手扶式甘藍收獲機設計與試驗*
2023-11-11 04:13:34佟文玉張健飛曹光喬宋志禹金月寧曉峰
中國農機化學報 2023年10期
關鍵詞:作業
佟文玉,張健飛,曹光喬,宋志禹,金月,寧曉峰
(1.農業農村部南京農業機械化研究所,南京市,210014; 2.沈陽農業大學工程學院,沈陽市,110866)
0 引言
甘藍是我國蔬菜主要栽培作物,我國大部分地域四季均有種植[1],栽培面積廣且產量大[2]。甘藍現階段仍以人工收獲方式為主,人工成本約占生產成本的50%[3]。國外早在20世紀初已經對甘藍收獲機作業性能開展了廣泛的研究。近年來,甘藍收獲裝備逐步向聯合收獲作業方向發展,尤其是用于商業推廣的機型,普遍要求收獲機更加高效智能,可以一次性完成收獲、集箱、運輸等聯合作業[4-5]。國內由于蔬菜生產和農機設備更新換代的政策導向以及甘藍生產管理體系的完善和健全,各高校和科研機構在汲取國外先進科技方法的基礎上自主創新[4],先后對甘藍收獲理論與設備開展系列化探索與研究。Hsu等[5]研發試制了一臺雙行甘藍收獲機,田間試驗效果不佳;王志強[6]、李小強[7]等設計并優化了4YB-1型甘藍收獲機,但并未制造出物理樣機,只對整機進行了虛擬設計,以期從結構設計優化上破解甘藍收獲的問題;周成[8]設計了一款采用雙螺旋結構輸送甘藍的收獲機,進一步減少輸送過程中對甘藍的損傷;杜冬冬[9]設計了一種履帶自走式甘藍收獲機,但通過試驗發現收獲過程切根效果不理想;房欣等[10]設計了一種壓頂式甘藍收獲機,采用壓頂式與雙螺旋輸送相結合的輸送形式,進一步提高了甘藍的收獲性能;李天華等[11]設計了一種采用球夾式輸送結構的履帶式雙行甘藍收獲機,柔性輸送帶設計為波浪狀,降低了輸送損傷,但該結構只能收獲球徑大小一致的甘藍,對偏大或偏小的甘藍,存在堵塞、漏采現象。張健飛等[12]研創了4GCSD-1200型自走式甘藍收獲機,整機采用雙動力雙泵全液驅動系統,主要由自走式雙動力履帶行走底盤、甘藍高效低損收獲割臺、智能管控系統等組成,一次性作業可實現雙行甘藍的拔取、輸送、切根、剝葉、集箱等功能。
因此,本文對江蘇一帶甘藍種植農藝及市場化需求進行調研,基于甘藍物理力學特性試驗及Ansys模態分析對關鍵部件進行分析校核,設計一種適用于江蘇甘藍主栽品種及種植模式的手扶式單行甘藍收獲機,以期提高甘藍收獲效率,降低勞動強度。
1 種植模式及甘藍機采力學特性分析
1.1 種植模式
