基于視頻檢測的低等級公路交叉口交通沖突預警技術研究
2023-11-17 08:29:12翟亞東賀海軍楊卓敏王倩倩
交通科技與管理 2023年21期
翟亞東,劉 凡,賀海軍,楊卓敏,王倩倩
[1.新疆大學交通運輸工程學院,新疆 烏魯木齊 830017; 2.新疆維吾爾自治區公安廳交通警察總隊,新疆 烏魯木齊 830000;3.公安部交通管理科學研究所(道路交通安全公安部重點實驗室),江蘇 無錫 214151]
0 引言
農村低等級公路是我國交通網絡的重要組成部分,由于缺乏基礎設施和交通信號燈等,存在較大的安全隱患,為解決這一問題,落實《交通強國建設綱要》[1],交通運輸部印發了《農村公路中長期發展綱要》[2],提出了加強農村公路交通安全管理隱患治理的措施。所以在低等級公路交叉口設計沖突預警平臺是有必要的。
目前應用在低等級交叉口的交通沖突預警技術研究較少,該文基于車輛實時駕駛場景,以低等級T 形交叉口為例,研究了一種交通沖突預警技術,并搭建了低等級公路交叉口交通沖突預警平臺。
1 基于yolo v3 卷積神經網絡構建車輛檢測模型
1.1 建立五種車輛類型在不同場景下的樣本庫
不同類型的車輛在實際運行的路況中,制動性、操縱穩定性、承載性等因素具有較大差異,根據低等級公路常見的車輛類型,通過錄制低等級公路駛向交叉口的車輛視頻,經過視頻抽幀后,將圖片保存為jpg 文件格式,制作五種車輛類型的圖像集,如圖1 所示。在眾多的環境因素中,天氣因素對駕駛員的駕駛行為、視頻檢測效果的影響最為明顯,如雨雪天、霧天、高溫天、大風天等其他惡劣天氣。根據視頻車輛檢測的日常環境影響因素考慮,采集了五種場景下的車輛樣本,如圖2 所示。

圖1 五種車輛類型

圖2 五中場景下的車輛樣本庫
1.2 yolo v3 卷積神經網絡訓練模型
所采用的yolo v3 卷積神經網絡結構的backbone為Darknet-53,卷積神經網絡中存在大量的殘差結構Residual,網絡的輸入尺度是416×416,卷積層輸出的特征圖尺度為13×13,通道數為1 024。在yolo v3 中,Darknet-53 網絡只用于提取特征,并且輸出了三種不同尺度的特征圖13×13、26×26、52×52。
該算法通過輸入圖像數據集,將處理好的圖片批量放入yolo v3 卷積神經網絡中VOCdevkit 的JPEGImages 文件夾中;將標注后生成的xml 文件批量存放在Annotations 文件夾中。對其實現圖像增強,構建神經網絡,將圖像增強處理后的數據集輸入神經網絡中,運行train.py 程序訓練后輸出權重參數文件,存儲在logs 文件夾中;調整相關參數后,運行算法程序進行訓練。
