一種高速列車矢量控制模型設計與應用
2023-10-24 06:34:10王巧麗張俊霞陳錫文
時代汽車 2023年20期
王巧麗 張俊霞 陳錫文

摘 要:高速列車電源各種參數的要求不斷提高,電力拖動控制方法直接影響整個高速列車的運行安全,本文根據高速列車發動機的拖動特性,設計了用于高速列車電機控制的矢量控制模型,在MATLAB/ULINK環境下進行了仿真分析,仿真結果驗證了本方法的合理性。
關鍵詞:電力拖動 機載發電機 矢量控制 MATLAB/ULINK
1 引言
為了保證高速列車電源穩定性能,優化機載發電機的特性,本文在高速列車的高速電力拖動結構設計的基礎上,對系統的調速控制系統進行了大量的研究。拖動系統主要由計算機、異步電動機、變頻器、增速裝置以及各種交、直流發電機組成,新的電力拖動系統采用交流變頻電機與變頻閉環調速系統對高速列車機載發電機的速度進行控制。對新的模型進行了模擬仿真,結果發現,新的高速列車矢量控制模型能夠改善其動力性能,系統變得更加高效穩定。
2 系統建模
電力拖動系統的異步電動機矢量變換控制系統可實現高性能調速,進行實際的異步電動機控制前需要對電機矢量控制系統進行仿真分析,此處先分析異步電機的仿真模型,優化優化電力拖動系統的轉速,對其磁鏈閉合改進,設計新的PWM調速與控制模型——APWM模型,使用MATLAB仿真驗證新方法的高效、可靠、精確。
已有的文獻資料顯示:異步電力拖動設備具有高階非線性等特點,其模型基本是多輸入、并行處理、多輸出結構,常見的高速列車矢量控制模型屬于強耦合多變量控制系統,電磁矩由磁通和電流相互作用而產生,轉速和磁通產生旋轉電動勢,所以高速列車電力拖動數學模型屬于非線性系統。本文將轉子看成等效轉子,并且確定其子側,折算成等效繞組。三相繞組A、B、C的空間定義三相電流坐標靜止,異步電動機的數學模型有電壓方程、磁鏈、運動方程組、轉矩組等四大部分[1]。
2.1 改進磁鏈矩陣
對角線元素為自感,非對角元素為互感,此處磁鏈矩陣的對角元素等于漏感、電感、矯正因子之和[2],校驗因子為經驗誤差的平均值,式中存在的情況,同時存在選定元素與轉置元素的磁鏈因子相等的情況用于改進磁鏈矩陣的研究,對角元素滿足如公式1和公式2所示的約束,構筑如公式3所示的新的高速列車電力拖動系統磁鏈矩陣,滿足轉置分量的控制值相等,相位差為,磁鏈矩陣的轉置不會改變力矩的合成。
(公式1)
(公式2)
(公式3)
(公式4)
2.2 電壓方程
在前面的改進磁鏈方程基礎上構建三相的繞組電壓平衡方程[3][4],三相轉子組繞歸算到定子側得出電壓降矩陣,存在關系,且滿足式4關系,為對角相位電感,三相電壓通過電感磁通量的調整進行矯正,提高電機輸入電壓的精度,對PWM調制過程中的控制模型的三相輸入電壓進行諧振頻率的實時跟蹤與矯正,提升調速系統的工作效率與響應速度。
(公式5)
式中為輸入的三相電流,三相內阻,為三相電感,得到如下電壓方程。
(公式6)
(公式7)
2.3 轉矩方程設計
前面考慮了測試系統的電磁鏈、電壓方程基本遵循平衡法則,同時引入了校驗因子用于判斷新的電力拖動系統的改進是否可靠,由此確定磁動勢能儲存關系,通過PWM構造新的轉矩方程,提高控制系統的控制精度。
(公式8)
其中,表示磁動勢能,表示連續t秒時間段的電流,表示j元素電感,為平均校驗因子。電磁轉矩依賴電流不變,當機械位移磁場發生變化時偏移角為,結合磁動勢能存儲關系得到如公式8所示的具有多變量、非線性的強耦合主電機轉矩方程,其中為主電機的轉矩,為主電機的轉速,為磁鏈矩陣內元素的電感,三相電的偏移角的等差值為,為相位電感。
(公式9)
2.4 電力拖動系統主電機轉軸運動方程
高速列車測試的電力拖動系統主電機轉軸的轉矩與轉速的關系可以通過電磁轉矩、負載轉矩、與轉速成正比的阻尼系數、機組轉動慣量、扭轉彈性轉矩系數、電機極性對數和校驗因子等因素表達[5~9]。
