基于BIM的扁平型疊箱式剛構渡槽掛籃設計及應用
2023-11-09 03:09:24范樹先
水利技術監督 2023年10期
李 果,范樹先,高 飛
(中鐵十八局集團市政工程有限公司,天津 300222)
渡槽廣泛應用于水利工程,在跨區域調水方面起到了重要的作用[1]。在眾多涉及渡槽的工程項目中,運用到了掛籃施工[2]方案。針對掛籃的施工,眾多專家進行了學術研究和工程實踐。
方小林等[3]研究了新型掛籃形式,并重點分析了掛籃的受力性能。該研究形成的新型掛籃滿足規范設計要求,為工程的實踐提供了重要參考。曹支才等[4]針對大型掛籃施工利用有限元軟件模擬了力學表現規律,有效地保證了施工的安全性。程皓等[5]研究了面向掛籃的設計建立了數學優化模型,得到了保證受力安全前提下的最小用鋼量。趙銳[6]為了解決菱形掛籃施工過程的安全問題,分析了不利荷載作用下,結構的位形和內力,并給出了相應的控制指標。李洪坤等[7]探索了連續梁橋懸臂施工過程中,掛籃各桿件變形及受力的變化情況,并在施工過程中布置了多類監控點以保證施工的安全性。
在掛籃施工過程中,對于構件的力學性能的研究較為成熟,然而對于施工全過程的技術交底和精細化管理的研究相對較少。如何實現設計與施工的一體化建造,并高效的管控施工質量和安全,形成掛籃設計的標準化流程是本研究的重點。BIM技術為掛籃的智能化設計和高效施工管理提供了思路和工具。
段曉晨等[8]基于BIM技術提出地鐵車站土建工程施工進度的三維動態優化控制方法,該方法有效地輔助施工決策。鄧秋楠等[9]基于BIM技術形成了智慧工地的管理模式,規避了工程體量大帶來的作業復雜的問題。譚堯升等[10]借鑒BIM技術和信息模型理念形成了施工期多維信息模協作管理體系,精準地控制了施工進度和工程建設質量。
針對掛籃施工的研究現狀,本研究基于BIM技術提出了智能化設計及高效施工管理方法。依托紅水河渡槽橋梁工程,總結了BIM技術的應用價值和流程。在設計過程中,形成了兩類掛籃形式的設計理念和族庫。面向施工過程,形成了全過程智能化管控方法,為類似工程的精細化管理提供了參考。
