固態激光雷達輸電線路實時建模及壓縮技術
2023-10-24 01:37:46李繼輝廖云杰王鴻飛楊生蘭
激光與紅外 2023年9期
關鍵詞:模型
李繼輝,廖云杰,鄔 劍,王鴻飛,劉 瑋,楊生蘭
(國網四川省電力公司超高壓分公司,四川 成都 610036)
1 引 言
輸電線路是電網的重要組成部分,也是維持國計民生的重要基礎設施。國家電網部門需要定期對輸電線路進行巡檢以消除各種安全隱患[1]。傳統的人工巡檢方式效率低下、操作危險、工人勞動強度大。近年來,基于激光雷達的自動化巡檢方式逐漸代替人工巡檢[2]。輸電線路巡檢主要包括以下方面:電路危險距離判斷[3]、導線弧垂及風偏角測量[4]、輸電走廊三維可視化[5-6]等。而輸電線路三維重建技術是上述應用的基礎,因此,開發一種高精度輸電線路實時建模技術具有重要的研究意義。
近年來,三維激光掃描技術不斷發展,相較于傳統建模技術而言,該技術憑借其高速、全面且高自動化的特點,顯示出極大優勢,因此世界各國均在研究基于激光雷達的輸電線路巡檢技術[7-9]。激光雷達按掃描方式主要可以分為兩類:機械激光雷達和固態激光雷達。機械激光雷達的出現早于固態激光雷達,截止目前已有大量基于機械激光雷達的輸電線路三維重建技術方案[10-12],傳統機械激光雷達存在價格高昂、體積較大等缺點,難以普及應用。隨著固態激光雷達技術的發展,低成本、小體積的固態激光雷達逐漸走向市場。機械激光雷達帶有控制激光發射角度的旋轉部件,而固態激光雷達則無需機械旋轉部件,主要依靠電子部件來控制激光發射角度。由于掃描方式的不同,基于機械激光雷達的三維重建方法也無法直接應用于固態激光雷達。以本文采用的livox固態激光雷達為例,其獨特的非重復掃描原理為三維重建帶來了全新的挑戰。
基于固態激光雷達的三維重建可以得到厘米級分辨率的高精度三維模型,而高精度模型必然造成儲存空間的大量占用。
本文中重建的模型為架空輸電線路,是典型的戶外大規模場景,針對此類場景建模得到的點云模型點數通常可達到數十萬甚至百萬級。若直接使用原始數據,必然會對儲存及傳輸造成極大的負擔。因此,本文還提出了一種基于實時時空點云壓縮的模型壓縮方法,可有效減小模型占用。
2 輸電線路實時建模
基于機械激光雷達的三維建模技術已經較為成熟。與機械激光雷達相比,本文采用的livox固態激光雷達具有以下特性:
(1)小視場。livox相較于機械激光雷達視場更小,每一幀點云的特征變得非常少,因此用傳統特征匹配方法容易發生退化,使特征匹配失敗。另外,特征點的減少也使得匹配過程更易受運動目標的影響。
