燃?xì)廨啓C(jī)動(dòng)力渦輪轉(zhuǎn)子動(dòng)力學(xué)相似試驗(yàn)?zāi)P偷脑O(shè)計(jì)方法研究
2023-10-29 10:22:52黃朝暉袁奇余承智高進(jìn)孔祥林
西安交通大學(xué)學(xué)報(bào) 2023年10期
黃朝暉,袁奇,余承智,高進(jìn),孔祥林
(1. 西安交通大學(xué)能源與動(dòng)力工程學(xué)院,710049,西安; 2. 陜西省葉輪機(jī)械及動(dòng)力裝備工程實(shí)驗(yàn)室, 710049,西安; 3. 東方電氣G50研發(fā)中心,610000,成都)
工業(yè)燃?xì)廨啓C(jī)[1]廣泛應(yīng)用于天然氣管道運(yùn)輸、發(fā)電、動(dòng)力驅(qū)動(dòng)、石油開(kāi)采、取暖等關(guān)系民生[2]的重要行業(yè)。燃?xì)廨啓C(jī)主要由壓氣機(jī)、燃燒室和渦輪3部分組成,其中渦輪是動(dòng)力輸出結(jié)構(gòu)。較航空燃?xì)廨啓C(jī),工業(yè)燃?xì)廨啓C(jī)應(yīng)用在地面,它的體積較大,輸出的功率較高,對(duì)于運(yùn)行穩(wěn)定性和工作壽命的要求也更高。
當(dāng)今較為成功的工業(yè)燃?xì)廨啓C(jī)主要有美國(guó)通用公司(GE)的LM2500、德國(guó)西門(mén)子(SIEMENS)的SGT-750等,工業(yè)燃?xì)廨啓C(jī)的國(guó)產(chǎn)化[3]是我國(guó)產(chǎn)業(yè)升級(jí)的重要一環(huán)。工業(yè)燃?xì)廨啓C(jī)大多采用雙軸結(jié)構(gòu),即壓縮機(jī)和高壓渦輪同軸,動(dòng)力渦輪與發(fā)電機(jī)或被驅(qū)動(dòng)機(jī)械同軸。由于空間限制和二次空氣系統(tǒng)的要求,動(dòng)力渦輪轉(zhuǎn)子一般設(shè)計(jì)為懸臂拉桿組合轉(zhuǎn)子[4],多級(jí)渦輪輪盤(pán)完全懸于支持軸承外,這對(duì)于轉(zhuǎn)子的強(qiáng)度[5]和穩(wěn)定性提出了更高的要求。由于工業(yè)燃?xì)廨啓C(jī)[6]造價(jià)高昂且尺寸大,難以直接開(kāi)展動(dòng)力學(xué)試驗(yàn)[7],因此以動(dòng)力學(xué)相似原理構(gòu)建等效縮比模型開(kāi)展動(dòng)力學(xué)研究十分有必要[8]。
達(dá)到動(dòng)力學(xué)相似的條件[9]是縮比模型與原始模型[10]的固有頻率、動(dòng)力學(xué)響應(yīng)特性和模態(tài)振型[11]等在工作轉(zhuǎn)速范圍內(nèi)一致或有固定比例,對(duì)于燃?xì)廨啓C(jī)動(dòng)力渦輪轉(zhuǎn)子[12],動(dòng)力學(xué)相似[13]需要滿足臨界轉(zhuǎn)速相似和模態(tài)振型一致。為實(shí)現(xiàn)動(dòng)力學(xué)相似,等效縮比模型與原始模型需要在3個(gè)方面相似[14]:結(jié)構(gòu)相似,保證縮比模型轉(zhuǎn)子各個(gè)軸段質(zhì)量分布和轉(zhuǎn)動(dòng)慣量空間分布一致;剛度相似,保證縮比模型轉(zhuǎn)子使用材料抗彎剛度與原始模型轉(zhuǎn)子抗彎剛度分布一致;邊界條件相似,保證支承位置一致,若采用不同的軸承類(lèi)型,剛度可以不一致。由于真實(shí)的動(dòng)力渦輪轉(zhuǎn)子往往含復(fù)雜結(jié)構(gòu)[15],因此如果嚴(yán)格按照幾何相似的原則建立縮比模型可能導(dǎo)致局部結(jié)構(gòu)強(qiáng)度不足且難以加工,所以動(dòng)力相似試驗(yàn)臺(tái)的設(shè)計(jì)應(yīng)該在符合動(dòng)力學(xué)相似的基礎(chǔ)上盡可能的簡(jiǎn)化幾何結(jié)構(gòu)。并且由于轉(zhuǎn)子的臨界轉(zhuǎn)速與幾何尺寸成反比,縮比系數(shù)的選取應(yīng)該適當(dāng)以避免動(dòng)力學(xué)試驗(yàn)中臨界轉(zhuǎn)速過(guò)高。
文獻(xiàn) [13]基于相似理論提出了一種高速轉(zhuǎn)子—支承結(jié)構(gòu)系統(tǒng)動(dòng)力學(xué)的縮尺相似設(shè)計(jì)方法,并通過(guò)建立轉(zhuǎn)子的“超模型”進(jìn)行有限元仿真計(jì)算驗(yàn)證了該方法的合理性。文獻(xiàn) [14]基于模型修正方法對(duì)航空燃?xì)廨啓C(jī)渦輪轉(zhuǎn)子縮比模型進(jìn)行修正,得到預(yù)測(cè)精度較高的動(dòng)力學(xué)相似模型。文獻(xiàn) [16]針對(duì)轉(zhuǎn)子系統(tǒng)不平衡特征再現(xiàn)設(shè)計(jì)問(wèn)題,提出一種基于動(dòng)力學(xué)相似關(guān)系的模型再現(xiàn)方法,并利用有限元計(jì)算驗(yàn)證了方法的正確性。
目前,國(guó)內(nèi)諸多類(lèi)似研究的對(duì)象大多為航空燃?xì)廨啓C(jī)轉(zhuǎn)子,并且驗(yàn)證方式采用有限元仿真計(jì)算的方法。本文針對(duì)某公司研發(fā)的工業(yè)燃?xì)廨啓C(jī)動(dòng)力渦輪轉(zhuǎn)子開(kāi)展動(dòng)力學(xué)特性研究,利用動(dòng)力學(xué)相似原理構(gòu)建縮比轉(zhuǎn)子試驗(yàn)臺(tái),進(jìn)行全轉(zhuǎn)速范圍試驗(yàn)和運(yùn)行穩(wěn)定性試驗(yàn);同時(shí),建立縮比轉(zhuǎn)子的三維模型,對(duì)其進(jìn)行模態(tài)和不平衡響應(yīng)的三維有限元仿真計(jì)算;最后,對(duì)比試驗(yàn)和計(jì)算結(jié)果,驗(yàn)證了動(dòng)力學(xué)相似試驗(yàn)轉(zhuǎn)子模型的準(zhǔn)確性和原始渦輪轉(zhuǎn)子模型設(shè)計(jì)的合理性,為類(lèi)似轉(zhuǎn)子系統(tǒng)的動(dòng)力學(xué)特性研究和設(shè)計(jì)提供了可靠的參考依據(jù)。