1 工程概況及難點
本研究中,以紅水河渡槽橋梁工程項目為例,形成了掛籃智能化設計及高效施工管理方法。本節中,分析了工程的概況,歸納了掛籃施工過程的主要步驟,并總結了設計及施工過程的重難點。
1.1 項目概況
紅水河渡槽橋梁段全長466.1m,渡槽橋梁設計有6跨7墩,最大跨徑為150m,其中2#、3#墩為主墩,位于紅水河河道中,墩高16.5m。橋梁下部結構設計采用承臺+樁基的形式,上部結構設計采用83.55m+150m+83.55m雙幅變截面預應力混凝土連續剛構+簡支梁的形式。主墩承臺為矩形鋼筋混凝土結構,且嵌入河床巖層內;2#墩、3#墩為雙肢薄壁墩,1#墩、4#墩為薄壁空心墩;主跨上部結構施工采用掛籃分段懸臂對稱澆筑施工,兩端引槽段施工采用支架現澆法施工。紅水河渡槽橋梁平面及立面布置圖如圖1所示。
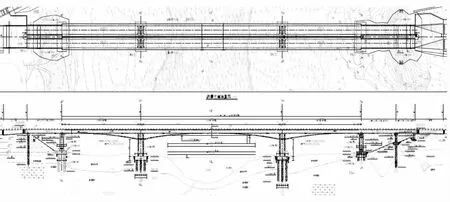
圖1 紅水河渡槽橋梁平面及立面布置圖
渡槽0#塊設計尺寸為:12.0m(長)×10.0/12.8m(底寬/頂寬)寬×9.96m(高),如圖2所示。結構形式屬于上下雙箱室結構,其中下箱室凈高5.11m,上箱室凈高2.75m;底板寬10.0m,厚1.0m,腹板厚度為1.0m,中板厚0.55m,頂板寬12.8m,厚0.55m,頂板設置為雙向排水坡,坡度1%;橫隔板設置在下箱室內,寬1.3m,人洞結構結構尺寸為2.0m(高)×1.4m(寬)。
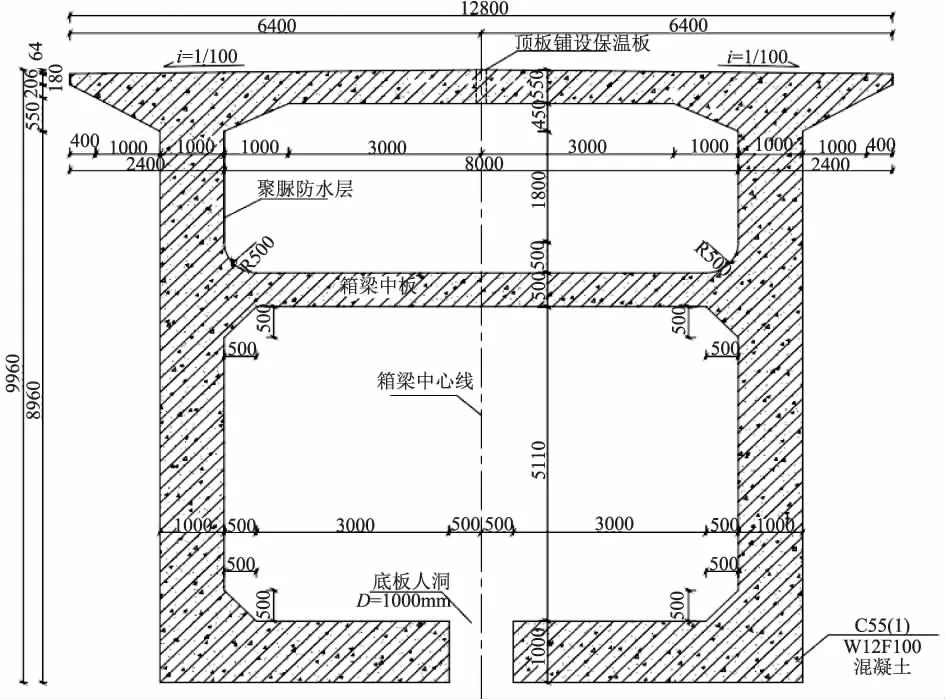
圖2 0#塊斷面圖
1.2 工程難點
施工過程中,橋面箱梁采用掛籃懸臂澆筑方式,其中掛籃分為三角掛籃和菱形掛籃兩種。施工過程中,掛籃的施工主要分為了拼裝、行走和拆除3個主要工序。在每個工序中需要進行混凝土的澆筑,各類構件的連接,同時滿足各類工況的受力性能的規范要求。施工過程中,掛籃的安裝如圖3所示。

