基于可穿戴式慣性傳感器的帕金森病患者運(yùn)動(dòng)功能自動(dòng)量化研究
2023-10-19 08:14:50孫奕榮哲汪豐徐暢鄭慧芬
中國(guó)醫(yī)療設(shè)備 2023年10期
孫奕,榮哲,汪豐,徐暢,鄭慧芬
1.江蘇衛(wèi)生健康職業(yè)學(xué)院 全科教研室,江蘇 南京 210029;2.江蘇省老年病醫(yī)院 神經(jīng)內(nèi)科,江蘇 南京 210024;3.東南大學(xué) 生物科學(xué)與醫(yī)學(xué)工程學(xué)院,江蘇 南京 210009
引言
隨著人口老齡化的加劇,帕金森病(Parkinson’s Disease,PD)作為最常見(jiàn)的神經(jīng)變性疾病發(fā)病率逐年上升,據(jù)相關(guān)統(tǒng)計(jì),在中國(guó)已有近400 萬(wàn)患者[1]。PD 主要表現(xiàn)為包括運(yùn)動(dòng)遲緩、靜止性震顫、強(qiáng)直和姿勢(shì)步態(tài)異常為主要特征的運(yùn)動(dòng)癥狀,以及睡眠障礙、認(rèn)知損害、嗅覺(jué)減退等非運(yùn)動(dòng)癥狀[2],PD 的臨床診斷和病情評(píng)估主要憑借患者的運(yùn)動(dòng)癥狀[3-4]。目前,統(tǒng)一帕金森病評(píng)分量表(Unified Parkinson’s Disease Rating Scale,UPDRS)為臨床應(yīng)用最廣泛的量表(下列項(xiàng)目包括17 個(gè)項(xiàng)目,每項(xiàng)的計(jì)分值用0、1、2、3、4、5 級(jí),分值越高表示PD 癥狀越嚴(yán)重)[5],其包括4 個(gè)部分內(nèi)容,涵蓋核心的運(yùn)動(dòng)癥狀和非運(yùn)動(dòng)癥狀評(píng)估,其中第3 部分量表是患者的運(yùn)動(dòng)功能,內(nèi)容較為全面,但是評(píng)價(jià)時(shí)花費(fèi)時(shí)間長(zhǎng),同時(shí)評(píng)價(jià)時(shí)易受到醫(yī)護(hù)人員主觀判斷和自身?xiàng)l件的限制[6]。
隨著機(jī)器學(xué)習(xí)技術(shù)尤其是神經(jīng)網(wǎng)絡(luò)的發(fā)展,在對(duì)運(yùn)動(dòng)功能進(jìn)行定量化量表的研究取得一定進(jìn)展,也將人工智能及移動(dòng)技術(shù)加入《中國(guó)帕金森病治療指南(第四版)》[7]中。可穿戴式慣性傳感器能進(jìn)行時(shí)域、頻域分析,獲得如躺、坐、站、走和跑等運(yùn)動(dòng)特征,對(duì)如步頻、步幅、軀干傾角、起立-行走計(jì)時(shí)測(cè)試時(shí)間、運(yùn)動(dòng)對(duì)稱性、協(xié)調(diào)性等PD 患者特征性的運(yùn)動(dòng)參量進(jìn)行實(shí)時(shí)、更精準(zhǔn)、更可靠的檢測(cè)和定量分析,是PD 患者理想的運(yùn)動(dòng)癥狀評(píng)估手段[8-11]。本研究旨在采用可穿戴式慣性傳感器采集的多類別運(yùn)動(dòng)數(shù)據(jù),探究進(jìn)行UPDRS 運(yùn)動(dòng)相關(guān)指標(biāo)自動(dòng)評(píng)分的方法。
