采用腦網(wǎng)絡(luò)分析的應(yīng)激誘發(fā)腦-機(jī)接口運(yùn)動感知與反饋激活時序規(guī)律研究
2023-10-29 10:06:48張凱徐光華李文平李輝杜成航韓丞丞張四聰謝杰仁
西安交通大學(xué)學(xué)報 2023年10期
關(guān)鍵詞:實(shí)驗(yàn)
張凱,徐光華,2,李文平,李輝,杜成航,韓丞丞,張四聰,謝杰仁
(1. 西安交通大學(xué)機(jī)械工程學(xué)院,710049,西安;2. 西安交通大學(xué)機(jī)械制造系統(tǒng)工程國家重點(diǎn)實(shí)驗(yàn)室,710054,西安)
腦-機(jī)接口作為一種新型的人機(jī)交互技術(shù),可以在不依賴于腦的正常輸出通路(外圍神經(jīng)和肌肉組織)的情況下,使人類大腦直接與計算機(jī)或其他外部設(shè)備進(jìn)行通信,進(jìn)而控制外部設(shè)備進(jìn)行相應(yīng)的任務(wù)并提供反饋[1]。其中,作為其重要工程的應(yīng)用,運(yùn)動誘發(fā)腦-機(jī)接口為腦損傷閉環(huán)神經(jīng)協(xié)同康復(fù)提供了一種可行的技術(shù)手段,具體通過刺激范式有效誘發(fā)受試者的運(yùn)動中樞使其產(chǎn)生神經(jīng)響應(yīng)信號,再通過信號處理技術(shù)對腦電信號進(jìn)行實(shí)時解碼,然后將解碼得到的運(yùn)動意圖轉(zhuǎn)化為外部設(shè)備的控制指令,輔助受試者完成運(yùn)動輔助和康復(fù)訓(xùn)練[2-4]。該過程有效模擬了運(yùn)動行為控制的中樞響應(yīng)過程,實(shí)現(xiàn)了神經(jīng)沖動沿著運(yùn)動感知環(huán)路—神經(jīng)中樞—運(yùn)動控制環(huán)路—受控肢體的傳導(dǎo),并利用物理接口和雙向通信技術(shù)從大腦外部構(gòu)建了一條閉環(huán)回路,進(jìn)而實(shí)現(xiàn)運(yùn)動控制環(huán)路的重建[5-6]。
基于腦-機(jī)接口技術(shù)的神經(jīng)環(huán)路重建有效性受到多種因素的影響,其中,運(yùn)動感知與控制的時序性對于接口性能與應(yīng)用效能具有重要的影響。Hebb法則與脈沖時間依賴突觸可塑性規(guī)律(spike-timing dependent plasticity, STDP)表明:活動時序依賴的突觸可塑性滿足確定性的時間窗口,直接揭示了有順序的激活突觸前和突觸后神經(jīng)元是修飾環(huán)路的關(guān)鍵,從微觀層面揭示了時序性對神經(jīng)環(huán)路重塑的重要規(guī)律[7-9]。然而,傳統(tǒng)的誘發(fā)范式僅利用依賴主觀認(rèn)知與弱視覺誘發(fā)信息來引導(dǎo)受試者產(chǎn)生自主想象[10-12],其不僅易受到生理狀態(tài)變化的影響,且難以保證運(yùn)動感知與控制的同步性,易導(dǎo)致運(yùn)動誘發(fā)腦-機(jī)接口的中樞響應(yīng)過程在不同試次、不同時間具有高度變異性,直接造成整個交互過程中,運(yùn)動感知神經(jīng)與運(yùn)動控制神經(jīng)的激活過程難以保證同步性和有效時序性(如圖1所示),無法滿足感知反饋同步性和時效性要求,與STDP所揭示的規(guī)律相悖。由此,限制了運(yùn)動誘發(fā)腦-機(jī)接口的應(yīng)用性能,難以保證臨床應(yīng)用中的康復(fù)訓(xùn)練與治療效果。
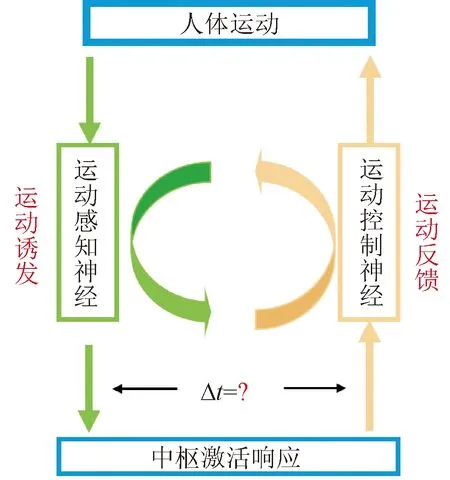
圖1 傳統(tǒng)運(yùn)動誘發(fā)腦-機(jī)接口感知與反饋激活示意Fig.1 The diagram of perception and feedback activation of traditional brain-computer interface based on motor activation
探索運(yùn)動感知環(huán)路與控制環(huán)路激活的強(qiáng)匹配誘發(fā)模式,對于增強(qiáng)閉環(huán)腦-機(jī)交互過程的同步性和時序性具有重要啟示。中樞激活響應(yīng)效果往往取決于刺激范式的設(shè)計,作為一種典型的刺激模式,應(yīng)激反應(yīng)可以定義為各種刺激物(應(yīng)激源)作用于個體而引起的非特異性反應(yīng)。特定條件下的應(yīng)激反應(yīng)有助于提升自主注意力水平,促進(jìn)情緒和思維的正向調(diào)整,并提升交感神經(jīng)的激活程度,引起腦電信號功率的增強(qiáng)[13-14]。文獻(xiàn) [15]研究表明,特異性的重心失衡應(yīng)激刺激會引起運(yùn)動中樞的激活,且該激活方法具有更強(qiáng)的激活程度和更有序的激活效果。因此,應(yīng)激狀態(tài)的出發(fā)時刻引起受試者的必然性運(yùn)動響應(yīng),為腦-機(jī)交互中運(yùn)動感知環(huán)路與反饋控制環(huán)路的有序激活規(guī)律研究提供了一種可行的方法。同時,研究發(fā)現(xiàn),大腦的信息加工和處理過程可以通過特定腦區(qū)之間信號同步強(qiáng)化效果來進(jìn)行表征,其中,研究驅(qū)動源腦區(qū)和神經(jīng)有向連接的相關(guān)規(guī)律對于理解大腦活動和神經(jīng)調(diào)控的時序規(guī)律有著重要的作用[16]。腦功能網(wǎng)絡(luò),是一種將圖論和復(fù)雜網(wǎng)絡(luò)理論應(yīng)用于大腦活動定量分析的研究,作為一種描述大腦皮層不同功能區(qū)相互作用一種方法,可以有效幫助研究人員進(jìn)一步了解腦內(nèi)信息的加工機(jī)制和作用規(guī)律[17]。
因此,本文利用應(yīng)激誘發(fā)腦-機(jī)接口技術(shù)與腦功能網(wǎng)絡(luò)分析手段,探索了運(yùn)動激活響應(yīng)的時序作用規(guī)律,研究了閉環(huán)腦機(jī)時序同步強(qiáng)化方法,為時序同步的腦-機(jī)接口設(shè)計提供有效理論與技術(shù)基礎(chǔ)。
1 應(yīng)激誘發(fā)的時序激活響應(yīng)檢測平臺設(shè)計與搭建
1.1 應(yīng)激狀態(tài)觸發(fā)與運(yùn)動響應(yīng)關(guān)聯(lián)分析
應(yīng)激誘發(fā)運(yùn)動響應(yīng)通常產(chǎn)生于受試者從非應(yīng)激態(tài)轉(zhuǎn)變?yōu)閼?yīng)激態(tài)的瞬時時刻,此時刻對應(yīng)的應(yīng)激參數(shù)定義為應(yīng)激觸發(fā)點(diǎn)(用失衡角度θ表示)。重心失衡作為一種典型的運(yùn)動應(yīng)激刺激,往往伴隨著前庭神經(jīng)的激活,其作用過程可以描述為:前庭感受器受到偏離重力方向的信息時,神經(jīng)中樞通過調(diào)節(jié)四肢的肌張力或控制肢體運(yùn)動來調(diào)整身體的姿態(tài)和體位,以維持身體的平衡。如圖2所示,基于之前研究的重心失衡應(yīng)激腦-機(jī)接口模型[15],受試者會利用肢體進(jìn)行支撐動作,來防止重心的完全失衡,而這種運(yùn)動本質(zhì)上受到本能行為和自主意識的共同支配,因此具有確定的運(yùn)動激活性。因此,這種運(yùn)動響應(yīng)的強(qiáng)關(guān)聯(lián)模式,有望提供一種可控型意念誘發(fā)模式。

