一種星載相對測量設(shè)備的在軌標(biāo)定方法
2023-10-10 02:47:26黃業(yè)平鄧武東郭正勇
制導(dǎo)與引信 2023年3期
黃業(yè)平,王 瑞,鄧武東,郭正勇,劉 政
(1.上海衛(wèi)星工程研究所,上海 201109;2.上海航天控制技術(shù)研究所,上海 201109)
0 引言
隨著太空技術(shù)的發(fā)展,航天工程已逐步從傳統(tǒng)的遙感、通信、導(dǎo)航等任務(wù),向在軌服務(wù)、在軌裝配、編隊飛行等新型任務(wù)拓展[1]。這些航天任務(wù)涉及到一項共性技術(shù),即高精度相對測量和相對導(dǎo)航技術(shù)。
高精度相對測量是實現(xiàn)高精度相對導(dǎo)航的前提,測量設(shè)備早期以微波雷達(dá)為主。20 世紀(jì)60年代初,美國為雙子星座號飛船研制的L波段雷達(dá)采用脈沖測距和單脈沖比幅技術(shù)實現(xiàn)了目標(biāo)跟蹤[2-3]。近年來,隨著光學(xué)技術(shù)、特別是激光技術(shù)的發(fā)展,光學(xué)相機、激光雷達(dá)等新型測量設(shè)備開始用于高精度相對測量。另外,根據(jù)測量設(shè)備特點,可采用分段使用策略實現(xiàn)全航程高精度測量,如遠(yuǎn)距離采用微波雷達(dá),近距離采用激光雷達(dá)和光學(xué)相機等。
發(fā)射前,航天器相對測量、姿態(tài)測量、有效載荷等設(shè)備通過地面裝調(diào)和精度測量實現(xiàn)基準(zhǔn)坐標(biāo)系的統(tǒng)一。但航天器發(fā)射后,由于受主動段振動、在軌重力釋放、熱變形等因素的影響,各設(shè)備的測量坐標(biāo)系與基準(zhǔn)坐標(biāo)系之間、不同設(shè)備的基準(zhǔn)坐標(biāo)系之間會出現(xiàn)一定偏移。如果不對這些偏移進(jìn)行校準(zhǔn),即便測量設(shè)備及星敏感器的測量精度再高,也無法準(zhǔn)確獲取目標(biāo)的相對距離和角度信息,從而降低航天器相對導(dǎo)航精度,影響編隊飛行。本文提出一種基于全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS)差分定位數(shù)據(jù)的星載相對測量設(shè)備在軌標(biāo)定方法,對影響其在軌標(biāo)定精度的主要誤差項進(jìn)行分析,明確可實現(xiàn)的在軌標(biāo)定精度水平,并結(jié)合在軌數(shù)據(jù)驗證該方法的正確性和有效性。
1 GNSS差分定位技術(shù)
