特大橋空心墩封頂施工工藝及受力分析
2015-12-06 04:11:24劉衛峰安徽省海通建設集團有限公司安徽合肥230088
安徽建筑 2015年4期
劉衛峰 (安徽省海通建設集團有限公司,安徽 合肥 230088)
1 工程概況
某特大橋全長1746m,孔跨布置為53m-32m簡支T梁,本橋結構型式:橋臺采用雙線T型橋臺;橋墩采用圓端形實體墩和圓端形空心墩兩種型式;基礎除53#臺采用明挖擴大基礎外,其余墩臺均采用鉆孔樁基礎,鉆孔樁共593根。承臺及樁基礎采用C35混凝土,橋臺臺身和實體墩墩身及托盤采用C30混凝土,空心墩墩身及托盤采用C35混凝土,墩臺支承墊石采用C50混凝土。共有混凝土約97730m3。全橋共有空心墩38個,其中最高空心墩60.5m,超過50m的有24個。本文以該橋最高空心墩為例進行闡述,空心墩平板段設計440cm,頂部圓端直徑580cm,墩頂實心部分高110cm,在與實體段部分銜接過渡段采用50cm×100cm的倒角。
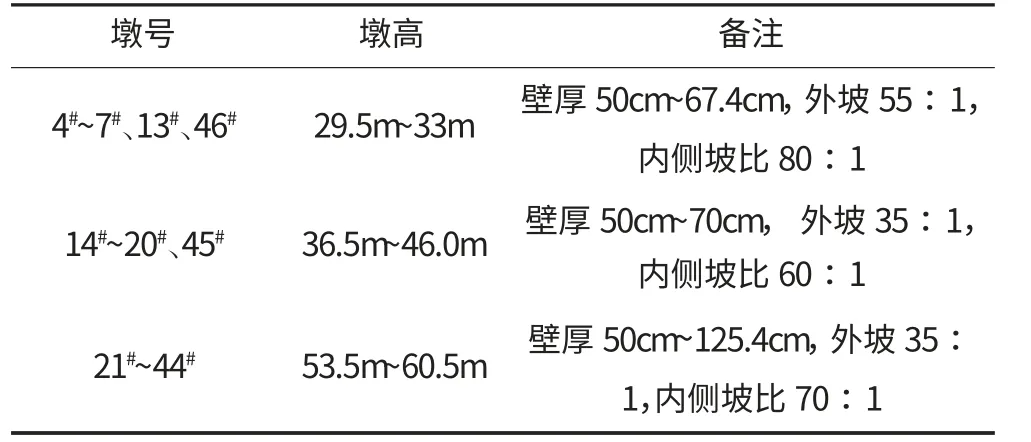
某特大橋空心墩統計表 表1
2 工藝概述
采用在空心墩上倒角上鋪設事先預制好的鋼筋混凝土蓋板,形成底模,為了減輕鋼筋混凝土蓋板的承受荷載,頂部實心段分兩次澆筑:首先澆筑0.5m,待已澆筑段混凝土達到一定強度后,再澆筑頂部2.4m(包含0.6m實心段和頂部托盤頂帽)。后澆筑混凝土重量依靠已澆筑0.5m高實心段鋼筋混凝土結構支撐。先澆筑段與后澆筑段混凝土經過養護后形成一個整體共同作用。鋼筋混凝土蓋板連同橋墩混凝土一起成為橋墩的一部分,無須取出,待下一個墩頂再預制相同的蓋板。封頂示意見圖1。
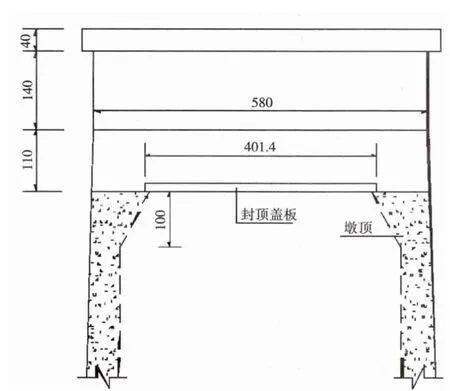
圖1 空心墩封頂示意圖(單位:cm)
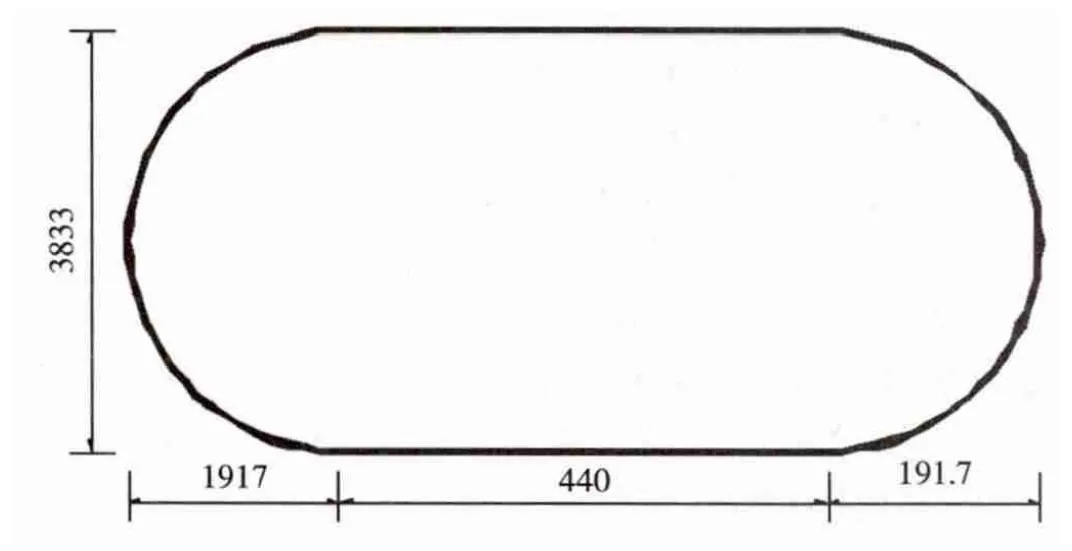
圖2 空心墩頂形狀及尺寸(單位:cm)
3 施工工藝
3.1 蓋板預制
3.1.1 蓋板結構尺寸
根據空心墩頂部空心段尺寸及封頂面積設計出所預制蓋板的結構及尺寸,蓋板可根據其封頂面積的大小及吊裝難易程度將其整體或分段預制。