(a)重心失衡應(yīng)激平臺
(b)非應(yīng)激態(tài)

(c)應(yīng)激態(tài)
1.2 運(yùn)動感知與反饋控制激活的時序信息檢測平臺設(shè)計
在運(yùn)動調(diào)控的過程中,有效刺激的產(chǎn)生往往伴隨著感知神經(jīng)的激活,運(yùn)動動作的發(fā)生表征了運(yùn)動控制神經(jīng)的激活。對于自然的正常神經(jīng)環(huán)路,運(yùn)動感知與控制環(huán)路的激活幾乎是瞬時同步的,而腦-機(jī)接口構(gòu)建的人工神經(jīng)環(huán)路中,兩者的激活關(guān)系往往不同步,且缺乏有效的激活監(jiān)測手段。
在真實(shí)運(yùn)動任務(wù)下,真實(shí)運(yùn)動的感知與控制反饋近乎同步,因此受試者在應(yīng)激觸發(fā)點(diǎn)位置產(chǎn)生的真實(shí)運(yùn)動會引起運(yùn)動感知與反饋神經(jīng)同時激活。對于腦-機(jī)交互任務(wù),利用外界刺激誘發(fā)運(yùn)動中樞,通過提取腦電激活特征來實(shí)施運(yùn)動控制。由此可以類比得到,有效刺激感知輸入的時刻為運(yùn)動感知環(huán)路的激活時刻,腦電激活特征的啟動時刻為運(yùn)動控制環(huán)路的激活時刻。
由于受試者存在反應(yīng)延遲及腦電的演變過程,腦-機(jī)接口任務(wù)中的感知激活與控制激活往往存在一定的時延。因此,通過記錄受試者在應(yīng)激刺激下應(yīng)激觸發(fā)點(diǎn)與腦電特征響應(yīng)點(diǎn)對應(yīng)的時刻,有望得到腦-機(jī)交互過程中運(yùn)動感知與控制反饋環(huán)路激活的相對時序關(guān)系。為此,設(shè)計了如圖3所示的應(yīng)激觸發(fā)點(diǎn)與運(yùn)動誘發(fā)激活檢測的多源信息采集系統(tǒng)。

