融合區域邊緣特征的雙重自適應圖像水印算法
2023-11-17 13:26:04牛保寧蘭方鵬牛之賢郜卓杰
西安電子科技大學學報 2023年5期
關鍵詞:區域
郭 娜,黃 櫻,牛保寧,蘭方鵬,牛之賢,郜卓杰
(1.太原理工大學 信息與計算機學院,山西 太原 030026;2.北京郵電大學 人工智能學院,北京 100089;3.中國科學院自動化研究所,北京 100190)
1 引 言
網絡媒體的發展給在人們帶來便利的同時,也出現了數字作品被抄襲、非法傳播等現象,從而引發版權糾紛。圖像水印技術將代表圖像作品版權的水印信息不可感知地隱藏在圖像作品中,在發生版權糾紛時,可將其提取出來,用于認證作品版權。水印技術能夠有效地用于版權保護的關鍵在于嵌入的水印不影響圖像作品質量(不可見性),同時有抵抗各種攻擊的能力(魯棒性)。
局部水印技術將水印嵌入在圖像的局部區域中,通常利用特征點定位水印的嵌入區域。目的是利用特征點的不變性,使這些特征點定位的區域在攻擊前后盡量保持不變。但特征點的不變性并不是絕對的,當攻擊強度較大時,特征點的個數、位置、尺度和強度等信息均可能發生變化。因此,攻擊前后定位區域的位置和尺寸存在偏差在所難免。由于定位偏差會導致區域中包含的內容發生變化,破壞水印與區域之間的對應關系,使得難以完全正確地提取其中的水印信息。圖像邊緣是指圖像灰度值不連續或灰度值變化劇烈的像素集合,其附近像素灰度值差異明顯。若定位的水印嵌入區域中包含較多的圖像邊緣,當發生定位偏差時,區域中內容變化更為顯著,從而進一步增加了水印提取的難度。
為解決上述問題,筆者提出了一種融合區域邊緣特征的雙重自適應圖像水印算法。首先考慮在定位嵌入區域時盡量避開圖像邊緣,減少對水印提取魯棒性的影響;當嵌入區域仍包含少量圖像邊緣時,盡可能增加邊緣位置的嵌入強度,提高抵抗定位偏差的能力;同時在水印嵌入時根據像素類型設置對應的修改量,保證水印不可見性。該算法的主要創新點如下:
(1) 提出基于多特征評分的嵌入區域判定方法。利用滑動窗口遍歷圖像,以窗口區域的邊緣特征為主,紋理、灰度、位置等因素為輔進行評分,選取得分較高的多個局部區域作為水印嵌入區域。該方法能夠盡可能地避開邊緣,同時兼顧圖像內容,提高水印提取的魯棒性和不可見性。
(2) 提出一種雙重自適應嵌入方案。第一重粗粒度自適應方案通過線性回歸分析,建立用于控制水印嵌入強度的參數和圖像塊邊緣像素數量間的函數關系,根據這一關系自適應地調節每個圖像塊的水印嵌入強度,增強包含邊緣圖像塊嵌入水印的魯棒性;第二重細粒度自適應方案是指在圖像塊中嵌入水印時,針對邊緣處像素和非邊緣處像素設置不同的修改量,進一步利用高斯窗自適應地調整邊緣附近像素的修改量以達到平滑過渡的效果,利用邊緣的掩蔽效應提升水印的不可見性。
2 相關工作
根據水印在圖像中嵌入的位置不同,水印技術可分為全局水印技術[1-3]和局部水印技術[4-7]。全局水印技術將水印直接嵌入在一幅完整的圖像中,裁剪會使圖像的部分像素被刪除,這必然導致嵌入在其中的水印無法提取。局部水印技術是在圖像的多個局部區域中嵌入水印,即便部分區域被裁剪,仍然可能存在不受影響的嵌入區域,能夠很好地抵抗裁剪攻擊;通過在多個區域中嵌入相同的水印還可以進一步提高魯棒性;除嵌入區域以外的像素不會因水印嵌入而發生變化,也能夠使嵌入水印的圖像擁有更好的視覺效果。
