基于浸入與不變自適應的機械臂軌跡跟蹤控制方法
2023-10-26 06:50:32湯元會
西安工程大學學報 2023年4期
湯元會,張 璐
(陜西省計量科學研究院 電子與電磁計量研究所,陜西 西安 710100)
0 引 言
隨著制造業的不斷發展,機械臂作為一種高性能自動化設備,已廣泛應用于生產工業的各個領域[1-2]。然而,機械臂系統具有非線性、強耦合、多變量等特點,易受到模型參數變化的影響[3],對機械臂軌跡跟蹤控制帶來困難。而在一些高精度應用領域,機械臂須具備更高的精確性和更穩的控制性能。因此,如何提高機械臂在模型不確定情況下的跟蹤性能具有重要意義。
在實際應用過程中,很難對機械臂建立精確的動力學模型,模型中往往存在不確定參數。自適應控制因其具有強大的自學能力和魯棒性而得到廣泛的研究[4]。文獻[5]針對模型不確定機械臂的軌跡跟蹤問題,通過神經網絡的逼近能力能夠補償非線性系統的不確定性,設計了基于自適應神經網絡的輸出反饋控制方法。文獻[6]提出了一種自適應模糊反步控制器,以解決機械臂系統中存在的各種非線性和不確定性的問題。文獻[7]將干擾觀測器和自適應滑模控制方法相結合,解決了建模誤差和各類干擾帶來的不確定性。以上方法對具有模型不確定性的機械臂軌跡跟蹤控制問題有一定的貢獻,且都是基于確定性等價原則(certainty equivalence, CE)對不確定參數進行辨識[8]。基于CE設計的參數自適應律,并不是真正估計未知參數值,而是為了消除Lyapunov函數導數中存在的不確定參數項的影響,因此在參數自適應律中并不含有參數估計誤差的負反饋項,而是和跟蹤誤差直接耦合在一起,這就導致跟蹤誤差影響參數估計的過程,而參數估計在控制器中影響跟蹤誤差的動態,兩者直接耦合造成系統閉環性能下降,參數估計誤差和跟蹤誤差無法同時收斂到0,且會出現過參數化問題[9]。雖然文獻[10]解決了這一問題,但是取而代之的是一個更復雜的參數自適應律[11]。
為實現優化,文獻[12]提出了基于非確定性等價(Non-Certainty Equivalence,NonCE)原則的浸入與不變(Immersion and Invariance,I&I)理論。該理論是將一個關于狀態的修正項引入到參數估計誤差中,即在參數估計誤差的微分項中增加不確定參數,確保參數估計誤差能夠收斂到零。但是修正項需求解一個偏微分方程(Partial Differential Equation, PDE)。對一階系統,偏微分方程的解可以通過積分求取;對高階系統,偏微分方程不一定存在解析解,這一情況被稱為“可積性障礙(Interability Obstacle)”。
針對這一障礙,文獻[13-15]提出將動態縮放技術(Dynamic scaling)應用到I&I自適應方法中。該方法在求解過程中引入狀態濾波器,將回歸矩陣中的部分狀態變量替換成濾波器的估計值,使待求解的偏微分方程可解并積分得到其近似解,再引入動態縮放因子消除了近似解和實際解之間的誤差。目前該方法的相關應用多體現在飛行器控制系統上[16-20],而在同樣具有強耦合、非線性特性的機械臂系統上卻鮮有研究。
本文針對具有慣性矩陣參數不確定性的機械臂動力學模型,提出了一種基于改進I&I自適應方法的軌跡跟蹤控制方法。首先,針對I&I自適應理論在機械臂動力學模型中存在“可積性障礙”的問題,引入狀態濾波器,構造新的參數回歸矩陣求得PDE的近似解,并通過設計動態縮放因子消除矩陣改造前后的誤差對系統性能的影響。仿真結果表明,本文所提出的方法具有更優異的跟蹤精度和動態特性。
1 機械臂系統模型
以雙關節機械臂模型為研究對象,其結構示意圖如圖1所示。