圖3 多源生理信息采集系統(tǒng)Fig.3 The acquisition system for multi-source physiological information
陀螺儀位姿傳感器通過對重心偏移的角度進(jìn)行采集以捕捉應(yīng)激點(diǎn)對應(yīng)的角度和時刻參數(shù),薄膜壓力傳感器通過對接觸力變化進(jìn)行監(jiān)測判斷肢體真實(shí)運(yùn)動產(chǎn)生的時刻,腦電信號則是從中樞層面反映運(yùn)動激活響應(yīng)的動態(tài)變化。
為了減小測量過程的誤差,對不同傳感器之間時序標(biāo)定進(jìn)行統(tǒng)一標(biāo)準(zhǔn)化設(shè)置,以保證多源信息采集與任務(wù)狀態(tài)的變化一致性。同時,為保證隨動座椅與傳感器之間的實(shí)時通信,采用TCP/IP與串口通信完成系統(tǒng)控制的信號的實(shí)時處理,其具體框架如圖4所示。
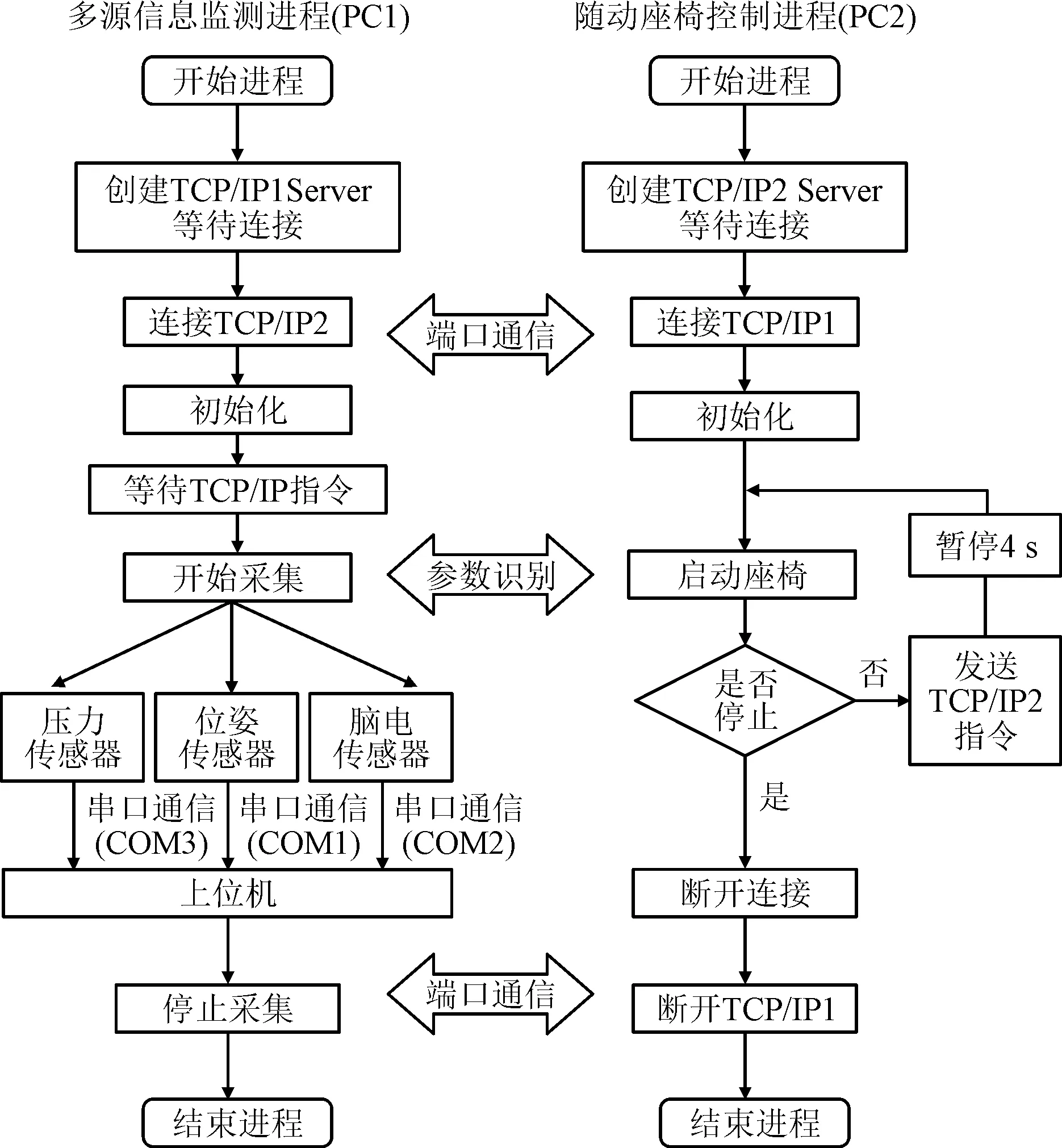
圖4 多源信息采集與運(yùn)動誘發(fā)平臺軟件系統(tǒng) Fig.4 The multi-source information acquisition and motion induction platform software system
隨動座椅與多源信號采集系統(tǒng)采用TCP/IP進(jìn)行交互通信、接收信號、處理進(jìn)程并記錄受試者生理信號隨座椅運(yùn)動的動態(tài)過程。在真實(shí)運(yùn)動或意念激活的信號檢測過程中:利用真實(shí)運(yùn)動的接觸力變化對應(yīng)旋轉(zhuǎn)座椅角度變化,可以得到反映感知神經(jīng)激活的應(yīng)激點(diǎn)參數(shù);分析計算腦電信號的激活時刻,可以求得運(yùn)動控制神經(jīng)的激活時刻。
2 腦-機(jī)接口運(yùn)動感知與反饋激活檢測方法設(shè)計
2.1 運(yùn)動應(yīng)激觸發(fā)點(diǎn)檢測實(shí)驗(yàn)設(shè)計
為求解應(yīng)激觸發(fā)點(diǎn)對應(yīng)的刺激參數(shù),設(shè)計了如圖5所示的實(shí)驗(yàn)。