圖3 掛籃的安裝
在掛籃施工過程中,由于建造體量大,水文和氣候條件復雜,導致項目管理方面存在著設計要素多、施工工藝復雜、安全風險高3個難點。
1.2.1設計要素多
在本項目的施工中,在初始階段,掛籃的拼裝長度為12m,該部分掛籃需要牢靠地錨固在成形態的墩頂構件上。掛籃的設計過程按照最大梁承受的荷載進行受力性能的評估,此類掛籃屬于無平衡重自行式掛籃。其中,單端自重不超過130t(含模板及小型機具),設計最大承載能力不小于270t。在掛籃中主要存在著主桁架系統、底籃系統、行走及錨固系統、模板系統和懸吊系統。各個系統之間交互關系復雜,受力性能不易判斷,需要在設計過程中考慮各個構件之間的連接,以及是否滿足施工工藝的要求。
1.2.2施工工藝復雜
在掛籃施工過程中,存在著拼裝、預壓、行走和拆除4個主要步驟。由于大型掛籃存在的構件多,因此在整個施工過程中,涉及的施工工藝較為復雜,無法實現對全過程的精細化管理。同時,施工工序較多不利于施工質量的控制,給施工過程的橋面成型帶來了困難。
1.2.3安全風險高
掛籃施工過程中管理的精細化水平較低,容易導致構件的安裝強度和穩定性的不足。另外,施工過程中涉及的構件和工序較多,施工工藝復雜,因施工質量不足容易造成安全事故。
2 BIM及其在設計施工中的應用
針對掛籃施工過程存在的難點問題,本研究在BIM技術的驅動下形成了智能化設計及施工管控方法。本節中,總結了BIM技術的特點及其在工程項目中的應用價值,面向掛籃設計與施工,建立了BIM技術的融合機理。
2.1 BIM技術特點
BIM技術具有參數化、信息化、可視化的特點,是實現建造全過程虛實交互的紐帶[11]。在掛籃設計與施工過程中,BIM技術存在可視化程度高、施工動態展示和誤差自動檢查的特點[12]。
2.1.1可視化程度高