局部水印技術首先需要定位水印的嵌入區域。現有方法通常從圖像中提取具有平移、旋轉和尺度不變性的特征點作為參考點,在其定位的非重疊的區域中嵌入水印。NASIR等[6]采用基于終止(end-stopped)小波的特征提取方法來提取重要的幾何不變特征點,將這些特征點用作水印嵌入和檢測之間的同步標記,水印被嵌入到以特征點為中心的非重疊歸一化圓形圖像中。HOU等[4]利用尺度不變特征變換 (Scale-Invariant Feature Transform,SIFT)從宿主圖像中提取穩定特征點,根據其特征尺度和方向自適應地確定局部特征區域用于嵌入水印。AGARWAL等[5]基于圓的對稱特性,將水印嵌入到SURF(Speeded Up Robust Features)特征點定位的圓形區域中。此類基于特征點的水印算法的問題在于,嵌入區域的定位及同步與特征點的穩定性緊密相關,圖像被攻擊前后定位的嵌入區域可能不一致。若定位位置稍有偏差,將會對水印提取的準確率造成嚴重影響。FANG等[7]雖然通過修改SIFT特征點的強度信息來提升其定位的魯棒性,但同時又破壞了圖像的視覺質量。此外,特征點通常是圖像中比較顯著的點,更容易出現在邊緣的位置上,意味著特征點定位的區域中通常會包含圖像邊緣,當發生定位偏差時,進一步影響水印提取的魯棒性。
局部水印技術在確定好水印嵌入區域后,在區域中執行與全局水印技術相同的水印嵌入和提取操作。根據水印嵌入時處理的域不同,還可分為空間域水印和變換域水印。空間域水印技術[8-9]通過直接修改圖像像素來嵌入水印,實現簡單,執行快速,具有較低的時間復雜度,但由于水印嵌入過程是在圖像像素上直接進行,導致其對圖像像素值的變化比較敏感,抵抗攻擊的能力有限。變換域水印技術[10-11]首先執行域變換,再通過修改變換域的系數來嵌入水印,常見的域變換方法有離散余弦變換(Discrete Cosine Transform,DCT)、離散小波變換(Discrete Wavelet Transform,DWT)等。雖然域變換會帶來額外的時間開銷,并且實現起來更加復雜,但其利用了圖像的頻域特性,相比空間域水印技術會具有更好的不可見性和魯棒性。
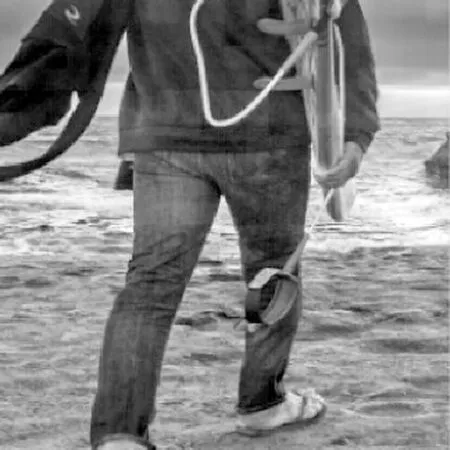
為了有效結合空間域和變換域各自的優勢,在保證水印的魯棒性的同時提高執行效率,LV等[12]提出了一種基于DC系數的自適應量化索引調制方法(AVAS),通過量化圖像塊DCT域中的 DC 系數來嵌入和提取水印。由于DC系數與圖像均值相關,通過在空間域直接計算每個圖像像素的修改量,實現在圖像塊 DC 系數中嵌入和提取水印的效果。該算法不僅執行高效,能夠有效抵抗縮放攻擊,并且對各種常見的攻擊也能夠表現出很好的魯棒性。然而,若在定位的區域中采用AVAS進行水印的嵌入與提取,當發生定位偏差時,若圖像塊中的紋理相對一致,定位偏差對其均值影響不大,若圖像塊中包含邊緣,由于邊緣兩側像素灰度值相差較大,定位偏差將導致其均值發生較大的變化。如圖1所示,使用AVAS在圖1(a)所示的區域中嵌入水印,之后在圖像中將區域尺寸增大1個像素同時向左平移1個像素,圖1(b)為從中提取水印的情況,白色表示水印提取正確的圖像塊,黑色表示水印提取錯誤的圖像塊。由此看出,微小的定位偏差也會對水印提取的正確性造成嚴重的影響,并且提取錯誤明顯發生在包含邊緣的圖像塊。