圖5 應(yīng)激誘發(fā)-運(yùn)動執(zhí)行反饋實(shí)驗(yàn)方案示意 Fig.5 The diagram of stress response induction and motor execution feedback
在運(yùn)動執(zhí)行實(shí)驗(yàn)過程中,前2 s為運(yùn)動準(zhǔn)備階段,受試者在無物理限位的隨動座椅上保持靜止。從第2 s起,座椅隨機(jī)向左/右方向以10 rad/s的速度勻速旋轉(zhuǎn)。期間,要求受試者在無支撐接觸力的條件下,盡量保持身體平衡,直到座椅偏轉(zhuǎn)到失衡的臨界點(diǎn),本能反應(yīng)驅(qū)使受試者利用手部支撐座椅扶手,以保持身體平衡,該動作發(fā)生過程被布置于支撐點(diǎn)的壓力薄膜傳感器所記錄。在整個過程中,陀螺儀全程記錄不同時刻對應(yīng)的偏移角度。
通過記錄支撐接觸力產(chǎn)生時刻的對應(yīng)的偏移角度,即可確定引起應(yīng)激狀態(tài)觸發(fā)的失衡角度θ,即應(yīng)激點(diǎn)。由于本文的研究對象為左右手運(yùn)動意念誘發(fā)任務(wù),因此通過多次重復(fù)左右側(cè)運(yùn)動偏轉(zhuǎn)實(shí)驗(yàn)任務(wù),將疊加平均后的結(jié)果定義為單側(cè)手的應(yīng)激點(diǎn)。
2.2 腦電激活響應(yīng)檢測實(shí)驗(yàn)設(shè)計
相比真實(shí)運(yùn)動,腦-機(jī)交互過程中感知神經(jīng)的激活通常為外界刺激輸入的時刻,控制神經(jīng)環(huán)路激活的判據(jù)通常為腦電激活特征的產(chǎn)生時刻,而這種模式下的感知與激活存在一定的時延。
因此,記錄應(yīng)激點(diǎn)產(chǎn)生時刻與腦電特征啟動時刻的時延,為量化運(yùn)動感知與反饋的激活同步關(guān)系提供了一種可行的方案。為此,根據(jù)運(yùn)動執(zhí)行實(shí)驗(yàn)得到的應(yīng)激點(diǎn)參數(shù),設(shè)計應(yīng)激刺激運(yùn)動誘發(fā)實(shí)驗(yàn)方案,如圖6所示。
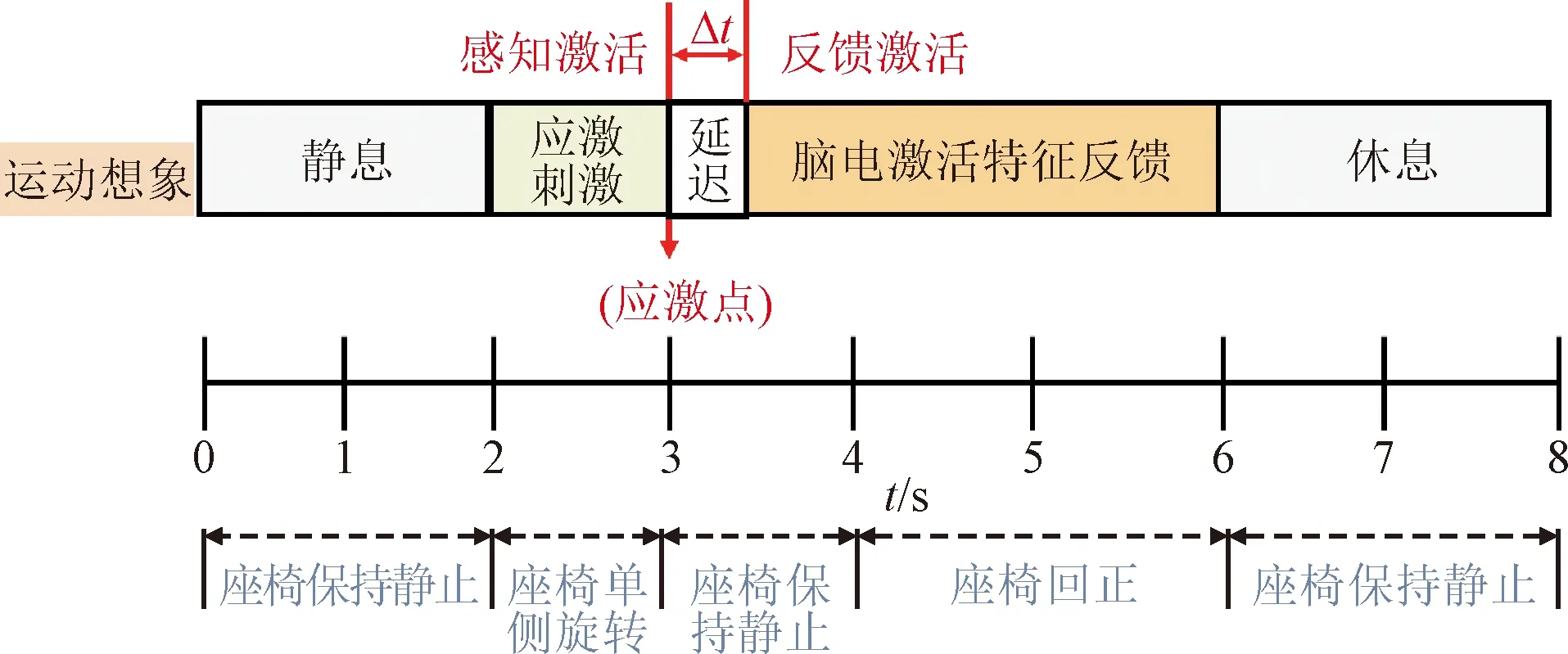
圖6 應(yīng)激誘發(fā)-運(yùn)動激活反饋實(shí)驗(yàn)方案示意 Fig.6 The diagram of stress response induction and motor activation feedback
首先,利用運(yùn)動執(zhí)行實(shí)驗(yàn)所求解的應(yīng)激點(diǎn)參數(shù)對隨動座椅的偏移角速度、位移進(jìn)行設(shè)置,具體通過調(diào)整隨動座椅的偏轉(zhuǎn)角速度ω;然后,從第2 s起,座椅啟動并在1 s內(nèi)偏轉(zhuǎn)到應(yīng)激觸發(fā)點(diǎn)的位置,此時采用安全限位裝置代替受試者的運(yùn)動支撐,以保證受試者在實(shí)驗(yàn)全程保持靜止;從應(yīng)激點(diǎn)后,受試者執(zhí)行自主意念誘發(fā)任務(wù),直到第6 s,單次實(shí)驗(yàn)結(jié)束。
2.3 實(shí)驗(yàn)條件及腦電數(shù)據(jù)采集
為了探索時序依賴的腦電響應(yīng)規(guī)律,構(gòu)建感知同步運(yùn)動誘發(fā)接口,招募了12名受試者(男7女5),身體健康無精神疾病,雙眼矯正視力正常,平均年齡(24±2.5)歲。所有受試者都被告知實(shí)驗(yàn)的全部程序,并簽署知情同意協(xié)議。
實(shí)驗(yàn)使用奧地利g.tec公司生產(chǎn)的g.Nautilus高精度無線生物電信號采集分析系統(tǒng),可以用于運(yùn)動狀態(tài)下的腦電信號采集,其內(nèi)置阻抗檢測功能可測量電極與頭皮接觸電阻,精度達(dá) kΩ 級,并具有硬件帶通濾波和陷波濾波功能。選取運(yùn)動區(qū)域的相關(guān)電位活動作為分析對象,根據(jù)10/10 標(biāo)準(zhǔn)電極布置法則,在受試者頭部運(yùn)動皮層相關(guān)區(qū)域布置電極,其分別位于FC3、C3、CP3、Cz、FC4、C4、CP4、CPz,參考電極位于右耳耳垂(A2),接地電極(GND)位于前額(FPz)。同時,保證所有阻抗保持在5 kΩ以下。腦電圖信號的采樣率設(shè)置為500 Hz,采用50 Hz陷波濾波器和3~100 Hz帶通濾波器濾波。在進(jìn)行信號分析之前,對每個受試者不同任務(wù)的腦電信號進(jìn)行疊加平均,以盡可能減少噪聲和異常值對分析結(jié)果的干擾。同時,去掉誤差較大和不可用的試次,以保證后續(xù)分析結(jié)果的準(zhǔn)確性。
轉(zhuǎn)椅采用數(shù)字伺服控制器(Syntron-543AA0),精度為0.1°,配備三軸加速度計(witt-jy901),以記錄實(shí)際位移運(yùn)動學(xué)。搭載壓力薄膜傳感器(IMS-S08A),最大量程可達(dá)40 kg。所有的運(yùn)動參數(shù)(旋轉(zhuǎn)角度/角速度)都可以手動指定。
實(shí)驗(yàn)時,每個受試者要依次參與3類實(shí)驗(yàn):運(yùn)動執(zhí)行,應(yīng)激刺激運(yùn)動誘發(fā)(VSMI)與無應(yīng)激運(yùn)動想象(MI)實(shí)驗(yàn)。其中,VSMI實(shí)驗(yàn)中提供應(yīng)激刺激和視覺提示,MI實(shí)驗(yàn)中僅供座椅旋轉(zhuǎn)的視覺動畫作為提示。運(yùn)動執(zhí)行實(shí)驗(yàn)一共分為3組,每組完成 10次重復(fù)實(shí)驗(yàn),每組間隔2 min。兩種運(yùn)動誘發(fā)實(shí)驗(yàn)各需要完成6組實(shí)驗(yàn),每組開展 10 次重復(fù)實(shí)驗(yàn),每組間隔3 min。當(dāng)受試者在參與腦電采集實(shí)驗(yàn)過程中,應(yīng)盡量避免肢體或者頭部運(yùn)動、吞咽口水、咬牙。實(shí)驗(yàn)過程中,實(shí)時記錄腦電數(shù)據(jù)、壓力數(shù)據(jù)、位姿數(shù)據(jù)、時標(biāo)信息。
3 基于腦網(wǎng)絡(luò)分析的時序依賴規(guī)律量化方法研究
由于EEG能夠直接測量神經(jīng)活動且具有高時間分辨率,探索基于EEG的跨腦區(qū)功能連接對理解大腦運(yùn)動功能的調(diào)控機(jī)制具有重要的作用。研究表明,特定腦區(qū)信號之間的同步強(qiáng)化增強(qiáng)作用可以通過腦功能性連接進(jìn)行表征[18],而這種連接關(guān)系的動態(tài)特征能夠通過多項(xiàng)指標(biāo)進(jìn)行定量評估。在腦電信號分析的領(lǐng)域,研究人員提出了多種算法來定義信號之間的功能連接指標(biāo),常見的如皮爾遜相關(guān)系數(shù)、波譜相干、互信息、相滯指數(shù)等[19-20],其中,有向傳遞函數(shù)是一種用多變量自回歸模型來表征腦電信號功能性連接強(qiáng)弱的方法,并遵循格蘭杰因果關(guān)系多變量有效測量規(guī)律[21]。其主要通過計算單通道輸入信息和輸出信息的信息量的關(guān)系,來衡量單通道對其他通道的信息貢獻(xiàn)量關(guān)系,進(jìn)而定性判斷不同腦區(qū)響應(yīng)之間相互聯(lián)系與影響。本節(jié)通過引入腦網(wǎng)絡(luò)分析方法,利用MATLAB的econnectome工具箱,對應(yīng)激點(diǎn)誘發(fā)下中樞響應(yīng)時序演化規(guī)律進(jìn)行研究,以揭示應(yīng)激調(diào)控的內(nèi)在作用機(jī)制,驗(yàn)證所提腦-機(jī)接口方法對于中樞響應(yīng)同步性增強(qiáng)的有益效果。
首先,利用多變量的自回歸模型(multivariate autoregressive, MVAR)來描述一個N通道的EEG信號[22],X(n)=[x1(n),x2(n),…,xN(n)]。利用靜息態(tài)和激活態(tài)的腦電信號計算激活比E
(1)
(2)
式中:E為激活能量比;A為激活態(tài)腦電信號的能量;R為靜息態(tài)腦電信號的能量;m為運(yùn)動激活啟動時間點(diǎn);n為單試次總時間點(diǎn);r=1,2,3,…,p為MVAR的階數(shù);Ar為系數(shù)矩陣;w(n)為高斯白噪聲。
然后,將所求系數(shù)矩陣與信號表示投影到頻域,得到
W(f)=Ar(f)X(f)
(3)
(4)
計算系統(tǒng)傳遞矩陣D(f)
(5)
式中D(f)元素Dij表示系統(tǒng)中第j個輸入與第i個輸出之間的關(guān)系。
將EEG中第j通道對第i通道的影響關(guān)系定義為
(6)