BIM技術可以實現對施工全要素的三維建模,相較于傳統二維建模技術,具備更高的可視化程度。在BIM技術的驅動下,可以更加高效地保證設計的可行性和施工過程的合理性。基于可視化的三維模型,可以更直觀清楚的分析設計的不足和施工安全風險。
2.1.2施工動態展示
基于三維可視化模型,在BIM技術的驅動下,還可以進行施工過程的復雜工藝動態展示。基于動態展示直觀有效地進行施工工序和復雜工藝的技術交底。
2.1.3誤差自動檢查
BIM技術可以實現各專業、各流程的協同工作。因此,針對項目設計及施工過程存在的碰撞、誤差等現象,可以及時精準識別,有效地提高施工方案的可行性。
2.2 BIM的應用價值
在本項目中,存在著設計要素多、施工工藝復雜、安全風險高3個難點。BIM技術具有3個顯著的特點,因此在本工程中應用BIM技術可以實現掛籃的智能化設計和施工的智能化管控。
在設計過程中,依托BIM技術進行三維可視化建模,精準識別構件之間的連接關系,并評估設計方案的可行性。同時BIM技術的應用以直觀的方式對比構件與規范的區別,規避了掛籃結構中受力不合理的現象。
在施工過程中,依托BIM技術進行施工動態模擬,可以動畫的形式進行復雜工序和工藝的技術交底。本項目中,掛籃體量較大,施工環節眾多,在BIM技術的驅動下以更直觀的形式對施工工人技術交底,有效地保證了施工的質量和安全。
2.3 BIM技術與掛籃設計與施工的融合機理
BIM技術在設計與施工階段起到了信息共享和傳輸的作用[13-15]。在掛籃的施工過程中,由BIM技術制作出掛籃的施工動畫為現場施工管理提供依據。在施工的過程中,根據現場的操作和偏差修正BIM模型。最終在BIM模型中進行安全和質量的評估,及時規避施工風險。BIM與掛籃設計、施工的融合機理如圖4所示。
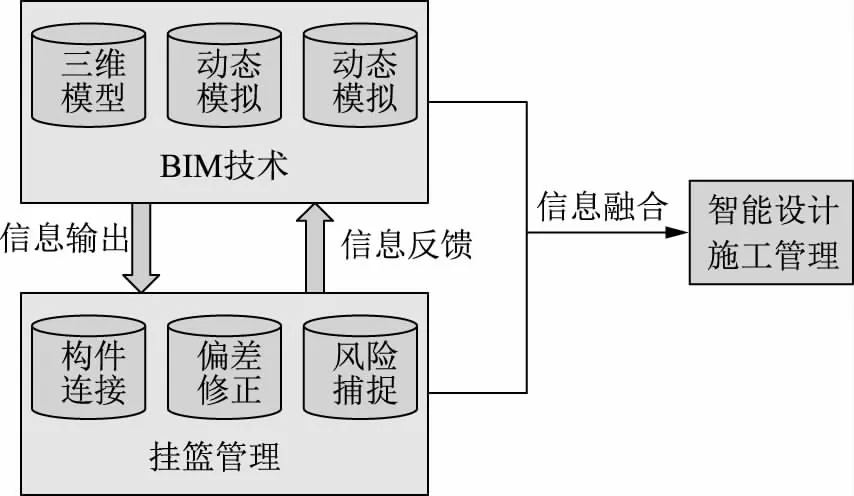
圖4 BIM與掛籃設計、施工的融合機理
3 剛構渡槽掛籃的智能化設計