2021年,江蘇省甘藍種植面積約為450 km2,總產量約1 400 kt,露地種植比例高,約占甘藍種植面積的70%。為推行甘藍收獲機具宜機化標準并實現農機與農藝高度結合,同時為確保甘藍植株間距及行間距統一,應制定適合機具作業的種植模式。甘藍在種植前要進行開溝,之后由起壟機按照壟面寬度為900/2 200 mm,底面1 000/2 400 mm的要求進行起壟作業,同時預留機具作業通道寬度為200 mm,溝深150 mm,最后由移栽機進行移栽定植,保證行間距范圍在420~480 mm,株間距范圍在300~350 mm[12]。種植模式如表1所示。

表1 起壟種植模式詳細參數
本文針對上述種植模式設計的手扶式單行甘藍收獲機收獲幅寬為400 mm,工作幅寬為700 mm,適應行距范圍為400~500 mm,履帶寬度為180 mm,中心距為500 mm。以此來保證收獲機具在壟面進行收獲作業時工作性能穩定。
1.2 甘藍機采力學特性分析
本文選用江蘇主栽品種“春喜”甘藍作為試驗對象,該品種甘藍葉球緊實,下胚軸細長,單球重1.2~1.5 kg,成熟期球莖在180~200 mm左右。
1.2.1 剪切特性試驗
為選取適宜的割刀和合適的剪切力來滿足甘藍收獲的切根要求,需要對甘藍下胚軸莖處進行剪切特性試驗。本試驗所用儀器為美國UTM6503萬能試驗機。試驗方法如下:采用靜態測量法,設定試驗裝置探頭量程:5 000 N;試驗前速度:500 mm/min;試驗速度:100 mm/min;下胚軸莖切斷后回程速度:500 mm/min;起始力:0.01 N。直至甘藍下胚軸莖被剪切至斷裂,即為試驗結束,每組試驗10個樣本并對其進行編號,試驗結果如圖1所示。
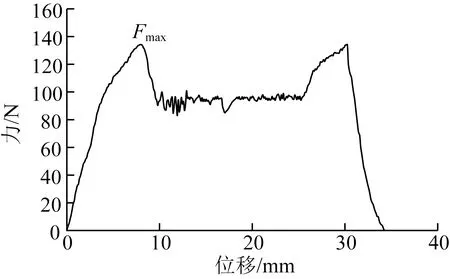
(a) 試驗值
通過試驗可以發現,剪切力在切割過程中,隨著加載時間的增加呈現出先升高后降低的規律,在切割過程中剪切力達到最大值為137.138 N,此時甘藍根莖完全切除。剪切試驗擬合曲線公式如式(1)所示。
F剪=-x2+31.374x-2.067 3
(1)
1.2.2 壓縮特性試驗
為避免甘藍被夾持輸送帶擠壓破損,影響甘藍的品質,對甘藍球體進行軸向與徑向壓縮力學特性試驗,通過壓縮特性試驗數據,為一級輸送帶的安裝位置及角度提供設計依據。采用靜態測量法,設定加載速度為10 mm/min對試樣施加壓力,直至甘藍試樣破損,試驗結束。每組試驗10個樣本,加載部位如圖2所示。

(a) 擠壓頂部
通過壓縮試驗可發現,甘藍球體在壓縮過程開始時,擠壓力隨位移的增加而增大,隨著變形的逐漸增大,擠壓力呈線性增長,所以此過程主要發生彈性變形;隨著位移繼續加載,壓力逐漸增大,當擠壓力為Fc時達到破壞極限,甘藍球體發生碎裂,此時甘藍損傷。
根據擬合曲線圖3可知,當壓縮位移為37.86 mm時,甘藍球體出現破裂,此時擠壓破裂力為1 198.3 N。擠壓試驗擬合曲線公式如式(2)所示。
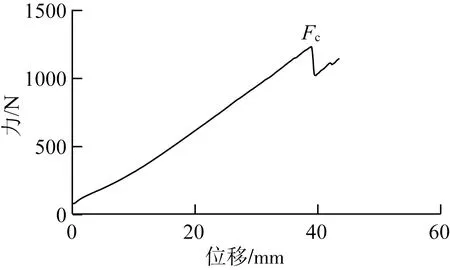