1 資料與方法
1.1 臨床資料
選取2020 年5 月至2021 年12 月在江蘇省老年病醫(yī)院神經(jīng)內(nèi)科就診的PD 患者作為研究對(duì)象。納入標(biāo)準(zhǔn):① 年齡50~90 歲;② 符合2015 年國(guó)際運(yùn)動(dòng)障礙學(xué)會(huì)原發(fā)性PD 診斷標(biāo)準(zhǔn);③主訴行走中存在凍結(jié)步態(tài)。排除標(biāo)準(zhǔn):① 無(wú)獨(dú)立行走和站立能力的患者;② 因骨關(guān)節(jié)及神經(jīng)肌肉疾病、外傷等原因影響行走狀態(tài);③ 有嚴(yán)重認(rèn)知功能障礙和/或明顯精神癥狀,具體標(biāo)準(zhǔn)為精神狀態(tài)檢查量表(Mini-Mental State Examination,MMSE)評(píng)分<22 分;④ 嚴(yán)重視力和聽(tīng)力受損無(wú)法配合的患者。共采集有效數(shù)據(jù)110 例,其中男性64 例、女性46 例,年齡61~83 歲,平均年齡(73.35±6.29)歲。正常對(duì)照組為患者家屬或護(hù)工(正常對(duì)照組的納入是為了數(shù)據(jù)集管理工具進(jìn)行自動(dòng)化數(shù)據(jù)的導(dǎo)出和數(shù)據(jù)集構(gòu)建)。所有患者家屬和護(hù)工均規(guī)范簽署知情同意書。
1.2 方法
1.2.1 臨床資料收集
收集所有患者和正常對(duì)照者的性別、年齡、病程等資料,并進(jìn)行MMSE評(píng)分、Hoehn-Yahr(H-Y)分級(jí)(H-Y分級(jí)是為了了解帕金森患者疾病的嚴(yán)重程度。本實(shí)驗(yàn)采用1~4級(jí)的患者,5級(jí)患者無(wú)法完成本實(shí)驗(yàn))、UPDRS評(píng)分。
1.2.2 范式動(dòng)作
參考UPDRS 量表第3 部分運(yùn)動(dòng)癥狀評(píng)估內(nèi)容,范式動(dòng)作依次為:靜坐動(dòng)作、手臂連續(xù)前旋后旋動(dòng)作、反復(fù)抬腿動(dòng)作、睜眼和閉眼靜止站立動(dòng)作、10 m 折返擺臂行走以及二重任務(wù)的10 m 折返擺臂行走。
1.2.3 運(yùn)動(dòng)采集設(shè)備及數(shù)據(jù)采集
