基于粒子群優化的空氣懸架自適應反推控制策略*
2023-11-11 04:02:18袁春元王興宸陶振興朱愛鑫
中國農機化學報 2023年10期
關鍵詞:系統
袁春元,王興宸,陶振興,朱愛鑫
(江蘇科技大學機械學院,江蘇鎮江,212000)
0 引言
半主動空氣懸架具有彈性剛度可變的特性,能夠較好地吸收外界的振動能量,并且重量較輕、噪聲較小[1]。近年來,對半主動空氣懸架進行了廣泛的研究,主要是PID控制、模糊控制、遺傳算法控制等方法[2-5]。
本文所用控制策略為自適應反步遞推控制,它是通過選擇合適的Lyapunov函數和反推控制相結合,考慮模型中的參數不確定性和外部擾動進而保證系統的性能要求。在此過程中,自適應反步遞推控制產生了兩種不同的設計方法,分別為QLF(Quadratic Lyapunov Function)方法和BLF(Barrier Lyapunov Function)方法。如Pang等[6]針對主動懸架的參數不確定性和安全約束問題提出一種基于約束的自適應反步遞推的跟蹤控制器,并通過仿真驗證效果。Goyal等[7]使用遺傳算法對自適應反步遞推主動懸架進行優化,對車輛的垂直位移進行比較研究。此外,Wang等[8]基于模糊控制和滑模反步遞推控制相結合的方法,對空氣懸架進行仿真分析。同時,由于控制器中的參數是根據經驗所選取的數值,所以本文提出粒子群優化算法(Particle Swarm Optimization,PSO)進行數據尋優,該算法簡單易實現、效率高、全局尋優能力強[9]。
為進一步提高車輛的行駛平順性,本文以半主動空氣懸架為控制目標,考慮系統參數的不確定性,建立基于非緊急制動工況下的半主動空氣懸架系統動力學模型,引入虛擬控制和參考軌跡設計Lyapunov函數,構造自適應控制律,使得系統能夠快速跟蹤,滿足系統的安全約束。分析零動態系統的穩定性,保證約束有界。對基于自適應反步遞推的控制策略使用粒子群算法對增益參數進行優化,在滿足原定要求的情況下使系統的性能進一步提高。最后對所設計的控制器進行仿真驗證與分析。