圖1 雙關節機械臂示意圖Fig.1 Schematic diagram of a two-joint manipulator
圖1中,li(i=1,2)為連桿長度;qi(i=1,2)為關節轉動角度;mi(i=1,2)為連桿質量;lci(i=1,2)為連桿到質心的距離;Ii(i=1,2)為慣性矩陣。其動力學方程可表示為

在實際運行過程中,慣性矩陣M會發生攝動而使其具有不確定性,因此將慣性矩陣的逆矩陣M-1視為不確定參數。
為提高機械臂跟蹤精度,選取慣性矩陣為未知參數變量,并設計I&I自適應參數估計器和系統的非線性控制律,以確保機械臂關節軌跡能夠跟蹤期望軌跡。
2 自適應控制器設計
2.1 I&I自適應參數估計器設計
為了便于后續對I&I自適應參數估計器的設計,將式(2)所表達的含有不確定參數的雙關節機械臂動力學模型整理為
式中:θ=[θ1θ2θ3],為經過數學變換后的未知慣性矩陣;
ΦT(x1,x2,x3)=[Φ1(x1,x2)Φ2(x1,x2)]=
針對式(3)所表示的非線性系統,設計I&I自適應參數估計器,使其能對未知參數θ值進行估計。I&I自適應參數估計器的構造可以分為3步。
Step 1:根據文獻[8],定義不確定參數的估計誤差,按照I&I自適應控制理論,設計修正項函數β(x)。原則上,β(x)的設計需要求解偏微方程(PDE),但這對于大多數多變量系統來說非常困難。
定義參數估計誤差為
式中:k(·)為待設計的矩陣。
對式(4)求導,得到參數估計誤差的動態方程為
本文所設計的參數自適應律為
將式(7)代入式(6)中得到


(9)
式(9)所示的PDE不滿足可積條件,無法求得該式的解析解。因此下一步通過“近似解”的方法來求解偏微分方程(9)。
Step 2:根據文獻[13]的PDE“近似解”的方法:引入狀態濾波器,將回歸矩陣Φ(x1,x2)中的積分變量用濾波器輸出替代,通過積分得到近似解。本文所設計函數β的具體表達式為
式中:γ>0。
式中:函數δij(·)∈R2。
將式(10)和式(11)代入式(8),得到參數估計誤差的動態為
-γΦT(x1,x2)Φ(x1,x2)z+
式中:Δj(x1,x2,ex2)=[δ1j(x1,x2,ex2)δ2j(x1,x2,ex2)]。從式(12)很明顯看出,Δj(·)是由狀態濾波器引入的誤差項,也可以將其視為偏微分方程真解和近似解之間的誤差。接下來引入動態縮放因子[14]消除偏微分方程真解和近似解之間的誤差。
Step 3:引入動態縮放因子[14],消除近似解和真解之間的誤差,降低前面干擾項的影響,并加快系統的收斂速度,同時也證明所設計的I&I自適應參數估計器的參數估計誤差收斂到零。引入動態縮放因子r,定義縮放后的參數估計誤差:
式中:r是待設計的動態縮放因子。對式(13)求導并將式(12)代入得到:
所設計的動態縮放因子的具體形式為
對濾波誤差ex2求導,并將式(3)和式(5)代入,得到濾波誤差的動態方程為
式中:k(·)為待設計的對稱矩陣。
通過設計矩陣k(·),確保動態縮放因子r是有界的,并且系統在(η,ex2)=(0,0)處具有全局一致穩定的平衡點,即
k=κr2I+εcr2diag‖Δj(x1,x2,ex2)‖2
(17)
式中:κ和ε為正常數。
構造Lyapunov函數V(η)=0.5ηTη,對其求導并將式(14)代入,并結合Yang不等式得
因此,系統在原點具有全局一致穩定的平衡點,且從式(13)和上述分析明顯看出,如果r∈L∞,則z(t)→0。下面驗證r的有界性。
首先構造Lyapunov函數
對式(19)求導并將式(16)、(17)、(18)代入,結合Yang不等式得到
由此得到系統在(η,ex2)=(0,0)處具有一致全局穩定的平衡點。
構造Lyapunov函數
對其求導,并將式(14)、(15)、(16)、(17)代入得
2.2 反步控制律設計
基于反步控制方法設計機械臂的控制輸入τ,其具體設計過程如下。
Step 1:定義跟蹤誤差e1=x1-xd,對其求導得
定義x2的跟蹤誤差信號:
e2=x2-α1
(25)
式中:α1為x2的虛擬控制輸入,設計虛擬控制律α1使e1穩定。結合Lyapunov穩定性定理,將虛擬控制律α1設計為
式中:c1>0。
將式(25)、(26)代入式(24)得
Step 2:對式(25)所定義的誤差信號求導得
式(29)中,出現了系統的真實控制輸入τ,基于Lyapunov穩定性定理,本文設計的最終控制律為
Cx2+G
(30)
式中:c2>0。將式(30)代入式(29)可得