本研究采用東南大學(xué)蘇州醫(yī)療器械研究院開(kāi)發(fā)的可穿戴慣性傳感器系統(tǒng)進(jìn)行運(yùn)動(dòng)數(shù)據(jù)采集,系統(tǒng)由8 個(gè)可穿戴傳感器節(jié)點(diǎn)及上位機(jī)軟件構(gòu)成,全面覆蓋受試者運(yùn)動(dòng)過(guò)程中四肢、軀干的姿態(tài)情況[12]。8 個(gè)傳感器的分布情況如圖1 所示。
如圖2 所示,可穿戴傳感器包含慣性傳感器模塊、微控制單元(Microcontroller Unit,MCU)模塊、電池管理模塊、報(bào)警模塊和存儲(chǔ)模塊共5 個(gè)模塊。MCU 模塊主要負(fù)責(zé)藍(lán)牙通訊、數(shù)據(jù)處理以及通訊處理,傳感器模塊用來(lái)實(shí)現(xiàn)運(yùn)動(dòng)信號(hào)的檢測(cè),SD 卡用作數(shù)據(jù)備份,電池管理模塊用于電池充放電保護(hù),報(bào)警模塊用來(lái)進(jìn)行低電量預(yù)警以及通訊狀態(tài)顯示。MCU 模塊采用nRF52840 芯片,支持藍(lán)牙Mesh 無(wú)線組網(wǎng)協(xié)議棧和藍(lán)牙5.0 無(wú)線通信協(xié)議,通過(guò)IIC 接口與傳感器模塊進(jìn)行通信,通過(guò)串行外圍接口(Serial Peripheral Interface,SPI)與存儲(chǔ)模塊進(jìn)行通信,通過(guò)兩個(gè)通用輸入輸出端口(General Purpose I/O Ports,GPIO)來(lái)連接報(bào)警模塊;傳感器模塊采用MPU6050 為核心的慣性傳感單元,獲取三軸加速度、三軸角速度、姿態(tài)角信息,用于檢測(cè)人體運(yùn)動(dòng)姿態(tài)信息并使用IIC 協(xié)議與主控芯片進(jìn)行通信。慣性傳感單元的采樣頻率為100 Hz,加速度量程±16 g,角速度量程±2000°/s;存儲(chǔ)模塊選用32 G 存儲(chǔ)卡,滿足1 周時(shí)間長(zhǎng)度的數(shù)據(jù)存儲(chǔ);電源管理模塊選擇TP4057 芯片,在保證可穿戴設(shè)備安全性要求的同時(shí)最多可供傳感器連續(xù)工作18 h,滿足日常醫(yī)院使用場(chǎng)景下的需求。
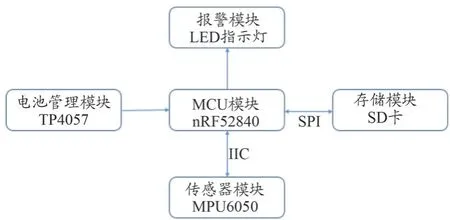
圖2 系統(tǒng)結(jié)構(gòu)框圖
上位機(jī)軟件主要用于接收各個(gè)運(yùn)動(dòng)傳感器的數(shù)據(jù)并進(jìn)行儲(chǔ)存、管理和顯示操作。傳感器采集的數(shù)據(jù)以內(nèi)部格式存儲(chǔ)為記錄文件,包含采樣時(shí)間戳和8 個(gè)傳感器每個(gè)的三軸加速度、角速度、姿態(tài)角信號(hào)。根據(jù)受試者注冊(cè)信息進(jìn)行實(shí)驗(yàn)數(shù)據(jù)的儲(chǔ)存和建立索引,以方便之后的運(yùn)動(dòng)指標(biāo)分析。本研究采用一種基于SQLite 數(shù)據(jù)庫(kù)的記錄管理和數(shù)據(jù)集構(gòu)建工具,使用4 個(gè)數(shù)據(jù)表進(jìn)行管理記錄并使用SQL 內(nèi)聯(lián)受試者動(dòng)作事件表查詢功能進(jìn)行批量導(dǎo)出患者注冊(cè)信息表、評(píng)分表、數(shù)據(jù)記錄表(圖3)。