由此,計算單通道的傳遞函數(shù)與所有相關(guān)通道的元素平方和,即可得到有向傳遞函數(shù)的表達(dá)式
(7)

(8)

有向傳遞函數(shù)對通道之間信息交流進(jìn)行了定量的評估,為了進(jìn)一步挖掘運(yùn)動激活響應(yīng)過程腦網(wǎng)絡(luò)的動態(tài)屬性,本文采用圖分析的方法計算響應(yīng)的加權(quán)網(wǎng)絡(luò)性質(zhì),旨在實(shí)現(xiàn)對大腦激活狀態(tài)時序規(guī)律的捕捉。作為一種定量評估腦網(wǎng)絡(luò)局部信息處理的效率的指標(biāo),聚類系數(shù)常常被用來表征網(wǎng)絡(luò)功能分化能力以及評估網(wǎng)絡(luò)集群程度[23],而運(yùn)動皮層腦區(qū)的激活程度,往往也伴隨著局部信息處理效率的增加而增加。因此,選取聚類系數(shù)C作為腦激活狀態(tài)動態(tài)評估的指標(biāo)之一,計算式為
C=
(9)
式中:i、j、h分別為腦網(wǎng)絡(luò)中的任意節(jié)點(diǎn);ωij為節(jié)點(diǎn)i和節(jié)點(diǎn)j之間的連通性強(qiáng)度;z為網(wǎng)絡(luò)節(jié)點(diǎn)數(shù);Z為網(wǎng)絡(luò)節(jié)點(diǎn)的集合。
特征路徑長度L是一種評估網(wǎng)絡(luò)功能整合能力的常用指標(biāo)[24],其定義為網(wǎng)絡(luò)中任意兩個節(jié)點(diǎn)之間的平均值。特征路徑長度越短,網(wǎng)絡(luò)功能整合能力就越強(qiáng),網(wǎng)絡(luò)連通性越好。特征路徑長度計算式為
(10)

全局網(wǎng)絡(luò)效率EG作為一種表征網(wǎng)絡(luò)功能集成屬性的指標(biāo)[25],數(shù)值大小與路徑長度呈反比,可以更加直觀地反映腦網(wǎng)絡(luò)全局信息的傳輸能力,計算式為
(11)
作為描述大腦不同腦區(qū)之間局部信息傳輸能力的重要指標(biāo)[26],局部效率EL可以表征網(wǎng)絡(luò)功能分離的程度,進(jìn)而對不同區(qū)域活動的規(guī)律進(jìn)行評價,計算式為

