一種用于沙障鋪設的機器人設計*
2023-11-03 08:49:06肖景強王宇林陳嘉俊曾駿暉吳彥夫
南方農機 2023年22期
肖景強 ,王宇林 ,陳嘉俊 ,曾駿暉 ,吳彥夫
(廣東海洋大學機械工程學院,廣東 湛江 524088)
荒漠化是當前人類面臨的重大生態問題,就目前國內荒漠化程度來說,我國是世界上荒漠化面積大、分布范圍廣、危害嚴重的國家之一。長此以往會對處于荒漠化附近的居民造成嚴重的經濟損失,在其生活起居上也會有嚴重的影響。而目前國內的固沙設備相對落后,缺乏較為自動化、智能化的固沙設備[1]。本文根據荒漠化固沙設備的問題設計了一種用于沙漠治理的智能固沙機器人,該機器具有人工操作和智能操作兩種模式,能夠高效地規劃草方格的種插路徑,使得種插的覆蓋面積更為合理。其目的是減少人力成本的投入,提高種插草方格的效率,為荒漠地帶的綠植恢復奠定基礎。
1 整體結構設計及工作原理
沙障鋪設機器人整體結構設計如圖1所示。機器人的結構組成包括行走機構、傳送機構、軋草機構、視覺識別裝置、激光雷達檢測裝置、主控裝置、整體機架等[2]。該機器人主要用于荒漠化地區防風固沙的沙障鋪設工作。在實際工作時,駕駛機器的工作人員通過遙控設備到達預設的工作區域,設備將會通過GPS定位模塊檢測設備當前的位置坐標,并且預設下一個目標點的坐標。在起始點和目標點之間各自建立一個關于x軸、y軸的坐標系,并且兩個坐標系軸線延長相交,劃定出設備的工作區域。上位機Jetson Nano通過激光雷達及視覺攝像頭進行全圖掃描,建立起一張柵格地圖,掃過的區域里面對有障礙物的區域柵格設定為1,待工作區域設定為0,通過Boustrophedon算法及雙向搜索算法為設備規劃一條最優的路線。設備經過待工作區域0后將該區域設定為已工作區域,標志為1。待整個柵格地圖所有柵格區域都為1后,設備在該區域的工作完成。然后,該機器人將以當前區域的目標點作為起始點,再次規劃工作區域,對附近的區域進行鐵軌式的沙障方格鋪設。
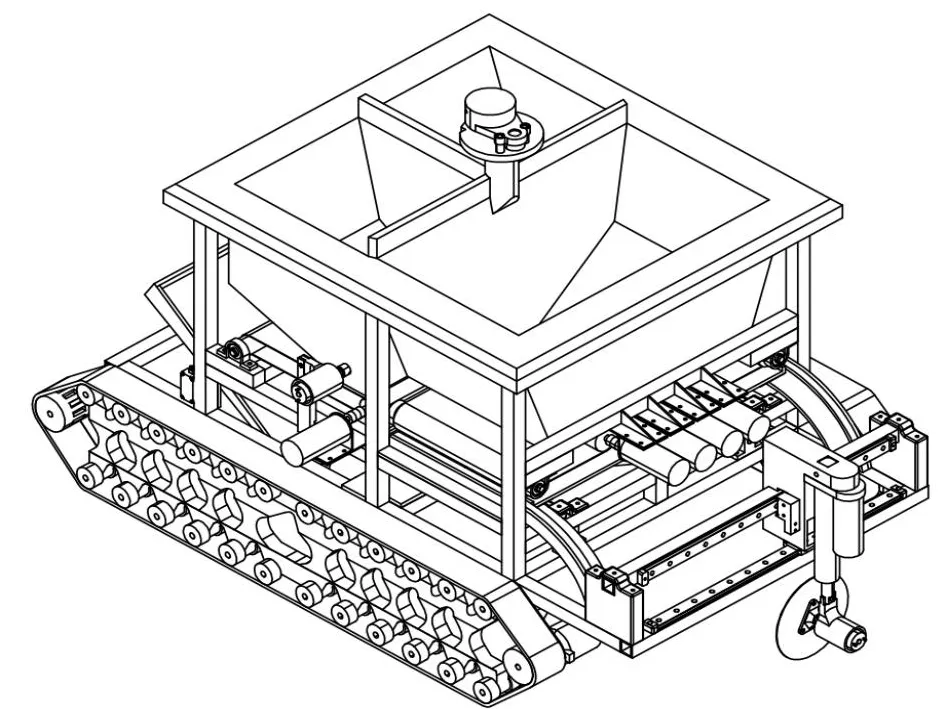
圖1 沙障鋪設機器人整體結構
2 主要裝置結構設計
2.1 橫向送草裝置設計
橫向送草機構如圖2所示,其主要由步進電機、同步帶、傳送帶、取料排槽滾軸、電機、聯軸器、折板等構成[3]。設備在取料時,中間一組彼此嚙合的排槽齒會將秸稈從秸稈儲料倉中卷出,由于取料排槽滾軸的快速轉動,秸稈會被甩到鋪平的折板上,并且折板和取料滾軸之間存在6 cm的間隙,秸稈堆疊過多后會在傳送帶的作用下,均勻橫向地平鋪在折板上。待鋪勻后,步進電機會帶動同步帶將折板沿著特定的彎形軌道推出,使得折板平面變為折板曲面,并在軌道的終點處將觸碰開關閉合,折板到達預設行程點。折板曲面上的秸稈由于接觸摩擦不足,滑落至預設區域,被下方攝像頭識別到后折板曲面收回,至此完成送草動作。