圖3 上位機(jī)軟件的受試者檔案創(chuàng)建(a)和實(shí)驗(yàn)操作面板(b)
1.2.4 數(shù)據(jù)預(yù)處理
針對(duì)平穩(wěn)動(dòng)作數(shù)據(jù)預(yù)處理采用巴特沃斯(Butterworth)低通濾波器進(jìn)行頻域?yàn)V波,設(shè)置濾波器階數(shù)為8 階,截止頻率16 Hz,主成分分析法對(duì)三軸加速度的三通道信號(hào)做處理去除冗余的坐標(biāo)軸信號(hào),針對(duì)重復(fù)性動(dòng)作,采用改進(jìn)的加權(quán)滑動(dòng)平均濾波器:Savitzky-Golay 濾波器進(jìn)行去噪處理,針對(duì)腳面快速著地造成的無(wú)效尖峰信號(hào),采用基于長(zhǎng)度變換的尖峰捕獲-插值重建方法,并進(jìn)行坐標(biāo)軸的動(dòng)態(tài)校準(zhǔn)。
1.2.5 運(yùn)動(dòng)特征參數(shù)提取
對(duì)于震顫和平衡性,著眼于時(shí)域的均方根、頻域的功率譜、信號(hào)熵值等特征參數(shù),提取的特征參數(shù)通過(guò)基于箱型圖的統(tǒng)計(jì)學(xué)驗(yàn)證。針對(duì)長(zhǎng)時(shí)間動(dòng)作信號(hào)在特征參數(shù)提取后的信息丟失問(wèn)題,利用信號(hào)分段和分段信號(hào)的特征參數(shù)序列組合作為最終的輸入?yún)?shù)向量。各范式動(dòng)作具體特征性參數(shù)如表1 所示。
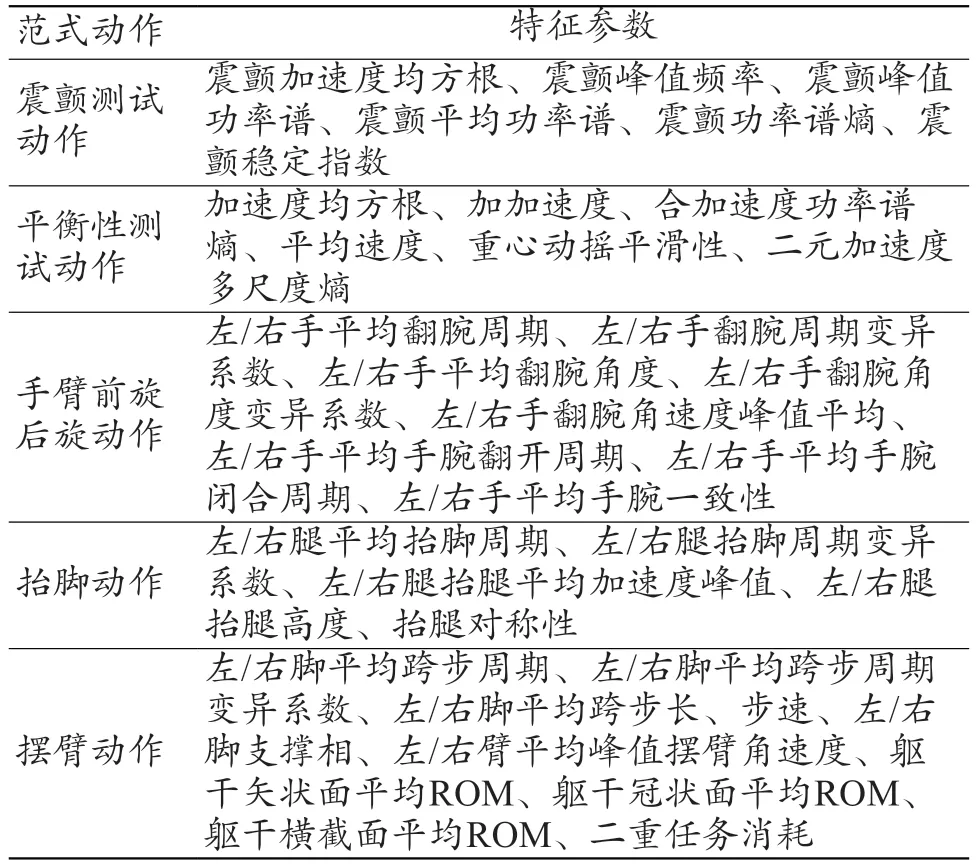
表1 各范式動(dòng)作的特征參數(shù)
1.2.6 自動(dòng)評(píng)分模型的建立與驗(yàn)證
采用支持向量機(jī)(Support Vector Machine,SVM)作為自動(dòng)評(píng)分的核心分類器,引入松弛參數(shù)ε 和懲罰系數(shù)C,構(gòu)成SVM 的軟間隔模型[13]。在自動(dòng)評(píng)分模型的構(gòu)建中,震顫(靜坐)采用分段信號(hào)的序列參數(shù)作為輸入;平衡性(睜眼、閉眼靜止站立)采用整體信號(hào)的特征參數(shù)差異作為輸入;對(duì)于重復(fù)性動(dòng)作,在應(yīng)用模型前先對(duì)特征參數(shù)進(jìn)行特征篩選,獲取對(duì)UPDRS 評(píng)分具有較高相關(guān)性的特征參數(shù),再作為輸入向量進(jìn)行模型訓(xùn)練,并對(duì)部分參數(shù)使用主成分分析方法(Principal Component Analysis,PCA)自動(dòng)降維進(jìn)行優(yōu)化,輸出對(duì)應(yīng)的UPDRS 評(píng)分,最后使用k 折交叉驗(yàn)證,將預(yù)測(cè)得分與臨床醫(yī)生的評(píng)分相對(duì)比,檢驗(yàn)一致性。