1 研究方法及模型
1.1 研究總體思路
本文通過(guò)建立某型工業(yè)燃?xì)廨啓C(jī)動(dòng)力渦輪動(dòng)力相似等效縮比轉(zhuǎn)子模型進(jìn)行動(dòng)力學(xué)特性研究,動(dòng)力渦輪工作轉(zhuǎn)速為3 075~6 457 r·min-1,根據(jù)原轉(zhuǎn)子動(dòng)力學(xué)特性,動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型需要保證第一階臨界轉(zhuǎn)速和第一階振型相似。
研究總體思路如圖1所示,主要分3步:構(gòu)建動(dòng)力渦輪原始模型、添加邊界條件、進(jìn)行模態(tài)仿真,得到的計(jì)算結(jié)果與企業(yè)提供的計(jì)算結(jié)果對(duì)比,以驗(yàn)證模態(tài)分析的準(zhǔn)確性;確定動(dòng)力相似關(guān)系,根據(jù)所給動(dòng)力渦輪參數(shù)得到動(dòng)力相似等效縮比轉(zhuǎn)子模型參數(shù)以及邊界條件,并同時(shí)建立動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型和相應(yīng)試驗(yàn)臺(tái);分別進(jìn)行動(dòng)力學(xué)特性有限元仿真計(jì)算和轉(zhuǎn)子動(dòng)力學(xué)特性試驗(yàn),并將所得仿真結(jié)果和試驗(yàn)結(jié)果進(jìn)行對(duì)比,并驗(yàn)證是否滿足第一階臨界轉(zhuǎn)速和第一階振型相似,如果仿真結(jié)果和試驗(yàn)結(jié)果不一致或不滿足相似要求,則需要調(diào)整動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型參數(shù),重新進(jìn)行設(shè)計(jì)研究。
1.2 數(shù)值研究方法及理論
1.2.1 動(dòng)力相似等效縮比模型的建立
本文主要針對(duì)臨界轉(zhuǎn)速和振型構(gòu)建相似關(guān)系[17],建立動(dòng)力渦輪轉(zhuǎn)子的振動(dòng)微分方程
(1)
式中:I為截面慣性矩;E為彈性模量;l為軸向長(zhǎng)度;γ為合成撓度;t為時(shí)間;ω為系統(tǒng)的固有頻率;Jρ為圓盤(pán)的極轉(zhuǎn)動(dòng)慣量;m為轉(zhuǎn)子的質(zhì)量;p為轉(zhuǎn)子中不平衡力的強(qiáng)度。
沿轉(zhuǎn)子軸中心線的傾角α和法向應(yīng)力σ分別為
(2)
式中:W為抗彎截面系數(shù);M為彎矩。
由式(1)、(2)推導(dǎo)出相似準(zhǔn)則的π系數(shù)群為
(3)
式(3)中各個(gè)變量的因次之間關(guān)系為
(4)
將式(4)代入式(3),得到簡(jiǎn)化的π系數(shù)群
(5)
為了實(shí)現(xiàn)縮比模型和原始模型的動(dòng)力學(xué)相似[18],則必須保證它們相應(yīng)的π值相等。由于本文主要以轉(zhuǎn)子的一階臨界轉(zhuǎn)速和一階振型為動(dòng)力相似的標(biāo)準(zhǔn),根據(jù)式(5)可以得到動(dòng)力相似等效縮比模型和原始模型質(zhì)量m、剛度k和臨界轉(zhuǎn)速ωn的等效縮比關(guān)系式[19]為
(6)
式中:Kd為直徑縮比系數(shù);Kl為軸向長(zhǎng)度縮比系數(shù);KE為彈性模量縮比系數(shù);Kρ為密度縮比系數(shù)。
1.2.2 動(dòng)力相似等效縮比模型的評(píng)估
建立的動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型[20]需要進(jìn)行評(píng)估以驗(yàn)證建模的準(zhǔn)確性,針對(duì)臨界轉(zhuǎn)速的相似程度[21]使用相對(duì)誤差Es來(lái)進(jìn)行評(píng)估
(7)
式中:ωm為動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型臨界轉(zhuǎn)速,r·min-1;Kω為臨界轉(zhuǎn)速縮比系數(shù);ωp為原始模型臨界轉(zhuǎn)速,r·min-1。
本文通過(guò)建立動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型[21]來(lái)檢驗(yàn)原始渦輪轉(zhuǎn)子模型設(shè)計(jì)的合理性,所以使用API 612高速動(dòng)平衡[22-24]標(biāo)準(zhǔn)來(lái)驗(yàn)證轉(zhuǎn)子運(yùn)行的安全性。
API 612懸臂端許用不平衡量為
(8)
式中:m1為懸臂端質(zhì)量,g;n為轉(zhuǎn)速,r·min-1。
API 612允許轉(zhuǎn)子懸臂端軸承座附近最大不平衡響應(yīng)峰-峰值振幅為
(9)
式中:N為最大運(yùn)行轉(zhuǎn)速,r·min-1。
本文以轉(zhuǎn)子各階固有頻率的對(duì)數(shù)衰減率δ是否大于0.2為運(yùn)行穩(wěn)定性標(biāo)準(zhǔn)[25]。Q因子是無(wú)量綱量,Q因子大表示振動(dòng)模態(tài)的阻尼小,共振峰尖銳。Q因子與模態(tài)阻尼比ζ和對(duì)數(shù)衰減率δ的關(guān)系為
(10)
Qδ≈π
(11)
計(jì)算模態(tài)阻尼比ζ最常用的方法為半功率帶寬法。半功率帶寬法是在自振頻譜圖上對(duì)每一階自振頻率采用半功率點(diǎn)帶寬求取阻尼參數(shù)的方法,其理論計(jì)算式為
(12)
式中:f0為系統(tǒng)固有頻率;f1、f2為半功率點(diǎn)頻率。
1.2.3 動(dòng)力學(xué)仿真計(jì)算網(wǎng)格模型和邊界條件
本文選取動(dòng)力相似試驗(yàn)轉(zhuǎn)子的材料為40Cr,密度比原渦輪轉(zhuǎn)子使用的IN718略小,密度縮比系數(shù)Kρ=0.94,彈性模量縮比系數(shù)KE=1,軸向長(zhǎng)度縮比系數(shù)Kl=0.25,直徑縮比系數(shù)Kd=0.15,其余各物理量縮比關(guān)系如表1所示。