1 非緊急制動空氣懸架系統建模
為了簡化研究過程,假設所研究的車輛及其行駛道路左右兩側是完全對稱的,以其半側作為研究對象具有代表性,建立如圖1所示的1/2半主動空氣懸架車輛系統模型。

圖1 1/2半主動空氣懸架車輛系統模型
圖1中ms為懸掛質量,其中msf、msr為ms作用于前、后懸架的等效質量;Isy為ms繞y軸的轉動慣量;mwf、mwr為作用于前、后車輪的非懸掛質量;a、b和L為車身質心至前、后軸距離和軸距;Kwf、Kwr為前、后輪胎剛度系數;φ為車身俯仰角度;qf、qr為汽車前、后輪道路激勵位移;zwf、zwr為前、后軸非懸掛質量的垂向位移;zsf、zsr為前、后懸架等效質量的垂向位移;zs為車身質心處的垂向位移;Ff、Fr為前、后空氣彈簧的可變作用力;Fsf、Fsr為前后懸架定剛度力;Fcf、Fcr為前后懸架定阻尼力。
在車輛行駛中會出現制動減速工況,分為緊急和非緊急。非緊急制動的減加速度較小,約0.2~0.4 g。在汽車制動時,一般只考慮縱向運動,沒有驅動力,并且忽略其空氣阻力以及滾動摩擦力[10]。簡化制動模型,將制動力矩轉化為定值,等效為道路對車輪的滑動摩擦力。車輛的縱向運動的模型如圖2所示。
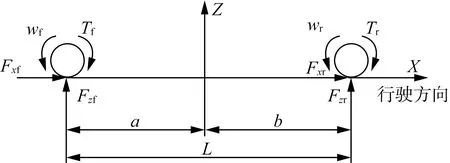
圖2 車輛的縱向運動模型
汽車在縱向制動的表達式為
(1)
前、后車輪繞各自車軸運動表達式為
(2)
汽車前、后輪的地面制動力
(3)
式中:m——半車總質量,kg;
u——汽車速度,m/s;
wf、wr——前、后車輪轉速;
Fxf、Fxr——前、后車輪地面制動力,N;
Iwf、Iwr——前、后車輪轉動慣量,kg·m2;
Fzf、Fzr——前、后車輪胎地面支持力,N;