2 結(jié)果
2.1 震顫自動(dòng)評(píng)分結(jié)果
由圖4 和表2 可知,考慮到UPDRS 評(píng)分為4 分的患者無(wú)法完成動(dòng)作,因此4 分樣本不予考慮,此外震顫測(cè)試動(dòng)作的3 分評(píng)分項(xiàng)目樣本量較少,因此在之后的研究中震顫關(guān)聯(lián)的UPDRS 評(píng)分項(xiàng)目?jī)H關(guān)注評(píng)分為0~2 分的入組患者。SVM 自動(dòng)評(píng)分模型混淆矩陣包括準(zhǔn)確度、精確度、召回率及F1 值在內(nèi)的分類評(píng)價(jià)指標(biāo),優(yōu)化后的最終準(zhǔn)確度達(dá)到0.87。
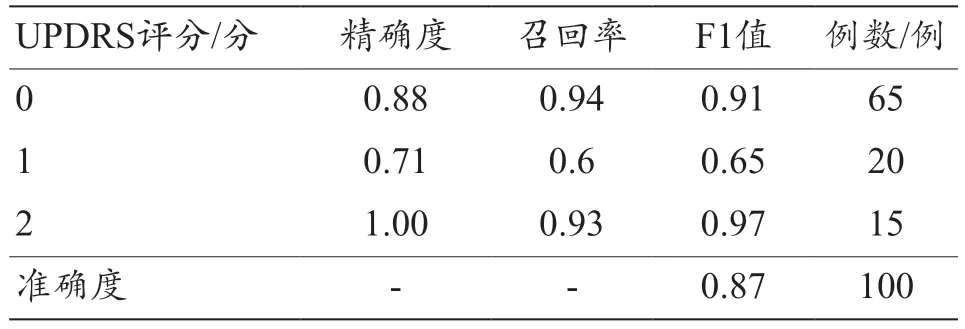
表2 震顫自動(dòng)評(píng)分模型整體信號(hào)特征參數(shù)序列作為輸入時(shí)的分類評(píng)價(jià)指標(biāo)
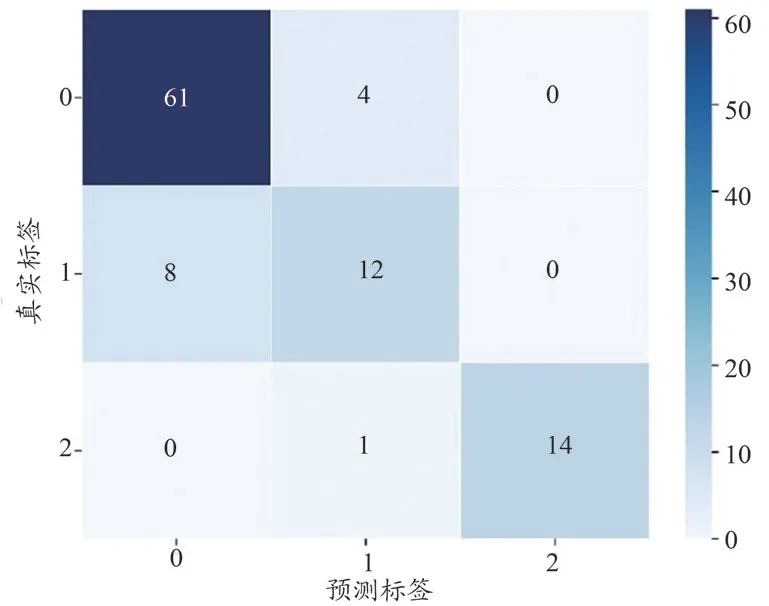
圖4 震顫自動(dòng)評(píng)分模型整體信號(hào)的特征參數(shù)作為輸入時(shí)的混淆矩陣
2.2 平衡性自動(dòng)評(píng)分結(jié)果
如圖5 和表3 所示,睜眼和閉眼靜止站立動(dòng)作整體信號(hào)的特征參數(shù)差異作為輸入,將睜眼和閉眼靜止站立動(dòng)作的4 個(gè)特征參數(shù)的差異值作為維度為4 的輸入?yún)?shù)向量,取得最優(yōu)準(zhǔn)確度時(shí)的混淆矩陣和分量評(píng)價(jià)指標(biāo)。最后準(zhǔn)確度達(dá)0.90。
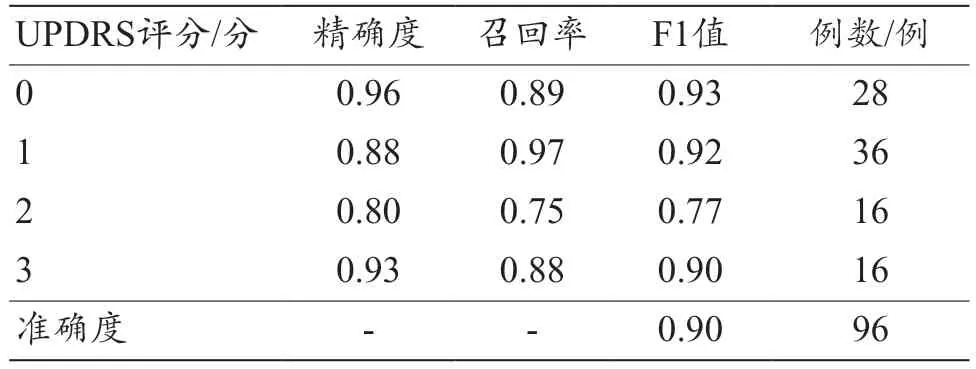
表3 睜眼和閉眼靜止站立動(dòng)作整體信號(hào)的特征參數(shù)差異作為輸入時(shí)的分類評(píng)價(jià)指標(biāo)
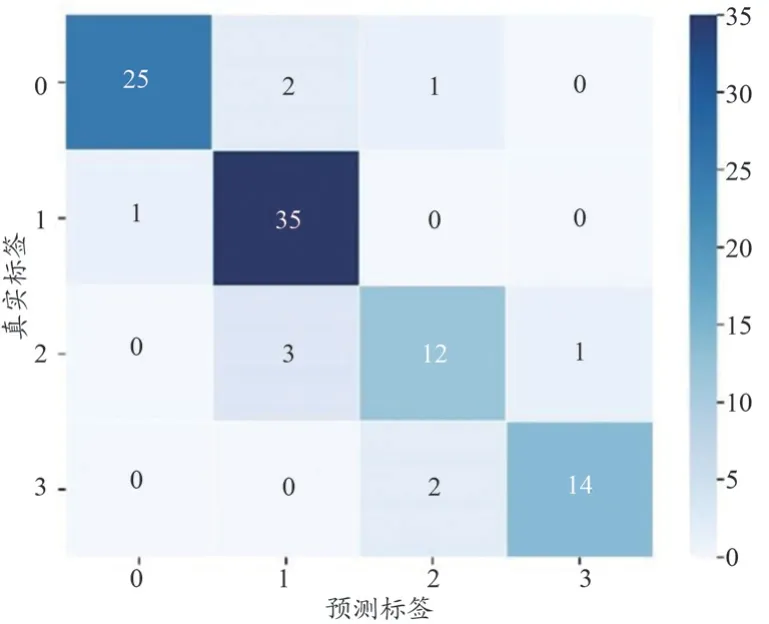
圖5 睜眼和閉眼靜止站立動(dòng)作整體信號(hào)的特征參數(shù)差異作為輸入時(shí)的混淆矩陣
2.3 重復(fù)性自動(dòng)評(píng)分結(jié)果