統計車輛樣本庫經卷積神經網絡訓練后五種車輛類型在各環境下的識別率,如表1 所示。
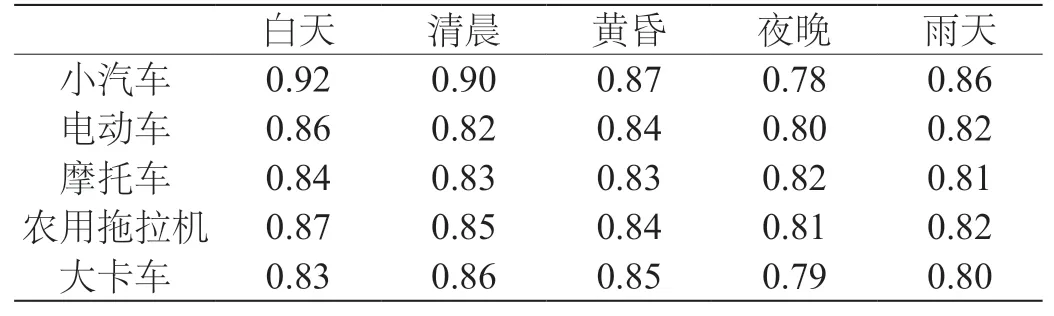
表1 五種車輛類型在不同環境下的識別率
1.3 構建車輛檢測模型
yolo v3 卷積神經網絡中,predict.py 將單張圖片預測、攝像頭檢測等功能整合到了一個python 文件中,通過指定mode 進行模式的修改。基于要實現的視頻檢測功能,則指定mode 為video 進行視頻檢測,構建車輛檢測模型。
2 低等級公路的接入口管理分析
2.1 支路接入口管理的基本概念
(1)接入管理的定義是指針對特定的道路,以低等級公路與支路相接為例,對所接入的支路進行一系列系統的控制,對維護道路通暢及安全發揮了重要的作用[3]。
(2)接入管理的目的是在保證低等級公路運輸系統高效和安全的前提下,對道路周邊地區所接入支路產生的交通需求,進行更安全、有效地接入。
2.2 支路接入口管理主要措施
研究低等級公路與其相接支路的交通運行管理方式后,總結出公路交通運行管理的總體思路是在服務遠距離通行需求的可達道路時,注重道路流動性,保證主路優先通行原則。根據車輛實際駕駛場景,支路與低等級公路相接形成小接入口。無論十字路口還是T 形交叉口,該文均只考慮靠近支路一側的低等級公路與其相接的支路。
3 低等級公路交叉口沖突區域分析
3.1 交通沖突的基本概念
交通沖突是指在可觀測的條件下,兩個或兩個以上道路使用者在同一時間、空間上相互接近,如果其中一方采取非正常的交通行為,如轉換方向、改變車速、突然停車等,除非另一方也相應采取避險行為,否則,將會發生碰撞[4]。
3.2 交叉口沖突點分析
分析靠近支路的低等級公路車輛可能與支路上的車輛產生的沖突點,在實際駕駛場景中,當駕駛員面臨支路接入方向的交通沖突時,由于未獲取到支路上的路況信息,不能及時采取減速、停車駕駛操作,很可能會造成交通事故。主要沖突點是由支路車輛左轉、右轉與靠近支路的低等級公路車輛直行所構成,于是針對支路方向進行預警,防止支路車輛直接駛入交叉口沖突區域。
4 沖突預警平臺設計
4.1 支路車輛的駕駛行為分析
在支路車輛接近交叉口時,駕駛員的駕駛行為會經歷三個階段,一是接收預警階段;二是駕駛決策階段,判斷是否要進行減速、停駛駕駛操作;三是減速停駛階段,避免直接駛入交叉口,與低等級公路車輛產生沖突。
4.1.1 接受預警階段
駕駛員接受支路沖突預警平臺的聲光預警信號。在行駛至低等級公路交叉口時,駕駛員會注意到可能有沖突車輛進入交叉口,即低等級公路左側的交通沖突。其次由于駕駛員接受預警信號不及時等原因,導致接受預警階段持續時間延長,則可能會影響接下來的駕駛行為決策。