(2)不規則掃描模式。機械式激光雷達采用多個平行的激光接收器,掃描到的點云由許多平行的環組成,這種規則的點云大大簡化了特征提取過程,如圖1所示。Livox固態激光雷達使用少量激光收發組件也能達到多組激光收發器同時掃描的效果。其采用的非重復掃描原理如下:在激光光路上增加2~3組可旋轉的棱鏡,利用光的折射來控制光在現實空間中的掃描區間與位置,同時,這套方案通過精準控制電機轉動模式也能將點云集中分布在感興趣掃描區域(ROI)。基于非重復掃描的特性,激光雷達點云分辨率也會隨著時間積分不斷提升,實現更加稠密的建圖效果。圖2為livox mid-40視場覆蓋率隨時間變化圖。
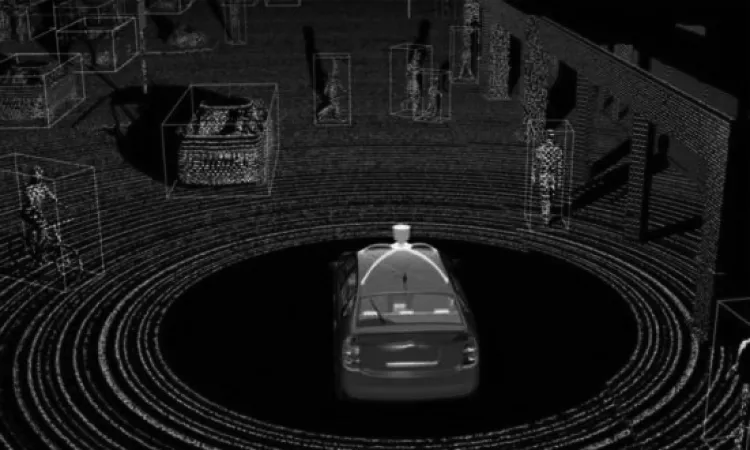
圖1 機械激光雷達點云

圖2 livox mid-40視場覆蓋率隨時間變化
(3)運動模糊。由于采用單個激光頭連續掃描,同一幀點云中各個點的實際采集時間并不完全相同,這種幀內運動會使點云扭曲,導致運動模糊。傳統機械式激光雷達也存在這樣的問題,但機械式激光雷達有多束激光,所以通常不會那么嚴重。
針對以上問題,本文在經典激光SLAM框架的基礎上做了一系列改進,包括小視場提取特征、運動目標濾除、以及運動模糊補償等。具體流程如下文所述。
2.1 優質點選擇
首先定義如下幾個關于點云的物理量:
(1)點云中點的深度為:
(1)
(2)點與點的偏轉角為:
(2)
(3)點云中點的強度為:
I(p)=R/D(p)
(3)
其中,R為點云點的反射率,由激光雷達直接測得,可以看出強度較小代表點云點距離較遠或者所屬物體反射率較低。
(4)入射角定義為激光線與點云點周圍平面的夾角:
(4)
為減少點云數據量,便于后續處理,基于上述指標刪除如下種類的點:
(1)偏轉角大于17°的點。這類點接近雷達視場的邊緣,曲率較大導致特征提取結果可信度降低。
(2)強度過大或過小的點。反射強度不在正常范圍內的點其測量值可能有較大誤差。
(3)入射角接近水平的點。這類點的光斑會被拉成橢圓,不能作為點的信息。
去除上述點后剩下的點成為優質點(good points),特征提取將在優質點中進行。
2.2 特征提取
實現點云匹配需計算點的局部平滑度來提取平面特征或邊線特征。本文提取的特征主要是點到線的殘差和點到面的殘差。
(1)點到線的殘差。令εk表示當前點云幀中的邊線特征,εm表示已構建地圖中的邊線特征。對于εk中的每個點,在εm中搜索它的5個最近鄰點。εk中的點pl在雷達坐標系下,εm中搜索到的點pw在世界坐標系下,將pl投影到pw,有如下變換:
pw=Rkpl+tk
(5)
其中,(Rk,tk)是第k幀中最后一個采樣點的位姿,使用它代表這一幀所有點的位姿,即當前幀所有點都以(Rk,tk)進行坐標變換。