(12)
4 實(shí)驗(yàn)與結(jié)果
腦網(wǎng)絡(luò)功能連接能夠有效反映運(yùn)動信息加工處理過程和不同腦區(qū)的協(xié)同工作機(jī)制,以進(jìn)一步揭示運(yùn)動行為控制任務(wù)下的大腦的工作機(jī)制。為此,采用腦網(wǎng)絡(luò)分析方法進(jìn)一步探索運(yùn)動激活響應(yīng)的動態(tài)演化過程。
雖然本文僅對8通道腦電信號進(jìn)行腦網(wǎng)絡(luò)分析,但該布置對負(fù)責(zé)運(yùn)動皮層的主要通道(FC3、C3、CP3、Cz、FC4、C4、CP4)進(jìn)行了覆蓋,且能保證對運(yùn)動誘發(fā)任務(wù)中對側(cè)運(yùn)動皮層之間的信息交互規(guī)律捕捉,因此具有可行性。同時,由于應(yīng)激刺激對于其他皮層的誘發(fā)響應(yīng)規(guī)律尚不明確,為了避免其他腦區(qū)激活響應(yīng)對運(yùn)動皮層的分析帶來干擾,故未擴(kuò)大通道的選擇范圍。
4.1 腦功能網(wǎng)絡(luò)連接分析
腦功能連接反映中樞激活的主要表現(xiàn)形式,可以描述為:核心激活區(qū)將作為質(zhì)心樞紐,與其他相關(guān)區(qū)域建立連接,協(xié)同完成信息加工。在由左右手運(yùn)動誘發(fā)/執(zhí)行所引起的運(yùn)動激活過程中,靜息態(tài)下的兩側(cè)腦網(wǎng)絡(luò)呈現(xiàn)對稱態(tài),單側(cè)手運(yùn)動激活態(tài)下的網(wǎng)絡(luò)呈現(xiàn)偏側(cè)化形態(tài),通常表現(xiàn)為對側(cè)運(yùn)動皮層激活,與同側(cè)區(qū)域建立有向連接。
為了評估本小節(jié)所提出方法對運(yùn)動刺激的激活響應(yīng)規(guī)律,本文通過對應(yīng)激刺激運(yùn)動誘發(fā)過程的網(wǎng)絡(luò)連接的動態(tài)過程進(jìn)行可視化,用以分析運(yùn)動響應(yīng)的感知同步關(guān)系,評估結(jié)果如圖7所示。

(a)左手運(yùn)動誘發(fā)腦網(wǎng)絡(luò)激活變化規(guī)律

(b)右手運(yùn)動誘發(fā)腦網(wǎng)絡(luò)激活變化規(guī)律

(c)左手運(yùn)動想象腦網(wǎng)絡(luò)激活變化規(guī)律

(d)左手運(yùn)動想象腦網(wǎng)絡(luò)激活變化規(guī)律
對同一任務(wù)下的腦電信號進(jìn)行疊加平均,提取μ頻段(8~12 Hz)和β頻段(13~30 Hz)的腦電信號作為分析對象。如圖7(a)所示:在運(yùn)動準(zhǔn)備階段,左右兩側(cè)枕葉皮層產(chǎn)生激活,網(wǎng)絡(luò)結(jié)構(gòu)呈現(xiàn)對稱狀態(tài);應(yīng)激刺激開始,旋轉(zhuǎn)座椅向左側(cè)偏轉(zhuǎn),運(yùn)動皮層網(wǎng)絡(luò)結(jié)構(gòu)由對稱態(tài)變?yōu)槠珎?cè)化,右側(cè)運(yùn)動皮層的CP4、C4通道作為質(zhì)心通道,控制信息流向其他區(qū)域流出,完成對運(yùn)動信息的協(xié)同處理;達(dá)到應(yīng)激點(diǎn)后,停止外源刺激,應(yīng)激響應(yīng)占據(jù)主導(dǎo)思維活動,此時腦網(wǎng)絡(luò)連接密度增加,皮層激活逐漸達(dá)到峰值;隨著激活過程的結(jié)束,腦網(wǎng)絡(luò)由偏側(cè)化恢復(fù)到對稱態(tài)。圖7(b)反映了右手運(yùn)動激活的腦網(wǎng)絡(luò)變化規(guī)律,激活質(zhì)心為左側(cè)腦區(qū)的C3、CP3通道,演化過程與7(a)所示規(guī)律具有一致性。由此可以說明,偏側(cè)化重心失衡刺激會誘導(dǎo)受試者產(chǎn)生與運(yùn)動誘發(fā)/運(yùn)動執(zhí)行相同的腦網(wǎng)絡(luò)模式,當(dāng)失衡點(diǎn)達(dá)到應(yīng)激觸發(fā)點(diǎn)后,該運(yùn)動激活引起的網(wǎng)絡(luò)連接和信息交流會更加密集。由此可以說明,應(yīng)激觸發(fā)不僅與傳統(tǒng)運(yùn)動中樞激活具有一致性,而且能有效強(qiáng)化運(yùn)動腦區(qū)之間的信息交流和傳遞。
4.2 基于腦網(wǎng)絡(luò)動力學(xué)特性的響應(yīng)規(guī)律表征
腦網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)可以直觀反映中樞響應(yīng)的演化過程,而網(wǎng)絡(luò)參數(shù)的量化可以實(shí)現(xiàn)對中樞響應(yīng)時序關(guān)系的表征。因此,通過量化腦網(wǎng)絡(luò)的聚類系數(shù)、特征路徑長度、全局效率與局部效率在誘發(fā)任務(wù)的動態(tài)參數(shù)變化來表征運(yùn)動刺激與中樞激活程度的時序變化規(guī)律,具體結(jié)果如圖8所示。

