考慮輪軌黏著的高速列車多目標速度曲線優化
2023-11-16 07:30:50付雅婷朱宏濤
華東交通大學學報 2023年5期
關鍵詞:高速列車
付雅婷 朱宏濤


摘要:高速列車運行環境復雜多變,現有的給定運行速度目標曲線主要考慮列車運行的安全性和正點性,難以改善列車的其他運行性能。為了滿足高速列車日益增加的行車需求,并改善列車的運行性能,針對安全、節能、正點及舒適多個目標,考慮輪軌間最優黏著,提出一種改進的多目標運行速度優化方法。首先,在滿足區間限速以及列車動力學模型約束的前提下,建立安全、節能、正點、舒適4個評價指標,構成高速列車運行過程多目標優化模型;其次,在節能模型中考慮輪軌間黏著的影響,優化牽引/制動力使得其保持在最優黏著范圍內,節約運行能耗;最后,采用基于參考點的非支配排序的優化算法(NSGA-Ⅲ)對多目標運行速度曲線進行優化。對真實線路的仿真驗證表明,本文提出的考慮輪軌黏著的優化效果顯著提高,尤其在節能方面;優化算法相較于GA和NSGA-Ⅱ,NSGA-Ⅲ算法在收斂效果和收斂速度上均為更優。
關鍵詞:高速列車;多目標優化;黏著;NSGA-Ⅲ
中圖分類號:U266 文獻標志碼:A
本文引用格式:付雅婷,朱宏濤. 考慮輪軌黏著的高速列車多目標速度曲線優化[J]. 華東交通大學學報,2023,40(5):59-67.
Multi-Objective Speed Curve Optimization of High-Speed
Train Considering Wheel Rail Adhesion
Fu Yating1,2,3,Zhu Hongtao1,2,3
(1. School of Electrical & Automation Engineering, East China Jiaotong University, Nanchang 330013, China;2. Jiangxi Key Laboratory for Advanced Control and Optimization, East China Jiaotong University,Nanchang 330013, China;3. State Key Laboratory for Performance Monitoring and Guarantee of Rail Transit Infrastructure, East China Jiaotong University,Nanchang 330013, China)
Abstract:The operation environment of high-speed trains is complex and changeable. The existing target curve of given operation speed mainly considers the safety and punctuality of train operation, which is difficult to improve other operation performance of trains. In order to meet the increasing traffic demand of high-speed trains and improve the running performance of trains, this paper proposes an improved multi-objective speed optimization method for safety, energy saving, punctuality and comfort, considering the optimal adhesion between wheels and rails. First of all, on the premise of meeting the restriction of interval speed limit and train dynamics model, four evaluation indexes of safety, energy saving, punctuality and comfort are established to form a multi-objective optimization model of high-speed train operation process; Secondly, the influence of adhesion between wheel and rail is considered in the energy-saving model, and the traction/braking force is optimized to keep it within the optimal adhesion range, so as to save operating energy consumption; Finally, optimization of multi-objective operating speed curve uses reference point based non dominated sorting optimization algorithm(NSGA-Ⅲ). The simulation results of real lines show that the optimization effect considering wheel rail adhesion is significantly improved, especially in energy saving; Compared with GA and NSGA-Ⅱ, the NSGA-Ⅲ algorithm has better convergence effect and convergence speed.
Key words: high speed train; multi-objective optimization; adhesion; NSGA-Ⅲ
Citation format:FU Y T, ZHU H T. Multi-objective speed curve optimization of high-speed trains considering wheel rail adhesion[J]. Journal of East China Jiaotong University,2023,40(5):59-67.