(a) 試驗值
F擠=0.185x2+23.217x+69.054
(2)
2 整機結構及工作原理
2.1 整機結構
該甘藍收獲機主要由履帶式動力底盤、拔取機構、夾持輸送機構、雙圓盤切根機構等組成。甘藍割臺位于行走動力底盤前部,采用三點懸掛式結構進行鉸接,以對稱中心面為基準呈縱向排列,單行甘藍收獲機結構示意圖如圖4所示。整機前部為甘藍收獲割臺裝置,由履帶行走底盤動力輸出軸提供動力,通過皮帶及鏈條實現動力傳遞,可一次性實現單行甘藍的拔取、夾持輸送、切根、集箱等聯合作業功能。
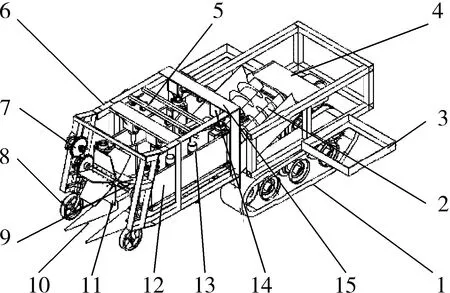
圖4 單行甘藍收獲機結構示意圖
2.2 工作原理
通過調整甘藍收獲割臺高度使拔取輥緊貼地面,由行走底盤的發動機輸出軸提供動力,經皮帶及鏈條傳輸后使拔取輥、輸送帶、割刀等關鍵部件協調運作。收獲作業時,拔取輥外旋完成甘藍拔取,通過撥禾葉片旋轉撥正甘藍并送入柔性夾持輸送機構,柔性夾持輸送機構將甘藍夾持向后輸送的同時,切根機構將甘藍根部切除并通過橫向輸送平臺清除多余外包葉后進入集料箱,完成收集,從而實現甘藍聯合收獲作業。手扶式單行甘藍收獲機基本參數如表2所示。
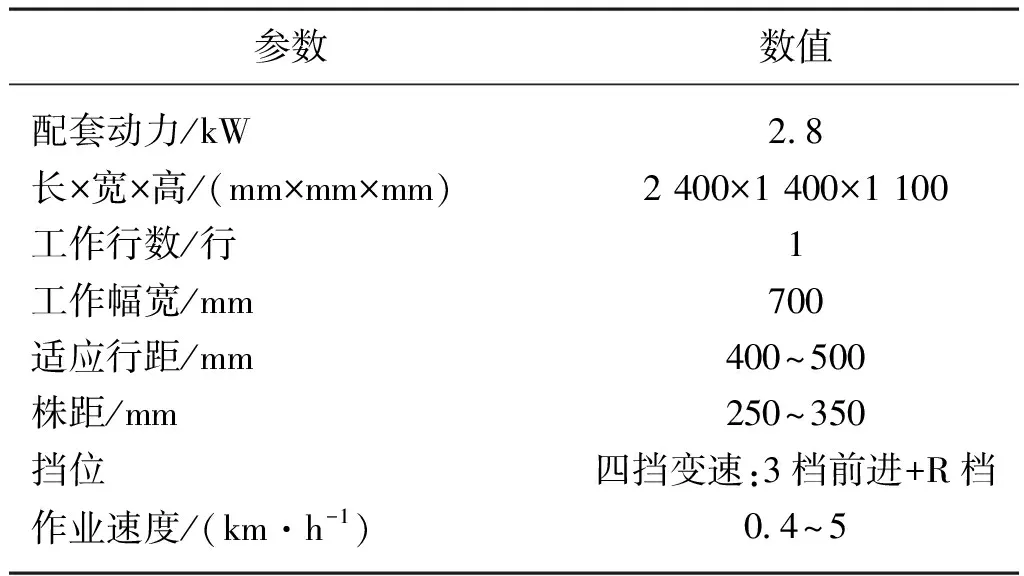
表2 整機技術參數
3 關鍵部件設計
3.1 撥禾機構
撥禾輪位于輸送帶喂入口上方,當甘藍被拔取后即將進入夾持輸送裝置時起到輔助導正喂入的作用。撥禾輪工作時外沿的線速度與機具工作時的前進速度的比值稱為撥禾速率比λ,當λ≤1時,撥禾輪的工作軌跡擺線幅度較小,無法實現對甘藍的扶持及導正功能;當λ>1時,撥禾輪可正常工作,如圖5所示。

圖5 撥禾輪運動軌跡
(3)
式中:Vo——撥禾輪工作時外沿線速度,m/s;
vx——機具工作時的前進速度,m/s。
將撥禾輪中心O在地面上的垂直投影點On設為坐標原點,甘藍收獲機進行收獲作業時前進方向為X軸正方向,Y軸垂直向上,則撥禾輪運動軌跡方程為
x=vxt+RncosWnt
(4)
y=Hn-RnsinWnt
(5)
式中:t——機具工作時前進時間,s;
Rn——撥禾輪的半徑,mm;
Wn——撥禾輪的角速度,rad/s;
Hn——撥禾輪中心到地面的高度,mm。
假設撥禾輪共有m張撥禾葉片,當一張撥禾葉片轉動一周時,收獲機具前進距離
(6)
式中:Vn——撥禾輪的轉速,r/min。
當撥禾輪正常工作時,為使每一張葉片轉動時都扶持導正一顆甘藍,撥禾輪外形尺寸應滿足
(7)
式中:d1——收獲甘藍直徑,mm。
為實現連續收獲,撥禾輪長幅余擺線之間的節距Sn應滿足
(8)
式中:Sl——甘藍種植株間距,mm;
n——撥禾葉片間隔量,一般取1,2,3。