Tf、Tr——作用在前、后車輪的制動力矩,N·m;
μf、μr——前、后輪胎路面附著系數。
因為懸架的垂直位移以及輪胎的地面不平度可忽略不計,因此
(4)
根據牛頓第二定律,建立車身垂向運動微分方程
(5)
車身俯仰運動的微分方程
(6)
式中:Fsf、Fsr——前、后懸架定剛度力Ksf(zsf-zwf)、Ksr(zsr-zwr),N;
Fcf、Fcr——前、后懸架定阻尼力
Ksf、Ksr——前、后懸架剛度系數,N/m;
Csf、Csr——前、后懸架阻尼系數,Ns/m。
當俯仰角較小時,前、后空氣懸架的動態垂直位移
(7)
以前、后非懸掛質量為對象,由垂直方向力的平衡得
(8)
定義狀態變量
x=[x1,x2,x3,x4,x5,x6,x7,x8]
則可將其寫成如下形式
(9)
由于ms因車輛重量或人員的變化而變化,從而導致Isy也變化,因此ms和Isy為不確定的參數,對于半車空氣彈簧半主動懸架系統公式,假設系統中不確定參數ms和Isy存在已知上下界,即滿足
(10)
為了滿足空氣懸架系統具有足夠的動態性能和安全約束,確定空氣懸架系統以車輛的駕駛平順性以及安全約束性能為控制目標。
2 自適應反推控制的設計及優化
通過反步遞推和Lyapunov穩定性理論設計自適應反步遞推控制器,并對控制器參數進行粒子群算法尋優。所設計的控制器可以在處理不確定的參數和外部干擾時,確保懸架系統的垂直和俯仰運動的漸進穩定性,并且滿足安全約束性能。本文設計了兩個控制器,第一個控制器基于BLF方法,第二個控制器基于QLF方法,并進行了對比仿真。
2.1 基于BLF的控制器設計
在文獻[11]中,介紹了對基于BLF自適應反步遞推控制器的設計過程。對于閉環系統而言,定義跟蹤誤差e1=x1-x1d,e2=x2-x2d,e3=x3-x3d,e4=x4-x4d,其中x1d、x3d為參考軌跡,x2d、x4d為設計的虛擬控制函數。
