考慮風擾的空中機械臂系統力位混合控制
2023-10-13 06:08:46彭定亮郭宇飛李慧子郝志強王志剛
武漢科技大學學報 2023年5期
彭定亮,郭宇飛,李慧子,郝志強,王志剛
(1.武漢科技大學冶金裝備及其控制教育部重點實驗室,湖北 武漢,430081;2.中國艦船研究設計中心,湖北 武漢,430064)
空中機械臂系統主要由旋翼無人機和作業機械臂構成,通常應用于基礎設備檢測[1-2]、工程輔助[3-4]、生活服務[5-7]等領域。在實施相關作業時,機械臂系統會與外部環境發生物理接觸,因此需對其接觸力和位置進行精確、有效的控制。機械臂系統與外部環境的物理交互方式可分為準靜態接觸和動態接觸[8]。當機械臂系統相對所接觸環境或物體幾乎靜止時為準靜態接觸,如物體的抓取[9]和擺放[10],當機械臂系統與所接觸環境或物體存在相對運動時為動態接觸,如橋梁探傷[1]。
當前,與空中機械臂系統力位控制相關的研究大多針對機械臂系統與外界環境的準靜態接觸。如Fumagalli等[11]將阻抗控制方法[12]應用于空中機械臂系統的接觸式作業控制,借助分級控制結構,將整個系統分為環境系統、無人機系統和機械臂系統等3個子系統并分別設計控制器,研究結果表明,使用該方法既能保證空中機械臂系統的自由飛行穩定性,也能保證其在作業過程中具有較理想的平穩特性。Forte 等[13]利用阻抗控制方法,將空中機械臂系統分為橫向、縱向及機械臂等3個控制閉環并分別設計控制策略,同樣獲得了較好的控制效果。相比之下,與空中機械臂系統動態控制相關的研究較少。孟祥冬等[14]針對空中機械臂系統的動態控制,設計了力位混合控制框架,將整個系統分為2個閉環子系統并對子系統分別進行接觸力控制和位置控制,在保證空中機械臂系統平穩移動的同時也能有效控制其接觸力。不過,需要指出的是,在已有的研究報道中,無論空中機械臂系統進行準靜態接觸或動態接觸作業,均未考慮不確定風擾因素對機械臂系統整體作業的影響,代波等[15]和Escareo 等[16]涉及風擾因素的研究也僅針對空中機械臂系統中的旋翼無人機部分。