本文機具撥禾葉片數為6,撥禾輪半徑為240 mm,甘藍種植株間距選擇350 mm,n取2。由此計算得撥禾速率比λ為1.435>1,由式(3)可知,撥禾輪可實現扶持導正功能,因此本文撥禾機構設計合理。
3.2 夾持輸送機構
甘藍進入喂入口并被夾持輸送的必要條件,如圖6所示,應滿足如下公式。
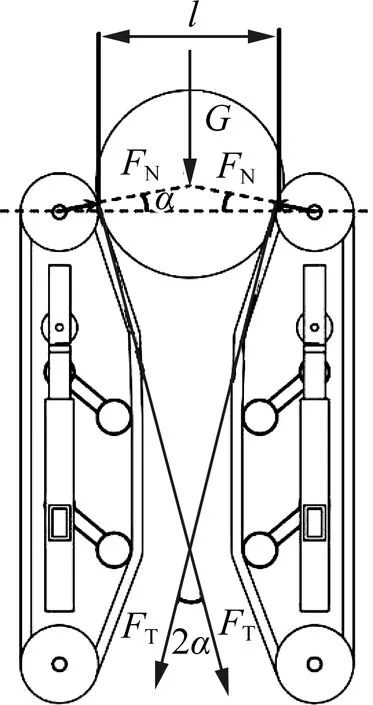
圖6 甘藍在喂入口的受力情況
(9)
式中:FT——摩擦力,N;
FN——輸送帶浮動輪對甘藍的壓力,N;
μ——輸送帶與甘藍的摩擦系數。
(10)
式中:D——輸送帶浮動輪的直徑,mm;
l——輸送帶浮動輪的間距,mm。
輸送帶喂入口夾持位置應為甘藍腰部,本文試驗對象“春喜”甘藍成熟期單球重1.2~1.5 kg,球莖180~200 mm之間,本文設計的夾持輸送機構喂入口間距為彈簧式可調且最小間距為160 mm,因此可計算得出輸送帶與甘藍摩擦系數的最大值為
甘藍所受最大擠壓力為
(11)
式中:G——甘藍成熟期單球重力,N。
由甘藍機采特性試驗可知,此時甘藍所受擠壓力遠遠小于甘藍最大擠壓破碎力1 198.4 N,因此該夾持輸送裝置設計合理。
3.3 切根機構
假設切根機構的兩個圓盤刀都是理想圓盤,并且將待切根的甘藍根莖理想化為正圓,根莖的直徑理想化為D1,同時切割工作中,圓盤刀與根莖均不變形,為理想化切割,根莖圓與兩個圓盤刀同時相切,見圖7。
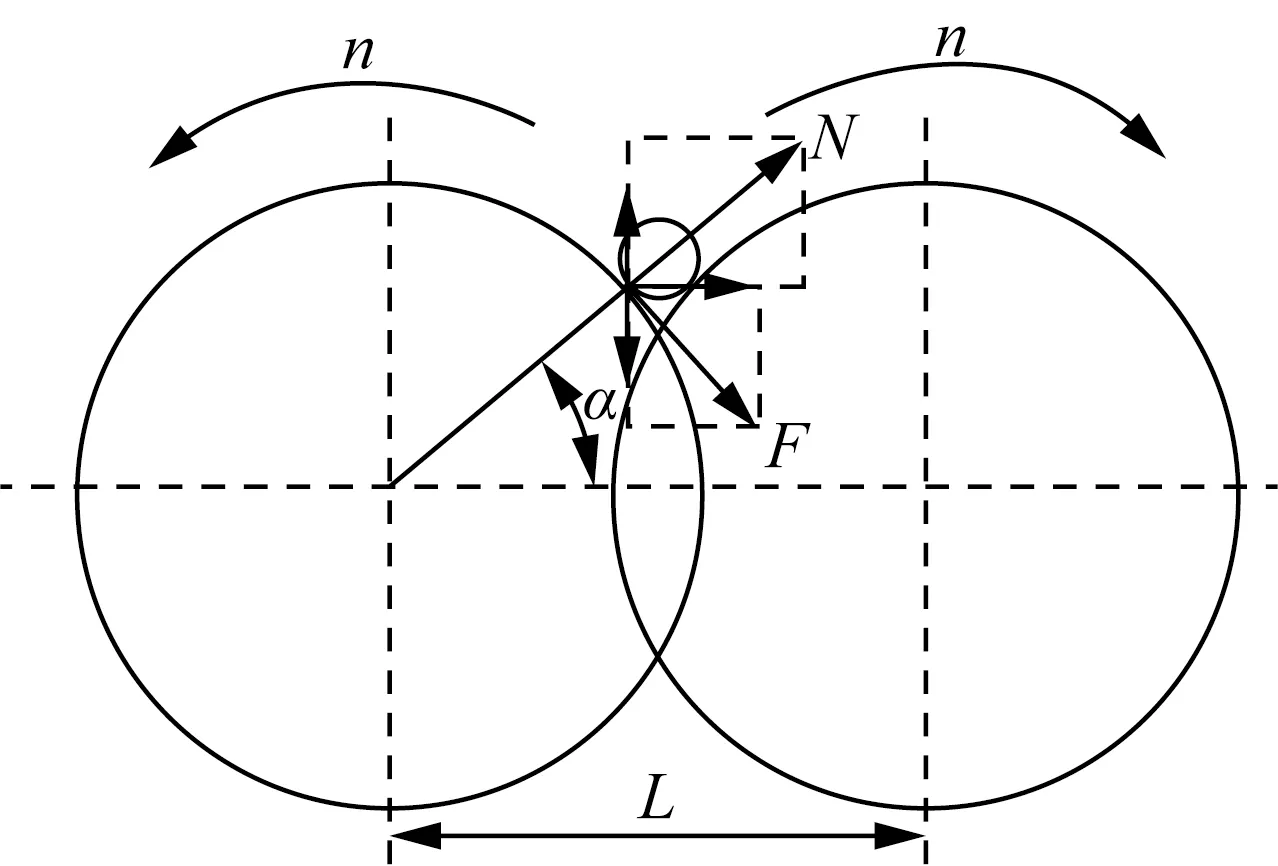
圖7 甘藍根莖受力分析圖
由圖7中的受力分析可知切根力RX和夾持力TY兩個作用力通過正交分解得出以下方程式。
RX=NX+FX
(12)
TY=FY-NY
(13)
式中:N——圓盤切割刀對甘藍的法向反作用力,其水平分量為NX、豎直分量NY,N;
F——形刀盤對甘藍根莖的摩擦力F的水平分量FX、豎直分量FY,N。
若要使得甘藍被圓盤割刀所夾持住,則需要滿足的條件是
TY>0
(14)
即FY>NY,其中F=N·f。
N·fcosα>N·sinα
(15)
因此,當f>tanα時,圓盤刀具有較好的夾持性能;
(16)
式中:f——圓盤刀與甘藍根莖的摩擦系數;
α——圓盤刀對甘藍根莖的法向反作用力與X軸的夾角,(°);
L——兩個圓盤割刀之間的間距,mm;
d2——切割處的甘藍根直徑,mm;
D1——圓盤割刀直徑,mm。
為了避免甘藍根部切割的不完全,在兩圓盤刀中心線方向使得兩刀保持一定距離,并且在軸線方向上兩刀要重疊一部分來平衡切根過程中甘藍根莖所受的水平力,從而保證切根的平整度和完整性。本文設計的雙圓盤刀具中心距為190 mm,圓盤割刀的刀盤直徑為200 mm,夾角α≈31.02°,此時f>tanα,可以很好地滿足夾持性能要求。