3 仿真結果及分析
為驗證本文所設計控制器的有效性,在機械臂系統參數和控制器參數保持一致的情況下,選取雙關節機械臂動力學模型作為仿真對象,通過Matlab/Simulink軟件進行仿真,對2種控制方法進行比較。方法1是本文所設計的基于I&I的參數不確定機械臂自適應軌跡跟蹤控制方法(IABC,Immersion and Invariance based Adaptive Backstepping Control);方法2是模型參數已知的反步控制方法(FPBC,Fixed Parameter Backstepping Control)。
雙關節機械臂系統參數選擇如下:
其中
m1=2 kg,m2=0.8 kg,l1=0.5 m,l2=0.5 m,lc1=0.25 m,lc2=0.25 m,g=9.8 m/s2,不確定參數的真實取值為θ=[5 2,2 3]。反步控制器增益采用試湊法,最終取值為c1=1.5,c2=20。跟蹤的期望軌跡設計為xd=[sintsint]T。機械臂關節位置的初始值設置為x1=[0 0]T,機械臂關節速度的初始值設置為x2=[0 0]T。自適應估計器的參數設置為c=γ=10,κ=λ=0.1,ε=0.1,動態縮放因子的初始值設置為r(0)=1。
機械臂系統軌跡跟蹤控制的目標是令機械臂關節角追蹤誤差迅速收斂,并且機械臂的關節角度能對期望軌跡實現準確快速的跟蹤。圖2分別是2個關節的軌跡跟蹤響應曲線。可以看出: 在所提IABC的作用下,無論是關節1還是關節2的軌跡跟蹤響應曲線,都在短暫的動態之后跟蹤上期望軌跡,系統很快進入穩定狀態。因系統參數的不確定性對控制精度帶來的影響被I&I自適應估計器有效抑制,在IABC方法下機械臂的關節能夠很好地跟蹤期望軌跡,擁有良好的跟蹤性能。在相同的控制參數的情況下,使用FPBC的系統一直存在周期性的跟蹤誤差,本文所提出的IABC方法在跟蹤性能上明顯優于FPBC。
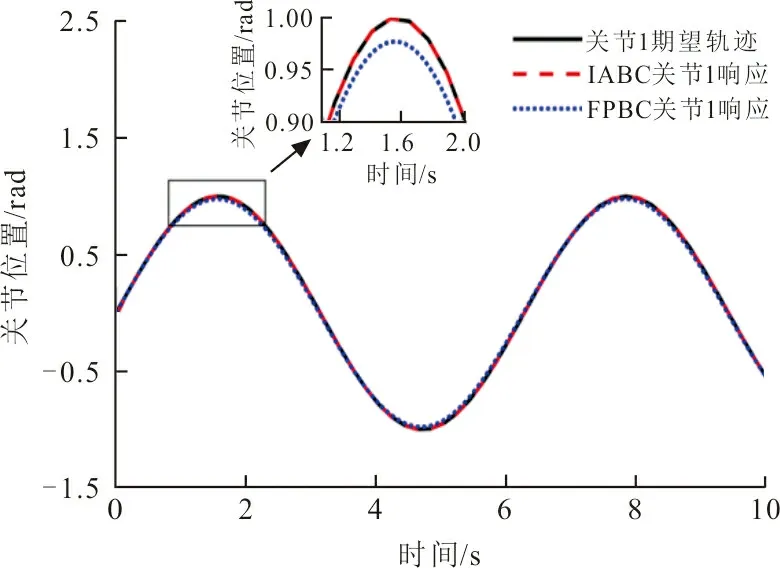
(a) 關節1軌跡跟蹤響應曲線
圖3是IABC和FPBC算法下雙關節剛性機械臂的軌跡跟蹤誤差曲線。
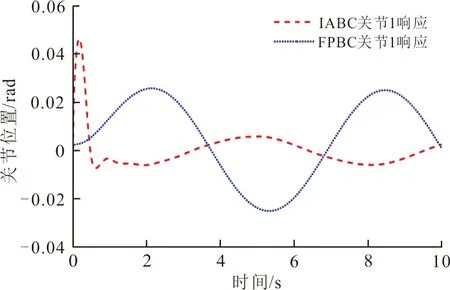
(a) 關節1軌跡跟蹤誤差
從圖3(a)可以看出:關節1在FPBC方法下始終未能跟蹤上期望軌跡,0~10 s內的誤差一直在±0.025 rad之間,并且呈現周期性的變化。雖然開始時誤差較小。但是始終存在誤差,系統的跟蹤性能不夠優越。而本文所提IABC方法雖然在開始時的跟蹤誤差在0.046 rad左右,但是在0.7 s后,跟蹤誤差始終保持在±0.006 rad之間,最大穩態誤差相比FPBC方法降低了約76%,誤差變量收斂范圍更小,跟蹤效果更優。
從圖3(b)可以看出:FPBC方法下的關節2在0~10 s內的跟蹤誤差一直保持在±0.023 rad之間,始終存在周期性的誤差。IABC方法在開始時最大跟蹤誤差達到0.016 rad左右,但是約在0.3 s后實現對給定軌跡的精確跟蹤,最大穩態誤差相比FPBC方法降低了約99.6%,跟蹤效果明顯優于FPBC方法。
圖4分別是狀態濾波器的響應曲線。從圖4中可以看出:2條曲線基本重合,說明可以利用狀態濾波器估計值求解偏微分方程。但是2條曲線并沒有完全重合,存在估計誤差,因此偏微分方程的解只是近似解,與真值解之間存在一定的誤差。