隨著高速列車運行速度以及行車密度的不斷增加,列車運行中需要優化的目標也在不斷增多[1]。高速列車運行過程優化往往需要同時滿足安全、節能、正點、舒適等多個目標,由于這些目標之間存在內部沖突,一個目標的優化往往要以其他目標的劣化為代價[2]。例如為了正點到達車站,行駛中常常加速,則會導致旅客舒適度降低;為了節約能耗,司機盡可能多的采用惰行工況,則會導致列車晚點到站。為此,需要在四個目標中間做出協調和折中處理,不能過分偏袒某一目標,要盡可能使總體的目標達到最優[3]。而列車需要在安全穩定的速度曲線下有序運行并且最大程度地節約列車運行過程中產生的能耗[4]。與此同時,高速列車系統主要的能耗來源于運行過程中牽引/制動力所產生的能耗[5]。而黏著力作為驅使列車運行的最終動力,其上限就是可利用牽引/制動力的最大值。若牽引/制動力超過當前位置的最大黏著力,不僅會降低電機功率,造成極大的能源浪費,而且嚴重時會導致車輪空轉,發生安全事故[6]。若能將牽引/制動力約束在最大黏著力以下,則對降低能耗有著極大的幫助。
針對列車運行過程中的多目標優化問題,以及如何充分利用輪軌間黏著,國內外學者展開了諸多深入的研究與分析。張京[7]將遺傳算法與粒子群優化算法相結合,優化工況轉換點,以此得到最優的速度曲線。張惠茹[8]提出一種改進的非支配排序遺傳算法,并通過實際線路數據生成優化后的節能駕駛曲線。李杰[9]將新型人群搜索算法用于高速列車自動駕駛曲線優化過程。李斌等[10]研究了不同的黏著系數變化引發的列車控制力差異,研究表明輪軌間黏著不足將導致機車的最大牽引力不能有效發揮。吳業慶[11]提出一種辨識最優蠕滑的方法,實現了最大黏著系數的利用,為穩定發揮牽引力提供了指導。Wu[12]研究了牽引過程中低黏著條件下的高速列車輪軌間力相互作用的數值。Xiao[13]提出了一種改進的防滑控制算法用于調整牽引功率,以此確保最大程度地利用輪軌黏著。綜合國內外相關文獻,本文設想是否可以將高速列車運行多目標優化與輪軌間黏著相結合,使得優化效果更好。
本文以高速列車實際線路數據為基礎,將高速列車安全行駛、運行能耗、準點到站、乘坐舒適設為評價指標,區間固定限速條件與列車動力學方程為約束,建立高速列車運行過程多目標優化模型。同時在仿真中設定不同的最大黏著系數以此模擬實際駕駛中列車經過的不同軌面狀況,在節能評價指標中將牽引/制動力超出最大黏著力的部分視為能源浪費。最后利用NSGA-Ⅲ算法對模型進行優化,并與GA算法、NSGA-Ⅱ算法進行對比,驗證方法的有效性和可行性。
1 高速列車縱向動力學模型
1.1 高速列車動力學方程
參考《列車運行控制系統》,對運行過程中的高速列車進行受力分析,得到列車動力學方程
式中:m為列車的質量;t為列車當前運行時間;s為列車當前位置;v為列車當前運行速度;U為電機施加的控制力,(U>0為牽引力,U<0為制動力);f0為基本阻力,可通過列車的牽引/制動特性曲線確定(圖1);fj為附加阻力,由列車當前位置的線路條件(坡道、曲線、隧道)確定,計算如下
式中:wi,wr,ws分別為列車當前所受到的坡道,曲線、隧道附加阻力。坡道附加阻力是列車在坡道上運行時,受到列車重力產生的沿運行方面相反的分力,其表達式如式(3)所示;曲線附加阻力由很多因素有關,難以用理論公式計算,通常采用經驗公式計算,其表達式如式(4)所示;隧道附加阻力亦是用對應的經驗公式求解,其表達式如式(5)所示。
式中:g為重力加速度;BC為標高差;AB為坡道長度;θ為坡道和水平方向的夾角。
式中:R為曲線半徑;g為重力加速度。
式中:Ls為隧道長度。
1.2 多目標評價指標
本文建立4個目標的評價模型。
1.2.1 安全評價指標
高速列車在運行過程中的安全主要體現在不超速運行,其安全評價模型M為
式中:V(l)為高速列車當前位置l所對應的限速;v為當前列車的運行速度;M越小代表其安全性越高。
1.2.2 節能評價指標