表1 動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型和原始渦輪轉(zhuǎn)子模型各物理量縮比關(guān)系
根據(jù)所得縮比系數(shù)和原始渦輪的參數(shù)可以求得動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型的具體參數(shù),其中動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型與原始模型的跨外和跨內(nèi)質(zhì)量比均約為2.1,懸臂端靜撓度均為54 μm,表2為原始模型和動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型相關(guān)參數(shù)對(duì)比。
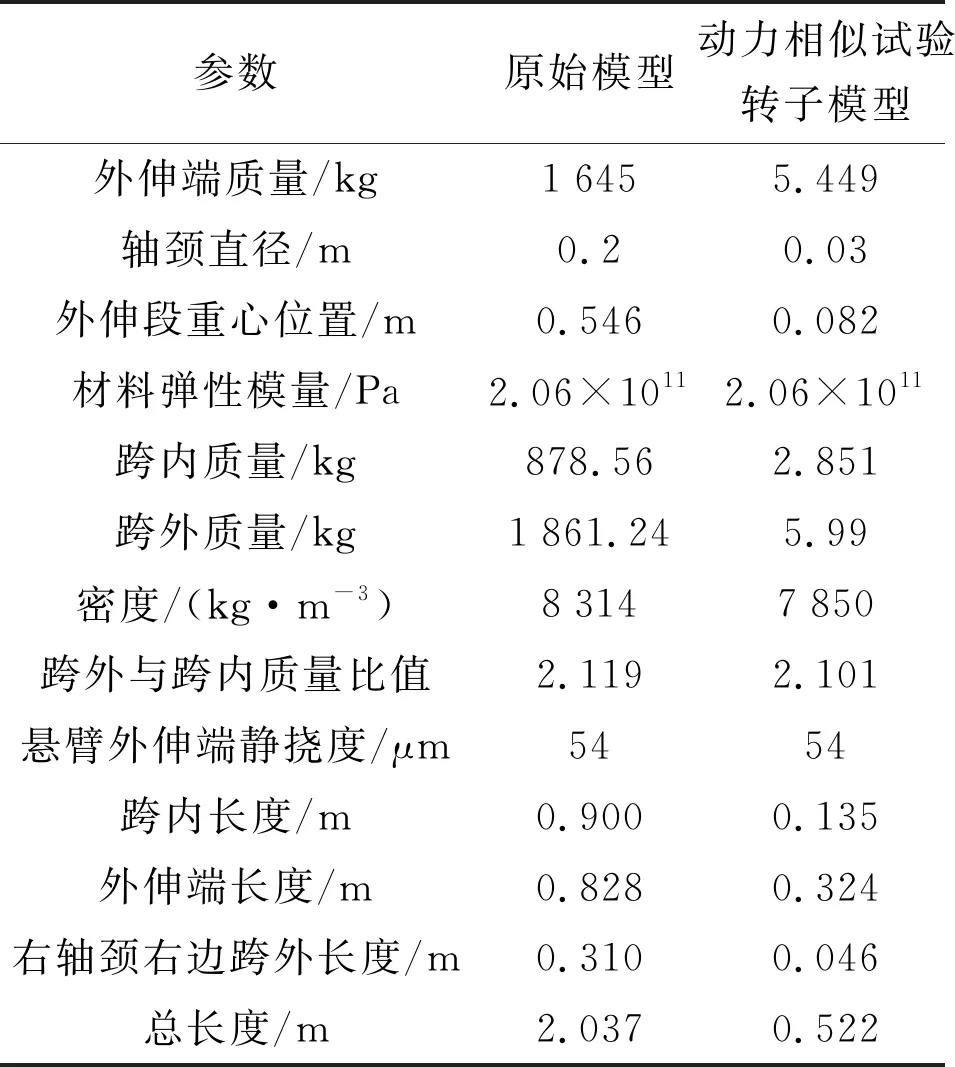
表2 動(dòng)力相似縮比轉(zhuǎn)子模型和原始渦輪轉(zhuǎn)子模型相關(guān)參數(shù)對(duì)比
原始動(dòng)力渦輪轉(zhuǎn)子結(jié)構(gòu)示意圖如圖2所示,邊界條件為進(jìn)氣側(cè)軸承座剛度5×108N/m,排氣側(cè)軸承座剛度為5×107N/m。其軸承為可傾瓦軸承,而本試驗(yàn)中為圓軸承,所以本文的試驗(yàn)和仿真計(jì)算施加的邊界條件為兩軸承座剛度均為8×106N/m。