設pi是pw的第i個最近點(i=1,2…,5),計算這5個點的均值μ和協方差矩陣Σ,設Σ中最大特征值為λmax,在其余特征值中任取一個為λ,若λmax>3λ,則認為pi形成了一條直線。關聯點pw到這條線的殘差計算公式如下:
(6)
(2)點到面的殘差。與點線殘差計算方法類似。令Pk表示當前點云幀中所有的邊線特征,Pm表示已構建地圖中的邊線特征。對于Pk中的每個點,在Pm中搜索pw的5個最近鄰點。設pi是pw的第i個最近點(i=1,2,…,5),計算這5個點的均值μ和協方差矩陣Σ,設Σ中最小特征值為λmin,在其余特征值中任取一個為λ,若λmax<3λ,則認為pi形成了一個平面。關聯點pw到這個面的殘差計算公式如下:
(7)
2.3 運動補償
t時刻的幀內點pl在全局地圖中的對應點pw的位姿為:
pw(t)=Rk-1pl+tt
(8)
改進后總體算法流程如圖3。
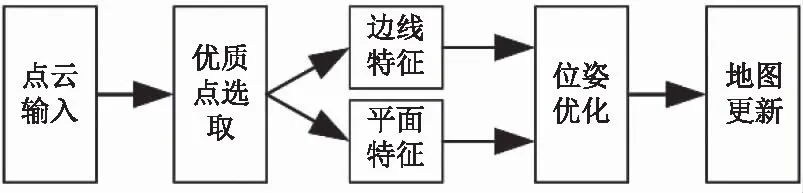
圖3 建模算法流程
3 點云降噪濾波
使用激光雷達原始數據建圖得到的模型會包含較多的噪聲及離群點,不便于后續處理。為得到更加光順的輸電線路三維模型,本文采用基于改進模糊C均值聚類(FCM)的點云去噪算法去除離群點和噪點。FCM是一種算法簡單且相對有效的聚類方法。其算法流程如下文所述。
設包含N個點的點云為P={p1,p2,…,pN},經聚類處理后被分為C類O={o1,o2,…,oC},其中oi為每個類別的聚類中心。優化函數為:
(9)
式中,μjk為pj相對于ok的隸屬度,djk表示pj于ok的歐氏距離。
本文對原始FCM算法進行改進,在對距離djk的定義中加入了權重因子ω,改進后的djk定義為:
(10)
(11)
這樣改進的目的在于,使遠離聚類中心的點的權重更低,而靠近聚類中心的點的權重更高。這樣處理可以提高算法對噪聲的魯棒性。去噪算法流程如下:對于點云中的每個點pj,如果其鄰近點的數量小于設定閾值,則將pj去除;否則,用上述改進FCM算法將pj移向ok。
4 點云模型壓縮
本文采用在點云序列中利用空間和時間冗余的時空壓縮技術。該系統主要有距離圖像轉換、空間編碼和時間編碼三個模塊。圖4給出了編碼過程中的結構圖。
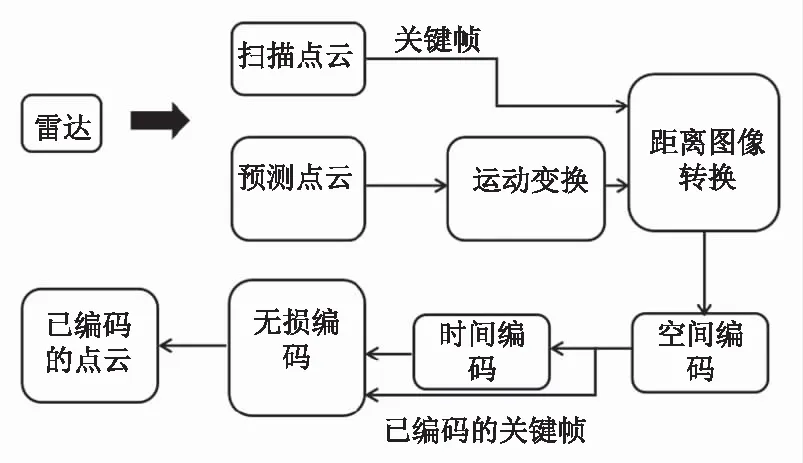
圖4 壓縮系統結構圖
一個連續的點云序列區分了兩種點云類型:一個關鍵幀點云(K-frame)和其他的預測幀點云(P-frame)。首先使用IMU測量值將P-frame轉換到K-frame的坐標系:
(12)

變換后,將三維笛卡爾空間中的點(x,y,z)轉換成距離圖像中的點(θ,φ,r):
(13)