為了提升空中機械臂系統在不確定風擾下實施接觸作業的控制精度、控制效率和穩定性,本文采用力位混合控制框架[17],將空中機械臂整體系統作業空間分為2個正交子空間并借助比例-微分(PD)加接觸力前饋控制方法以及一種固定時間收斂的快速終端滑模控制(FTSMC)方法分別進行接觸力控制和位置控制,通過仿真模擬,與采用一般滑模控制(SMC)方法的空中機械臂力位混合控制器[14]控制效果進行對比,以期為風擾條件下的空中機械臂系統力位混合控制研究提供參考。
1 空中作業無人機的動力學模型
1.1 風擾模型
自然風具有突發性、持續性、周期性和不確定性等多種特點,模擬難度極大。粗略建立隨機模型來模擬自然風,其風速v由基本風速v1、漸變風速v2和隨機風速v3組成[18]。3種風速分別為:
v1=a
(1)
(2)
v3=c·rand(-1,1)sin(2πt+α)
(3)
式(1)~式(3)中,a∈;b∈,t0、t1、t2為時間間隔;c∈,rand(-1,1)為-1到1的隨機數。則自然風風速v為:
v=v1+v2+v3
(4)
根據伯努利流體方程,標準風壓Pw為:
(5)
式中,r為空氣重度,其值為0.01225 kN/m3。
空中機械臂系統在實際風力干擾下的工況極其復雜,此處忽略風擾因素對機械臂控制的影響,僅考慮無人機x,y方向上的二維風,則風擾作用在無人機x、y方向上產生的力Fx和Fy以及力矩Mx和My分別為:
(6)
(7)
式(6)~式(7)中,S為無人機的受風面積,φ和θ分別為無人機環繞x、y軸時的偏轉角。此時擾動力矩陣為:
τext=[FxFy0MxMy0 0 0]T
(8)
1.2 風擾下的動力學模型

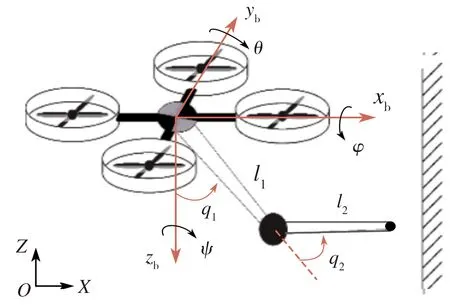
圖1 空中機械臂系統示意圖
(9)
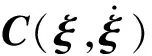