3.4 割臺機架模態分析
甘藍收獲機工作環境復雜多變,甘藍收獲機割臺機架除了受到搭載機構的壓力影響,還會受到多自由度振動影響[13]。本文基于Ansys軟件對甘藍收獲割臺機架進行振型模態分析(圖8),通過觀察其固有頻率及振型來檢驗該機架在工作時是否會發生共振以及結構剛度是否合格。
設定收獲割臺機架材料為Q235,約束條件為機架后端添加固定鉸接,橫梁處添加固定約束來釋放橫向自由度,工作過程中,割臺機架受到自身重力,工作地面對機具的支持力、柔性輸送裝置的壓力等。本機選用的發動機工作頻率為50 Hz,地面平整度和機具收獲速率會影響田間地面所產生的外部激勵頻率[13],因此本文將割臺機架與割刀選用同一單元進行六面體網格劃分,由Ansys分析模擬可以得到該割臺機架前6階模態振型。
(17)
式中:fo——地面激勵頻率,Hz;
λ——地形不平度波長,一般取320 mm;
Vm——整機行走速度,m/s,取0.4~5 km/h。
由式(17)可知,地面產生激勵頻率范圍為0.012 5~15.625 Hz。而收獲機割臺機架前六階振型固有頻率為65.984~142.74 Hz,遠遠大于地面的激勵頻率,收獲機割臺不會在進行收獲作業時發生共振而產生破壞。由圖8可知,振幅最大處為割刀處,可以通過更換高剛度材料來減少其彎曲與扭轉振動。
4 田間試驗
4.1 試驗條件
試驗地點位于江蘇省常熟市橫塘蔬菜專業合作社,試驗時間為2021年11月17—19日,采收對象為“春喜”甘藍,該基地采用上述單壟雙行種植模式。試驗設備及儀器包括:手扶式單行甘藍收獲機、米尺、電子秒表、電子秤、計數器、紙、筆。
試驗前,對試驗田進行檢查,保證機具作業環境平坦、無障礙物,并按要求調試手扶式甘藍收獲機各部分裝置保證其正常工作。
4.2 試驗方法及評價指標
甘藍機械化收獲沒有明確的相關標準和規定,因此本試驗參照GB/Z 26582—2011《結球甘藍生產技術規范》[14]及NY/T 3664—2020《手扶式莖葉類蔬菜收獲機質量評價技術規范》[15]等國家相關標準測試方法相關指標,選取收獲成品率、有效切根率、機采損傷率為評價指標進行田間試驗。
每次試驗在甘藍生長狀況優異的壟面進行(長度約60 m),每壟大約有280~330顆甘藍。甘藍收獲機分別以0.92 km/h、1.22 km/h、1.44 km/h、1.78 km/h、2.17 km/h進行采收,每組試驗重復5次,共5組,試驗結果取平均值。每組試驗結束后,對收獲的甘藍總數、損傷數、切根合格數、收獲合格數分別進行統計。
4.2.1 有效切根率
根據結球甘藍生產技術規范及莖葉類蔬菜收獲質量要求定義甘藍的切根效果,須滿足以下條件,即屬于有效切根。(1)機械切根截面須平整,不能發生折斷或切出兩個截面的情況;(2)切割位置須在甘藍外包葉上10~15 mm處,同時把外包葉切斷。