隨著GNSS 在航天領(lǐng)域應(yīng)用研究的不斷深入,GNSS接收機在應(yīng)用靈活性、系統(tǒng)精度、體積、重量、功耗及成本等方面的優(yōu)勢日益被各國所重視,并被廣泛應(yīng)用于航天器的導(dǎo)航和測控設(shè)備中。一般情況下,美國全球定位系統(tǒng)(GPS)的單點定位精度約為10 m,我國北斗衛(wèi)星導(dǎo)航系統(tǒng)的單點定位精度可達(dá)5 m。單點定位精度顯然無法滿足航天器的高精度定位需求[4],因此GNSS差分定位技術(shù)應(yīng)運而生。
GNSS差分定位是指兩航天器利用GNSS接收機同步跟蹤、接收導(dǎo)航衛(wèi)星信號,采集測量數(shù)據(jù),通過航天器間鏈路進(jìn)行數(shù)據(jù)交換或者將數(shù)據(jù)同步傳輸至地面,進(jìn)行數(shù)據(jù)差分處理,降低測量數(shù)據(jù)誤差,提高定位精度。GNSS差分定位技術(shù)使定位精度提高了1~2個數(shù)量級[4-5],并具有處理方法簡單等優(yōu)點,因此得到了廣泛應(yīng)用并且發(fā)展迅速。
GNSS差分定位可以采用位置差分、偽距差分和載波相位差分三種方法[4,6]。與位置差分定位和偽距差分定位相比,載波相位差分定位精度更高,可達(dá)厘米量級甚至毫米量級[4,6-8],能夠滿足星載相對測量設(shè)備在軌標(biāo)定的需求。
2 在軌標(biāo)定方法
2.1 坐標(biāo)系與測量數(shù)據(jù)定義
通常情況下,星載相對測量設(shè)備的測量坐標(biāo)系建立在探測器上,基準(zhǔn)坐標(biāo)系建立在安裝平面上。通過地面高精度測量,可獲取兩個坐標(biāo)系的相對關(guān)系,將測量數(shù)據(jù)由測量坐標(biāo)系轉(zhuǎn)換至基準(zhǔn)坐標(biāo)系。
在軌應(yīng)用時,需根據(jù)相對測量設(shè)備在衛(wèi)星上的安裝位置矩陣和衛(wèi)星姿態(tài)測量數(shù)據(jù),將測量數(shù)據(jù)由設(shè)備基準(zhǔn)坐標(biāo)系轉(zhuǎn)換至衛(wèi)星本體坐標(biāo)系和軌道坐標(biāo)系。
目標(biāo)測量數(shù)據(jù)一般采用極坐標(biāo)形式表示,轉(zhuǎn)換時先進(jìn)行俯仰向轉(zhuǎn)換,再進(jìn)行方位向轉(zhuǎn)換。目標(biāo)測量數(shù)據(jù)在測量設(shè)備基準(zhǔn)坐標(biāo)系oclxclyclzcl中的定義如圖1所示。其中,xcl軸指向衛(wèi)星飛行方向,ycl軸指向衛(wèi)星軌道法線反方向,zcl軸根據(jù)右手法則確定,t為待測目標(biāo),t′為目標(biāo)在oclxclzcl平面上的投影,Lcl,t為目標(biāo)測量相對距離,θcl,t為目標(biāo)測量俯仰角,ψcl,t為目標(biāo)測量方位角。