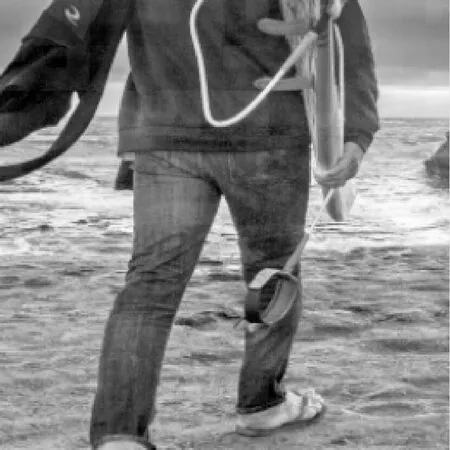
(a) 原始圖像

(b) 水印出錯位置
在嵌入水印時,水印的嵌入強度由算法中設置的一個嵌入參數決定,該參數值影響著水印的魯棒性和不可見性。現有大多數水印算法[13-15]根據經驗將嵌入參數設定為一個固定值,由于不可見性還與圖像本身相關,比如,紋理越豐富的圖像,越容易隱藏水印[16],設置固定的嵌入參數,對于不同圖像,水印的不可見性會存在差異。還有一些水印算法[16-19]根據圖像特點或者人類視覺特性,建立一個調參模型,自適應地設置嵌入參數。它們通常利用圖像的均值、方差、熵等作為參考,使嵌入參數能夠隨圖像變化。SHEN等[17]根據嵌入區域中圖像塊的對比度值和不同標記的特征值的加權比來確定多個嵌入參數。陳夢瑩等[18]基于人眼視敏度特性分析,提出根據譜度量構造紋理掩蔽因子,并結合圖像亮度及邊緣掩蔽因子,構造彩色圖像自適應掩蔽因子。YADAV等[19]利用信息熵度量紋理豐富程度,提出根據紋理較豐富的圖像塊的標準差來調節強度因子的模型。黃櫻等[16]根據紋理掩蔽特性,提出一種紋理值的度量方法,并利用嵌入區域的局部紋理值及全局紋理值自適應地為不同區域設置不同的嵌入參數。現有的這類方法都是基于圖像或圖像塊自適應調整對應的嵌入參數,但圖像塊中每個像素的修改量仍然相同,因此,沒有充分利用圖像內容的特點。
為解決現有算法中存在的問題,文中利用滑動窗口來定位水印的嵌入區域,雖然相較特征點定位耗時,但可以減少定位偏差,同時避開邊緣位置,算法的整體效率通過設計高效的水印嵌入和提取方法來補足。首先,在定位嵌入區域時考慮邊緣特性,盡可能避開圖像邊緣,使得即使出現微小的定位偏差,也不影響水印提取的正確性;其次,在定位的嵌入區域中采用AVAS算法進行水印嵌入和提取,根據邊緣信息建立調參模型,自適應調整AVAS中的嵌入參數,在保證水印不可見性的前提下,增加包含邊緣圖像塊的水印嵌入強度,即便嵌入區域包含少量圖像邊緣,也能夠正確提取水印;最后,根據像素類型自適應地設置不同的像素修改量,提升水印的不可見性。
3 嵌入區域判定方法
局部水印技術選擇多個區域嵌入水印,相比于全局水印技術具有更高的魯棒性。根據第1節的分析,含邊緣較多的區域抵抗定位偏差的能力較弱,為減少定位偏差的影響,在定位嵌入區域時應盡量避開邊緣位置。基于此,本節利用滑動窗口遍歷圖像,以區域的邊緣特性為主要參考指標,以紋理、灰度及位置特性為輔助參考指標,對不同區域進行評分,選取出含邊緣較少且隱藏性較好的多個非重疊區域作為水印的嵌入區域。
3.1 區域的邊緣特征評分
定位偏差會導致區域中的內容發生變化。圖像邊緣附近像素灰度值差異明顯,若定位的區域中包含較多的圖像邊緣,當發生定位偏差時,區域中內容變化更為顯著,增加水印提取的難度。為盡可能選擇包含較少邊緣的嵌入區域,精準地檢測圖像邊緣至關重要,而直接利用Canny算子的傳統邊緣檢測方法對噪聲干擾十分敏感。為高效、精準地檢測邊緣,筆者首先對圖像進行預處理,再利用Canny算子進行邊緣檢測,最后對所得邊緣圖像進行后處理,以獲取精準的邊緣信息。
圖像中的噪聲通常為高頻信息,在DCT域中用交流系數(AC系數)來描述,降低非零AC系數的幅度可以減少噪聲信息的干擾。因此,筆者提出一種邊緣檢測預處理方法,在邊緣檢測之前對原始圖像進行DCT變換,在DCT域中從右下角開始按“Z”字形遍歷AC系數,得到系數序列,將排在序列前90%的AC系數中非零系數的值置為零,達到消除噪聲干擾的目的。再利用Canny算子檢測預處理后圖像中的邊緣,獲得精確度較高的二值邊緣圖像。