其中,θr和φr分別為激光雷達的水平和垂直分辨率;r為像素值。
然后通過擬合平面對K-frame進行空間編碼,將距離圖像統一劃分為單元塊(例如4×4)。首先對第一個塊的點擬合一個平面,然后擴展到相鄰的塊,最終得到一個大的塊。空間編碼過程水平增長塊,因為現在的激光雷達水平分辨率更高。擬合平面給定點可表述為線性最小二乘問題。
將K-frame中擬合的平面用于對P-frame進行時間編碼,使用一個平面來編碼多個連續的點云的重疊場景,避免在每幀點云中進行平面擬合,提高壓縮效率。
最后,經過時間和空間編碼后,對區域圖像中的大部分塊進行平面編碼;,未被擬合的塊被留在殘余圖中。然后平面和殘余圖被一個無損壓縮方案(例如,霍夫曼編碼)進一步壓縮,生成最終編碼的數據。
5 實驗分析
本文在ubuntu 18.04和ros平臺上實現了輸電線路建模、濾波和壓縮算法。實驗平臺配置為:大疆mainfold2邊緣計算設備,cpu為Intel i7-8550U,8 GB內存,固態激光雷達選擇livox mid-70。
5.1 輸電線路實時建模實驗
實驗場地為四川某地220 kV架空輸電線路使用livox mid-70雷達進行實時建模得到的結果如圖5所示。

圖5 輸電線路建模結果

圖6 模型濾波結果
得到的模型精度為0.05 m,實時建模幀率在10 f/s以上,可滿足實時性要求。
5.2 點云濾波實驗
原始數據得到的模型包含較多噪聲,對其進行濾波處理得到結果如圖。濾波前為5763943個點,濾波后為4938425個點,去除了15 %的噪聲點及離群點。
5.3 點云壓縮實驗
原始數據經過建模和濾波后,為減輕傳輸壓力,需要對其進行數據壓縮。首先將模型pcd文件轉換為bin文件,然后使用本文提出的壓縮算法進行編碼壓縮。壓縮前模型大小為227 MB,壓縮后為43 MB,壓縮率為18.9 %,可大幅減小傳輸帶寬。將壓縮后的模型解碼即可還原為pcd文件,可視化后點云如圖7所示。
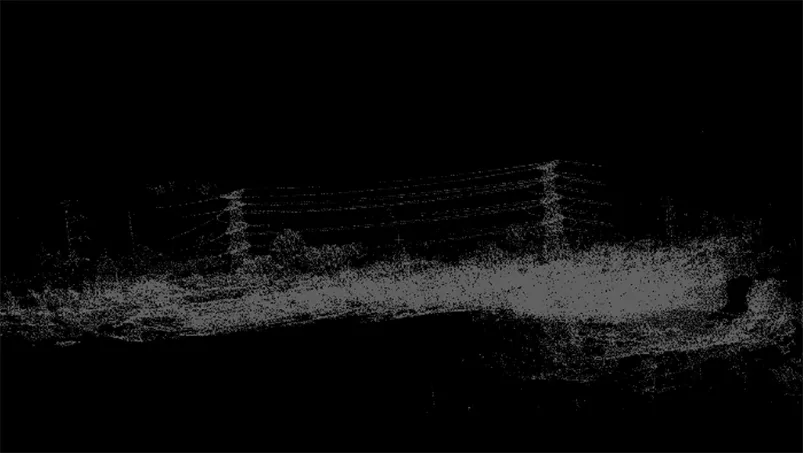
圖7 經過壓縮后的點云模型
壓縮后的模型與原始模型相比,并未損失太多細節。驗證了壓縮算法的有效性
6 結 語
本文針對輸電線路巡檢場景,提出了一種基于固態激光雷達的實時建模、濾波及數據壓縮技術,解決了傳統機械激光雷達成本高昂、難以普及的痛點。實驗分析表明,本文提出的方案可以實現高精度實時建模,有效去除模型噪聲及離群點,在保留模型細節信息的前提下,大幅減少儲存及傳輸空間消耗,有效降低了巡檢工作的成本,提高了其效率及自動化程度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