圖1 目標(biāo)相對測量數(shù)據(jù)在設(shè)備基準(zhǔn)坐標(biāo)系中的定義
2.2 相對測量矢量與GNSS差分定位關(guān)系分析
A 星對B星進(jìn)行相對測量,A 星對B星的相對測量矢量與GNSS 差分定位的關(guān)系如圖2所示。
(2) 為規(guī)避卡機事故,在類似復(fù)雜地質(zhì)條件下的隧洞掘進(jìn)中,尤其是在高寒缺氧、大埋深、大斷層、長隧洞TBM施工中,需做到“短進(jìn)尺、強支護(hù)”,采用先進(jìn)的超前物探方法,超前預(yù)報,時刻監(jiān)測圍巖變化情況,超前支護(hù)。
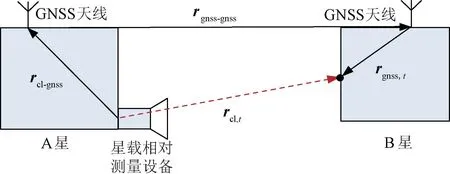
圖2 相對測量矢量與GNSS差分定位的關(guān)系
圖2中:rcl,t為兩星相對測量矢量,由A 星相對測量設(shè)備的基準(zhǔn)坐標(biāo)系原點指向B 星朝向A 星的側(cè)面形心;rcl-gnss為A 星GNSS天線安裝位置矢量,由A 星的相對測量設(shè)備基準(zhǔn)坐標(biāo)系原點指向A 星GNSS接收天線相位中心;rgnss,t為B星GNSS天線安裝位置矢量,由B星GNSS接收天線相位中心指向B星側(cè)面形心;rgnss-gnss為兩星GNSS天線間的相對位置矢量,由A 星GNSS接收天線相位中心指向B 星GNSS接收天線相位中心。
兩星相對測量矢量rcl,t可表示為
式中:xcl,ycl,zcl分別為相對測量矢量rcl,t在A星相對測量設(shè)備基準(zhǔn)坐標(biāo)系中的三個坐標(biāo)分量。
進(jìn)行差分定位時,先根據(jù)GNSS數(shù)據(jù)分別確定兩星GNSS天線絕對位置,再采用差分定位技術(shù)確定兩星GNSS 天線間的高精度相對位置矢量rgnss-gnss,因此rgnss-gnss又稱為GNSS 差分定位矢量。兩星GNSS 天線安裝位置矢量rcl-gnss,rgnss,t可通過地面高精度測量獲取。
綜上,兩星的相對測量矢量rcl,t可表示為
2.3 坐標(biāo)系統(tǒng)一
式(2)中的四個矢量分別定義在不同坐標(biāo)系下,需將其統(tǒng)一轉(zhuǎn)換至軌道坐標(biāo)系。轉(zhuǎn)換方程為
式中:Aab-o為A 星本體坐標(biāo)系相對于軌道坐標(biāo)系的轉(zhuǎn)移矩陣;Acl-ab為A 星相對測量設(shè)備基準(zhǔn)坐標(biāo)系相對于A 星本體坐標(biāo)系的轉(zhuǎn)移矩陣;Abb-o為B星本體坐標(biāo)系相對于軌道坐標(biāo)系的轉(zhuǎn)移矩陣。
2.4 在軌標(biāo)定
式中:(·)-1表示矩陣求逆運算。