1) 基于BLF的控制器的初始條件,考慮半正定Lyapunov候選函數
(11)
為了使誤差e1、e2在預定時間內收斂為零,則設計合適的虛擬控制函數x2d、x4d如式(12)所示。
(12)
則V1(e1)、V3(e3)的導數
(13)
顯然當e2=e4=0時,
選擇半正定Lyapunov候選函數
(14)
式中:
估計值
與真實值θ1、θ2的 誤差,且θ1=1/ms、θ2=1/Isy。
(15)
式中:r1——正常數。
τ1=Ff+Fr-Fsf-Fsr-Fcf-Fcr

(16)
式中:r2——正常數。
τ2=a(Fsf+Fcf)-b(Fsr+Fcr)-aFf+bFr+msghφ+Mp
為了實現垂直和俯仰角加速度的漸近穩定性,自適應反步遞推控制輸出律
(17)
式中:m1、m2、k1、k2、k3、k4——正常數。
因此,
由此可得前、后輪的空氣彈簧可變力Ff、Fr,實現對懸架系統的控制。
2) 對懸架系統進行零動態穩定性分析,因為實際的系統為八階,所以零動態由四個狀態組成。令x1=0,x3=0,即
(18)
將式(18)代入式(9)得零動力學方程
(19)
其中,x=[x5x6x7x8]T
q=[qfqr]T
對應的系數矩陣分別為
由于矩陣A、B、C滿足赫爾維茨準則,因此零動態系統是穩定的存在。
2.2 基于QLF的控制器設計
本節中QLF使用的表達式和符號與基于BLF的控制器設計中所述的定義相同[13]。因此,定義跟蹤誤差e1=x1-x1d,e2=x2-x2d,e3=x3-x3d,e4=x4-x4d,則虛擬控制函數x2d、x4d如式(20)所示。
(20)
則V1(e1)、V3(e3)的導數
(21)
顯然當e2=e4=0時,
的投影算子和上文投影算子相同。
因此,自適應反步遞推控制輸出律
(22)
顯然,此時
零動態穩定性分析同BLF相同。