將運行線路劃分為數個區段,每段對應著不同的牽引/制動力和走行距離,乘積得到每個區段的能耗,所有區段的累加就是總適應度值[14]。其節能評價模型E為
式中:Ui為當前區段的控制力;ΔSi為當前區段的走行距離。
而在列車運行過程中,輪對與鋼軌之間的黏著系數會隨著蠕滑速度不斷改變。如圖2所示,黏著系數會隨著輪軌間的蠕滑速度先增大到一個峰值點,也就是最大黏著系數,之后再減小。在峰值點處輪軌可以傳遞最大的牽引/制動力,也就是達到了最優黏著利用。峰值點左邊為黏著區,在這部分輪軌間處于黏著狀態,車輪不會打滑,力得到了很好的發揮;峰值點右邊為滑動區,在這部分車輪會發生打滑現象,這時牽引/制動力是無法使用的[15]。
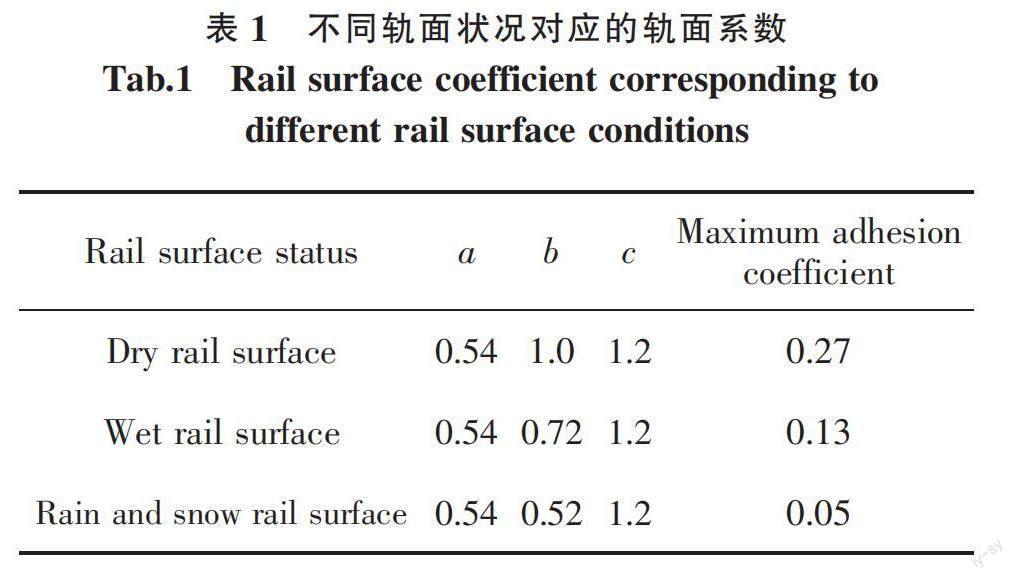
為了保證牽引/制動力得到充分利用,防止能源浪費,應盡可能的讓列車輪軌黏著狀態處于峰值點或左側黏著區。而在運行過程中,列車會經過不同的路況,對應著不同的最大黏著系數[16]。本文考慮是否能在節能模型中加入黏著力的影響,將牽引/制動力超出當前路況的最大黏著力的部分視為浪費,對超出的部分進行優化,使其盡可能的減小,以此達到節能的目的。為了驗證這個想法,本文在仿真中將實驗線路按照里程均分為三段,分別對應雨雪,潮濕,干燥三種軌面狀態,對應的黏著系數可通過式(8)求得。
式中: a、b、c為軌面系數;v為蠕滑速度。
通過大量實驗,學者們計算出不同軌面狀態下的軌面系數,再根據數學公式求出對應的最大黏著系數和黏著特性曲線如表1、圖3所示[17]。
根據表1可知在雨雪、潮濕、干燥三種軌面狀態下的最大黏著系數,接著利用式(9)求出對應的最大黏著力,表達式如下
式中:μ為黏著系數;m為列車質量; g為重力加速度。
綜合上述分析,本文對原先的節能評價模型提出改進,在計算原有能耗的基礎上再考慮當前路況下最大黏著力對于消耗能源的影響。首先求出列車當前時刻所處公里標、運行速度和運行工況;然后計算出對應的最大黏著力、牽引/制動力;接著對前者超出后者的部分進行優化,使其盡可能減小。改進后的節能評價模型表達式如下
式中:Ui為當前區段的牽引/制動力;Fa為當前區段對應的最大黏著力;ΔSi為當前區段的走行距離。
1.2.3 正點評價模型
以列車運行時間與運行圖給定的站間運行時間的差值作為正點評價指標,其正點評價模型為
式中:T0為運行圖給定的站間運行時間;Tu為列車運行時間,兩者越接近越好。Ti為正數代表提前到站,負數代表晚點到站。
1.2.4 舒適評價模型
以兩個相鄰區段的加速度的差值作為舒適度評價指標,其舒適評價模型為
式中:ai為第i個區段的加速度;K越小說明加速度變換的越慢,旅客的舒適度越高。
綜上,高速列車運行過程多目標優化模型如下
式中:t為列車當前運行時間;s為列車當前位置;v為列車當前運行速度;m為列車的質量;U為電機施加的控制力(U>0為牽引力,U<0為制動力);f0 為基本阻力;fj為附加阻力;V(l)為高速列車當前位置 所對應的限速;a為列車當前加速度;amax為允許的最大加速度;V(0)為列車在起點的起始速度;V(S)為列車在終點的最終速度;G(·)為多目標適應度函數;式(14)為模型約束。
2 基于參考點的非支配排序的高速列車多目標優化算法
目前已存在多種多目標優化算法,并在高速列車領域中展示了它們在處理兩個或三個目標上的優勢。隨著高速列車行車密度與駕駛速度不斷增加,列車運行過程中需要優化的目標也隨之增加,傳統的優化算法已經不足以解決新出現的問題,現在越來越需要開發出多目標優化算法來處理多目標(4個或以上目標)優化問題。為此,本文選取基于參考點的非支配排序的優化算法(NSGA-Ⅲ)進行仿真優化。