有效切根率公式如式(18)所示。
(18)
式中:C——有效切根率,%;
C1——無效切根甘藍數,顆;
C0——試驗甘藍總數,顆。
4.2.2 機采損傷率
根據試驗甘藍總數,定義機采損傷率,即統計每次試驗甘藍總數,機械收獲后損傷的甘藍數Q1。機采損傷率公式如式(19)所示。
(19)
式中:Q——機采損傷率,%;
Q1——機械收獲后損傷甘藍數,顆。
4.2.3 收獲成品率
根據市場需求定義收獲成品率,在收割時保證甘藍表皮整潔,無破損、裂球,切根斷裂等情況,且保留2~3片蓮座葉保護葉球,經過簡單處理可直接進行售賣。
(20)
式中:N——收獲成品率,%;
n1——收獲成品數,顆。
4.2.4 機采損失率
根據試驗甘藍總數,定義機采損失率,即統計每次試驗甘藍總數,機械收獲后漏收的甘藍數M1。機采損失率公式如式(21)所示。
(21)
式中:M——機采損失率,%;
M1——漏收甘藍數,顆。
4.3 試驗結果
田間采收效果如圖9所示,試驗結果如表3所示。

(a) 田間收獲效果

表3 田間試驗結果
從表3可以看出,手扶式單行甘藍收獲機的機采損傷率平均值為6.6%,機采損失率平均值為4.2%,有效切根率為93.5%,收獲成品率為92.8%。甘藍各項收獲指標隨著行走速率的增加而逐步降低,其原因是當機具作業速率過快時,甘藍之間相互擠壓使其偏離收獲割臺喂入口,導致甘藍因撞擊機械機構而產生損傷從而降低評價指標。手扶式單行甘藍收獲機整體為機械式傳動,動力由底盤提供并通過皮帶及鏈條進行傳遞,因此未開展收獲機工作參數優化試驗,在今后工作中,將在此基礎上優化設計甘藍收獲關鍵部件,并進行液壓傳動系統研究,實現甘藍工作參數可調來確定最佳工作參數組合等工作。
5 結論
1) 針對甘藍收獲作業人工勞動強度大、成本高、沒有專用收獲機械等問題,本文基于甘藍物理力學特性試驗及Ansys模態分析設計了一款適用于江蘇種植模式的手扶式單行甘藍收獲機,并闡述了其整機結構和工作機理;該機主要由履帶動力底盤動力輸出軸通過皮帶及鏈條為甘藍收獲割臺拔取機構、夾持輸送機構、切割機構件提供動力,一次可實現甘藍的拔取、輸送、切根和收集的聯合作業需求。
2) 田間試驗數據表明,手扶式單行甘藍收獲機甘藍機采損傷率為6.6%,機采損失率為4.2%,有效切根率為93.5%,收獲成品率為92.8%,完全符合手扶式莖葉類蔬菜收獲機評價指標及甘藍生產技術規范。該機操作安全簡單,工作性能穩定,收獲質量優異,研究成果可為甘藍收獲裝備開發及結構完善提供參考。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08