該橋最高空心墩頂為圓端形,圓端半徑r為2.932m,平段長為440cm,如圖2所示。封頂混凝土蓋板較橋墩頂空心段外均延長10cm,作為擔板。由于面積較大,蓋板采用分段預制,設計板厚為15cm。鋼筋保護層厚度取15mm。蓋板預制分段形狀及尺寸見圖3。
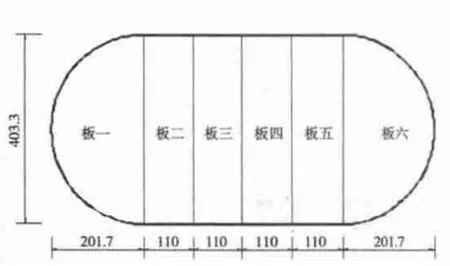
圖3 蓋板分段預制形狀及尺寸(單位:cm)
3.1.2 受力分析及鋼筋布置
①蓋板上部需承受荷載計算
鋼筋混凝土自重荷載
混凝土分兩次澆筑,蓋板只承受0.5m高的混凝土自重荷載P1
P1=(1.922×3.14×2+4.4×3.833)×0.5×24=480.12kN
鋼筋混凝土蓋板自重P2
P2=(2.022×3.14×2+4.4×4.033)×0.5×24=165.5kN
振動器振搗產生荷載P3,荷載集度取1kN/m2
P3=(1.922×3.14×2+4.4×3.833)×1=40kN
傾倒混凝土產生的荷載P4,荷載集度取2kN/m2
P4=(1.922×3.14×2+4.4×3.833)×1=80kN
終上所述,蓋板上部承受的荷載為
P=P1+P2+P3+P4=480.12+165.5+80=765.62kN
則順橋向線荷載為(取1m板寬)
q=765.62/(4.4+1.92×2)/3.833=24.24kN/m
則跨中彎矩為
M=ql2/8=24.24×3.8332/8=44.52kN·m
②蓋板鋼筋布置
查鋼筋混凝土結構計算表得:
AS=1256mm2φ 16@160mm
分布筋按每米板受力鋼筋截面積的15%布置
0.15 ×1256=188.4mm2
分布筋采用φ 8@200mm
蓋板鋼筋布置圖見圖4、圖5、圖6。
3.1.3 混凝土澆筑
為不影響封頂,蓋板的預制可在墩身施工的同時進行,預制地點可在墩身附近選擇場地或在專門預制場預制好后運輸至橋墩處。蓋板預制混凝土強度等級選擇為C35,與上實心段混凝土強度等級相同。
蓋板預制成型主要經過鋼筋綁扎、立模、澆筑、振搗和養護等幾個環節。振搗采用平板振動器,混凝土振搗應保證混凝土密實,同時制作同條件混凝土試件,以檢驗混凝土的抗壓強度。
3.2 蓋板吊裝
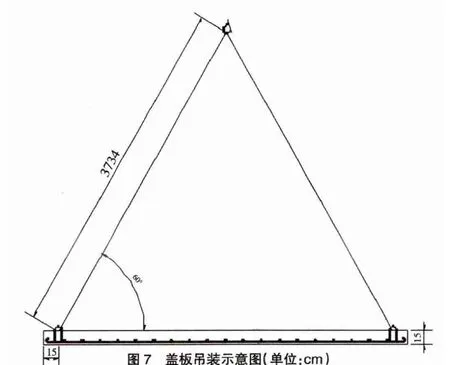