2.3 粒子群算法設計
當汽車進行直線非緊急制動時,其主要目標為降低車輛的俯仰角保證其姿態,其次降低車輛的車身垂向加速度、俯仰角加速度保證車輛的平順性,因此對空氣懸架系統進行參數優化,其適應度函數
(23)
式中:Ffy、Ffy0——有無控制車身俯仰角均方根值;
Fczj、Fczj0——有無控制車身垂向加速度均方根值;
Ffyj、Ffyj0——有無控制車身俯仰角加速度均方根值;
Fqdn、Fqdn0——有無控制前懸架動撓度均方根值;
Fhdn、Fhdn0——有無控制后懸架動撓度均方根值。
粒子群算法的參數如表1所示。
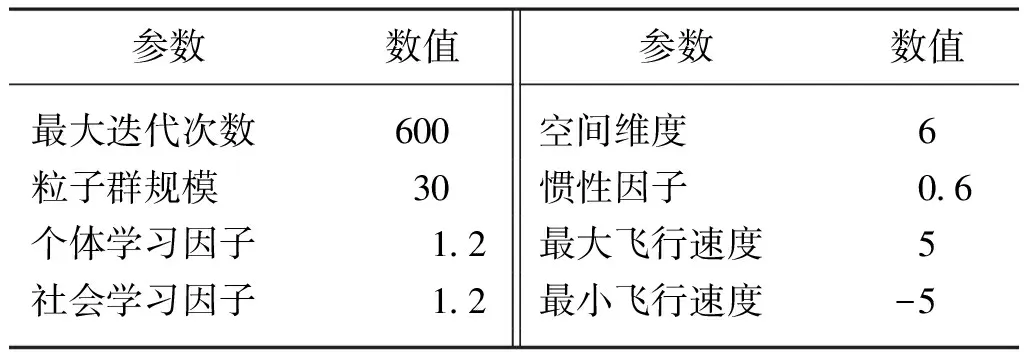
表1 粒子群算法參數
2.4 路面及初始條件的設定
2.4.1 隨機路面
路面激勵通常是由隨機振動模擬,國標中關于車輛振動路面輸入給出了具體的參考標準[14]。
因此,隨機路面輸入
(24)
式中:u——車輛行駛速度,m/s;
f0——空間下截止頻率,Hz;
w(t)——高斯白噪聲,dB。
針對建立的半車懸架模型,需要對前、后輪進行路面仿真,僅需考慮前、后輪經過同一路面的時滯性。選取B級路面,路面不平度系數Gq(n0)=6.4×10-5m3,汽車行駛速度為u=30 m/s,車輛減加速度設定為3 m/s2,系統仿真時間設定為5 s。
2.4.2 顛簸路面
通過凸塊信號作為路面干擾輸入對空氣懸架系統進行穩定性測試。凸塊信號
(25)
式中:h——道路高度,0.05 m。
汽車行駛初速度為u=30 m/s,對前輪進行L/u延遲即為后輪路面。
2.4.3 初始條件設定
考慮具有不同初始值的兩種條件。
條件1:設定初值x1(0)=0 m,x3(0)=0 rad,θ1(0)=1/350,θ3(0)=1/1 000。參考軌跡設置為x1d=0,x3d=0。