在本項目中,掛籃分為了三角掛籃和菱形掛籃。在BIM技術的驅動下,進行三維建模。在此過程中,將掛籃分為了5個系統,即主桁系統、行走及錨固系統、底籃系統、模板系統和懸吊系統。本研究基于BIM技術進行可視化建模,形成掛籃構件的族庫,為施工過程建立高精度模型。
3.1 基于BIM的三角掛籃的設計
本研究中,在BIM技術的驅動下進行了掛籃的三維建模。針對三角掛籃形成了相應的構件族庫,并以三維立體模型進行了設計可行性評估,為施工管理提供了依據。
3.1.1三角桁架系統
三角桁架是掛籃的承重結構,在箱梁的腹板位置布置了兩篇桁架,并由角鋼進行連接,如圖5所示。其中桁架弦桿均采用槽鋼組焊而成,桁架中的各類桿件采用銷栓連接。為保證結構的安全,在桁架的前端節點布置了一根橫梁,該橫梁將兩片主桁架連接成為了整體。
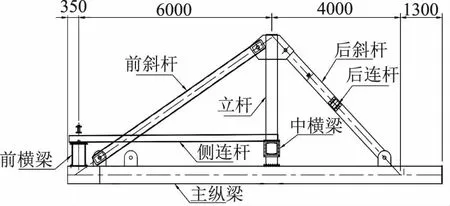
圖5 主桁架布置圖
3.1.2底籃系統
三角掛籃中的底籃系統包括底模縱梁、前下橫梁、后下橫梁及底模板。底模縱梁采用工字鋼,前下及后下橫梁由槽鋼組焊而成。前上、下橫梁通過吊桿連接,同時吊桿還連接了后下橫梁與現澆梁截面底板。底模采用大塊復合鋼模板制作,在墊層中用到槽鋼以便于脫模施工。
3.1.3懸吊系統
懸吊系統由吊桿和承重吊架組成。在懸吊系統中,將懸臂灌注的混凝土重量及模板重量分別傳至主桁架和已澆注的混凝土梁段上。本研究基于BIM技術建立了前吊桿系統和后吊桿系統。在系統中,明確了連接構件和橫梁的位置關系,如圖6所示。
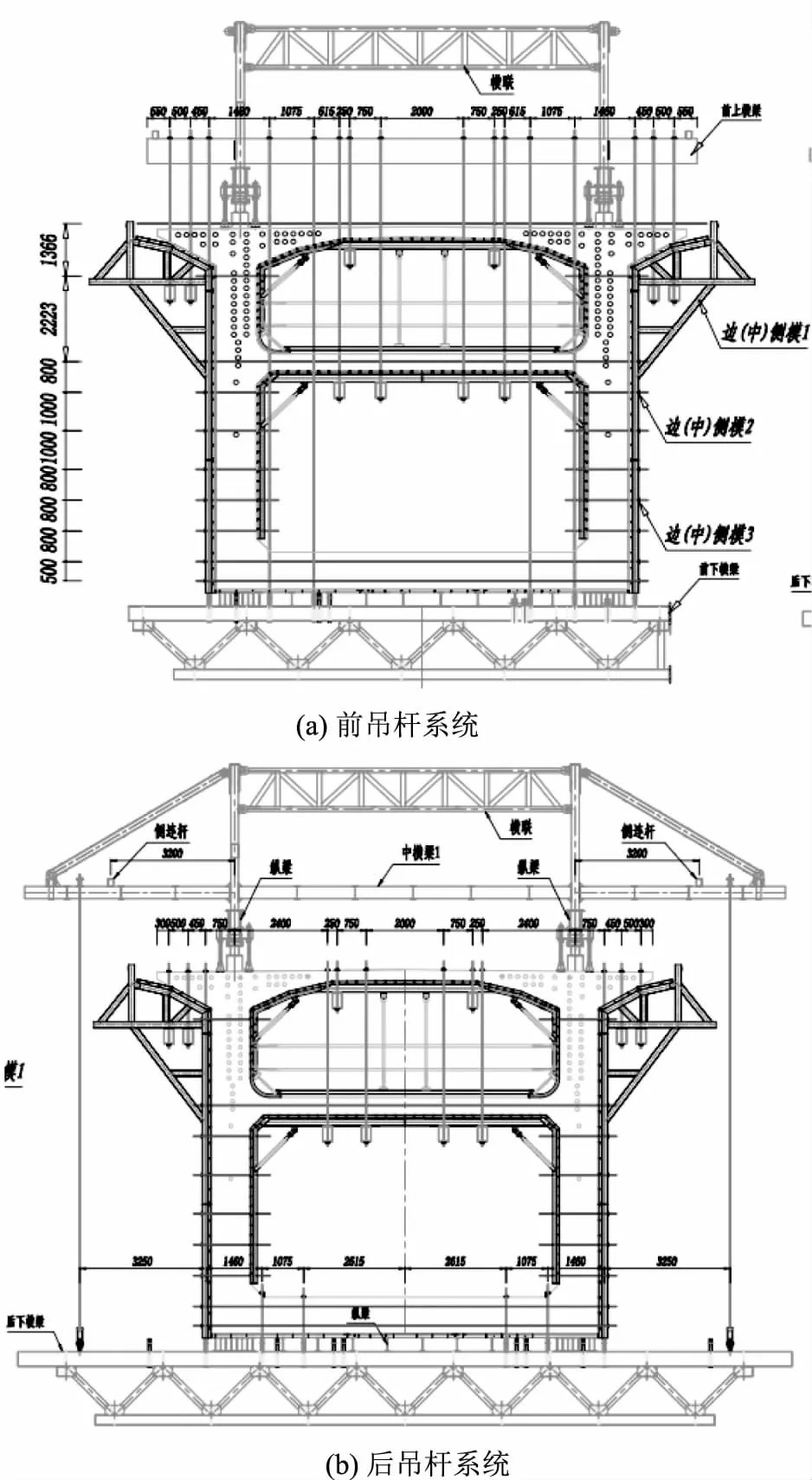
圖6 懸吊系統
3.1.4模板系統
利用鋼板和鋼框組焊合成箱梁的外側模。兩條滑梁在模板中起到了支撐的作用,滑梁分為了內外兩組并由H型鋼焊接。外滑梁由前上橫梁和現澆箱梁翼板通過吊桿懸掛。由鋼板和鋼框組焊形成內模,內模桁架吊在兩根內滑梁上,內滑梁吊在前上橫梁和已澆梁段的頂板上,內模脫模后可沿滑梁前行[16]。
3.1.5掛籃走行系統