圖2 原始動(dòng)力渦輪轉(zhuǎn)子結(jié)構(gòu)Fig.2 Original power turbine rotor structure
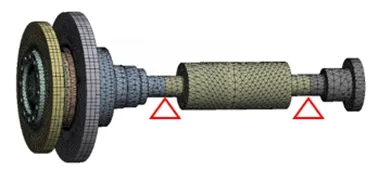
使用三維有限元仿真軟件ANSYS按照計(jì)算所得的幾何參數(shù)建立動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型,并使用ICEM對(duì)所得轉(zhuǎn)子模型進(jìn)行網(wǎng)格劃分,網(wǎng)格類(lèi)型為六面體網(wǎng)格,網(wǎng)格數(shù)為54 623,節(jié)點(diǎn)數(shù)為21 457,三角形標(biāo)志處為軸承支承位置,如圖3所示。

(a)幾何模型

(b)三維有限元網(wǎng)格模型
1.2.4 動(dòng)力相似試驗(yàn)研究方法
根據(jù)動(dòng)力相似準(zhǔn)則建立動(dòng)力相似試驗(yàn)臺(tái),試驗(yàn)臺(tái)包括動(dòng)力相似試驗(yàn)轉(zhuǎn)子系統(tǒng)、測(cè)量系統(tǒng)和軸承潤(rùn)滑油路系統(tǒng)。動(dòng)力相似試驗(yàn)轉(zhuǎn)子系統(tǒng)包括跨外懸臂輪盤(pán)、跨內(nèi)輪盤(pán)、軸承座和直流驅(qū)動(dòng)電機(jī);測(cè)量系統(tǒng)包括位移測(cè)量、轉(zhuǎn)速測(cè)量和溫度測(cè)量;油路循環(huán)包括油泵、輸油管和油箱。動(dòng)力相似試驗(yàn)轉(zhuǎn)子模化試驗(yàn)臺(tái)如圖4所示。

圖4 動(dòng)力相似試驗(yàn)轉(zhuǎn)子模化試驗(yàn)臺(tái)Fig.4 Dynamic similarity test rotor modeling test bench
動(dòng)力相似試驗(yàn)轉(zhuǎn)子模化試驗(yàn)臺(tái)的測(cè)量系統(tǒng)共包括6個(gè)位移傳感器、一個(gè)轉(zhuǎn)速傳感器和兩個(gè)溫度傳感器。位移傳感器和轉(zhuǎn)速傳感器均使用中航科技公司生產(chǎn)的ZA-21系列電渦流傳感器,適配直徑3 mm探頭,最大量程500 μm,標(biāo)準(zhǔn)靈敏度20.000 V/mm,使用±15 V供電電源;溫度傳感器使用PT100型熱電阻溫度傳感器,用于測(cè)量靠近懸臂端的軸承軸瓦溫度。信號(hào)采集器使用FOCUS Ⅱ高精度測(cè)試系統(tǒng),頻率精度在0.01%以內(nèi),信號(hào)處理使用RT Pro動(dòng)態(tài)信號(hào)分析處理軟件。動(dòng)力系統(tǒng)使用額定功率750 W直流電機(jī),最大轉(zhuǎn)速為7 000 r·min-1,大于原始渦輪轉(zhuǎn)子最大工作轉(zhuǎn)速6 457 r·min-1。試驗(yàn)轉(zhuǎn)子采用內(nèi)直徑30 mm、外直徑100 mm的輪盤(pán)進(jìn)行配重,每個(gè)輪盤(pán)上均有等角度分布的12個(gè)直徑5 mm的平衡孔用于進(jìn)行轉(zhuǎn)子高速動(dòng)平衡。通過(guò)計(jì)算,轉(zhuǎn)子懸臂端跨外部分安裝70 mm厚輪盤(pán)、跨內(nèi)部分安裝2個(gè)10 mm厚輪盤(pán)和1個(gè)20 mm厚輪盤(pán),此時(shí)懸臂端靜撓度為54 μm,試驗(yàn)臺(tái)傳感器測(cè)點(diǎn)安裝位置和輪盤(pán)質(zhì)量分布如圖5所示。

圖5 動(dòng)力相似轉(zhuǎn)子試驗(yàn)臺(tái)布置示意圖Fig.5 Layout diagram of dynamic similar test bench
試驗(yàn)主要包括升速試驗(yàn)和穩(wěn)定運(yùn)行試驗(yàn)。升速試驗(yàn)的目的是通過(guò)對(duì)動(dòng)力相似試驗(yàn)轉(zhuǎn)子施加不同動(dòng)平衡標(biāo)準(zhǔn)下的不平衡量來(lái)測(cè)量全轉(zhuǎn)速范圍內(nèi)轉(zhuǎn)子振動(dòng)響應(yīng)峰-峰值;穩(wěn)定運(yùn)行試驗(yàn)則是在施加了一定的不平衡量下,檢驗(yàn)轉(zhuǎn)子能否在臨界轉(zhuǎn)速附近長(zhǎng)期穩(wěn)定運(yùn)行。
2 結(jié)果與討論
2.1 原始動(dòng)力渦輪轉(zhuǎn)子的動(dòng)力學(xué)特性分析
首先對(duì)原始動(dòng)力渦輪轉(zhuǎn)子進(jìn)行有限元模態(tài)仿真計(jì)算并將所得結(jié)果與企業(yè)所給報(bào)告結(jié)果對(duì)比,確定原始模型的臨界轉(zhuǎn)速。使用UG軟件建立原始動(dòng)力渦輪轉(zhuǎn)子模型,使用ICEM軟件對(duì)模型進(jìn)行網(wǎng)格劃分,網(wǎng)格類(lèi)型為六面體,網(wǎng)格數(shù)為188萬(wàn),節(jié)點(diǎn)數(shù)為140萬(wàn),圖6中紅色三角處為軸承約束的位置。
使用ANSYS有限元仿真軟件對(duì)原始渦輪轉(zhuǎn)子進(jìn)行模態(tài)仿真分析,表3為模態(tài)仿真計(jì)算結(jié)果與企業(yè)所給計(jì)算結(jié)果的對(duì)比,可知仿真計(jì)算結(jié)果相對(duì)誤差均在4.9%以內(nèi),說(shuō)明臨界轉(zhuǎn)速計(jì)算結(jié)果可信。