由式(4)可知:等式左側(cè)的Δrcl,t為待標(biāo)定的相對測量誤差矢量;等式右側(cè)為轉(zhuǎn)換至軌道坐標(biāo)系的兩星GNSS差分定位矢量、包含姿態(tài)信息的兩星GNSS天線安裝位置矢量及兩星的相對測量矢量,這些參數(shù)均為已知量。通過采集多組數(shù)據(jù)求均值的方法實現(xiàn)相對測量誤差矢量標(biāo)定。相對測量誤差矢量計算公式為
式中:n為數(shù)據(jù)采集數(shù);(·)i表示第i次數(shù)據(jù)采集。
3 在軌標(biāo)定精度分析
GNSS 差分定位矢量、含姿態(tài)信息的兩星GNSS天線安裝位置矢量及兩星的相對測量矢量數(shù)據(jù)均存在一定誤差,這會影響A 星相對測量誤差的標(biāo)定精度。對式(3)進(jìn)行一階展開,可得到
其中
式中:δ1為兩星GNSS差分定位誤差引起的在軌標(biāo)定誤差矢量;Δrgnss-gnss為軌道坐標(biāo)系下兩星GNSS差分定位誤差矢量;δ2為兩星GNSS天線安裝位置誤差引起的在軌標(biāo)定誤差矢量;Δrcl-gnss為A 星本體坐標(biāo)系下GNSS天線安裝位置誤差矢量;Δrgnss,t為B星本體坐標(biāo)系下GNSS天線安裝位置誤差矢量;δ3為A 星姿態(tài)誤差引起的在軌標(biāo)定誤差矢量;ΔAab-o為A 星姿態(tài)誤差矢量;E為單位矩陣;δ4為B星姿態(tài)誤差引起的在軌標(biāo)定誤差矢量;ΔAbb-o為B星姿態(tài)誤差矢量;δ5為A星相對測量設(shè)備和本體坐標(biāo)系基準(zhǔn)誤差引起的在軌標(biāo)定誤差矢量;ΔAcl-ab為A 星相對測量設(shè)備和本體坐標(biāo)系基準(zhǔn)誤差矢量。
通過對誤差項的方向性進(jìn)行分析,可以得到以下結(jié)論。
影響星載相對測量設(shè)備距離測量值標(biāo)定精度的主要誤差項為δ1和δ2。采用載波相位差分定位技術(shù)可將δ1控制在厘米量級[4,6-8],同時δ2也可控制在厘米量級。綜上,星載相對測量設(shè)備距離測量值的標(biāo)定精度優(yōu)于5 cm。
影響星載相對測量設(shè)備角度測量值標(biāo)定精度的主要誤差項為δ1~δ5。當(dāng)兩星相距10 km 以上時,可將GNSS差分定位誤差和GNSS天線安裝位置誤差帶來的在軌標(biāo)定角度誤差控制在0.000 1°以內(nèi);采用高精度星敏感器,可實現(xiàn)角秒量級的姿態(tài)測量精度;采用共基準(zhǔn)安裝、精密溫度控制等方法,可將相對測量設(shè)備與星敏感器的基準(zhǔn)角度誤差控制在0.001°以內(nèi)。綜上,星載相對測量設(shè)備角度測量值的標(biāo)定精度優(yōu)于0.002°。
4 在軌標(biāo)定驗證