(公式10)
設計測試電力拖動系統的系統主電機轉軸運動方程,當轉矩和轉速成正比時,且阻尼系數和扭轉彈性力矩系數等于0時,存在如公式10所示的關系,其值與初始轉矩、轉速、相移有關。
(公式11)
2.5 電力拖動系統主電機模型
當電力拖動系統的轉矩負載恒定時,三相異步電機呈現非線性多變量關系。電力拖動系統的三相異步主電機的強耦合、非線性的關系可以從磁鏈、轉矩方程體現,存在定子、轉子之間的強耦合,保證轉矩方程中定子、轉子之間磁場相互影響,用坐標變換手段加以修正,得出電力拖動系統的三相異步交流電機的直流等效模型,可以根據驅動電機的轉矩、相移修正動力系統的三相輸入電壓。
(公式12)
3 系統仿真
3.1 系統模型體系
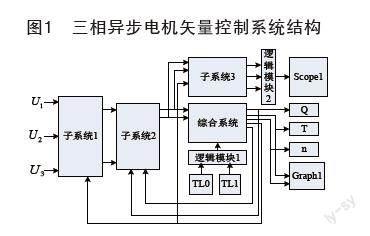
前面已經建立了高速列車電力拖動系統三相異步主電機的系統模型,進行了矢量控制分析,得到三相定子轉子關系,設計如下電流、電壓、磁鏈等價變換坐標模型[10],推導靜止三相坐標,根據三相坐標系確定系統的轉換,獲取轉子磁場方向坐標系。按照列車動力系統的矢量控制方程,采用MATLAB的SIMULINK對三相旋轉異步電機模型進行仿真分析。高速列車電力拖動系統三相異步主電機的仿真結構如圖1所示,系統將對電機、旋轉電機、U/I變換和選擇變換的三相坐標模型進行仿真,通過仿真結果判斷新的控制模型是否有效。
3.2 系統仿真分析
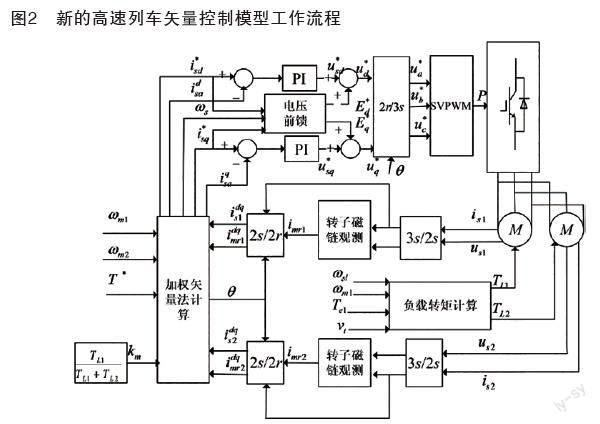
新的高速列車矢量控制模型電壓轉子的磁鏈觀測值,對驅動系統的兩個異步電機進行反電動勢積分控制,根據積分的值獲取電機轉子的磁鏈,勵磁電流Il、負荷電壓Uload、調速頻率Fadj和相移Pmov等變量結合,通過控制系統的運算模塊得到輸入功率、磁通量等信息,從而實現其動力匹配。由于高速列車在運行過程中的加速、減速、制動、動力系統的增加或者減少等動作需要人工干預,司機可以通過控制模塊、手柄產生一個新的控制轉矩,切換系統的工作模式來控制高速列車的牽引系統,新的高速列車矢量控制模型的框架如圖2所示。給定m1和m2兩個電機的轉速信息和,同時給定目標轉矩信息Taim,將轉速信息和目標轉矩信息輸入數據初始化處理模塊,進而獲取兩個驅動電機內部各個轉子的內阻Rm1i、Rm2j、同時根據信息采集系統獲知前5秒電機的輸入電壓、電流的歷史值Uhis5_m1、Uhis5_m2、Ihis5_m1、Ihis5_m1,通過負荷預測算法結合APWM控制模塊的脈寬值,獲知兩個電機的電壓和電流反饋分量和電力負荷分類。新的高速列車矢量控制過程中需要考慮兩個電機內部各個轉子的磁鏈信息,控制模型調用權值矢量算法、電力負荷預測算法,為兩個驅動電機提供最佳的輸入電流和輸入電壓,新的高速列車矢量控制模型能夠實現負載轉矩的實時計算,結合兩個電機的轉子磁鏈觀測實現兩個驅動電機的實時控制,提高兩個驅動電機的工作效率,同時防止高速列車的兩個驅動電機不會因為超負荷而過熱,減少電機因為超負荷過熱的損壞概率。
根據前面的仿真模型結構,此處將驗證該模型的正確性和合理性,選擇仿真三相異步電機的性能參數:三相異步電機的總功率為111Kw,電機的極數為6(三個極數為2的異步電機組合而成),每個異步電機的定子內阻約1.88到1.91歐姆,轉子內阻為1.43到1.50歐姆之間,定子的子感應為198mH,轉子自感=195mH,電機的轉動慣量為0.0071,額定轉速,電機定子互感值為。把前面參數作為仿真模型的輸入集合在MATLAB/SIMULINK下進行仿真分析。
(1)轉動穩定性
在空載情況下啟動異步電機,電機轉動速度穩定,基本保持在1430RPM到1458.9RPM之間,呈現出短時間內工作穩定,長時間內轉速存在偏差,電磁轉矩存在一定的波動,但是波動在允許的范圍內,證明在新的控制方法下三相異步電機轉動穩定、可靠。