式中,τ表示系統的驅動力矩,JT表示雅克比矩陣的轉置,F表示外界作用于機械臂末端的力,τp表示位置控制系統的驅動力矩,τf表示力控制系統的驅動力矩。本文在考慮風擾對空中機械臂系統控制的影響時,將自然風以擾動力矩陣(式(8))的形式耦合到系統的動力學模型(式(9))中,即風擾因素通過力和力矩作用于系統,這種處理雖然忽略了自然風對機械臂控制的擾動,但因無人機與機械臂之間存在耦合,風擾因素仍會間接影響機械臂的控制。
2 力位混合控制框架
2.1 力位混合控制方案

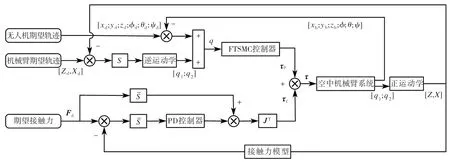
圖2 力位混合控制框架
在對空中機械臂系統進行力位混合控制的過程中,欲使系統按照期望的軌跡并獲得相應的末端力,需將機械臂部分的關節角位置與工作中的直角坐標相互轉換。圖3所示為機體坐標系下的機械臂結構圖,機械臂在該坐標系下的位置(z1,x1)可表示為:
圖3 機體坐標系下的機械臂結構
(10)
又有:
(11)
(12)
(13)
由此可得:
(14)
2.2 力控制器設計
機械臂系統力控制采用傳統的PD加接觸力前饋控制方法。根據胡克定律,機械臂系統與外部環境接觸時的測量力F為:
(15)
式中,K為環境剛度。基于圖3,可以求出該機械臂的雅克比矩陣J為:
(16)
將機械臂末端所受實際力F與相應期望力Fd進行比較,從而實現力的閉環控制。借助機械臂轉置雅可比矩陣JT,可將機械臂工作空間中的力轉化為各關節上的驅動力。故驅動力力矩τf=JTF。
2.3 位置控制器設計
2.3.1 固定時間收斂系統
引理1[21]考慮一類非線性系統:
(17)
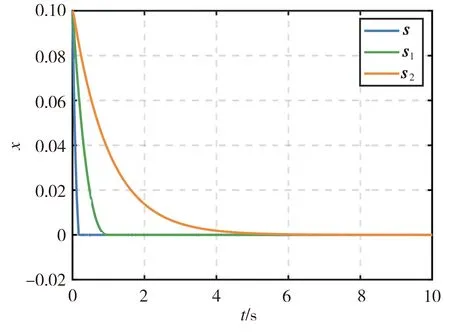
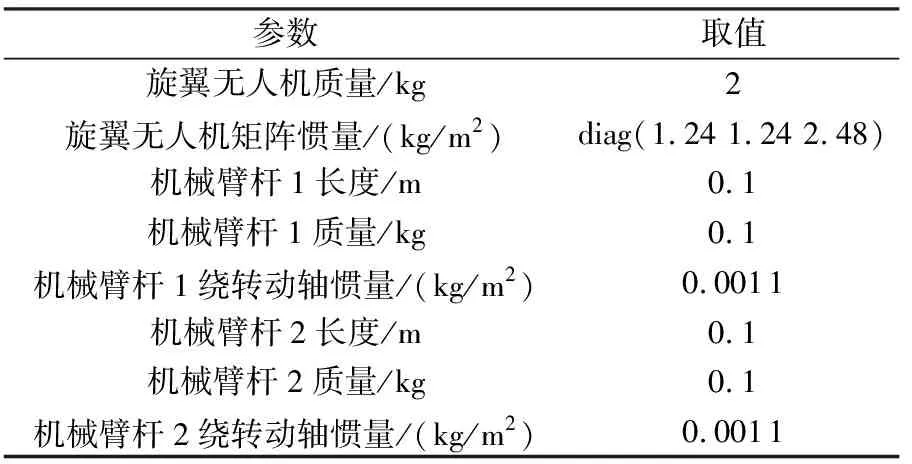
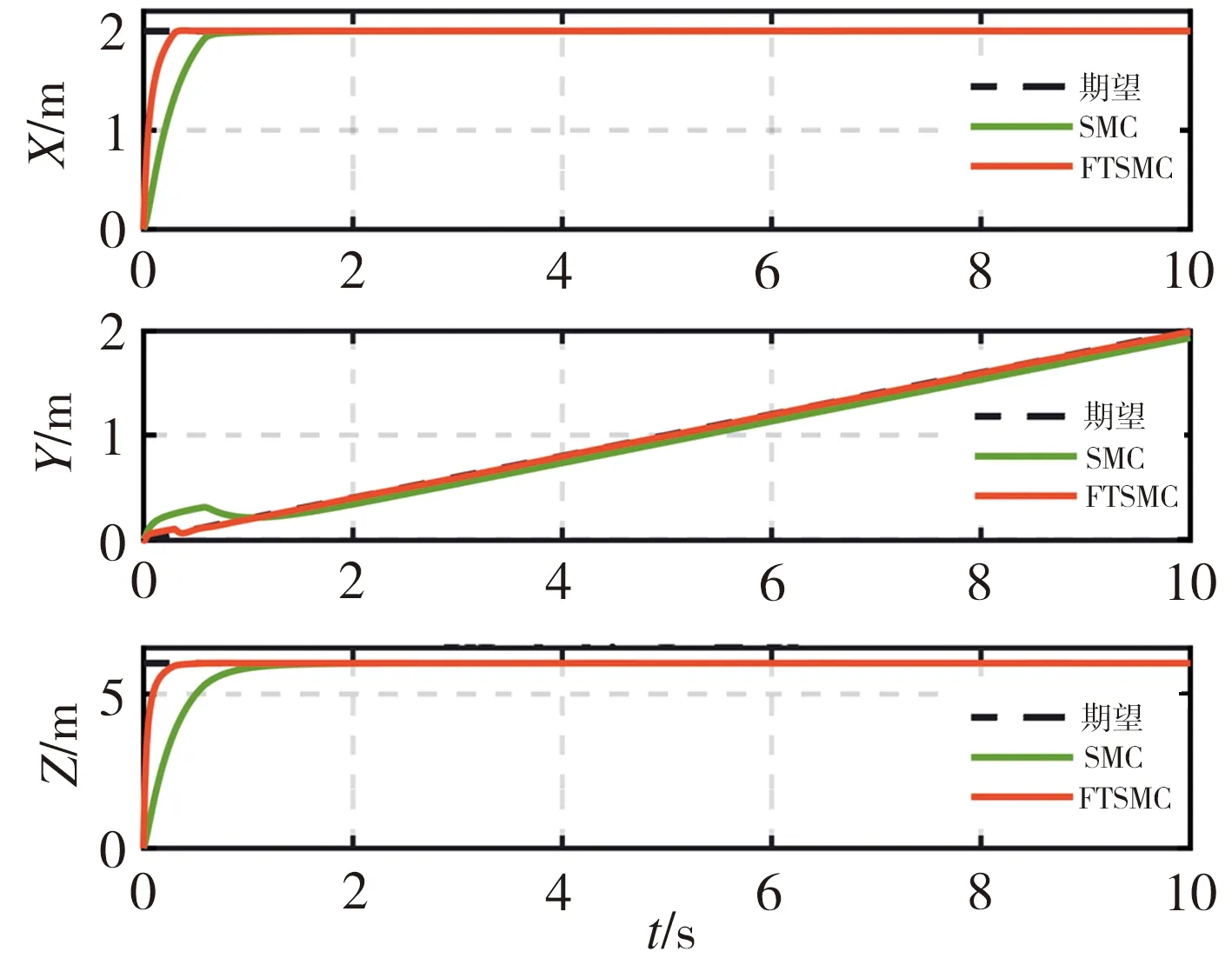
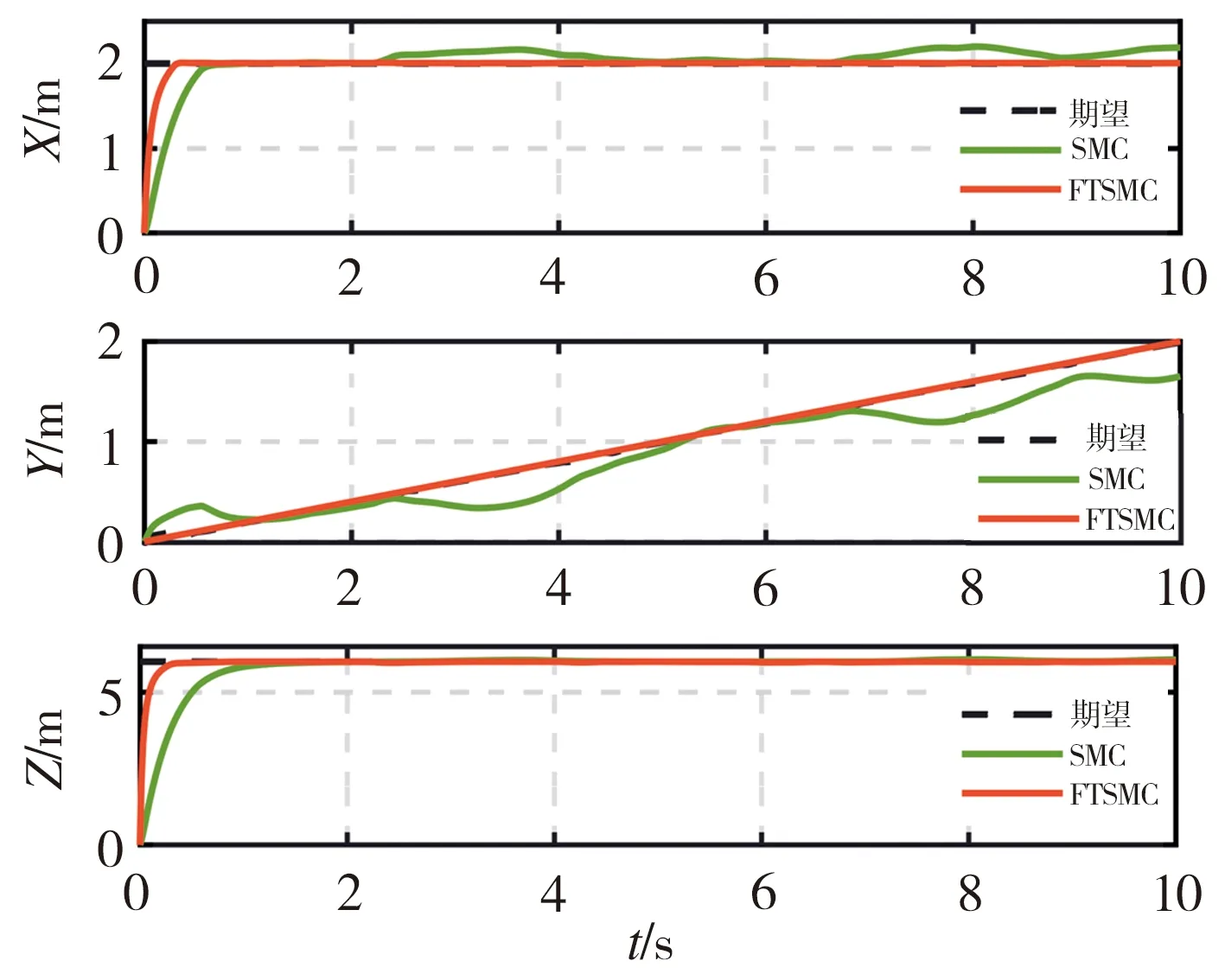
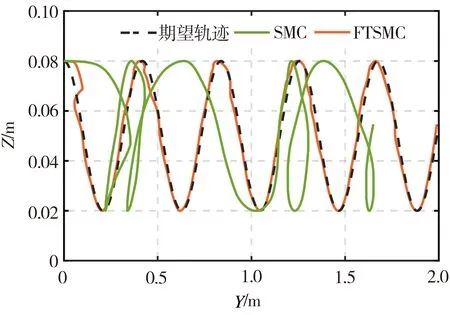