NSGA-III算法[18]在帶精英策略的非支配排序遺傳算法(NSGA-Ⅱ)的基礎上提出改進。NSGA-Ⅱ算法[19]引入精英策略提高了種群個體的質量,引入擁擠距離保證了種群個體的多樣性,并利用快速非支配排序降低計算的復雜度。然而本文有4個需要優化的目標,需要選擇具備處理4個或以上目標能力的優化算法。同時,當目標函數數量超過三個時,擁擠距離的計算成本較高,計算量極大,NSGA-Ⅲ算法在搜索前已經根據偏好設置好了搜索方向,有效地縮小了多維搜索空間的范圍,極大地降低了算法運算量的同時提高了算法的收斂性。最重要的是在高速列車運行曲線優化中,對每個優化目標會存在不同程度地期望偏好,而NSGA-Ⅲ算法會根據實際需求設置參考點和參考向量,以此達到有偏好的優化,更適用于高速列車優化的背景和本文所構建模型的求解。
2.1 數值求解方法
根據NSGA-Ⅲ優化算法的基本思想,結合高速列車行駛中的實際情況,本文將227.78 km的實驗線路按照線路坡道變化,劃分為0.7~0.8 km長度不一的304個區段,一個區段只能存在一種運行工況并始終保持勻速運行。仿真中每隔0.1 s更新列車的運行速度、所處的公里標和控制工況,結合圖1求出當前列車的牽引/制動力。算法中將劃分的各個區段作為單個個體,對其進行優化,并根據4個目標的適應度值判斷優化是否成功。
基于上述的分析,高速列車運行過程多目標優化算法,具體步驟如下[20]。
Step 1 初始化參數,包括種群數量、迭代次數、交叉率、變異率等,設置結構體存放參數。
Step 2 種群初始化。根據實際線路數據和高速列車相關參數生成50組控制工況序列,判斷其是否符合實際駕駛情況,并計算每組的適應度值和平均適應度值。
Step 3 從50組中選出總適應度值最小的一組作為初始工況序列,作為初始種群P,記錄4個優化目標的適應度值,并生成參考點。
Step 4 對種群P進行交叉、變異操作,得到另一個種群Q,檢測其控制工況序列是否符合實際駕駛情況,并計算4個優化目標的適應度值。
Step 5 合并種群P和種群Q,得到兩倍個體數量的新種群M;
Step 6 將新種群M進行快速非支配排序,得到5個非支配層F1、F2、F3、F4、F5;
Step 7 優先從支配等級高的非支配層中的個體選出下一代種群,若F1、F2、F3、F4、FL(L≤5)層中的個體總數恰好為N,則將以上非支配層中的個體選作下一代種群,同時迭代次數增加1,執行Step 9;若F1、F2、F3、F4、FL(L≤5)層中的個體超過N,則先選擇F1、F2、F3、F4、FL(L≤5)層中的個體作為下一代種群,剩余的個體執行Step 8進行選擇;
Step 8 計算層中每個個體與參考點的差值,按照從小到大的順序依次放入下一代種群,直到數量剛好等于N,則不再選擇個體,生成新種群,同時迭代次數增加1;
Step 9 判斷是否達到設定的迭代次數,若是則終止迭代;否則重復 Step 4至Step 8。
3 仿真實驗結果分析
為了驗證提出的基于參考點的非支配排序優化算法(NSGA-Ⅲ)的改進模型對于高速列車運行過程多目標優化的有效性,本文以京滬高鐵線路上運營的CRH380AL高速列車為實驗對象,基于“泰安—徐州東”的實際運行數據進行仿真實驗,先將改進前后模型的優化結果進行對比,驗證模型的有效性;再將GA算法、NSGA-Ⅱ算法與NSGA-Ⅲ算法的優化結果進行對比,驗證方法的可行性。
仿真區段線路基本參數如表2所示[21]。表2中:v為列車當前運行速度;an為常用制動時運行速度小于300 km/h時的減速度;Sn為常用制動時運行速度小于300 km/h時的制動距離;ae為緊急制動時運行速度小于300 km/h時的減速度;Se為緊急制動時運行速度小于300 km/h時的制動距離。
3.1 實驗結果及分析
圖4給出了CRH380AL高速列車某次在“泰安—徐州東”區間內運行的速度-里程(V-S)曲線。其中,兩站間的距離為227.78 km,運行圖中給定的站間運行時間為3 088 s,可接受的提前/晚點范圍為120 s[22]。
根據實際線路中的相關數據,計算出初始條件下4個目標的適應度值,如表3所示。