(a)幾何模型
(b)網(wǎng)格模型
圖7為有限元仿真計(jì)算所得各階臨界轉(zhuǎn)速的模態(tài)振型,其中第一階振型為外伸端剛體擺振、第二階振型為右端擺振、第三階振型為跨內(nèi)一階彎曲。根據(jù)動(dòng)力渦輪工作轉(zhuǎn)速范圍和企業(yè)要求,動(dòng)力相似的參考標(biāo)準(zhǔn)為第一階臨界轉(zhuǎn)速是否成比例和第一階振型是否為外伸端剛體擺振。由1.2.3節(jié)可知固有頻率的縮比系數(shù)為2.05,故動(dòng)力相似試驗(yàn)轉(zhuǎn)子的第一階臨界轉(zhuǎn)速應(yīng)在3 200 r·min-1左右。
(a)第一階臨界轉(zhuǎn)速為1 641 r·min-1(外伸端擺振)

(b)第二階臨界轉(zhuǎn)速為3 665 r·min-1(右端擺振)

(c)第三階臨界轉(zhuǎn)速為13 017 r·min-1(跨內(nèi)一階彎曲)
2.2 動(dòng)力相似等效縮比轉(zhuǎn)子模型動(dòng)力學(xué)特性計(jì)算
使用ANSYS有限元仿真軟件對(duì)動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型進(jìn)行模態(tài)仿真計(jì)算,施加邊界條件:前、后軸承座剛度均為8×106N·m。模態(tài)分析結(jié)果如圖8所示,可知:第一階臨界轉(zhuǎn)速為3 120 r·min-1,振型為外伸端擺振;第二階臨界轉(zhuǎn)速20 574 r·min-1,振型為右端擺振;第三階臨界轉(zhuǎn)速33 240 r·min-1,振型為跨內(nèi)第一階彎曲。

(a)第一階臨界轉(zhuǎn)速為3 120 r·min-1(外伸端擺振)
(b)第二階臨界轉(zhuǎn)速為20 574 r·min-1(右端擺振)

(c)第三階臨界轉(zhuǎn)速為30 120 r·min-1(跨內(nèi)一階彎曲)
使用ANSYS Workbench軟件的Harmonic response analysis模塊對(duì)動(dòng)力相似試驗(yàn)轉(zhuǎn)子進(jìn)行不平衡響應(yīng)分析。由于轉(zhuǎn)子的第一階彎曲振型為跨內(nèi)第一階彎曲,對(duì)應(yīng)的臨界轉(zhuǎn)速遠(yuǎn)大于最大工作轉(zhuǎn)速6 457 r·min-1,所以該轉(zhuǎn)子屬于剛性轉(zhuǎn)子,在加載不平衡量時(shí)采用剛性轉(zhuǎn)子的標(biāo)準(zhǔn)。
使用API 612動(dòng)平衡標(biāo)準(zhǔn),由式(8)計(jì)算得轉(zhuǎn)子需施加的標(biāo)準(zhǔn)不平衡量為5.36 g·mm,邊界條件不變,添加不平衡量示意圖如圖9所示,不平衡響應(yīng)結(jié)果如圖10所示。

圖9 動(dòng)力相似模化轉(zhuǎn)子試驗(yàn)臺(tái)添加不平衡量示意圖Fig.9 Schematic diagram of adding unbalance on dynamic similarity model rotor test bed

(a)動(dòng)力相似試驗(yàn)轉(zhuǎn)子振幅頻率響應(yīng)圖

(b)動(dòng)力相似試驗(yàn)轉(zhuǎn)子相位頻率響應(yīng)圖
由圖10可知,動(dòng)力相似試驗(yàn)轉(zhuǎn)子在工作轉(zhuǎn)速內(nèi)、動(dòng)平衡標(biāo)準(zhǔn)為API 612時(shí)外伸端軸承座附近最大響應(yīng)峰-峰值為11 μm。根據(jù)式(9)可知,最大轉(zhuǎn)速為6 457 r·min-1時(shí),API 612標(biāo)準(zhǔn)允許最大峰-峰值為33 μm,說(shuō)明動(dòng)力相似試驗(yàn)轉(zhuǎn)子在工作轉(zhuǎn)速區(qū)間內(nèi)符合安全標(biāo)準(zhǔn)。
2.3 動(dòng)力相似等效縮比轉(zhuǎn)子模型動(dòng)力學(xué)特性試驗(yàn)
使用搭建的動(dòng)力相似試驗(yàn)臺(tái)開(kāi)展動(dòng)力學(xué)特性試驗(yàn),分別開(kāi)展升速試驗(yàn)和穩(wěn)定運(yùn)行試驗(yàn)。試驗(yàn)轉(zhuǎn)子共設(shè)置3個(gè)測(cè)點(diǎn),測(cè)點(diǎn)1位于跨內(nèi)段近電機(jī)端軸承處、測(cè)點(diǎn)2位于跨內(nèi)段近外伸端軸承處、測(cè)點(diǎn)3位于外伸段處,每個(gè)測(cè)點(diǎn)分別在水平方向與垂直方向布置電渦流位移傳感器,以實(shí)現(xiàn)試驗(yàn)轉(zhuǎn)子響應(yīng)幅值的測(cè)量。為了減少試驗(yàn)開(kāi)始時(shí)油溫不穩(wěn)定導(dǎo)致的轉(zhuǎn)子振幅變化,本節(jié)試驗(yàn)中電機(jī)端軸承和外伸端軸承均采用油泵供油,同時(shí)在每組試驗(yàn)進(jìn)行前完成數(shù)分鐘的低速盤(pán)車(chē)以對(duì)試驗(yàn)臺(tái)進(jìn)行預(yù)熱。
升速試驗(yàn)使用的動(dòng)平衡標(biāo)準(zhǔn)有G0.4、G1.0、G2.5和API 612,不同動(dòng)平衡標(biāo)準(zhǔn)下需要施加的不平衡量如表4所示。在進(jìn)行試驗(yàn)前首先需要進(jìn)行高速動(dòng)平衡,確保轉(zhuǎn)子的剩余不平衡量盡可能地小。經(jīng)過(guò)計(jì)算,試驗(yàn)轉(zhuǎn)子經(jīng)過(guò)高速動(dòng)平衡后的剩余不平衡量為4.88 g·mm,優(yōu)于動(dòng)平衡標(biāo)準(zhǔn)G0.4。施加不平衡量具體數(shù)值如表5所示。