A 星上的相對測量設(shè)備由測量前端和二維指向機構(gòu)組成,設(shè)備與星敏感器共同安裝于同一塊高穩(wěn)定基板上。在軌使用時,受主動段振動以及在軌重力釋放等因素影響,設(shè)備測量值存在一個常值誤差。同時,太陽光從不同角度照射二維指向機構(gòu),引起機構(gòu)熱變形,導(dǎo)致設(shè)備測量值存在一個和軌道周期相關(guān)的低頻角度誤差。A 星安裝有雙頻雙模GNSS接收機,與同軌安裝有雙頻雙模GNSS接收機的B星開展了在軌標(biāo)定。
在軌標(biāo)定分為常值誤差標(biāo)定和低頻角度誤差標(biāo)定兩步。首先,利用GNSS差分定位數(shù)據(jù)標(biāo)定相對測量設(shè)備的常值誤差。相對測量設(shè)備常值誤差在軌標(biāo)定情況如圖3所示。
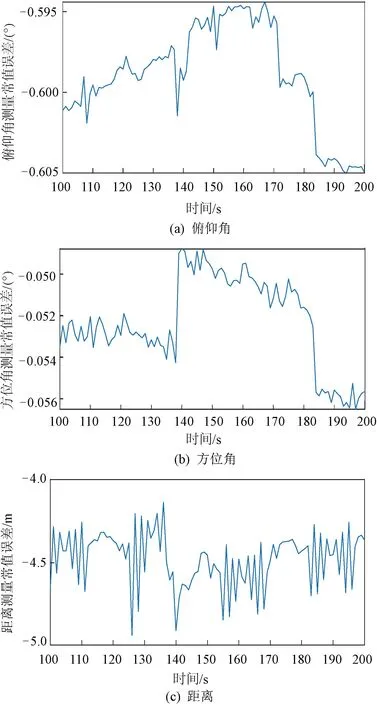
圖3 相對測量設(shè)備常值誤差在軌標(biāo)定情況
由圖3可得,相對測量設(shè)備俯仰角測量常值誤差為-0.600°,方位角測量常值誤差為-0.053°,距離測量常值誤差為-4.5 m。
然后,利用多天多軌數(shù)據(jù)標(biāo)定相對測量設(shè)備的低頻角度誤差。采用10階多項式對多天多軌數(shù)據(jù)進(jìn)行擬合,相對測量設(shè)備低頻角度誤差與面內(nèi)太陽角的關(guān)系曲線如圖4所示。
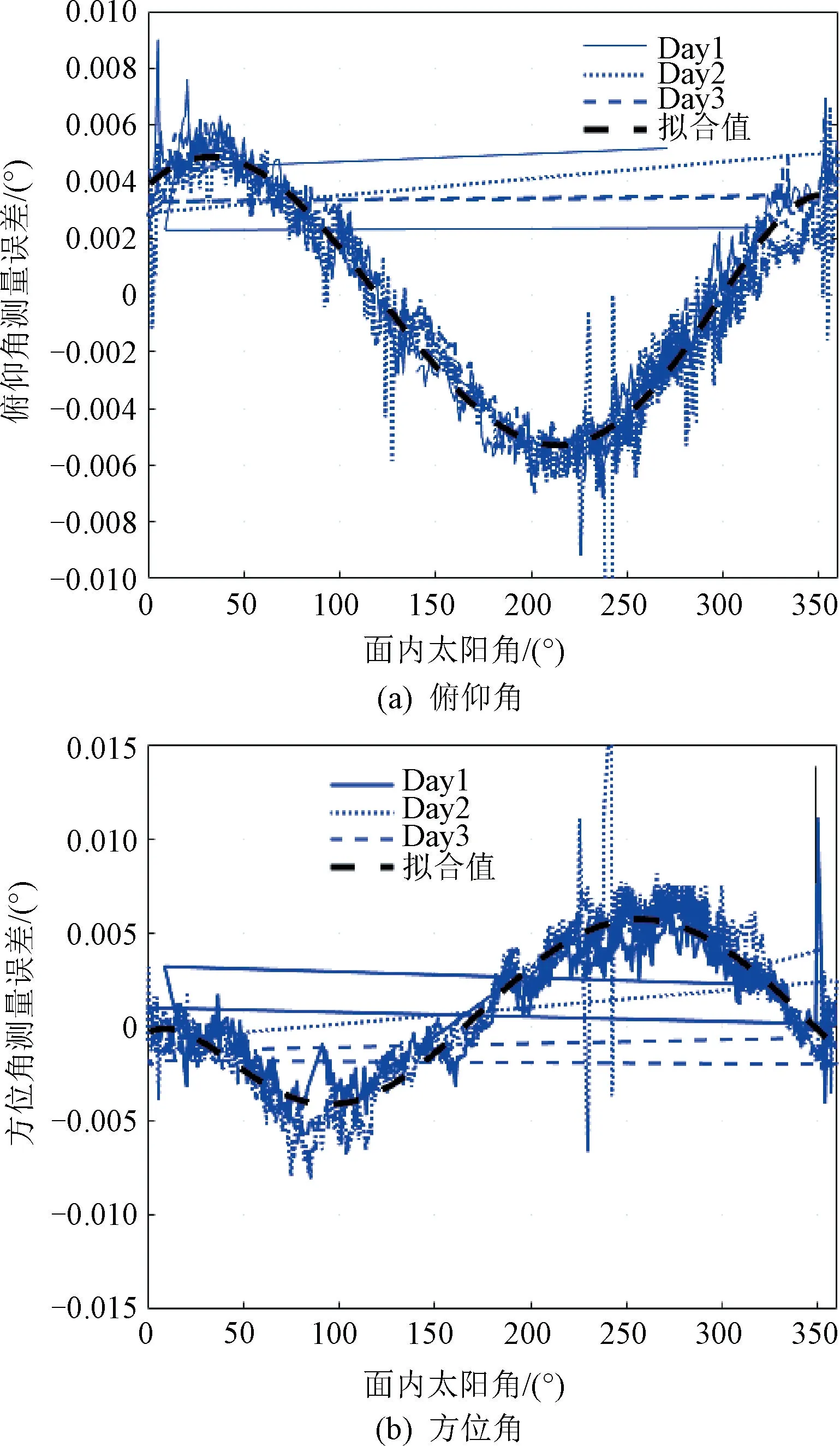
圖4 低頻角度誤差與面內(nèi)太陽角的關(guān)系曲線
由圖4可知,太陽光照引起的低頻角度誤差中,俯仰角測量誤差最大約為0.010°,方位角測量誤差最大約為0.015°。
將擬合曲線與原始測量曲線進(jìn)行比對,統(tǒng)計三倍均方差,評估擬合后的測量誤差。經(jīng)擬合補償后,可以將太陽光照引起的低頻角度誤差控制在0.002°以內(nèi)。
5 結(jié)論
本文提出了一種基于GNSS 差分定位數(shù)據(jù)的星載相對測量設(shè)備在軌標(biāo)定方法。通過分析,明確影響星載相對測量設(shè)備在軌標(biāo)定精度的誤差項主要包括兩星GNSS 差分定位誤差、兩星GNSS天線安裝位置誤差、兩星姿態(tài)誤差、相對測量設(shè)備和本體坐標(biāo)系基準(zhǔn)誤差等。通過對上述誤差項進(jìn)行合理控制,可以將距離標(biāo)定精度控制在5 cm 以內(nèi)、將角度標(biāo)定精度控制在0.002°以內(nèi)。結(jié)合在軌數(shù)據(jù)開展在軌標(biāo)定驗證試驗,驗證了該方法的正確性和有效性。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
經(jīng)濟技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