結合圖4和表3可知列車運行過程中仍存在優化空間。例如對于安全目標,列車在制動過程中速度幾乎接近當前路段的限制速度,存在很大的安全隱患;對于正點目標,速度過高導致時間超過了可接受的范圍;對于節能目標有很大的改善空間。
為了提高列車運行過程中的整體效果,本文中在考慮輪軌間黏著的基礎上,對節能評價模型作出了改進,并使用NSGA-Ⅲ算法對4個目標進行仿真實驗,得到優化后的速度-距離曲線如圖5所示。
優化仿真過程中進行了100次算法迭代,其總適應度值變化如圖6所示。
將迭代100次后的結果進行計算,得到優化后的四項評價指標參數值,如表4所示。
通過圖6可以直觀地看出,列車在制動過程中,優化后的制動速度遠遠低于當前路段的限制速度,安全性能大大增加。對比表3表4可知,優化后所有的評價指標均得到提升,運行曲線安全性更高、能耗減少了一半左右、到站時間更接近運行圖給定的站間運行時間、舒適度也大幅度提升。為了進一步說明本文方法的有效性,下面將從模型和算法兩個方面進行對比。
3.2 模型的對比
改進的節能評價模型為式(6),在式(3)的基礎上考慮了不同軌面的黏著系數,將牽引/制動力超出最大黏著力的部分視為能源浪費進行優化,以此達到更好的節約能耗效果。為了驗證改進模型的有效性,接下來用未改進的節能評價模型進行優化,得到結果如下所示。
通過表5可以得出,未改進的節能評價指標比改進后的節能評價指標增加了20.76%,總適應度值增加了14.38%。仿真結果說明改進后的節能模型降耗成效顯著,考慮不同軌面狀態下的黏著力對提高能源開發利用、有效抑制不合理的能源浪費至關重要。
3.3 算法的對比
為了驗證NSGA-Ⅲ算法是否適用于優化高速列車運行過程中的目標曲線,本文選擇GA算法與NSGA-Ⅱ算法作為對比對象,從收斂速度、收斂結果兩個方面進行比較,以此驗證NSGA-Ⅲ算法的可行性。
根據上述優化結果可以看出:從評價指標來判斷,NSGA-Ⅲ算法的精度明顯要高于 NSGA-Ⅱ算法和GA 算法,且收斂速度更快。NSGA-Ⅱ算法容易陷入局部最優,全局尋優能力低于NSGA-Ⅲ算法。這說明NSGA-Ⅲ算法相較于其他兩種算法具有顯著的優越性。
4 結論
針對高速列車運行過程中的多目標優化問題,本文分析了列車受力情況,在滿足區間固定限速以及車輛動力學方程約束的條件下,建立了行車安全、包含不同軌面狀況下最大黏著力約束的能源消耗、準點到站、旅客乘坐的舒適度等4個評價指標,構成高速列車運行過程多目標優化模型。結合高速列車運行過程中的行車特點,選擇基于參考點的非支配排序算法優化目標曲線。仿真中以“泰安—徐州東”站間為基礎數據,對初始的實際線路進行優化,最終結果優化后4個評價指標都有所提升,尤其是節能評價指標。并且為了說明本文方法的有效性和可行性,在模型和算法方面均做了對比,結果顯示本文改進的節能模型對于降耗有著顯著作用,考慮輪軌間的黏著對于高速列車多目標優化有極大的幫助;NSGA-Ⅲ算法在收斂速度和收斂效果都有極大的優勢,非常適用于高速列車優化的實際領域。
參考文獻:
[1] 宋鴻宇,上官偉,盛昭,等. 基于彈復力調整的高速列車群動態運行軌跡優化方法[J]. 交通運輸工程學報,2021,21(4):235-250.
SONG H Y,SHANGGUAN W,SHENG Z,et al. Optimization method of high-speed train group dynamic operation trajectory based on resilience adjustment[J]. Journal of Transport Engineering,2021,21(4):235-250.
[2] GU Q,TANG T,CAO F,et al. Energy-efficient train operation in urban rail transit using real-time traffic information[J]. IEEE Transactions on Intelligent Transportation Systems,2014,15(3):1216-1233.