表4 動(dòng)力相似試驗(yàn)轉(zhuǎn)子不同高速動(dòng)平衡標(biāo)準(zhǔn)下的許用不平衡量

表5 動(dòng)力相似試驗(yàn)轉(zhuǎn)子各試驗(yàn)組許用不平衡量和實(shí)際不平衡量對(duì)比
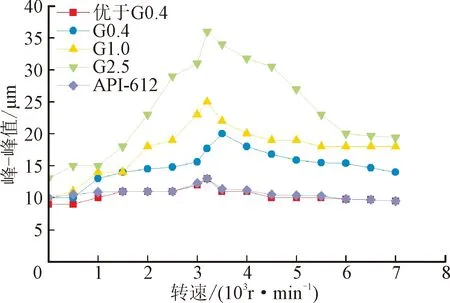
升速試驗(yàn)過(guò)程中環(huán)境溫度約為20℃,進(jìn)油溫度為17℃,進(jìn)油壓力0.15 MPa。試驗(yàn)中轉(zhuǎn)子轉(zhuǎn)速最高升至7 000 r·min-1,各測(cè)點(diǎn)升速過(guò)程中轉(zhuǎn)速-響應(yīng)幅值關(guān)系線如圖11所示。當(dāng)動(dòng)力相似試驗(yàn)轉(zhuǎn)子采用G2.5的動(dòng)平衡標(biāo)準(zhǔn)時(shí),轉(zhuǎn)子在升速過(guò)程中最大響應(yīng)峰-峰值位于測(cè)點(diǎn)1垂直方向,大小為70 μm。按照工業(yè)燃?xì)廨啓C(jī)的運(yùn)行標(biāo)準(zhǔn),轉(zhuǎn)子工作轉(zhuǎn)速內(nèi)的最大響應(yīng)峰-峰值小于128 μm時(shí),視為運(yùn)轉(zhuǎn)情況良好,因此動(dòng)力相似試驗(yàn)轉(zhuǎn)子符合安全規(guī)定。同時(shí),當(dāng)動(dòng)力相似試驗(yàn)轉(zhuǎn)子采用API 612動(dòng)平衡標(biāo)準(zhǔn)時(shí),懸臂端最大響應(yīng)峰-峰值為12 μm,小于API 612標(biāo)準(zhǔn)規(guī)定的最大峰-峰值為33 μm,說(shuō)明試驗(yàn)轉(zhuǎn)子的懸臂端設(shè)計(jì)合理,符合安全標(biāo)準(zhǔn)。
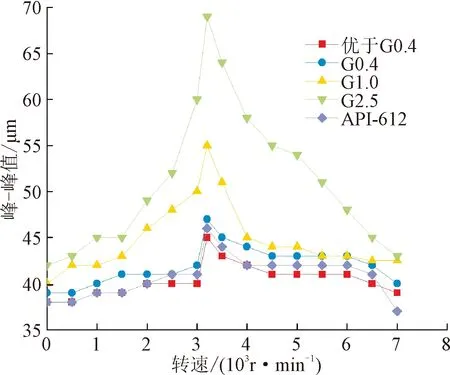
(a)測(cè)點(diǎn)1垂直方向

(b)測(cè)點(diǎn)1水平方向

(c)測(cè)點(diǎn)2垂直方向

(d) 測(cè)點(diǎn)3水平方向

(e)測(cè)點(diǎn)3垂直方向
(f)測(cè)點(diǎn)3水平方向
各個(gè)動(dòng)平衡標(biāo)準(zhǔn)下升速過(guò)程中的轉(zhuǎn)子臨界轉(zhuǎn)速如表6所示,可知轉(zhuǎn)子的一階臨界轉(zhuǎn)速分布在3 100~3 300 r·min-1區(qū)間內(nèi),取API 612動(dòng)平衡標(biāo)準(zhǔn)下的一階臨界轉(zhuǎn)速3 266 r·min-1作為試驗(yàn)測(cè)得一階臨界轉(zhuǎn)速值。動(dòng)力相似試驗(yàn)轉(zhuǎn)子的最大響應(yīng)峰-峰值均位于測(cè)點(diǎn)1處,懸臂端最大響應(yīng)峰-峰值為36 μm,完全符合安全穩(wěn)定運(yùn)行標(biāo)準(zhǔn)。