式中,signa1y=|y|a1sign(y),b1>0,b2>0,a1>1,0 (18) 該式中的控制系統收斂時間上界Tmax可通過選擇不同的參數a1、a2、b1、b2來確定,并不需要依賴系統初始狀態。Zuo等[22]根據這種非線性系統設計的固定時間收斂的滑模控制方法取得了良好的應用效果,但在收斂的速度上還有進一步改善的空間。姚來鵬等[23]設計了一種固定時間收斂的終端滑模控制器并應用于彈藥傳輸機械臂中,其研究結果表明,該方法對不確定干擾具有強魯棒性,能夠對外界擾動下的彈藥傳輸機械臂進行準確定位控制。 2.3.2 基于固定時間的快速終端滑模控制器設計 (19) s=e2+Asignk1(e1)+Bsignk2(e1) (20) 式中,A、B為對稱矩陣,k1>1,0 -α1sign(s)α2|s|β1sign(s)-α3|s|β2sign(s)] (21) 式中,α1、α2、α3均大于0,0<β1<1,β2>1。通過分析可知,式(20)滑模面具有收斂特性。當系統狀態距平衡點較遠時,Asignk1(e1)起主導作用,保證系統快速收斂;當系統接近平衡點時,Bsignk2(e1)起主導作用,保證系統在固定時間內穩定,使系統在整個過程中保持較快的收斂速度。 基于引理1給出的固定時間Ts,對式(9)所示的系統動力學方程采用式(20)所示的滑模面以及式(21)所示的控制律,則系統誤差在固定時間內收斂至平衡點,收斂時間T滿足: T (22) Bk2diag(|e1|k2-1)e2] =sT[-α1sign(s)-α2|s|β1sign(s)- α3|s|β2sign(s)] ≤sT[-α1|s|-α2|s|β1-α3|s|β2] ≤-α2|s|β1+1-α3|s|β2+1 (23) (24) 由上分析證明可知,系統狀態可從任意位置到達滑模面s→0。然后沿著滑模面做趨近運動至平衡點的一個極小鄰域內震蕩,理想的滑動模態滿足: (25) 考慮Lyapunov函數為: (26) 對其求導得: (27) 系統狀態在固定時間t2內收斂,即: (28) 綜合可得,收斂時間為:T=t1+t2≤Tmax=T1+T2。 