圖2 橫向送草機構
2.2 橫向軋草裝置設計
橫向軋草機構如圖3所示,其主要由軋草輪、聯軸器、減速電機、電動推桿、滑塊、電動推桿固定架等組成。當設備尾部的底部支架攝像頭檢測到橫排秸稈對象時,電動推桿伸長推桿給軋草輪下壓力。軋草輪在電機的轉動下拖著滑塊在滑軌上移動,橫排的秸稈在軋草輪的壓力作用下豎立起來,當電動推桿固定架左右兩邊的觸碰開關先后往復觸碰到后,標記軋草動作已經完成。此時,橫向秸稈已經全部豎立起來,設備將繼續執行向前直走命令。

圖3 橫向軋草機構
2.3 縱向送草裝置設計
縱向送草機構如圖4所示,其主要由舵機、引料板、傳送帶、取料排槽滾軸、聯軸器、執行電機等組成[4]。設備在取料時,取料排槽滾軸的電機開始轉動,并將儲料倉內的秸稈通過一條10 cm寬的裂縫依次卷出。由于電機轉動之后秸稈會掉落到傳送帶上,在傳送帶的作用下秸稈到達預定的槽口下方,然后將秸稈排列好,等待縱向軋草裝置將其軋立起來。
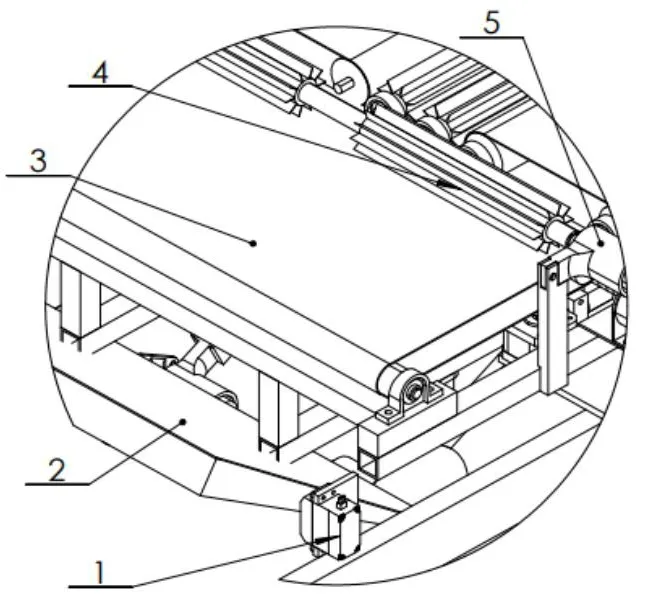
圖4 縱向送草機構
2.4 縱向軋草裝置設計
縱向軋草機構如圖5所示,其主要由軋草輪、電機、軋草力臂、電動推桿等組成。設備在縱向軋草時,待設備發出縱向軋草指令后,電動推桿伸長將軋草力臂下壓,給軋草輪一定下壓力,將鋪在沙上的秸稈給豎立起來。同時在設備的移動過程中,軋草刀片輪的電機轉動帶動軋草刀片輪,使得前方的秸稈軋立起來。