(a)聚類系數(shù)
(b)特征路徑長度

(c)全局效率

(d)局部效率
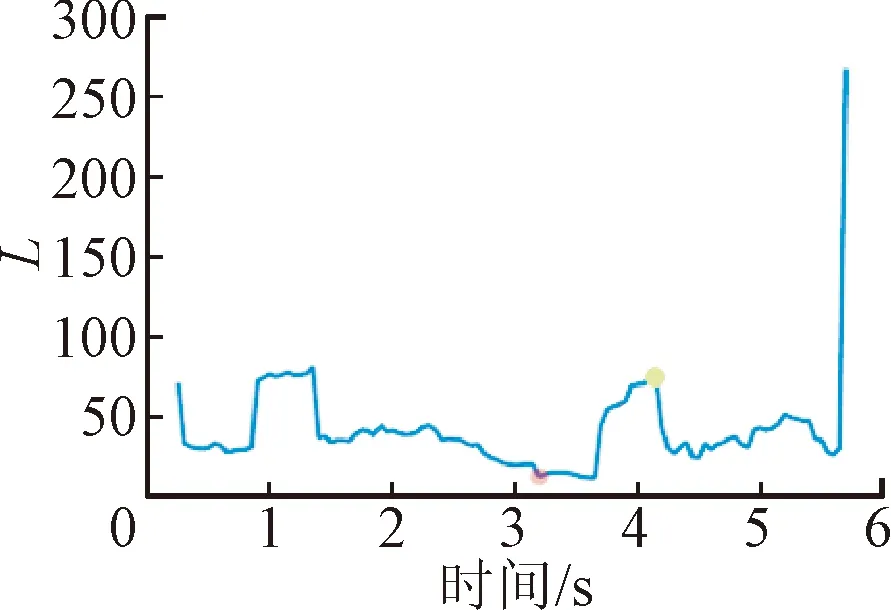
圖8給出了1名受試者所有數(shù)據(jù)疊加平均后的網(wǎng)絡(luò)參數(shù)變化。可以看出,在運(yùn)動準(zhǔn)備階段(0~2 s),腦網(wǎng)絡(luò)的聚類程度和信息處理效率較低;隨著應(yīng)激刺激的啟動(2~3 s),C、EG、EL曲線先下降而后急劇上升,表明大腦在受到應(yīng)激事件后,先表現(xiàn)出一定延遲,然后運(yùn)動皮層之間信息加工在短時間內(nèi)迅速增加;達(dá)到應(yīng)激點(diǎn)后(3~4 s),運(yùn)動激活主導(dǎo)此刻的思維活動,該時間段內(nèi)的C、EG、EL曲線小幅度下降后又持續(xù)攀升,并達(dá)到峰值,峰值時刻代表了運(yùn)動皮層激活最強(qiáng)的狀態(tài);運(yùn)動誘發(fā)任務(wù)結(jié)束后(4~6 s),隨動座椅回正,大腦信息加工效率逐漸從峰值降低,隨著受試者回到靜息態(tài),恢復(fù)到與運(yùn)動準(zhǔn)備階段相同的水平。不同于上述3個參數(shù),特征路徑長度表征了網(wǎng)絡(luò)功能整合能力,長度越短,整合能力越強(qiáng)。雖然變化規(guī)律與上述3個參數(shù)相反,但揭示的規(guī)律具有一致性。
4.3 感知反饋激活時序規(guī)律的量化統(tǒng)計分析
本小節(jié)對12名受試者的應(yīng)激點(diǎn)參數(shù)、激活響應(yīng)時延以及激活最大持續(xù)時間進(jìn)行統(tǒng)計。應(yīng)激點(diǎn)參數(shù)和運(yùn)動響應(yīng)的激活時延由量化分析方法[15]得到,最大激活持續(xù)時間通過腦網(wǎng)絡(luò)動力學(xué)參數(shù)變化規(guī)律得到,即記錄激活啟動點(diǎn)(圖8中紅色標(biāo)識點(diǎn))與響應(yīng)峰值(圖8中綠色標(biāo)識點(diǎn))對應(yīng)的時間區(qū)間。對疊加平均后的信號進(jìn)行統(tǒng)計分析,結(jié)果如表1所示。
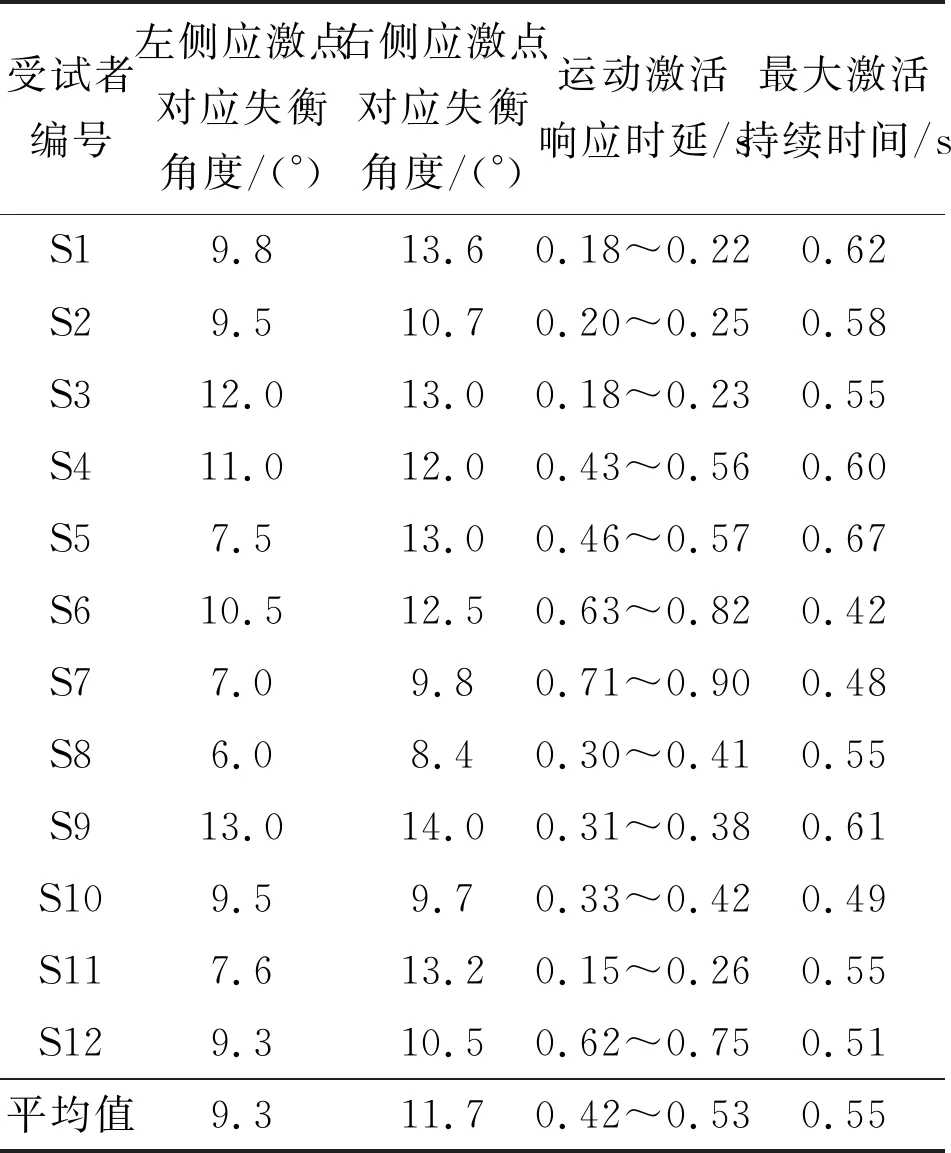
表1 應(yīng)激刺激中樞響應(yīng)參數(shù)
由統(tǒng)計結(jié)果可知,同一受試者的左右側(cè)應(yīng)激點(diǎn)都具有差異,表明了受試者在失衡刺激下左右側(cè)運(yùn)動響應(yīng)水平具有一定的差別,且右側(cè)身體平衡控制能力普遍優(yōu)于左側(cè)平衡的控制,這可能取決于個體的利手特性。雖然本實(shí)驗(yàn)未將利手因素作為受試者篩選的條件,但是由于人群中右利手的人數(shù)普遍大于左利手人數(shù),所以受試者群體的右側(cè)平衡控制能力優(yōu)于左側(cè)平衡控制能力,也符合右利手在人群中數(shù)量占優(yōu)的規(guī)律。不同受試者自主意念誘發(fā)的響應(yīng)時延規(guī)律具有差異性,即感知與反饋響應(yīng)的時延為0.15~0.90 s不等,但最大激活響應(yīng)時間的持續(xù)時間具有一致性,為400~600 ms。不難理解,由于受到個體差異的影響,不同受試者對于應(yīng)激的響應(yīng)水平與腦-機(jī)交互的操作能力都具有一定的差異性,這也決定了外部“神經(jīng)搭橋”感知-激活的延遲特異性。不過,有效的激活響應(yīng)量化結(jié)果可以指導(dǎo)腦-機(jī)接口外源刺激、系統(tǒng)響應(yīng),輔助訓(xùn)練參數(shù)的更新優(yōu)化,以達(dá)到誘發(fā)可控、時序同步的交互效果。
4.4 應(yīng)激觸發(fā)激活響應(yīng)同步增強(qiáng)效果驗(yàn)證
為了驗(yàn)證應(yīng)激觸發(fā)點(diǎn)誘發(fā)對于閉環(huán)調(diào)控同步增強(qiáng)的效果,本小節(jié)分析對比應(yīng)激觸發(fā)運(yùn)動誘發(fā)與無應(yīng)激運(yùn)動想象實(shí)驗(yàn)結(jié)果。實(shí)驗(yàn)通過有應(yīng)激和無應(yīng)激的外界刺激誘發(fā)受試者產(chǎn)生中樞的激活響應(yīng),利用不同誘發(fā)模式下感知反饋激活響應(yīng)時延,驗(yàn)證應(yīng)激觸發(fā)的同步增強(qiáng)效果,分析結(jié)果如圖9所示。