走行系統分為桁架走行系統,底模、外模走行系統及內模走行系統。在兩片桁架下的箱梁頂面鋪設兩根軌道,軌道頂面放置前后支座,支座用螺栓與桁架節點板連接,前支座沿軌道滑行,后支座以反扣輪的形式在軌道頂板滑動。
3.2 基于BIM的菱形掛籃的設計
在本項目的施工過程中,還用到了菱形掛籃。在BIM技術的驅動下同樣進行了5個系統的立體化設計。與三角掛籃的主要不同點在于主桁架系統。主桁架由4片桁架和1片上橫梁組成。主桁架由平聯和前后橫梁連成整體,組成掛籃主要受力結構。菱形掛籃的主桁架系統如圖7所示。
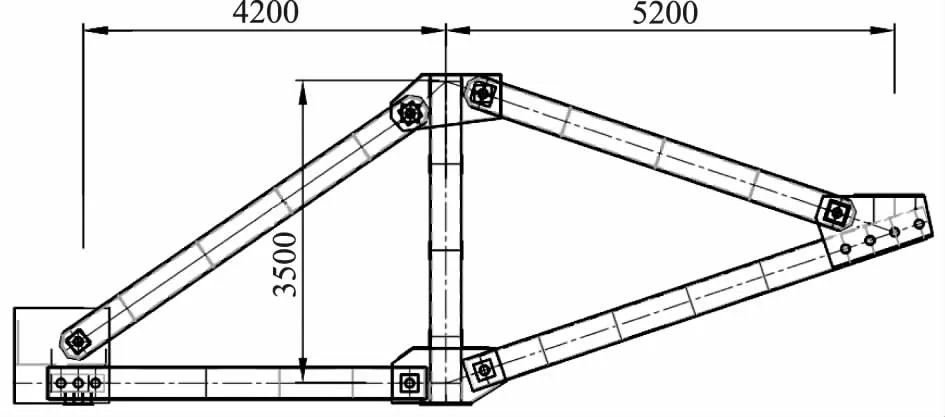
圖7 主桁架系統
4 BIM技術驅動的剛構渡槽掛籃施工的智能化管控
4.1 掛籃施工全過程智能化管控流程
在BIM技術的驅動下,實現了掛籃的智能化設計,并建立了三維立體模型。在施工過程中,基于BIM技術形成了智能化管控流程,面向拼裝、行走和拆除3個階段[17-18],建立了輔助施工的動畫,有效地降低了施工安全風險并提高了施工質量。在BIM模型中,形成施工全過程的動畫,以可視化的形式進行技術交底,指導施工全過程。在施工過程中,存在著眾多工序和工藝,容易產生施工誤差。將施工過程的掛籃狀態與BIM模型對比,修正BIM模型,并進行后續施工的模擬。由此實現施工方案的可行性分析,提高了施工質量并規避全風險。基于BIM的掛籃施工全過程智能化管控流程如圖8所示。
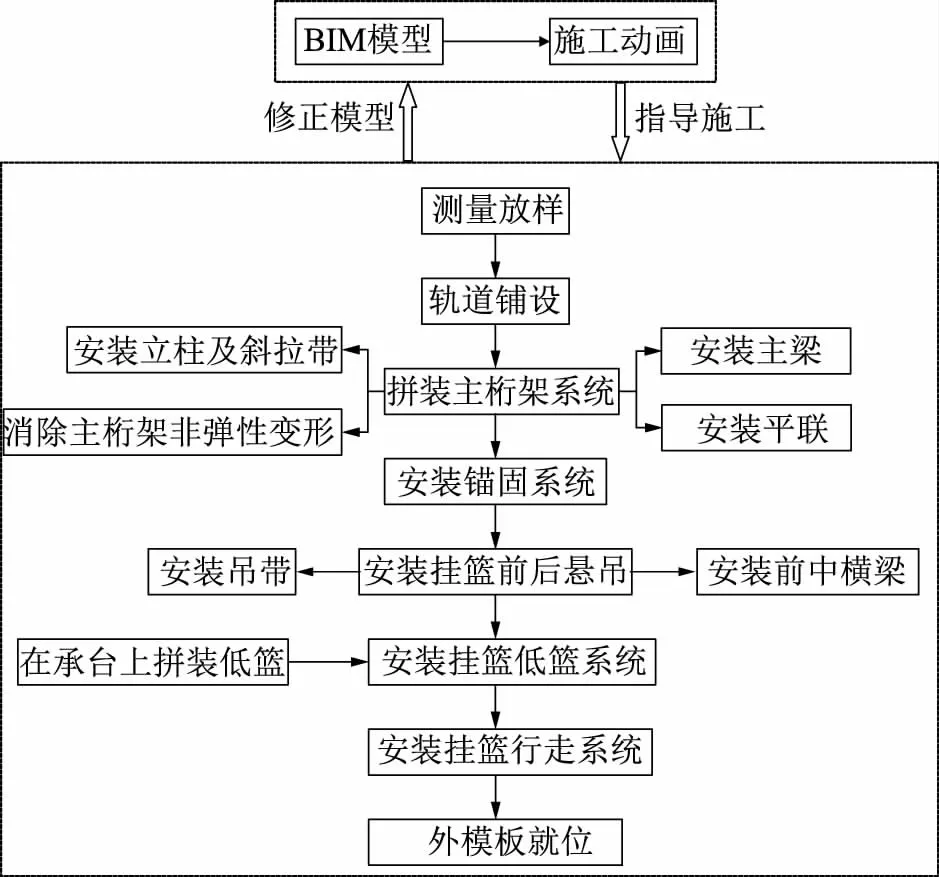
圖8 基于BIM的掛籃施工全過程智能化管控流程
4.2 基于BIM的掛籃拼裝控制
4.2.1拼裝掛籃主桁
基于BIM模型形成了掛籃主桁架的拼裝過程,如圖9所示。主梁的前支腿和后支腿放在運行軌道上,然后主梁被定位和錨定,再將主梁用螺栓固定在前支腿和后支腿。立柱的底座用長螺栓臨時固定在主梁上,然后將中心梁定位。立柱用螺栓固定在主梁上。由于傾斜桿是通過銷桿連接到立柱和主梁上的,所以要用千斤頂來安裝銷桿,必須調整傾斜桿的位置,使其在插入銷桿后處于銷桿的中心。在安裝過程中,各根桿件的偏位應滿足規定要求。