對本研究采用非奇異固定時間終端滑模面的優越性進行驗證。選取一般滑模面s1和傳統非奇異終端滑模面s2進行仿真對比。一般滑模面為: s1=σ1e1+e2 (29) 式中,σ1∈。傳統終端滑模面為: s2=σ2e1+σ3signr(e2) (30) 式中,σ2、σ3、r∈。為了便于對仿真結果進行對比,相關參數的取值依次為:σ1=σ2=σ3=1;A=diag([1 1 1 1 1 1 1 1]);k1=3/5;B=diag([20 20 20 20 20 20 20 20]);k2=5/3。則本研究所采用的具有固定時間收斂的快速終端滑模面可表示為: s=e2+Asignk1(e1)+Bsignk2(e1) (31) 選用不同的滑模面,分別在初始狀態x(0)為0.1和10時進行仿真模擬,結果如圖4所示。由圖4可見,無論系統初始狀態是在平衡點附近還是遠離平衡點處,與采用滑模面s1和s2相比,采用固定時間收斂的快速終端滑模面s明顯提高了系統狀態的收斂速度,該仿真結果充分證實了采用滑模面s的優越性。 (a)x(0)=0.1 表1 空中機械臂系統主要參數 不考慮外界干擾即τext→0。此時,將位置控制系統中期望位置與實際位置的差值作為反饋信號。根據圖1所示的空中機械臂系統結構及仿真設定的期望值可知,對空中機械臂系統進行位置控制時,要求在旋翼無人機向 軸方向移動的同時,由機械臂末端來完成軌跡跟蹤和接觸力控制。圖5和圖6所示分別為無外界干擾條件下無人機的位置、姿態以及機械臂末端軌跡的仿真模擬結果。通過分析圖5中無人機在X、Y、Z方向上的位置和姿態角變化可知,采用FTSMC方法對空中機械臂系統進行位置控制時,無論在控制精度還是響應速度上均較采用SMC方法時有明顯提高,并且圖6的仿真結果同時表明,所采用的FTSMC方法在機械臂末端軌跡跟蹤方面也有更好的表現。 (a)位置變化 在對空中機械臂系統進行接觸力控制時,選擇PD控制器和接觸力前饋控制來實施對期望力的控制,該控制器將實際接觸力與相應期望力的差值作為反饋信號。