如圖6 和表4 所示,對(duì)于上肢靈活性,選取翻腕平均周期、翻腕周期變異系數(shù)、平均手腕翻開(kāi)周期、平均手腕閉合周期、平均翻腕角度、翻腕角速度峰值平均這6 個(gè)特征參數(shù)作為輸入向量,最終得到了最高0.83 的準(zhǔn)確度。如圖7 和表5 所示,對(duì)于下肢靈活性測(cè)試,選取抬腿平均加速度峰值、抬腿平均高度、平均抬腿周期、抬腿周期變異系數(shù)作為輸入向量,最終取得了0.81 的最優(yōu)準(zhǔn)確度。如圖8 和表6 所示,對(duì)于步態(tài)測(cè)試,本研究文選取左/右腳平均跨步周期、左/右腳平均跨步長(zhǎng)、步速、左/右腳支撐相、左/右臂平均峰值擺臂角速度、軀干橫截面平均活動(dòng)度作為輸入向量,得到的最優(yōu)準(zhǔn)確度為0.74。使用PCA 方法自動(dòng)降維進(jìn)行優(yōu)化,最后在取得13 維度輸入時(shí)最優(yōu)準(zhǔn)確度增加到0.78。
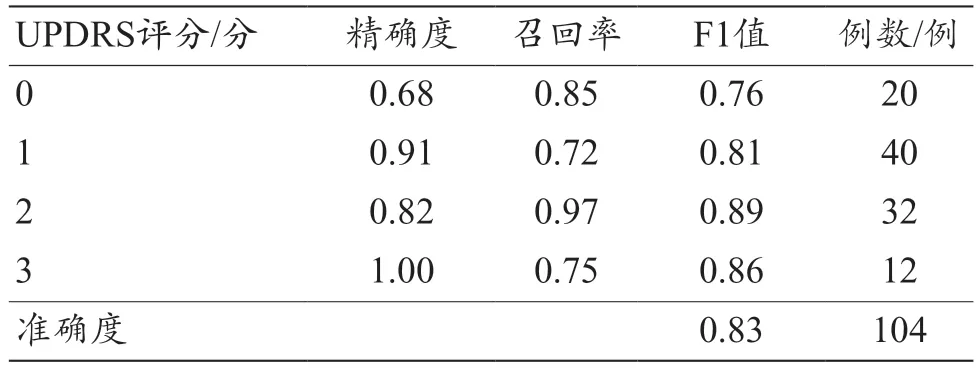
表4 上肢靈活性評(píng)分預(yù)測(cè)分類評(píng)價(jià)指標(biāo)
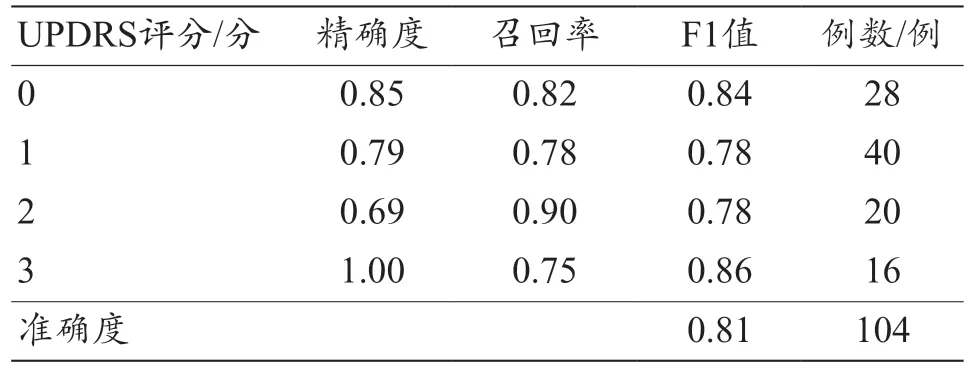
表5 下肢靈活性評(píng)分預(yù)測(cè)的分類評(píng)價(jià)指標(biāo)
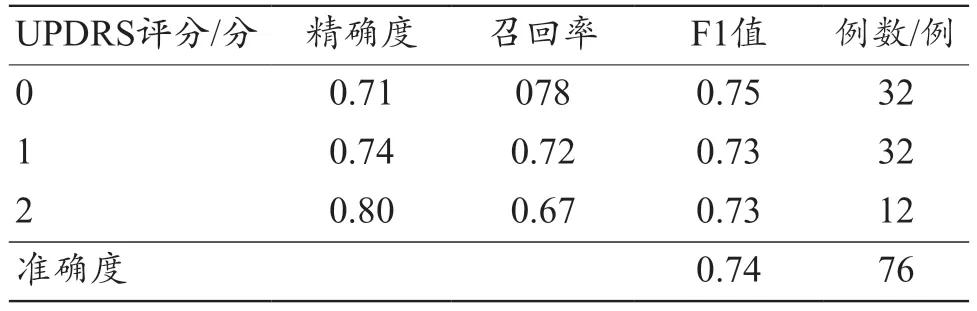
表6 步態(tài)評(píng)分預(yù)測(cè)的分類評(píng)價(jià)指標(biāo)
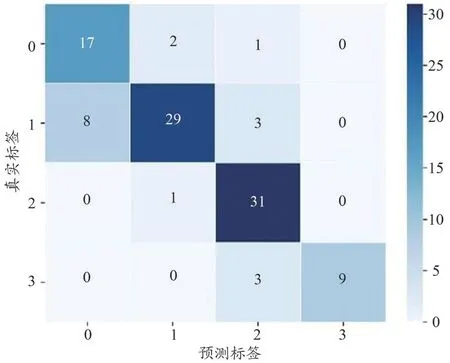
圖6 上肢靈活性評(píng)分預(yù)測(cè)的混淆矩陣
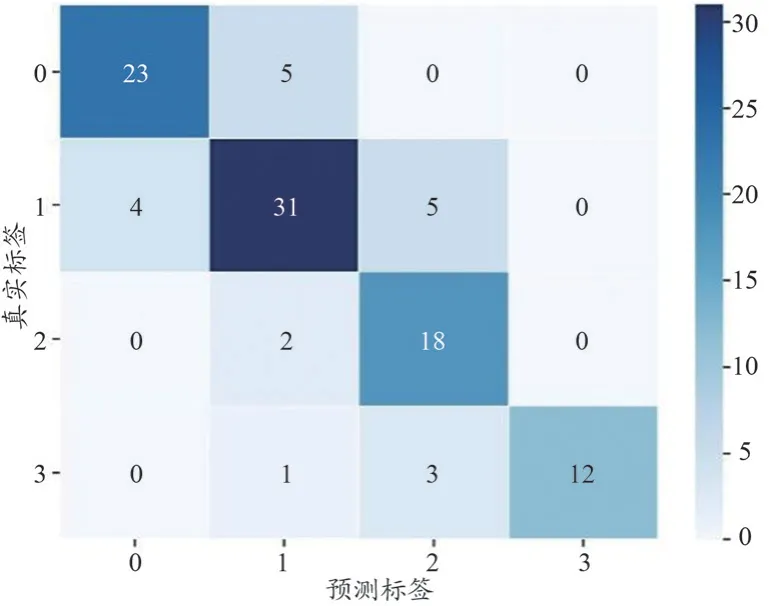
圖7 下肢靈活性評(píng)分預(yù)測(cè)的混淆矩陣
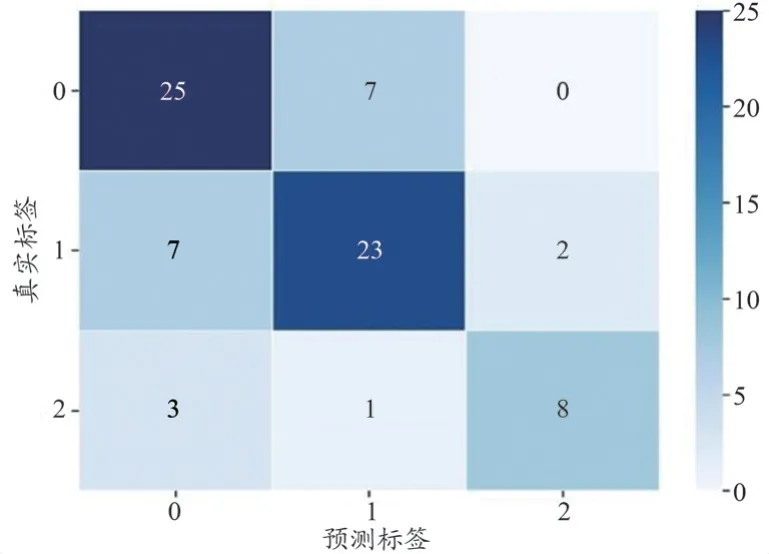
圖8 步態(tài)評(píng)分預(yù)測(cè)的混淆矩陣
3 討論
可穿戴設(shè)備是近年來(lái)備受關(guān)注的新型個(gè)體化醫(yī)療的有效方法,能對(duì)患者進(jìn)行全面有效的評(píng)估,尤其適用于需要長(zhǎng)期疾病監(jiān)測(cè)和治療的PD 患者[14]。利用可穿戴式慣性傳感器采集的運(yùn)動(dòng)數(shù)據(jù)進(jìn)行PD 患者運(yùn)動(dòng)癥狀自動(dòng)評(píng)分系統(tǒng)的研究,可有效避免量表評(píng)估的主觀性,使結(jié)果更準(zhǔn)確、更客觀,進(jìn)而可以系統(tǒng)地、動(dòng)態(tài)地監(jiān)測(cè)疾病的進(jìn)程[15-16]。Garza-Rodriguez 等[17]利用一種可被手握緊的旋轉(zhuǎn)角度傳感器,研究手臂前旋后旋的8 個(gè)生理學(xué)參數(shù)作為評(píng)估指標(biāo),證明這些參數(shù)的顯著性和區(qū)分性。