4.1.2 駕駛決策階段
駕駛員在此階段觀測道路路況并做出決策。當駕駛員接收到聲光沖突預警信號時,根據實際道路狀況判斷是否需要減速或停車等操作。整個決策過程車輛保持原有的駕駛狀態,此過程需要駕駛員在短時間內做出決策,否則會影響下一階段的駕駛操作。
4.1.3 減速停駛階段
駕駛員進行實際的車輛駕駛操作和控制。駕駛員需要留意低等級公路方向和支路上的車輛行駛狀態,采取減速、停車等駕駛操作,以確保支路上的車輛不進入交叉口沖突區域。所駕駛車輛的速度將會發生顯著變化,直至支路沖突預警平臺的聲光預警信號消失后,沖突狀態才會改變。
4.2 交叉口視距三角形
考慮低等級公路的特殊性,因其不完善的交通設施及較小的交通量,不設置交通信號燈及相關標志標線,若存在視距被遮擋的情況,會容易在交叉口發生交通事故。許多與支路相接構成的交叉口則可稱為主路優先控制交叉口。
該文所提到的主路優先控制交叉口是指對低等級公路采取主路優先控制管理手段的交叉口,根據道路交通安全隱患處理的要求,交叉口的視距三角區如果被樹木或者建筑遮擋,如圖3 所示,應需延長視距。
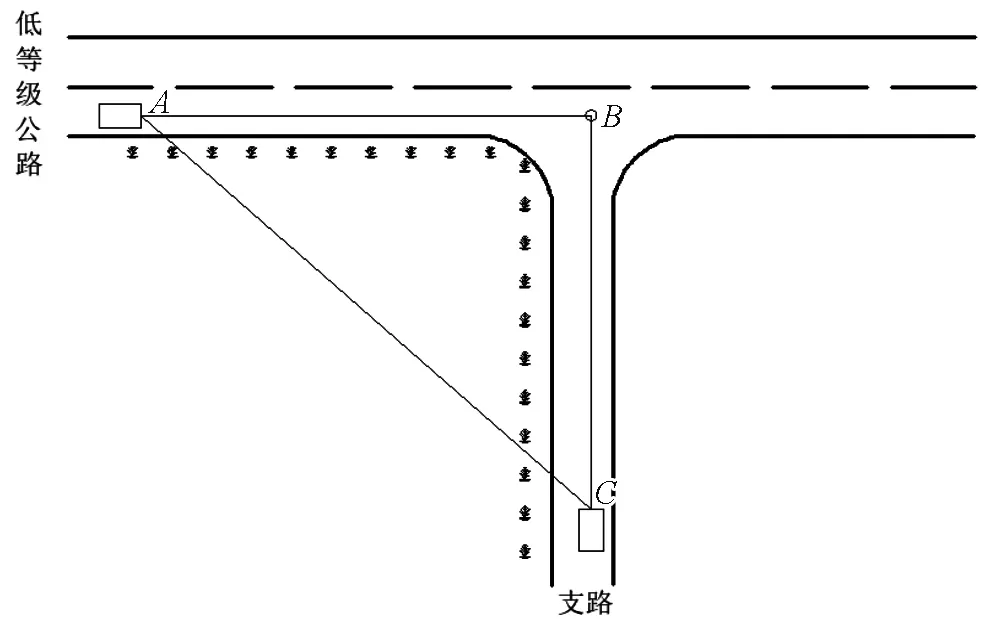
圖3 交叉口的視距三角區ΔABC
若考慮最不利的情況,則交叉路口的視距三角形由低等級公路最靠右側車道的中軸線和相交支路靠近道路中心線的直行車道所確定。該文的沖突預警平臺可作為延長交叉口安全視距的設備,則支路方向的預警平臺及車輛的視距采用停車視距,我國低等級公路的設計速度及停車視距如表2 所示。

表2 我國低等級公路的設計速度及停車視距
4.3 支路沖突預警平臺位置設置
根據駕駛員的駕駛行為,確定沖突預警平臺的設置位置應在支路接入口右側。針對低等級公路方向車輛進行識別檢測,當視頻檢測平臺檢測到低等級公路有車輛駛向時,聲光預警平臺對支路車輛進行預警,預警信號直至低等級公路車輛駛出交叉口沖突區域停止,以提醒支路車輛減速慢行。
按照支路駕駛員看到交叉路口預警平臺發出的預警信號,采取減速、停駛駕駛操作的安全停車距離公式,如公式(1):
式中,s——安全停車距離(m);s1——反應距離,指駕駛員發現前方的阻礙物,經過決策后采取制動措施的那一瞬間到制動器真正開始起作用的那一瞬間汽車所行駛的距離(m);s2——制動距離,汽車完全剎停所走的距離(m);v——車輛行駛限速(m/s);t——駕駛員反應時間,一般取t=2.5s;φ——路面與輪胎間的附著系數,一般按路面在潮濕狀態下的值計算;ψ——道路阻力系數。