(a) 關節1速度的濾波值
圖5為所設計的動態縮放因子r的響應曲線。觀察圖5可知,動態縮放因子在系統運行一段時間后保持平穩,驗證了文中對動態縮放因子r有界的證明。

圖5 動態縮放因子響應曲線Fig.5 Response curve of dynamic scaling factor
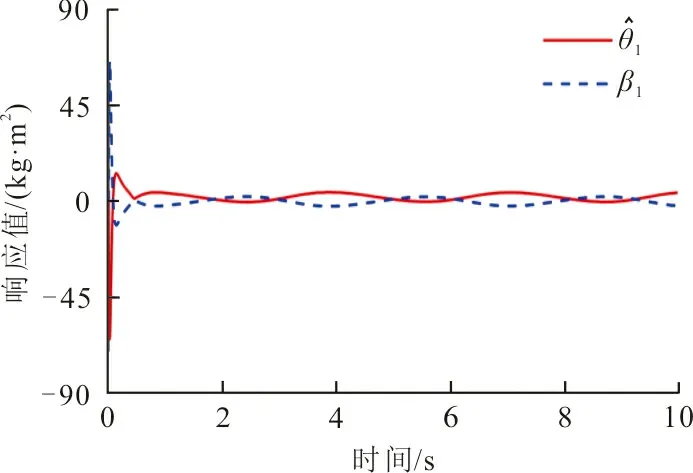
和β1響應曲線


(a) 參數估計誤差z1的響應曲線
4 結 語
為解決雙關節機械臂在運動過程中的系統穩定性和跟蹤精度的問題,提出一種基于I&I自適應反步控制方法。增加了含有狀態變量的非線性可調節函數,提高了參數估計器的靈活可控性。同時,在I&I自適應參數估計器中引入狀態濾波器,求出偏微分方程近似解,然后通過引入動態縮放因子消除近似解和真實解之間的誤差。本文所提控制方法避免了過參數化問題,在保證控制系統對參數自適應能力的同時,降低了機械臂系統的跟蹤誤差,有效提高了系統的跟蹤性能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
科技知識動漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34