條件2:設定初值x1(0)=0.06 m,x3(0)=0.06 rad,θ1(0)=1/350,θ3(0)=1/1 000。參考軌跡為一個衰減的多項式,使車身的垂向運動在Td時間內達到穩定,從而提高車輛平順性。具體設計如下
(26)
式中:Td——預設時間,2 s;
a0、a1、a2、a3、a4——參考軌跡公式系數,分別為0.06、0、-0.09、0.06、-0.001 125。
3 仿真與優化結果分析
為了驗證所提出的基于粒子群算法的自適應反步遞推控制策略的效果,對懸架系統進行了基于MATLAB/Simulink的仿真分析。半車空氣懸架系統參數如表2所示。
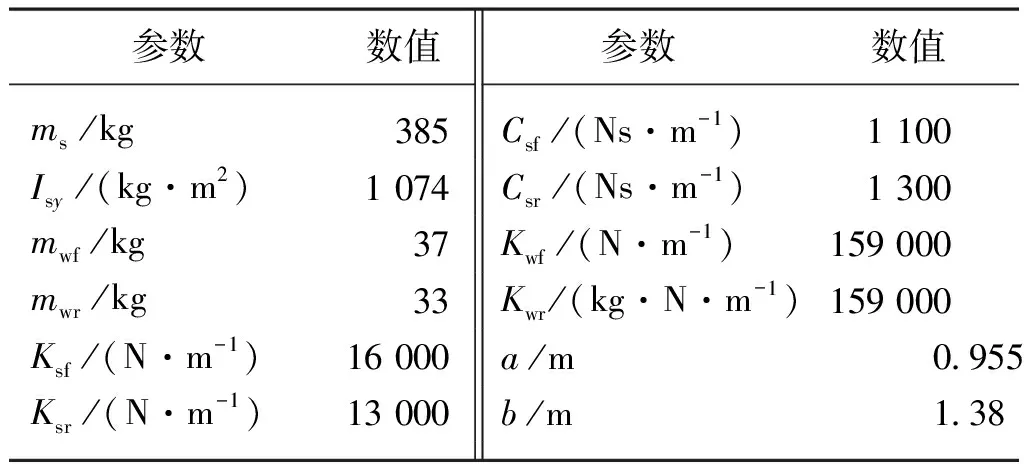
表2 半車空氣懸架系統參數
在懸架系統受到外界干擾時,調節k1、k2等參數增益能更好地使懸架系統快速收斂,使得車輛垂直加速度和車身俯仰角加速度趨于零。為此,使用粒子群算法對參數增益進行優化調節,使得在不同路面情況下,控制器具有良好的控制效果。
3.1 控制器參數優化結果
設KBLF=[k1,k2,k3,k4,m1,m3,r1,r2],KQLF=[k1,k2,k3,k4,r1,r2],其優化結果如表3所示。

表3 半車空氣懸架系統參數
3.2 條件1下的隨機路面仿真結果分析
圖3為條件1下的車身俯仰角對比,圖4為條件1下的車身垂向加速度和俯仰角加速度對比。與無控制懸架系統相比,可以看出兩種控制器都能明顯提高車身俯仰角、車身垂向加速度和俯仰角加速度,并且實現車身的快速穩定。同時可以看出條件1下,兩種控制器具有幾乎相同的控制效果,這意味著兩種控制器在零初始條件下具有相同的保守性。
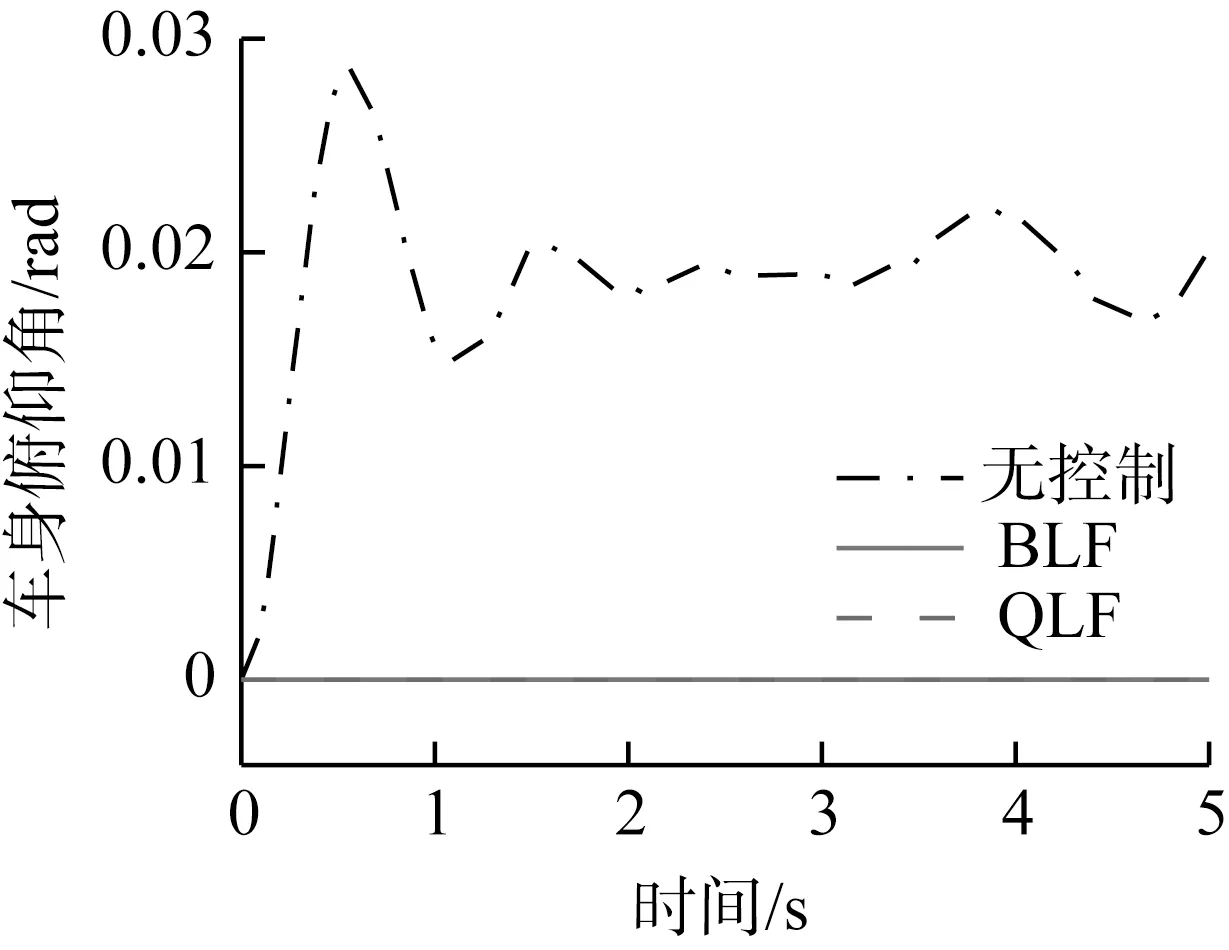
圖3 車身俯仰角對比
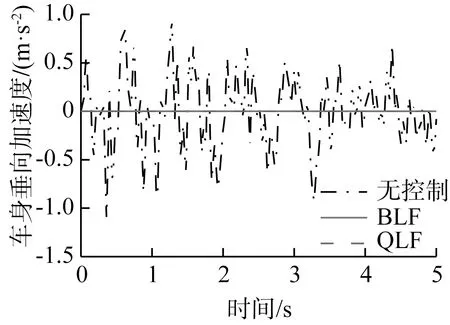
(a) 車身垂向加速度對比