何娟娟等[18]針對(duì)PD 患者運(yùn)動(dòng)遲緩這一運(yùn)動(dòng)癥狀,從反復(fù)翻腕、反復(fù)踮腳、起坐測(cè)試等測(cè)動(dòng)作入手,使用神經(jīng)網(wǎng)絡(luò)多層感知機(jī)算法對(duì)患者和正常對(duì)照者進(jìn)行分類,同時(shí)使用梯度提升迭代決策樹(shù)算法對(duì)癥狀進(jìn)行量化評(píng)分,最終判斷準(zhǔn)確度達(dá)97%,量化評(píng)分準(zhǔn)確度達(dá)到84%。這些方法能針對(duì)特定的PD 運(yùn)動(dòng)功能表征動(dòng)作提取出具有區(qū)分度的運(yùn)動(dòng)學(xué)參數(shù),但是不能對(duì)運(yùn)動(dòng)功能進(jìn)行綜合評(píng)價(jià),限制了其在臨床的應(yīng)用。林志榕[19]利用可穿戴設(shè)備采集手部運(yùn)動(dòng)信息,并基于運(yùn)動(dòng)傳感器數(shù)據(jù)提取與震顫和運(yùn)動(dòng)遲緩癥狀嚴(yán)重程度相關(guān)的特征參數(shù)。算法驗(yàn)證試驗(yàn)結(jié)果表明,SVM 分類模型具有最高的分類精度,其研究顯示對(duì)震顫和運(yùn)動(dòng)遲緩癥狀的嚴(yán)重程度分類準(zhǔn)確度較高,與本研究結(jié)果一致,但其主要利用的是佩戴于患者手腕的設(shè)備,通過(guò)手部的范式動(dòng)作進(jìn)行評(píng)估,結(jié)果也存在一定的局限性,研究使用8 個(gè)傳感器,希望能夠盡可能全面地覆蓋受試者運(yùn)動(dòng)過(guò)程中四肢、軀干的姿態(tài)情況。
本研究從臨床UPDRS 評(píng)估量表入手,針對(duì)典型運(yùn)動(dòng)癥狀設(shè)計(jì)多維度范式動(dòng)作,并與UPDRS 量表運(yùn)動(dòng)評(píng)分內(nèi)容建立對(duì)應(yīng)關(guān)系。利用可穿戴式慣性傳感器采集收集到的PD 患者和健康對(duì)照者的數(shù)據(jù),基于SQLite 數(shù)據(jù)庫(kù),開(kāi)發(fā)一款自動(dòng)導(dǎo)出、自動(dòng)管理的患者信息、評(píng)分與運(yùn)動(dòng)信號(hào)管理工具,用于后續(xù)自動(dòng)評(píng)分模型的訓(xùn)練。針對(duì)平穩(wěn)動(dòng)作的數(shù)據(jù)處理,提取其震顫和平衡性的運(yùn)動(dòng)特征參數(shù),并提出分段化信號(hào)處理的思路,得到特征參數(shù)序列并探索特征參數(shù)序列的組合方式,以彌補(bǔ)長(zhǎng)時(shí)間信號(hào)在提取特征時(shí)產(chǎn)生的信息丟失。運(yùn)動(dòng)特征參數(shù)選取了包括了震顫測(cè)試動(dòng)作的6 個(gè)特征參數(shù)和平衡性測(cè)試動(dòng)作的6 個(gè)特征參數(shù)。與吳浩然[20]研究不同的是,本實(shí)驗(yàn)未泛化地對(duì)所有傳感器的所有信號(hào)通道使用采集算法,而是有針對(duì)性地對(duì)范式動(dòng)作的感興趣部位的傳感器進(jìn)行通道預(yù)處理。