[3] 閆璐,張琦,丁舒忻,等. 基于雙目標優化的高速鐵路列車運行調整[J]. 中國鐵道科學,2022,43(2):161-171.
YAN L,ZHANG Q,DING S X,et al. High speed railway train operation adjustment based on double objective optimization[J]. China Railway Science,2022,43(2):161-171.
[4] 賈寶通,孟學雷,賈飛,等. 面向節能的高速列車追蹤控制方案研究[J]. 鐵道科學與工程學報,2021,18(8):1986-1996.
JIA B T,MENG X L,JIA F,et al. Research on energy-saving oriented high-speed train tracking control scheme[J].Journal of Railway Science and Engineering,2021,18(8): 1986-1996.
[5] YANG X,LI X,NING B,et al. A survey on energy-efficient train operation for urban rail transit[J]. IEEE Transactions?on Intelligent Transportation Systems,2015,17(1):2-13.
[6] 徐傳芳,陳希有,鄭祥,等. 基于動態面方法的高速列車蠕滑速度跟蹤控制[J]. 鐵道學報,2020,42(2):41-49.
XU C F,CHEN X Y,ZHENG X,et al. Creep speed tracking control of high-speed trains based on dynamic surface method[J]. Journal of Railways,2020,42(2):41-49.
[7] 張京,朱愛紅. 基于遺傳算法和粒子群優化的列車自動駕駛速度曲線優化方法[J]. 計算機應用, 2022,42(2):599-605.
ZHANG J,ZHU A H. Optimization method of automatic train operation speed curve based on genetic algorithm and particle swarm optimization[J]. Computer Application,2022,42(2):599-605.
[8] 張惠茹,賈利民,王莉. 基于Pareto多目標優化的高速鐵路列車節能駕駛曲線集生成[J]. 鐵道學報,2021,43(3):85-91.
ZHANG H R,JIA L M,WANG L. Generation of energy-saving driving curve set for high-speed railway trains based on Pareto multi-objective optimization[J]. Journal of Railways, 2021,43(3):85-91.
[9] 李杰. 基于多質點模型的高速列車追蹤運行ATO多目標優化研究[D]. 蘭州:蘭州交通大學,2021.
LI J. Research on ATO multi-objective optimization of high-speed train tracking operation based on multi particle model[D]. Lanzhou:Lanzhou Jiaotong University,2021.