為進一步提高檢測精準度,考慮對邊緣圖像進行后處理,排除一些誤檢邊緣。在原圖像中計算邊緣像素與八鄰域內其它各像素的灰度差的均值,計算方式如下,
(1)
其中,D為像素c的八鄰域,p為像素的灰度值。根據預設的閾值τ刪除不滿足條件的誤檢邊緣,如果Adiff小于閾值,則判斷為誤檢邊緣,在對應邊緣圖像中將該像素的灰度值置為0;大于或等于閾值,則保留,最終得到精確邊緣圖像。經多次實驗后確定τ的取值為20。
(a) 原始圖像
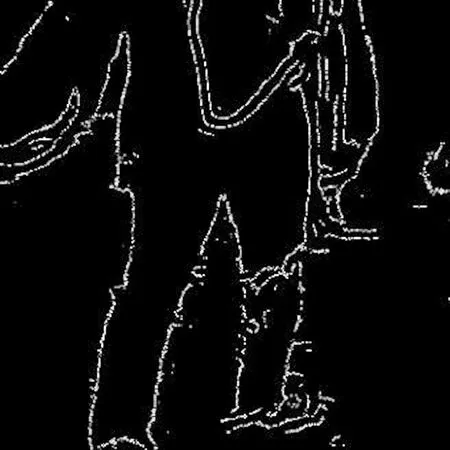
(b) 邊緣圖像
從圖2可以看出,經過原始圖像預處理及邊緣圖像后處理,基本消除噪聲干擾,實現邊緣精準檢測。
根據第1節的分析,為提高水印的魯棒性,應當將水印嵌入到含邊緣較少的區域中。由此可知,如果對區域進行評分,包含邊緣像素越少的區域應給予越高的分數。
定義1區域邊緣得分。度量區域中邊緣像素的數量,用于評估區域中邊緣的豐富程度。計算式如下:
(2)
其中,(u,v)是區域中心點的坐標,m、n分別為區域的寬度、高度,pi,j=255是邊緣圖像中灰度值為255的像素,即區域中的邊緣像素,num為邊緣像素的數量。
3.2 區域的其他特征評分
良好的不可見性和魯棒性是水印技術的重要屬性,考慮抵抗定位偏差以增強魯棒性的同時必須保證良好的不可見性。因此,選擇嵌入區域時不僅要考慮邊緣特性,還需要考慮紋理等其他特性。
3.2.1 區域紋理特征評分
根據人眼視覺掩蔽特性,嵌入在圖像紋理豐富區域的水印相比于紋理平滑區域的水印更不容易被人眼察覺[16]。為保證水印的不可見性,確定嵌入區域時應該選取紋理豐富的區域。信息熵表征圖像包含的信息量,常常被用來度量圖像的紋理豐富程度,紋理越豐富的區域,其信息熵值越大。因此,在區域評分特性中,信息熵值越大的區域相應評分應該越高。
定義2區域紋理得分。反映區域的紋理豐富程度,利用區域的信息熵值來衡量。計算式如下:
(3)
其中,kp是區域中灰度值為p的像素所占比例。
3.2.2 區域灰度特征評分
筆者通過修改像素灰度值嵌入水印,如果將水印嵌入在灰度值接近于0或者255的區域,容易造成灰度值越界,導致水印無法嵌入。因此,灰度等級越適中的區域越適合作為水印嵌入區域,應獲得較高的評分。
定義3區域灰度得分。通過度量區域中像素的灰度值,綜合評估區域的灰度等級。計算式如下:
(4)
其中,pi,j表示區域中第i行、第j列像素的灰度值。
3.2.3 區域位置特征評分
圖像傳播過程中,靠近邊沿的部分容易被修改或刪除。因此越靠近中心的區域越適合嵌入水印,應當得到越高的分數。
定義4區域位置得分。根據區域與圖像中心的距離,描述區域的位置特征。計算式如下:
(5)
其中,(U,V)是圖像中心點的坐標。
3.3 嵌入區域的確定
為確保圖像在受到縮放等攻擊后,獲取的水印嵌入區域仍與之前保持一致,文中利用與原始圖像尺寸成比例的滑動窗口以一定的移動步長遍歷原始圖像及相應的邊緣圖像,分析每個窗口中的邊緣得分、紋理得分、灰度值得分和位置得分,根據式(6)計算區域的特征綜合得分Scoreu,v,保存窗口所在的位置信息,作為侯選位置。計算式如下:
Scoreu,v=αEu,v+βHu,v+γGu,v+δPu,v,
(6)
其中,α、β、γ、δ分別為區域邊緣得分、紋理得分、灰度得分、位置得分的權重。相同不可見性前提下,邊緣處的水印魯棒性差。為盡可能避開邊緣位置,邊緣得分所占權重應當大一些。紋理、灰度都是圖像本身的特性,能夠更真實地描述區域的圖像信息,而位置雖然與圖像特性無關,但是其經受攻擊后的穩定性更強,因此在區域綜合評分中,為平衡不可見性與定位準確性,設置位置得分的相對權重與紋理和灰度的權重相同。由于每幅圖像不同得分所占比重保持一致才具有可比性,綜合以上分析,設置α= 0.4,β= 0.2,γ= 0.2,δ= 0.2。
運算結束后,將窗口向右或者向下滑動一個步長,直到處理完整個圖像。 其中,滑動窗口與原始圖像尺寸的比例記為a,滑動窗口的移動步長與窗口的大小成比例,該比例記為b。
將所有候選位置的特征綜合得分按從大到小的順序進行重新排列,并判斷區域是否重疊。 如果兩個區域發生重疊,嵌入的水印則會相互干擾,影響水印提取的準確性。所以,需要排除重疊區域中特征綜合得分較低的區域,選擇得分最高的d個非重疊區域作為水印嵌入區域。如果最終得到的區域數量小于d,則將所有保存的非重疊區域都作為水印嵌入區域。
4 雙重自適應水印嵌入方案
文中在定位的嵌入區域中采用AVAS算法進行水印嵌入。 首先將圖像分塊,然后根據式(7)修改每個圖像塊的像素值,嵌入1位水印信息。
(7)

AVAS算法中圖像塊的像素總修改量由嵌入參數σx,y決定,而嵌入參數為固定值,意味著不同圖像塊中水印的嵌入強度相同。 由于人眼對不同圖像內容的敏感程度有差異,相同的嵌入強度難以保證所有嵌入的水印都具有良好的不可見性。 為不影響圖像質量,只能選取較小的嵌入參數來減小水印嵌入強度,但水印抵抗攻擊的能力也隨之降低。 為解決這一缺陷,筆者提出一種雙重自適應水印嵌入方案,第一重粗粒度自適應方案根據圖像塊邊緣像素數量自適應地調節嵌入強度σx,y,增大邊緣塊的嵌入強度以增強其魯棒性;第二重細粒度自適應方案利用高斯窗自適應地調整邊緣附近像素的修改量以達到平滑過渡的效果,獲得更好的不可見性。
4.1 自適應嵌入參數
設置嵌入參數時,應充分考慮圖像自身的特征和人眼的視覺特性。 由于邊緣位置灰度值差異明顯,根據視覺掩蔽效應,人眼對邊緣灰度變化的敏感度較低,對于包含邊緣的圖像塊,適當增大水印嵌入強度不會影響圖像質量。 因此,文中利用這一特性設計一種自適應調參模型,根據圖像塊中的邊緣像素數量自適應地調整嵌入參數,在保證水印不可見性的前提下盡可能提高水印的魯棒性。
為建立嵌入參數和邊緣像素數量間的函數關系,文中隨機從數據集中選取20幅圖像用于嵌入水印。 在每幅圖像中定位兩個嵌入區域后,將區域分成等大的10×10個圖像塊,并通過AVAS算法在每個圖像塊中嵌入一位水印,不同區域及不同圖像中嵌入相同的水印,通過調整嵌入參數,使得所有圖像塊在嵌入水印前后的結構相似度(Structural SIMilarity,SSIM)保持一致。記錄每個圖像塊的嵌入參數(σ),并按照式(8)在原始圖像對應的邊緣圖像中統計各圖像塊的邊緣像素數量(N),得到4 000組數據用于建模分析。
(8)
其中,numpi,j=255是在圖像塊的邊緣圖像中統計的邊緣像素數量。