在算法上,本研究使用粒子群優(yōu)化算法(Particle Swarm Optimization,PSO)以訓(xùn)練樣本集的準(zhǔn)確度為優(yōu)化條件,對(duì)SVM 的超參數(shù)調(diào)節(jié)[21]。最終建立基于PSO超參數(shù)優(yōu)化的SVM 自動(dòng)評(píng)分模型,同時(shí)本研究進(jìn)行了震顫和步態(tài)的分析。使用分段參數(shù)序列組合作為輸入,在震顫測(cè)試中獲得了最優(yōu)準(zhǔn)確度0.90,在平衡性測(cè)試中取得最優(yōu)準(zhǔn)確度0.87。針對(duì)重復(fù)性動(dòng)作,提取了其上肢靈活性測(cè)試、下肢靈活性測(cè)試和步態(tài)測(cè)試的若干特征參數(shù)。考慮到特征參數(shù)較多,應(yīng)用特征工程進(jìn)行特征篩選和PCA 降維。最后應(yīng)用基于PSO 超參數(shù)優(yōu)化的SVM自動(dòng)評(píng)分模型,上肢靈活性測(cè)試、下肢靈活性測(cè)試分別可以達(dá)到0.83 和0.81 的準(zhǔn)確度。步態(tài)測(cè)試直接使用PCA 降維方法得到的最優(yōu)準(zhǔn)確度是0.78。在震顫、平衡性、肢體靈活性方面均顯示與臨床量表評(píng)估有較好的相關(guān)性。
4 結(jié)論
本研究提出了一種基于可穿戴慣性傳感器的PD運(yùn)動(dòng)功能自動(dòng)量化系統(tǒng),用于評(píng)估PD 人和健康人的UPDRS 運(yùn)動(dòng)量表動(dòng)作,同時(shí)對(duì)傳感器數(shù)據(jù)進(jìn)行處理并從震顫、平衡、規(guī)律性動(dòng)作和步態(tài)4 個(gè)角度出發(fā)分別提取運(yùn)動(dòng)特征參數(shù),應(yīng)用PSO-SVM 模型區(qū)分帕金森患者和健康人,本研究模型在準(zhǔn)確度、精確度、召回率和F1分?jǐn)?shù)均較高。表明,本研究提出的PD 運(yùn)動(dòng)功能自動(dòng)量化系統(tǒng)能夠整體評(píng)估患者運(yùn)動(dòng)功能,給臨床工作帶來(lái)便捷的同時(shí),在一定程度上有助于提高診斷的精準(zhǔn)性,在臨床上有很好的應(yīng)用價(jià)值。
猜你喜歡
動(dòng)漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文周刊·小學(xué)一年級(jí)版(2016年28期)2017-06-03 00:28:49
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00