圖9 不同誘發(fā)模式下感知反饋激活響應(yīng)時延Fig.9 The delay for motor perception and feedback activation in different evoked pattern
由分析結(jié)果可知,所有受試者在應(yīng)激觸發(fā)點(diǎn)后的1 s內(nèi)都產(chǎn)生了運(yùn)動激活響應(yīng),12名受試者的感知反饋平均時延為0.629 8 s,而傳統(tǒng)的運(yùn)動想象平均響應(yīng)時間長達(dá)1.782 9 s。除受試者S6以外,兩種范式對于其他所有受試者的響應(yīng)都具有顯著性差異(p<0.01),且應(yīng)激刺激的誘發(fā)響應(yīng)同步性在所有受試者之間都高于傳統(tǒng)的運(yùn)動想象,由此證明了應(yīng)激刺激對于運(yùn)動激活響應(yīng)的有序性調(diào)控具有積極的影響。受試者S6在應(yīng)激誘發(fā)任務(wù)中產(chǎn)生的效果沒有優(yōu)于傳統(tǒng)想象,可能的原因是由于受試者尚未在訓(xùn)練過程中適應(yīng)失衡應(yīng)激的刺激模式,進(jìn)而導(dǎo)致其無法利用應(yīng)激刺激完成主觀運(yùn)動意念的激活。也可能是在失衡刺激中產(chǎn)生了身體運(yùn)動,進(jìn)而給腦電信號帶來了較大的串?dāng)_。
圖9表明,應(yīng)激運(yùn)動誘發(fā)相較于傳統(tǒng)的運(yùn)動想象具有更強(qiáng)的誘發(fā)效果,結(jié)合上文中提到應(yīng)激刺激的作用效果,其可能原因是:在重心失衡應(yīng)激刺激下,受試者的自主神經(jīng)運(yùn)動控制會對重心失衡的狀態(tài)產(chǎn)生應(yīng)激反應(yīng),進(jìn)而導(dǎo)致其前庭神經(jīng)以及負(fù)責(zé)運(yùn)動感知和決策的前額葉在應(yīng)激刺激過程中產(chǎn)生激活,而伴隨著受試者主觀運(yùn)動意圖的響應(yīng),運(yùn)動皮層隨之激活,在前額葉的激活前提下,該運(yùn)動激活效果可能具有疊加效果,進(jìn)而產(chǎn)生誘發(fā)增強(qiáng)的效果。
5 結(jié) 論
本文面向運(yùn)動誘發(fā)腦-機(jī)交互過程中運(yùn)動感知環(huán)路與反饋環(huán)路激活的時序規(guī)律展開研究,通過應(yīng)激運(yùn)動誘發(fā)腦-機(jī)接口平臺,開展重心失衡任務(wù)下的運(yùn)動誘發(fā)激活時序檢測方法,研究基于腦功能網(wǎng)絡(luò)的激活時序量化規(guī)律,揭示了應(yīng)激刺激腦-機(jī)交互過程中,運(yùn)動感知激活與控制激活的時序規(guī)律和腦網(wǎng)絡(luò)動態(tài)演化過程。
腦功能網(wǎng)絡(luò)分析結(jié)果表明,應(yīng)激刺激運(yùn)動誘發(fā)的網(wǎng)絡(luò)動態(tài)演化規(guī)律與傳統(tǒng)運(yùn)動激活響應(yīng)的演化規(guī)律具有一致性,且在達(dá)到應(yīng)激觸發(fā)點(diǎn)后,運(yùn)動中樞的網(wǎng)絡(luò)連接密度和信息交流會變得更加密集,其動力學(xué)特性表征的腦激活響應(yīng)更加強(qiáng)烈。通過檢測應(yīng)激觸發(fā)點(diǎn)與腦電激活響應(yīng)點(diǎn),可以實(shí)現(xiàn)腦-機(jī)交互任務(wù)中,感知神經(jīng)與運(yùn)動控制神經(jīng)激活時延的有效量化。在線實(shí)驗(yàn)結(jié)果表明,負(fù)責(zé)運(yùn)動控制的腦電特征一般會出現(xiàn)于運(yùn)動感知激活后的0.15~0.90 s內(nèi),具體時延在不同受試者之間具有差異性,而其最大激活響應(yīng)的持續(xù)時間為400~600 ms,在不同受試者之間具有一致性。同時,基于應(yīng)激觸發(fā)的運(yùn)動意念誘發(fā)模型,可以有效提升感知環(huán)路與控制環(huán)路神經(jīng)激活的同步性,且該同步性的增強(qiáng)效果具有顯著性。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55