(2)滿載電力拖動系統穩定驗證
當三相異步電機滿載運行啟動時,電機輸入電壓為380V、50Hz交流電,電機運行進入穩定狀態,電機基本能夠在1.1秒內進入穩定狀態,轉矩基本不變,說明電機啟動穩定,性能良好,可以完成全壓滿載啟動。(3)新的電力拖動系統分析
電力拖動系統啟動3秒后追加20N·m的負載,在6秒后追加12N·m的負載,10秒后突降16N·m的負載,電機轉速發生了一定的變化,發熱量變化不明顯,電流有所增大,但是負載基本平衡,盡管測試過程中負載有增有減,但是轉速波動、轉矩波動并不明顯。證明本文所設計的電力拖動模型能夠很好的應用于電力拖動系統的電機控制。
4 實驗驗證
課題組2021年12月,多次在某電力機車集團的實驗場地對CHR2019T-II系列動車進行測試,被測試的動車有10節車廂,每節車廂有座位100個,空車廂的重量為189201Kg,長為2412mm,列車的最高車速為385Km/h,測試區間為長沙南站到株洲西站的實車實路況測試。
測試過程中的最高時速為384.12km/h,平均速度為292.12km/h,電機的平均轉速為2452RPM,沒有采用矢量控制模型動力系統的高速列車最高時速為361.42km/h,平均車速為244.43Km/h,驅動系統電機的平均轉速為2962RPM,由此可見平均轉速減小了510RPM,采用矢量控制模型的高速列車的工作效率得到提升,發熱量、工作效率、應對臨時負載追加的能力同樣因為矢量控制模型介入高速列車動力系統控制過程中而得到了一定的提升。
5 結論
本文建立了包含轉矩、運動、主電機等五個模塊的三相異步電動機的控制模型,之后對新的電力拖動方法在MATLAB/SMULINK環境中建立了三相異步電動機控制的矢量控制仿真模型,對異步電動機的變頻調速矢量控制進行仿真分析,通過新的電力拖動方法進行仿真分析,驗證了本算法的合理性。
參考文獻:
[1]武迪,林榮文,田峰.異步電機矢量控制系統的仿真分析[J].電氣開關,2020,58(02):11-13+18.
[2]孟建軍,趙文濤.基于模糊故障樹的高速列車電流互感器可靠性分析[J].模糊系統與數學,2021,35(03): 155-166.
[3]谷山強,孫鏡堤,張瑞等.高速列車內部過電壓形成原理及抑制措施研究[J].機車電傳動,2020,No.274(03):51-55.
[4]孫寧,陳爭,巨長磊等.高速列車接地系統對車體電流及過電壓分布的影響分析[J/OL].鐵道標準設計:1-10.
[5]李華,林飛,楊中平等.一種可提高轉矩輸出能力的高速列車牽引電機方波工況單環弱磁控制策略[J].鐵道學報,2019,41(10):53-60.
[6]盧琴芬,孔浩,石佳蒙等.高速列車永磁同步牽引電機基于聯合仿真模型的單脈沖控制研究(英文)[J].電工 技術學報,2015,30(14):61-66.
[7]朱海燕,尹必超,胡華濤等.諧波轉矩對高速列車齒輪箱體與牽引電機振動特性的影響[J].交通運輸工程學報,2019,19(06):65-76.
[8]趙心穎,林飛,楊中平等.高速列車牽引傳動系統機電耦合振動特性研究[J].鐵道學報,2018,40(09):40-47.
[9]朱海燕,黎潔,尹必超等.牽引電機懸掛參數對高速列車牽引傳動部件振動特性的影響[J].交通運輸工程學報,2023,23(01):156-169.
[10]Lu X ,Li Y ,Wu M , et al.Rail temperature rise characteristics caused by linear eddy current brake of? high-speed train[J].Journal of Traffic and Transportation Engineering(English Edition),2014,1(06):448-456.