吊裝前應對蓋板進行混凝土強度檢測,用回彈或試壓試件。蓋板澆筑完成后應及時養護,保證混凝土強度達到設計強度的80%以上時才可以吊裝。吊裝采用塔吊吊裝,每塊蓋板預制過程中在四角均埋設4個吊環,吊環采用直徑20mm的一級鋼筋,吊環彎心直徑2.5d,底部與主筋焊接牢固。吊裝時用4條等長的鋼絲繩一頭分別懸吊4個吊環,另一頭掛入吊鉤上,然后起吊安裝,吊裝時必須保證蓋板水平,不得傾斜。蓋板起吊到位安裝時,蓋板兩邊擔板尺寸必須相等。可在上倒角上部用墨線彈出蓋板位置。蓋板吊裝示意見圖7。
4 結 語
鐵路橋梁空心墩封頂施工中如采用搭設滿堂腳手架和預埋牛腿的方式,不僅費時、費工、費料,而且施工周期長,并且施工支架過高難以保證結構的安全可靠。采用鋼筋混凝土預制蓋板進行封頂施工,墩身高度不受限制,而且施工過程省工、省時、操作簡單,施工安全風險大大降低。缺點是頂部荷載大,混凝土無法一次澆筑完畢,需分次澆筑,蓋板無法重復利用,每個橋墩封頂需預制新的蓋板。
該橋空心墩封頂原方案設計為預埋型鋼牛腿,經實際實施情況看,該方法施工正常周期需10d以上,且工人在狹窄的空間內操作,拆模難度較大,工人均從下往上拆除支架,安全風險較大。改為預制蓋板封頂后,僅需半天就可以將蓋板安裝到位,充分驗證了該施工方法的可行性和優越性,并可為其它類似工程提供參考。
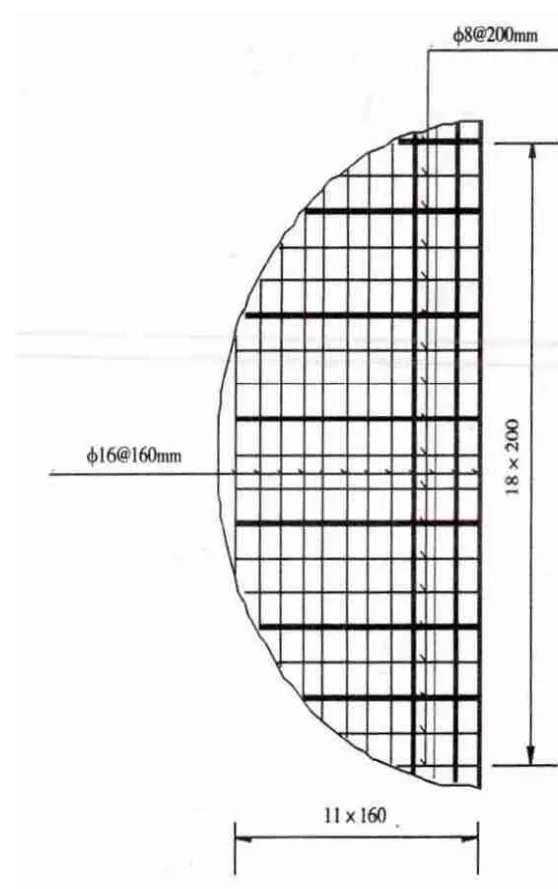
圖4 板一、六鋼筋平面布置圖
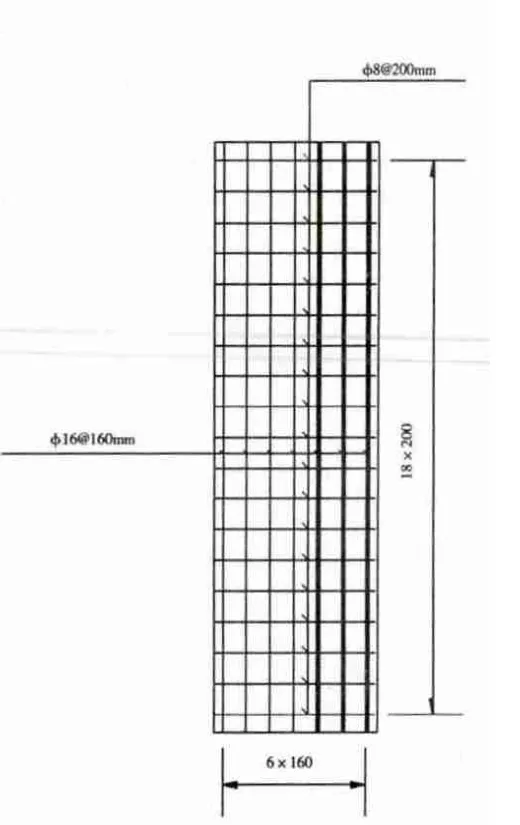
圖5 板二、三、四、五鋼筋平面布置圖

圖6 板二、三、四、五鋼筋正立面布置圖(單位:cm)
中南建筑設計院.混凝土結構計算圖表[M].北京:中國建筑工業出版社,2002.
猜你喜歡
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2022年10期)2022-07-28 03:04:00
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
建材發展導向(2021年7期)2021-07-16 07:08:04
水利規劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34