為驗證兩者之間的相互關系,將邊緣像素數量作為自變量,嵌入參數作為因變量,通過式(9)計算兩變量的相關系數r(N,σ)=0.994 2,根據運算結果可以斷定嵌入參數和邊緣像素數量間的線性相關程度很高。
(9)
為進一步確定兩變量間的定量關系,文中利用線性回歸的方法,通過最小二乘法逼近擬合數據,建立其函數關系,具體計算方式為
(10)
其中,s、t為常數。經過以上運算,嵌入參數與邊緣像素數量間的函數關系描述為
σ=0.224 3N+1.522 8 。
(11)
由此,得到一個根據圖像塊中邊緣像素數量自適應地調整水印嵌入參數的模型。這個調參模型是在嵌入水印前后圖像具有相同SSIM值的前提下推導的,可以保證不同區域中的水印具有一致且良好的不可見性。
利用上述模型調節嵌入參數時,仍需考慮一個問題,圖像遭受攻擊后難以保證邊緣像素數量保持不變。如果根據圖像塊中實際的邊緣像素數量設置嵌入參數,無法確保圖像被攻擊前后的嵌入參數保持一致,容易造成水印提取錯誤。

(12)

綜上,設置嵌入參數時,利用式(11)所示調參模型,根據圖像塊的固定邊緣像素數量確定嵌入參數。保證非邊緣塊的嵌入強度較小,水印不易被察覺,同時邊緣塊的嵌入強度較大,其魯棒性得以提升。
4.2 自適應像素修改量
圖像中不同像素與相鄰像素間的相關性程度存在差異,導致不同像素對水印的承受能力有所不同。邊緣像素附近的像素與相鄰像素相似度較低,對它們進行修改不易引起人眼注意,因此,離邊緣像素越近的像素可以承受越多的修改。相比之下,其他非邊緣像素處相鄰像素間相似度較高,導致在相同的視覺感知要求下,非邊緣像素可以做出的修改遠小于邊緣像素附近的像素。基于此,為保證嵌入水印后圖像的視覺質量,文中在得到圖像塊總修改量后,根據不同像素類型分配像素修改量,同時利用高斯窗自適應地調整邊緣附近像素的修改量,從而利用邊緣的掩蔽效應提升水印的不可見性。
4.2.1 計算圖像塊總修改量
在AVAS中,利用量化索引調制方法量化每個圖像塊的DC系數進行水印嵌入,量化嵌入的DC系數計算方式如下:
(13)
(14)
計算圖像塊中所有像素的像素總修改量g(σx,y,wx,y):
(15)
4.2.2 分配像素修改量
在空域中根據圖像塊劃分及像素類型自適應地設置圖像塊中各像素的修改量ωx,y(i,j)。如果圖像塊為非邊緣塊,則將像素總修改量平均分攤到每個像素上;如果圖像塊為邊緣塊,則根據不同像素的修改量權重參數θx,y(i,j)將像素總修改量自適應地分配給不同像素。計算式如下:
(16)
其中,θx,y(i,j)為圖像塊對應的邊緣圖像經過高斯窗后得到的坐標為(i,j)的像素的自適應修改量權重參數。高斯濾波公式如下:
(17)
其中,σ為標準差。最后根據式(18)修改像素灰度值,獲得嵌入水印后的圖像。
(18)
綜合以上討論,在嵌入水印時,可利用雙重自適應調參模型。首先,根據邊緣像素數量和嵌入參數間的函數關系,自適應地調節水印的嵌入參數,適當增大邊緣塊的嵌入強度;其次,根據邊緣塊中不同像素的修改量權重在空域中自適應地調整像素修改量,讓邊緣像素附近像素承擔較多的修改,既能提高邊緣塊中水印的魯棒性,又能保證邊緣塊每個位置的水印都具有良好的不可見性。
5 算法流程
結合嵌入區域的判定方法和雙重自適應水印嵌入方案,提出了一套融合區域邊緣特征的雙重自適應水印算法,本節將對其嵌入和提取過程進行詳細介紹。
5.1 水印嵌入算法
圖3展示了文中算法的嵌入流程。其詳細步驟如下:

圖3 水印嵌入算法
Step 1:邊緣檢測。按照2.1節所述邊緣特征提取方法獲得原始圖像的邊緣圖像。
Step 2:進行綜合評分,確定嵌入區域。首先利用滑窗遍歷原始圖像和邊緣圖像,根據式(2)計算區域邊緣得分,根據式(3)、式(4)、式(5)計算區域紋理、灰度和位置得分;然后根據式(6)計算區域綜合得分;最后將所有區域按照綜合得分從高到低排序,選出前d個非重疊區域作為水印的嵌入區域。
Step 3:水印編碼。將原始水印信息進行RS(Reed-Solomon)編碼,并加入41位標記信息,得到最終的長度為m的二進制水印序列。
Step 4:將嵌入區域分成m塊,在每個圖像塊中嵌入1位水印。根據每個圖像塊的邊緣像素數量,利用式(12)將圖像塊劃分為邊緣塊和非邊緣塊,并利用式(11)所示調參模型計算不同圖像塊的嵌入強度參數σx,y。
Step 5:根據圖像塊的嵌入強度參數σx,y和圖像塊中待嵌入的水印信息位wx,y,利用式(15)計算圖像塊的總修改量g(σx,y,wx,y),再根據等式(16)得到同一圖像塊中不同像素的修改量ωx,y(i,j)。
Step 6:利用式(18)在每個圖像塊中嵌入1位水印,得到含水印圖像。
5.2 水印提取算法
圖4展示了文中算法的提取流程。其詳細步驟如下:
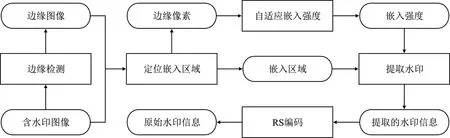
圖4 水印提取算法
Step 1:檢測圖像邊緣,定位嵌入區域。方法與嵌入算法中的Step 1和Step 2一致,得到d個嵌入區域。
Step 2:將嵌入區域分成m塊,計算不同圖像塊的嵌入強度參數σx,y。方法與嵌入算法中的Step 4一致。
Step 3:首先根據Step 2得到的嵌入強度參數σx,y計算量化步長,根據式(13)提取圖像塊的DC系數RDC′x,y,然后利用式(19)提取該圖像塊的水印信息位w′x,y。其中,floor()為向下取整函數。
(19)
Step 4:根據提取到的水印計算標記位的正確率,當標記位正確率超過80%時,用RS解碼器解碼其余水印信息位,得到原始水印信息。
6 實驗結果及分析
為驗證算法的實用性,本節將從不可見性、魯棒性和定位準確性三個方面對文中算法進行評估,并與其它同類算法進行比較,證明文中算法的優越性能。
6.1 實驗設置
文中采用的實驗數據集包含100幅不同尺寸的圖像,其中包含多種圖像類型且每種類型的圖像包含多種自然場景,能夠真實地體現文中算法的有效性。
文中將AVAS[12]算法、DQAQT算法[10]和SSR算法[7]作為對比算法。AVAS和DQAQT是全局自適應水印算法,用于對比不可見性和魯棒性。SSR是一個使用SIFT確定嵌入區域的局部自適應水印算法,主要對比水印提取的準確率和嵌入區域召回率。實驗中代表圖像作品版權的字符串為“abcd1234”,AVAS中把該字符串編碼為25×25的QR(Quick Response)碼,將其中的361位作為水印,在提取端利用Zbar解碼器對QR碼進行掃描識別;DQAQT中直接將字符串轉換成二進制序列作為水印,重復5遍,在提取端通過逐位統計的方式得到最終的字符串;文中算法將該字符串編碼作為糾錯容量為16的RS碼,并轉換為二進制。DQAQT算法和文中算法均加入了長度為41的標記信息(全為0/1),得到最終長度為361的二進制序列并將其作為水印。