[10] 李斌,楊忠良,羅世輝,等. 考慮輪軌黏著變化的貨運列車縱向動力學仿真[J]. 振動測試與診斷,2021,41(6):1059-1065.
LI B,YANG Z L,LUO S H,et al. Longitudinal dynamics simulation of freight train considering wheel rail adhesion change[J]. Vibration Testing and Diagnosis,2021,41(6):?1059-1065.
[11] 吳業慶,趙旭峰,喻勵志,等. 基于最優蠕滑辨識的高速列車黏著控制研究[J]. 機車電傳動,2020(2):12-16.
WU Y Q,ZHAO X F,YU L Z,et al. Study on adhesion control of high-speed trains based on optimal creep identification[J]. Electric Drive of Locomotive,2020(2):12-16.
[12] WU B,XIAO G,AN B,et al. Numerical study of wheel/rail dynamic interactions for high-speed rail vehicles under?low adhesion conditions during traction[J]. Engineering?Failure Analysis,2022,137:106266.
[13] XIAO G,WU B,YAO L,et al. The traction behavior of high-speed train under low adhesion condition[J]. Engineering Failure Analysis,2022,131:105858.
[14] 趙輝,代學武. 基于閉塞區間的高速列車運行時間與節能協同優化方法[J]. 自動化學報,2020,46(3):471-481.
ZHAO H,DAI X W. Collaborative optimization method of high-speed train operation time and energy saving based on block section[J]. Acta Automatica Sinica,2020,46(3):471-481.
[15] WU B,WU T,AN B Y. Numerical investigation on the high-speed wheel/rail adhesion under the starved interfacial contaminations with surface roughness[J]. Lubrication?Science,2020,32(3):93-107.
[16] SHI L,MA L,GUO J,et al. Influence of low temperature environment on the adhesion characteristics of wheel-rail contact[J]. Tribology International,2018,127:59-68.
[17] 李中奇,張俊豪. 基于快速自適應超螺旋算法的高速列車最優黏著控制[J]. 鐵道科學與工程學報,2022,19(8):2143-2150.
LI Z Q,ZHANG J H. Optimal adhesion control of high-speed trains based on fast adaptive super spiral algorithm [J]. Journal of Railway Science and Engineering,2022,19(8):2143-2150.
[18] DEB K,JAIN H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach[J]. IEEE Transactions on Evolutionary Computation,2014,18(4):577-601.
[19] DEB K. Multi-speed gearbox design using multi-objective evolutionary algorithms[J]. Journal of Mechanical Design,?2003,125(3):609-619.
[20] 付雅婷,原俊榮,李中奇,等. 基于鉤緩約束的重載列車駕駛過程優化[J]. 自動化學報,2019,45(12):2355-2365.
FU Y T,YUAN J R,LI Z Q,et al. Optimization of heavy haul train driving process based on coupler draft constraint [J]. Journal of Automation,2019,45(12):2355-2365.
[21] LU W,QIN S S,MU Z G,et al. Simulation study on evacuation of CRH380AL high-speed train and its influencing factors[J]. China Safety Science Journal,2020,30(8):164.
[22] 張欣欣. 高速列車運行控制[M]. 北京:北京交通大學出版社,2012.
ZHANG X X. High speed train operation control[M]. Beijing:Beijing Jiaotong University Press,2012.
通信作者:付雅婷(1988—),女,副教授,博士,碩士生導師,青年井岡學者,研究方向為軌道交通優化運行與智能運維。E-mail:fuyating0103@163.com。
(責任編輯:姜紅貴)
猜你喜歡
電子技術與軟件工程(2017年3期)2017-03-22 23:26:37
科技創新與應用(2017年5期)2017-03-16 22:04:54
科技創新導報(2016年29期)2017-03-15 09:27:22
科技資訊(2016年29期)2017-02-28 14:36:58
物聯網技術(2016年9期)2016-11-09 19:09:44
計算機輔助工程(2016年3期)2016-08-01 07:45:56
科技傳播(2016年7期)2016-04-28 00:00:02
中國科技博覽(2016年7期)2016-04-25 10:15:44
中國科技博覽(2016年14期)2016-04-25 09:55:10
計算機輔助工程(2016年1期)2016-03-15 12:38:24