析表明,機械結構合理有效。本文設計的蘋果采摘機器人對提高自動化程度,降低勞動強度,實現線下果園實地采摘具有指導意義。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