雖然位置控制系統和力控制系統分開控制,但整個空中機械臂系統是耦合關系,相互會產生影響。無外界干擾條件下,機械臂系統接觸力控制的仿真模擬結果如圖7所示。由圖7可見,隨著系統位置控制精度的提升以及響應時間的延長,系統接觸力的控制效果也相應提高。 對式(4)所描述的隨機自然風進行模擬,結果如圖8所示。 在風擾條件下,分別采用FTSMC控制器和SMC控制器對空中機械臂系統進行位置控制,旋翼無人機的位置、姿態以及機械臂末端軌跡的仿真模擬結果分別如圖9和圖10所示。由圖9和圖10可見,無論對于無人機的運動軌跡還是機械臂末端執行器的運動軌跡,采用FTSMC控制器在控制精度和響應速度上均比采用SMC控制器時有明顯提升,并且采用FTSMC控制器對外界風擾的抗干擾能力也更強。 (a)位置變化 圖10 風擾下的機械臂末端軌跡 (1)應用力位混合控制框架將機械臂系統位置控制和接觸力控制分解成相互正交的兩部分,并分別借助傳統的PD加接觸力前饋控制和FTSMC進行接觸力控制和位置控制。 (2)應用力位混合控制器能夠有效抑制風擾的影響,在風擾下實現了對空中機械臂系統的力及位置進行同時控制。 (3)與SMC控制器相比,FTSMC控制器在控制速度/控制精度和抗干擾能力等方面均有明顯提升,具有良好的魯棒性。


3 機械臂系統力位混合控制仿真分析

3.1 不考慮外界干擾時的仿真結果
3.2 考慮外界風擾的仿真結果
4 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58電腦報(2020年35期)2020-09-17 13:25:53當代工人(2020年8期)2020-05-25 09:07:38裝備制造技術(2019年12期)2019-12-25 03:06:46電腦報(2019年40期)2019-09-10 07:22:44中國洗滌用品工業(2019年4期)2019-05-11 09:27:34小溪流(畫刊)(2017年12期)2018-01-10 16:07:29家庭影院技術(2017年9期)2017-09-26 03:41:45