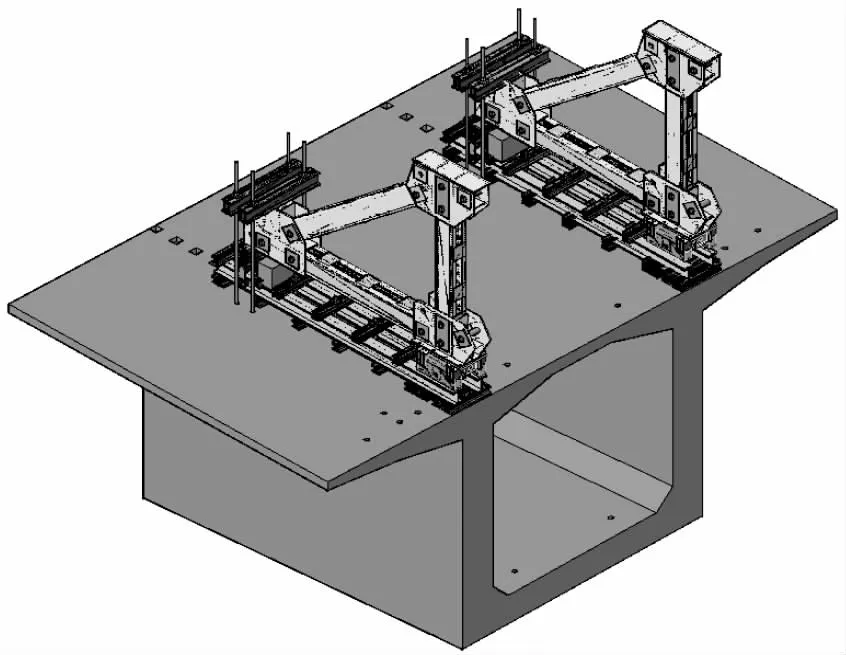
圖9 掛籃主桁的拼裝
4.2.2安裝掛籃錨固系統
錨固系統主要由掛籃錨和行走錨組成,兩者均由平梁和細軋鉸接點錨固。當懸掛管的后錨定點被設置時,應盡可能地靠近后支撐柱或后梁的中心,在施工過程中對錨定點的任何調整都應根據這一原則來進行。同時,軌道上相鄰錨固點之間的最大距離不應超過設計要求。在走籃過程中,應不斷調整錨點的位置,使錨點之間的距離符合要求。
4.2.3安裝掛籃懸吊系統
本項目施工過程中懸吊系統吊桿均采用精軋螺紋鋼。將上橫梁與主梁栓結固定,同時將前吊帶錨固扁擔梁與上前橫梁栓結固定。利用吊車提升前吊桿,穿進錨固扁擔梁,并用吊帶承重銷錨固。BIM模型驅動的掛籃懸吊系統如圖10所示。

圖10 懸吊系統安裝
4.2.4外模板安裝
掛籃外側模板采用箱梁0號塊外模,從0號塊縱移就位,如圖11所示。首先安裝一側模板滑梁(另一側模板滑梁待一側模板滑移就位后再安裝),將滑梁與模板栓結固定,安裝前端滑梁分配梁以形成整體,卸落模板,用兩個葫蘆牽引模板前移就位。
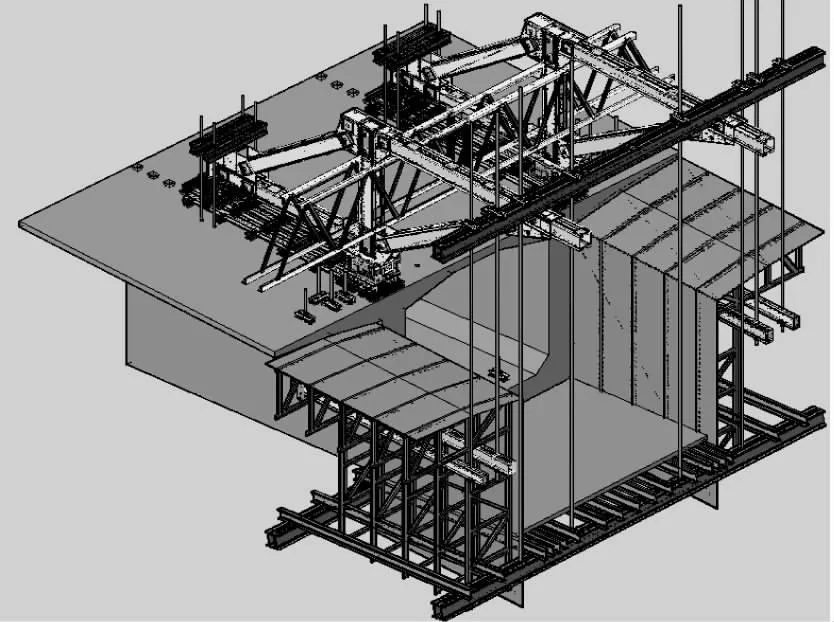
圖11 模板安裝
4.3 BIM驅動的掛籃行走
在掛籃行走前,確認行走吊桿錨固的牢靠性,同時檢查各項保險是否安裝齊備。行走前在軌道上從前支座處開始使用石筆每10cm畫一標記。掛籃準備行走前狀態如圖12所示。
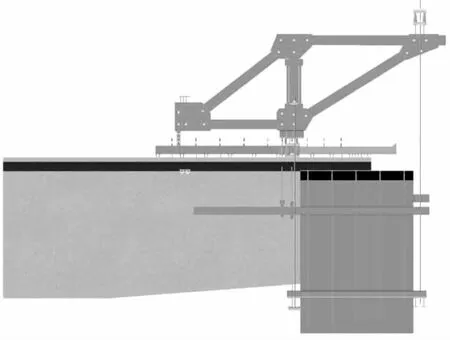
圖12 掛籃準備行走前狀態
掛籃行走時,需保持主桁架同步向前行進,掛籃行進時根據軌道上刻畫好的尺寸,主桁前后位置偏差最大不得大于10cm。掛籃行走過程中,應派人巡視是否有模板吊桿與混凝土或鋼筋有刮碰現象。