圖5 縱向軋草機構
3 控制原理設計
3.1 全局規劃控制算法原理
基于Boustrophedon算法和雙向搜索算法對設備進行路徑規劃,并搭載GPS定位器,在起始點和目標點之間各自建立一個關于x軸、y軸的坐標系,并且兩個坐標系軸線延長相交,劃定一個50 m×50 m的規劃空間作為設備待完成的工作領域。上位機Jetson Nano通過激光雷達及視覺攝像頭進行全圖掃描,對該空間進行劃分,建立起一張柵格地圖,掃過的區域里面對有障礙物的區域柵格設定為1,待工作區域設定為0,設備經過待工作區域0后將該區域設定為已工作區域,標志為1[5]。考慮到植草機器人的體積大小問題,對柵格地圖進行膨脹,減小誤差,確定起始種植點,查找第一個0區域點,將其定為起始種植點,從起始種植點開始出發,判斷下一個點位是否為非障礙物點位,記錄每一個點位的坐標,將各個點位串連,還原坐標。理想情況下,障礙物為規則的,其具體實現為:根據選擇的初始方向x軸進行覆蓋柵格,碰到障礙物和邊界時,先判斷x軸的垂直方向即y軸方向是否存在障礙物,若沒有障礙物點,植草機器人向y軸方向向上或向下移動一個距離;若有障礙物點,則不能進行移動,存在困區,進行回退操作,回到上一個柵格點,重復上述操作,判斷y軸方向的障礙物點是否存在,判斷結束后,接著往反方向開始新的覆蓋,直至全部點位覆蓋完全[6]。非理想情況下,障礙物存在凹陷即不規則,無法做到全方位覆蓋,存在死區,設備到達目標點后,需重新規劃出一條最短路徑到達未覆蓋區域(死區),路徑規劃方式與理想規則的障礙物方式等同。在一些轉折點的區域,設備采取差速旋轉方式,使軌跡更為漸緩,鋪設的方格也更為合理。當規劃的柵格地圖上的0區域點都已完成鋪設工作后,將會拓展到下一個目標點,并且將上一個目標點作為下一個工作區域的起始點,實現點與點之間的拓撲[7]。設備控制邏輯原理如圖6所示,該設計滿足工作的要求,同時能夠達到設備自動化、智能化的效果。

圖6 控制邏輯原理圖
3.2 整體電路控制系統設計
設備開啟,對Jetson Nano、STM32、ESP32主控進行初始化,攝像頭開啟,激光雷達開啟,對周圍進行掃描建立柵格地圖,各傳感器將目前檢測到的實時數據傳到ESP32進行數據濾波處理,篩選不穩定的數據[8]。發送端ESP32通過銥星9602模塊A將數據發送到接收端的銥星9602模塊B上,將數據上傳給接收云端的ESP32,接收云端ESP32將數據再上傳到服務器中[9]。MPU6050讀取當前設備的俯仰角及歐拉角,并將數據傳給Jetson Nano,Jetson Nano處理數據,規劃路線,發出下一條指令給STM32用于執行相應動作的執行函數,STM32將要執行的信號和PWM脈沖電流傳給驅動器,驅動器將脈沖信號放大驅動電機的轉動,同時該系統還可進行人工手動操作,用戶可在云端發出指令確定下一 個目標點,以合理調節鋪設沙障的覆蓋區域[10]。具體的電控原理如圖7所示。

圖7 整體電路控制系統原理圖
4 結論
本文從實際出發,對設備在荒漠化地帶的工作場景及具體用途進行了綜合研究,分析了設備具體運動及工作的原理,同時對設備的結構進行了創新性的設計,引用了當前主流的算法并設計了相應的控制系統。本文設計的機器人有效地解決了當前種插草方格效率低、人力成本高等問題,對治理荒漠化以及綠色植被的恢復工作具有較為重大的意義[11]。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
工業設計(2016年12期)2016-04-16 02:52:00
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
設備管理與維修(2015年12期)2015-04-09 06:57:00