式(1)中,φ+ψ為摩擦系數,正常情況下,干燥水泥路面的摩擦系數為0.6~0.7,由此計算得出支路方向的安全停車距離為28.12 m。此外,當車輛通過交叉口時,應在30~50 m 的地方減低速度,若僅考慮道路最高限速,支路聲光預警平臺的設置距離滿足50 m 即可,如圖4所示。
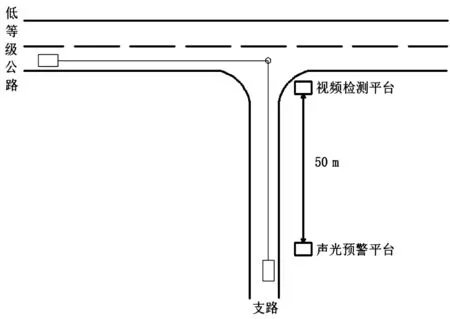
圖4 交叉口聲光預警平臺的設置距離
4.4 搭建沖突預警平臺
將已構建的車輛檢測模型放入視頻檢測平臺中,并設計沖突預警平臺中的報警系統,采用LED 燈及蜂鳴器的聲光預警方式。信號繼電器與視頻檢測平臺、聲光預警平臺一起,可以組成程序控制線路,實現自動化運行。相關設計流程圖如圖5 所示。
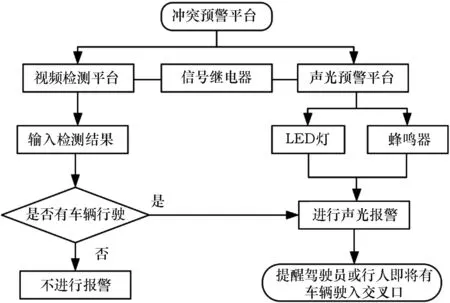
圖5 沖突預警平臺設計流程圖
若沖突預警平臺判斷低等級公路方向有車輛駛向交叉口時,如圖6 所示。聲光預警平臺將檢測的結果以信號燈亮燈、蜂鳴器報警的方式進行輸出(持續至低等級公路車輛駛離交叉口沖突區域),以提醒支路駕駛員小心慢行,有車輛即將駛入交叉口。

圖6 低等級公路方向車輛駛向交叉口
5 結論與展望
該文進行了低等級公路交叉口沖突預警技術的研究,使用了基于yolo v3 的視頻檢測算法,構建視頻檢測模型后,針對低等級公路方向的車輛進行識別,并對沖突預警區域進行分析,包括接入口管理和沖突區域分析。確定了沖突預警平臺的設置位置和觸發控制條件。對支路方向的機動車、非機動車、行人進行預警,在支路駕駛員接收到沖突預警平臺發出的聲光預警信號后,進行減速、停駛的駕駛操作,以確保支路的車輛和行人不進入到交叉口沖突區域中,保障了低等級公路方向主路優先通行的原則,也保證了支路的車輛和行人的安全。但研究仍存有不足,還需進一步完善:文中提出了沖突預警平臺的設計理念,但在實施過程中需要考慮低等級公路方向車輛的車速閾值,以確定在達到何種閾值時觸發聲光預警,提高駕駛員對沖突預警平臺的信任度。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
商品與質量(2021年43期)2022-01-18 05:31:32
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
石油瀝青(2021年4期)2021-10-14 08:50:40
人民交通(2019年16期)2019-12-20 07:04:10
中國公路(2017年12期)2017-02-06 03:07:33
海峽科技與產業(2016年3期)2016-05-17 04:32:12