本項目中,考慮到箱梁綁扎鋼筋施工方便,內模不需與掛籃同步行走的,因此,施工過程中將內模用兩臺2t以上手拉葫蘆拉出就位。解除內滑梁尾端滾動吊具錨固,移動滾動吊具到預留孔處,重新穿吊桿,等待下一次行走。由此完成第一次行走,如圖13所示。

圖13 掛籃行走到位
4.4 掛籃的高效拆除
在本項目中,所有的懸臂式混凝土都已澆筑完成,吊籃可以被拆除。首先,在橫梁頂部的四個葫蘆將被用來提升下籃,拆除前后懸掛帶,然后將下籃降到地面。外層模板也應采用將整個模板降至地面并拆除的方法進行拆除。拆除箱體的內模板后,應手動將其移至梁頂,然后吊至地面。籃子的上半部分是用起重機拆卸的。包括支撐梁、支撐及其平腿、主梁及其平腿、前后梁、前梁、中梁和后梁、前后腿和走道等。整個過程中,基于BIM技術進行拆除的可行性分析,有效地規避了施工安全風險。
5 結語
本研究針對渡槽施工過程中,存在的安全風險高、管理模式粗放等問題,提出了基于BIM的扁平型疊箱式剛構渡槽掛籃智能化設計及高效施工管理方法。
(1)針對紅水河渡槽的施工項目的概況和重難點,總結了BIM技術的特點及其在掛籃施工中的應用價值,形成了BIM技術與掛籃設計施工的融合機理,為施工過程的高精度管理提供了理論支撐;
(2)針對兩類掛籃(三角掛籃和菱形掛籃),形成了基于BIM技術的設計方法,并建立的相應的族庫和五類關鍵系統,為類似項目的設計提供了參考;
(3)面向施工全過程,建立了BIM技術驅動智能化管控機制。在該機制中實現了掛籃拼裝、行走和拆除的高效精準實施。
本研究形成的理論方法為提高了施工過程安全、質量管理的信息化水平,保證了施工的精度和效率,為類似的工程實踐提供了可靠的參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2021年9期)2021-07-16 07:11:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