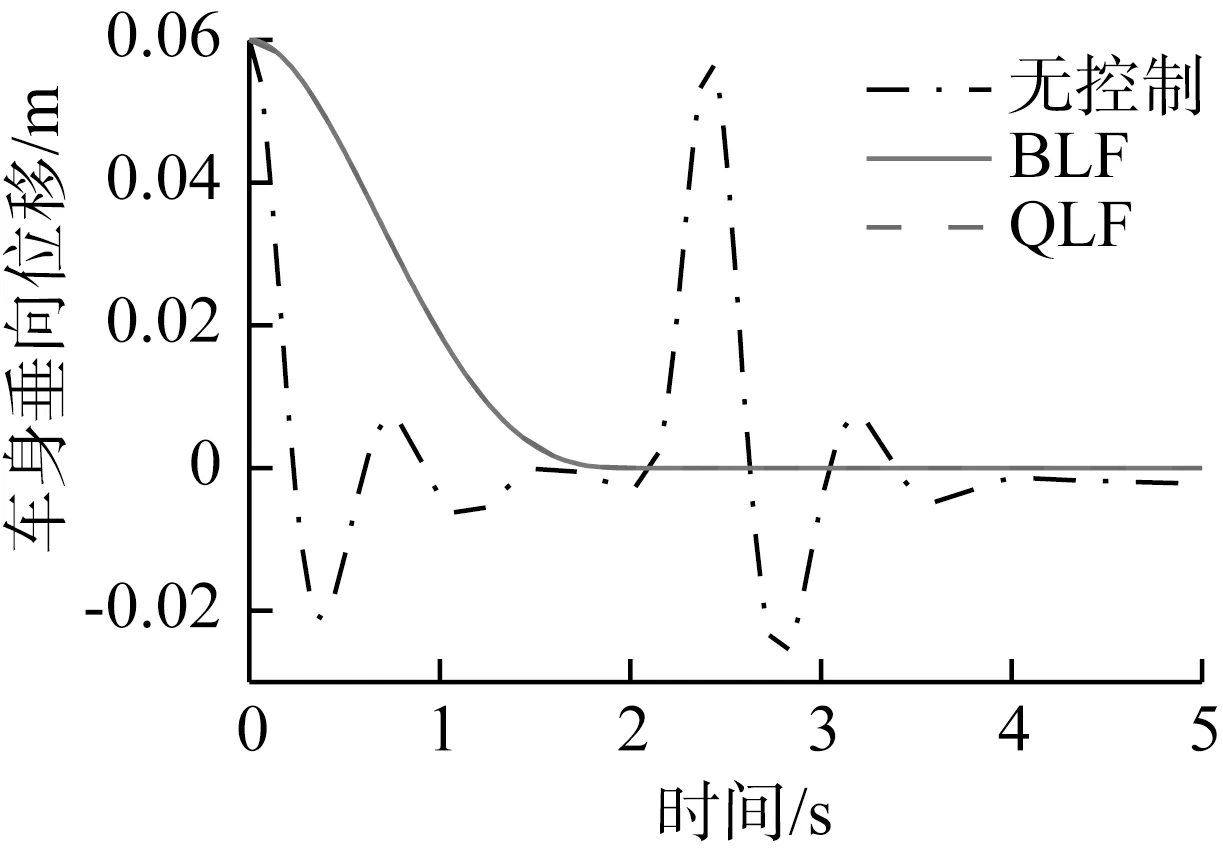
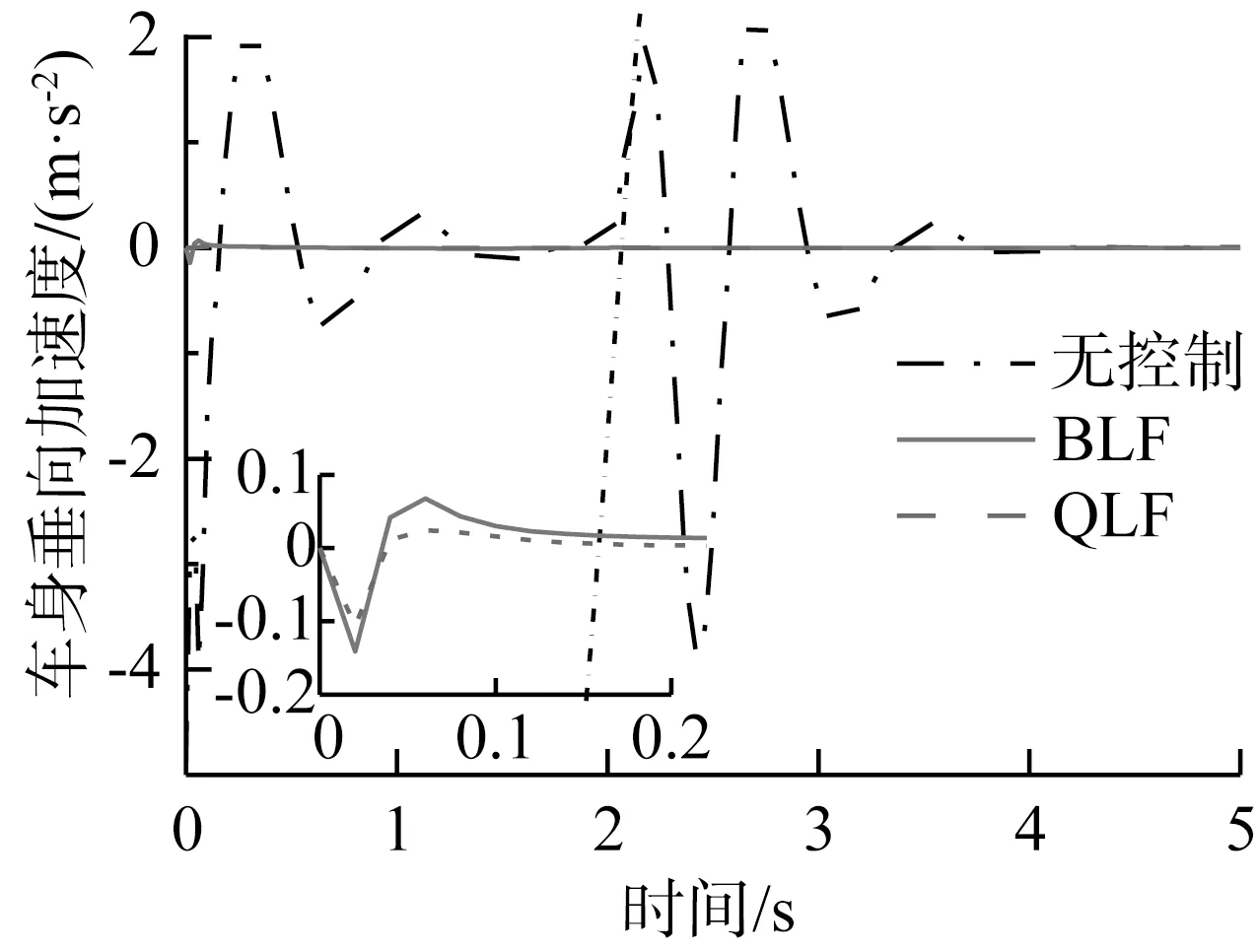
3.3 條件2下的隨機路面仿真結果分析
圖5為條件2下的車身垂向位移和俯仰角的對比,圖6為條件2下的車身垂向加速度和俯仰角加速度對比。從圖中得出,對軌跡曲線的跟蹤兩種控制器都具有良好的效果。并且表4所示,面對外部輸入干擾都顯著地改善了懸架系統的垂向加速度和俯仰角加速度,垂向加速度均方根值相對無控制分別改善了97.78%和98.31%,俯仰角加速度均方根值相對無控制分別改善了96.72%和97.82%。在垂向加速度方面,兩種控制器控制效果幾乎相當;在俯仰角加速度方面,明顯QLF具有比BLF更快的收斂速度,更小的峰值。總的來說,QLF控制器結果比BLF控制器更好。
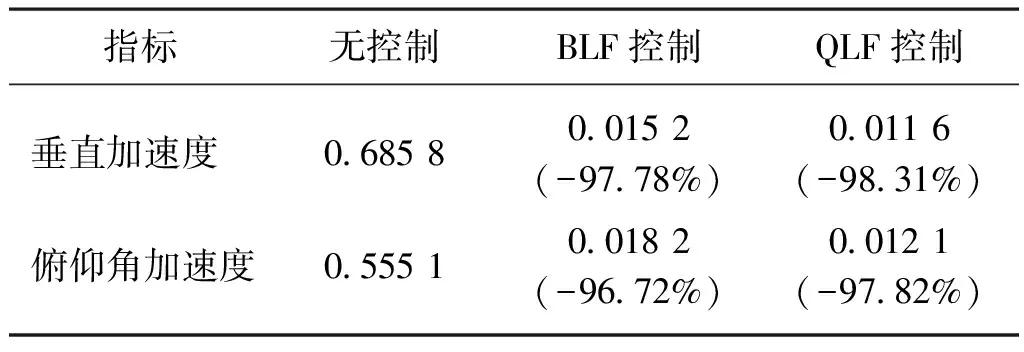
表4 車身垂向加速度和俯仰角加速度均方根對比
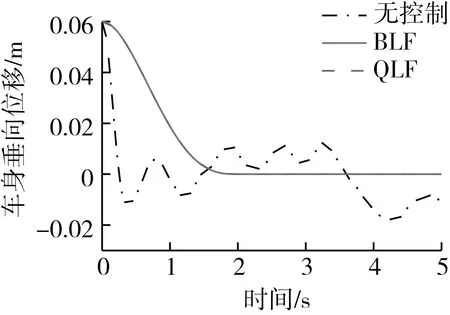
(a) 車身垂向位移對比
(a) 車身垂向加速度對比
3.4 條件1下的顛簸路面仿真結果分析
圖7為條件1下的車身俯仰角對比,圖8為條件1下的車身垂向加速度和俯仰角加速度對比,兩種控制器均能使懸架系統的俯仰角、車身垂向加速度和俯仰角加速度在更短的時間內收斂到穩定的狀態并且滿足設定的安全約束條件。
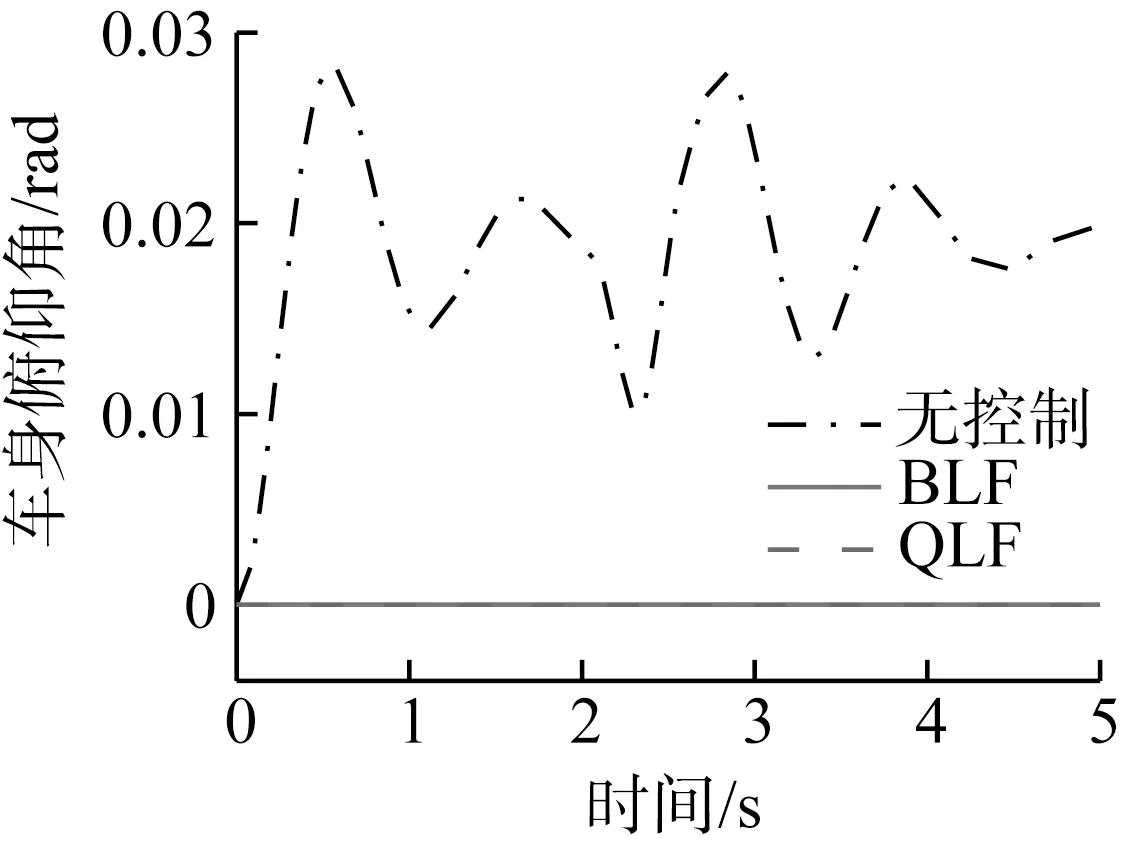
圖7 車身俯仰角對比

(a) 車身垂向加速度對比
3.5 條件2下的顛簸路面仿真結果分析
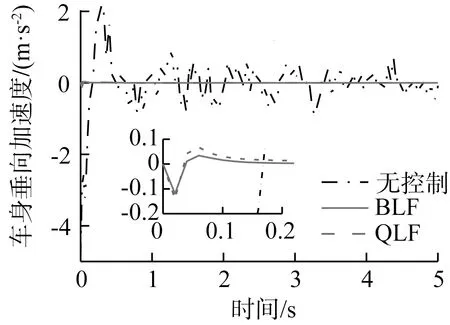