表6 不同動(dòng)平衡標(biāo)準(zhǔn)下測(cè)得的動(dòng)力相似試驗(yàn)轉(zhuǎn)子第一階臨界轉(zhuǎn)速
由于原始渦輪轉(zhuǎn)子的工作轉(zhuǎn)速為3 075~6 457 r·min-1,而動(dòng)力相似試驗(yàn)轉(zhuǎn)子的第一階臨界轉(zhuǎn)速為3 266 r·min-1,位于工作轉(zhuǎn)速范圍內(nèi),這意味著轉(zhuǎn)子在運(yùn)行過(guò)程中需要在接近該臨界轉(zhuǎn)速長(zhǎng)時(shí)間平穩(wěn)運(yùn)行。因此,將施加動(dòng)平衡標(biāo)準(zhǔn)G2.5不平衡量的試驗(yàn)轉(zhuǎn)子轉(zhuǎn)速維持在3 266 r·min-1附近約1 h,轉(zhuǎn)子可以在第一階臨界轉(zhuǎn)速附近長(zhǎng)期穩(wěn)定運(yùn)行,試驗(yàn)過(guò)程中響應(yīng)峰-峰值曲線未出現(xiàn)大幅波動(dòng),如圖12所示。

(a)轉(zhuǎn)子運(yùn)行轉(zhuǎn)速隨時(shí)間變化
2.4 動(dòng)力相似等效縮比轉(zhuǎn)子模型的驗(yàn)證
對(duì)動(dòng)力相似等效縮比轉(zhuǎn)子模型的有效性進(jìn)行驗(yàn)證,動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型的第一階臨界轉(zhuǎn)速的有限元仿真計(jì)算結(jié)果和試驗(yàn)結(jié)果相對(duì)誤差小于4.5%,說(shuō)明所得臨界轉(zhuǎn)速結(jié)果可靠。如表7所示,動(dòng)力相似試驗(yàn)轉(zhuǎn)子的一階臨界轉(zhuǎn)速與原始渦輪轉(zhuǎn)子模型的一階臨界轉(zhuǎn)速比值大約為2.05,說(shuō)明本文所建動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型可有效預(yù)測(cè)原始渦輪轉(zhuǎn)子模型的臨界轉(zhuǎn)速。
對(duì)原始渦輪轉(zhuǎn)子模型和動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型進(jìn)行運(yùn)行穩(wěn)定性評(píng)估,由表8可知,兩轉(zhuǎn)子的固有頻率對(duì)數(shù)衰減率均大于0.2,說(shuō)明原始動(dòng)力渦輪轉(zhuǎn)子模型和動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型均可滿足穩(wěn)定運(yùn)行的要求,轉(zhuǎn)子設(shè)計(jì)安全可靠。