圖9為條件2下的車身垂向位移和俯仰角的對比,圖10為條件2下的車身垂向加速度和俯仰角加速度對比。顯然,兩種控制器對于軌跡曲線都具有良好的跟蹤保持效果,并且表5所示,面對外部輸入干擾都顯著地改善了懸架系統的垂直加速度和俯仰角加速度,垂向加速度均方根值比較無控制分別改善了97.53%和97.93%,俯仰角加速度均方根值較無控制分別改善了93.83%和95.89%。而且相較于BLF控制器,QLF控制器收斂速度更快,垂直加速度和俯仰角加速度峰值更低,控制效果更好。
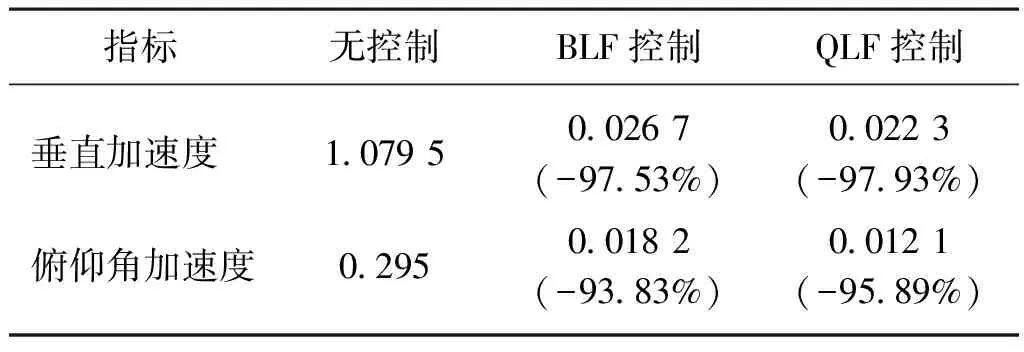
表5 車身垂向加速度和俯仰角加速度均方根對比
(a) 車身垂向位移對比
(a) 車身垂向加速度對比
4 結論
1) 本文建立了1/2車空氣懸架模型,研究了在非緊急制動工況下的半主動空氣懸架的車輛平順性,提出了BLF和QLF兩種方法的自適應反步遞推控制器,在保證系統安全的前提下,利用粒子群算法優化增益參數,在 MATLAB/Simulink中進行了兩種不同路面條件下的仿真分析。
2) 仿真結果表明,在零初始條件下兩種控制器都能極大的改善俯仰角、垂向加速度和俯仰角加速度。在隨機路面非零初始條件下,QLF比BLF具有更小的增益值,車身垂直加速度均方根值分別改善了98.31%和97.78%,車身俯仰角加速度均方根值分別改善了97.82%和96.72%;在顛簸路面非零初始條件下,QLF與BLF控制器對車身垂直加速度均方根值分別改善了97.93%和97.53%,車身俯仰角加速度均方根值分別改善了95.89%和93.83%。綜上所述,QLF控制器在低增益下具有很好的跟蹤效果,懸架性能改善更優,車輛平順性明顯提升。
3) 由于懸架的控制力是一個頻繁變化的曲線,但是空氣彈簧頻繁的充放氣,會帶來一定安全問題,就空氣彈簧與駕駛平順性的綜合考慮是以后需要研究的問題。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32