表8 原始動(dòng)力渦輪轉(zhuǎn)子模型和動(dòng)力相似試驗(yàn)轉(zhuǎn)子的穩(wěn)定性評(píng)估

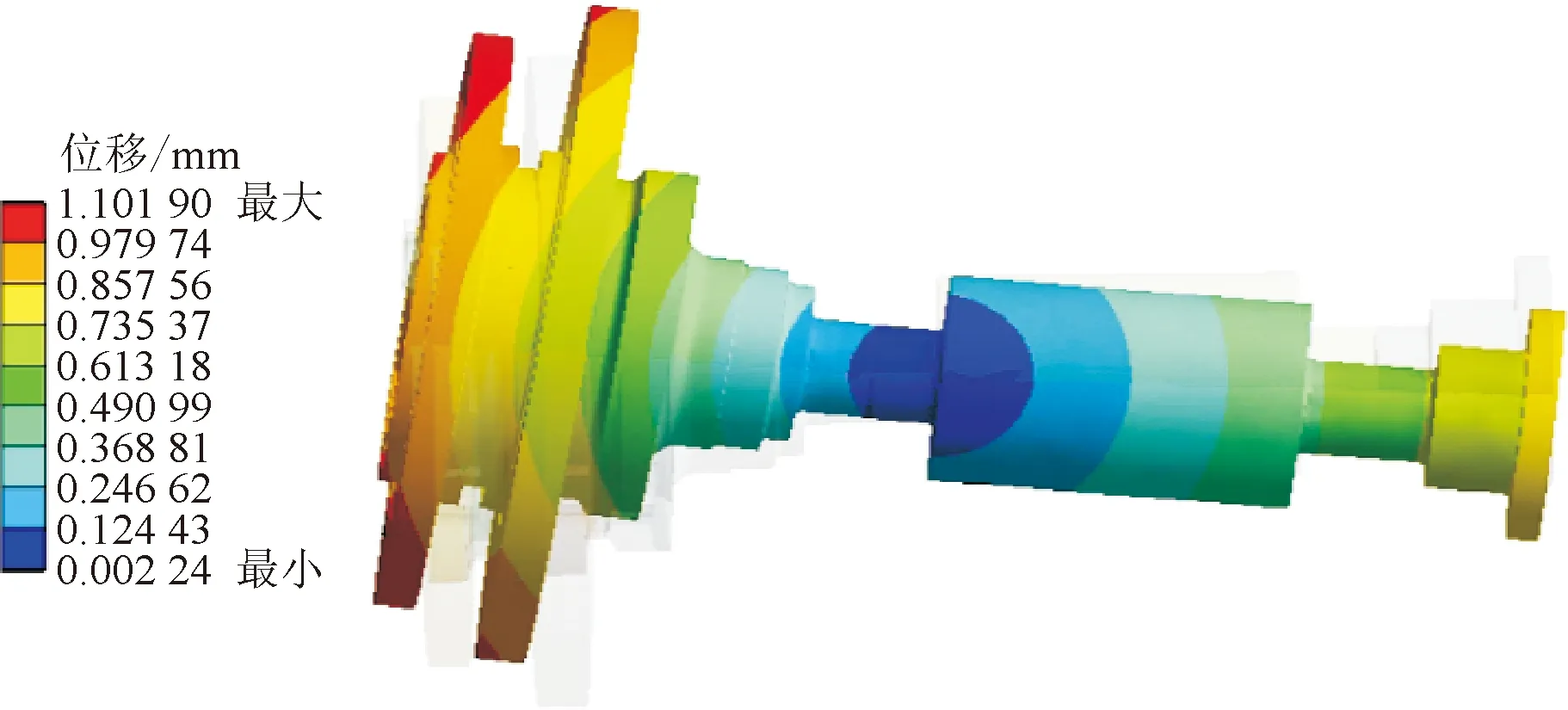
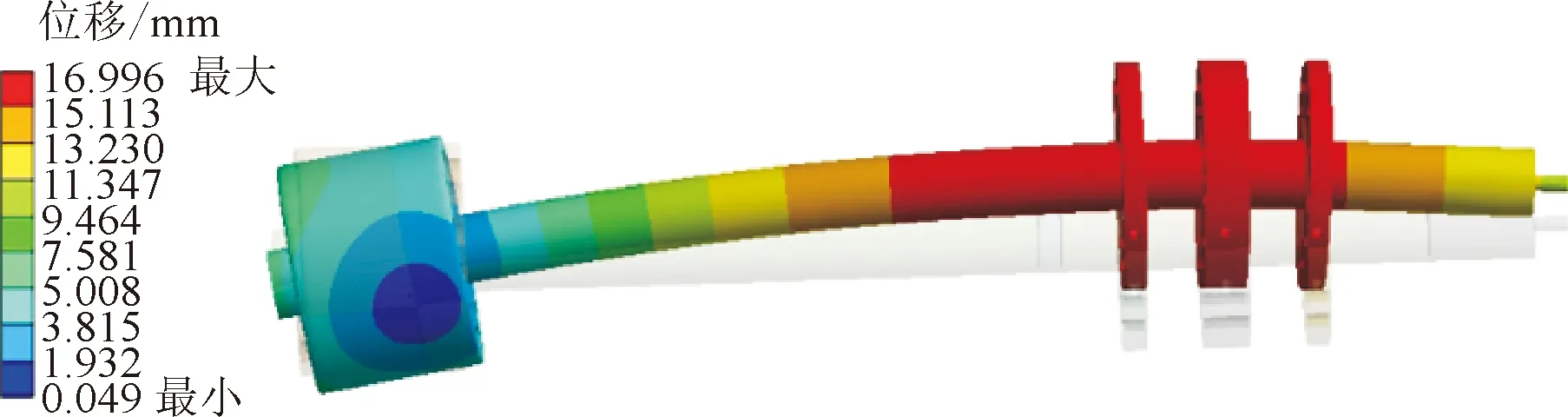
圖13 原始模型和動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型一階臨界轉(zhuǎn)速應(yīng)變能分布Fig.13 Distribution of strain energy at the first critical speed of the original model and the dynamic similarity model
圖13為原始動(dòng)力渦輪轉(zhuǎn)子模型和動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型在第一階臨界轉(zhuǎn)速時(shí)應(yīng)變能的分布,由圖13可知,原始動(dòng)力渦輪轉(zhuǎn)子第一階臨界轉(zhuǎn)速時(shí)的應(yīng)變能主要分布在懸臂端軸承座附近。其中,原始動(dòng)力渦輪轉(zhuǎn)子模型在懸臂端軸承座附近的應(yīng)變能占總應(yīng)變能的比例為80.5%,動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型為77.6%,而轉(zhuǎn)子部分的應(yīng)變能占比分別為11.2%和15.3%。說(shuō)明動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型可以較好地預(yù)測(cè)原始渦輪轉(zhuǎn)子模型的應(yīng)變能分布,所產(chǎn)生的誤差應(yīng)為結(jié)構(gòu)簡(jiǎn)化所致。
3 結(jié) 論
本文針對(duì)某型燃?xì)廨啓C(jī)動(dòng)力渦輪轉(zhuǎn)子提出了一種試驗(yàn)與仿真相對(duì)照的動(dòng)力相似設(shè)計(jì)方法,并得出如下結(jié)論。
(1)本文所建動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型可以有效預(yù)測(cè)原始渦輪轉(zhuǎn)子模型的臨界轉(zhuǎn)速,動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型前三階臨界轉(zhuǎn)速的有限元仿真計(jì)算結(jié)果和試驗(yàn)結(jié)果相對(duì)誤差小于4.5%,并且都約為原始模型的2.05倍,符合動(dòng)力相似準(zhǔn)則。
(2)動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型和原始渦輪轉(zhuǎn)子模型的固有頻率對(duì)數(shù)衰減率δ均大于0.2,且動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型可以在臨界轉(zhuǎn)速附近長(zhǎng)時(shí)間穩(wěn)定運(yùn)行,說(shuō)明無(wú)論是原始模型還是動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型均滿足穩(wěn)定性的要求。
(3)動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型在施加API 612動(dòng)平衡標(biāo)準(zhǔn)所要求的標(biāo)準(zhǔn)不平衡量時(shí),有限元仿真和試驗(yàn)結(jié)果所得到的懸臂端附近最大響應(yīng)峰-峰值相對(duì)誤差為1.6%,且均小于規(guī)定的最大值33 μm,說(shuō)明轉(zhuǎn)子滿足安全性的要求。
(4)動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型和原始渦輪轉(zhuǎn)子模型在第一階臨界轉(zhuǎn)速時(shí)的應(yīng)變能分布幾乎一致,說(shuō)明動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型可以較好地預(yù)測(cè)原始轉(zhuǎn)子模型的應(yīng)變能分布。
燃?xì)廨啓C(jī)相比航空燃?xì)廨啓C(jī)尺寸更大、質(zhì)量更重,因此直接對(duì)原始轉(zhuǎn)子進(jìn)行動(dòng)力學(xué)研究成本過(guò)高。本文成功構(gòu)建了原始渦輪轉(zhuǎn)子模型的動(dòng)力相似試驗(yàn)轉(zhuǎn)子模型,對(duì)于類(lèi)似轉(zhuǎn)子的試驗(yàn)設(shè)計(jì)研究具有參考價(jià)值和現(xiàn)實(shí)意義。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學(xué)學(xué)報(bào)(2019年6期)2019-08-13 07:04:32
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24