確定嵌入區域的階段,滑動窗口與原始圖像尺寸的比例a設為1/4,移動步長與滑動窗口大小的比例b設為1/4,最終嵌入區域的數量d設為4,通過水印的重復嵌入增強抵抗攻擊的能力,且保證具有較大的水印嵌入容量。實現自適應嵌入參數時,取閾值Th的值為25。
6.2 實驗性能評估
6.2.1 不可見性評估
為得到符合人類主觀感知的客觀評價結果,文中采用評價指標SSIM評估算法的不可見性。SSIM通過計算兩幅圖像的相似度來衡量圖像質量。其定義如下:
(20)
利用文中算法和AVAS、DQAQT兩種對比算法分別在數據集中的100幅圖像中嵌入水印,AVAS中嵌入參數設置為3.5,DQAQT中設置PSNR(Peak Signal to Noise Ratio)值為42 dB,保證對比實驗基本一致的水印嵌入強度,計算得到每幅含水印圖像的SSIM值如圖5所示。
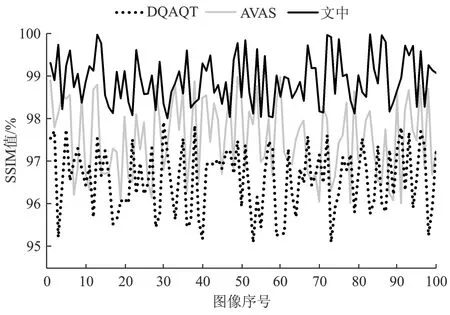
圖5 文中圖像的SSIM值
從實驗結果可以看出,文中算法的SSIM值高于對比算法,說明文中算法的不可見性優于其它兩種算法。這是因為AVAS中所有位置的水印嵌入強度相同,而非邊緣塊隱藏水印的能力遠不如邊緣塊,導致嵌入在非邊緣塊中的水印出現明顯的塊效應,拉低了整個圖像的SSIM值;DQAQT中將水印的嵌入強度均攤到每個像素上,由于邊緣像素和非邊緣像素對水印的承受能力不同,難以保證水印無法被感知。而文中選取嵌入區域時融合紋理特征,并在嵌入水印時對非邊緣塊中的水印設置較小的嵌入強度,對非邊緣像素做盡可能小的修改,最大限度地提高水印的不可見性,獲得更高的SSIM值。圖6(a)、圖6(b)分別為原始圖像和含水印圖像,由圖可知,兩者的視覺效果基本一致,表明文中算法具有較好的不可見性。

(a) 原始圖像

(b) 含水印圖像
6.2.2 魯棒性評估
水印的魯棒性一般用錯誤比特率(Bit Error Ratio,BER)來衡量。BER通過計算提取的水印中錯誤比特數的比例來客觀地表現水印的魯棒性。其范圍是0~1,值越小,意味著水印提取的準確率越高,代表魯棒性越高;反之亦然。其計算式如下:
(21)
其中,Nerr為提取的水印中錯誤的比特數,Nlen為水印的總比特數。
文中分別對SSR、AVAS、DQAQT以及文中算法嵌入水印后的圖像進行不同類型不同強度的攻擊,再提取水印計算BER值來評估水印的魯棒性。
(1) 信號處理攻擊
信號處理攻擊實驗結果如表1所示。文中算法對常見的信號處理攻擊均表現出良好的抵抗能力。其中,文中算法和AVAS抵抗疊加噪聲和JPEG壓縮的能力均明顯優于DQAQT和SSR。因為疊加噪聲和壓縮攻擊都是修改高頻系數,而文中算法和AVAS將水印嵌入在DC系數中,DC系數是低頻系數,因此水印基本不會受影響;對于均值濾波攻擊,文中算法與DQAQT的抵抗能力相當,由于濾波處理會改變像素灰度值,尤其對邊緣像素的改變更顯著,會對文中水印的魯棒性造成一定的影響。相比于AVAS和SSR,文中算法提取水印的BER均較低,這歸功于文中算法考慮了區域特征對水印魯棒性的影響,并將水印重復嵌入到多個穩定的局部區域中,嵌入過程中又根據邊緣像素數量自適應地調節水印嵌入參數,增大水印嵌入強度,增強其抵抗攻擊的能力。此外,文中在生成水印時借助RS碼編碼策略,利用RS碼的容錯性在一定程度上進一步提高了水印的魯棒性。
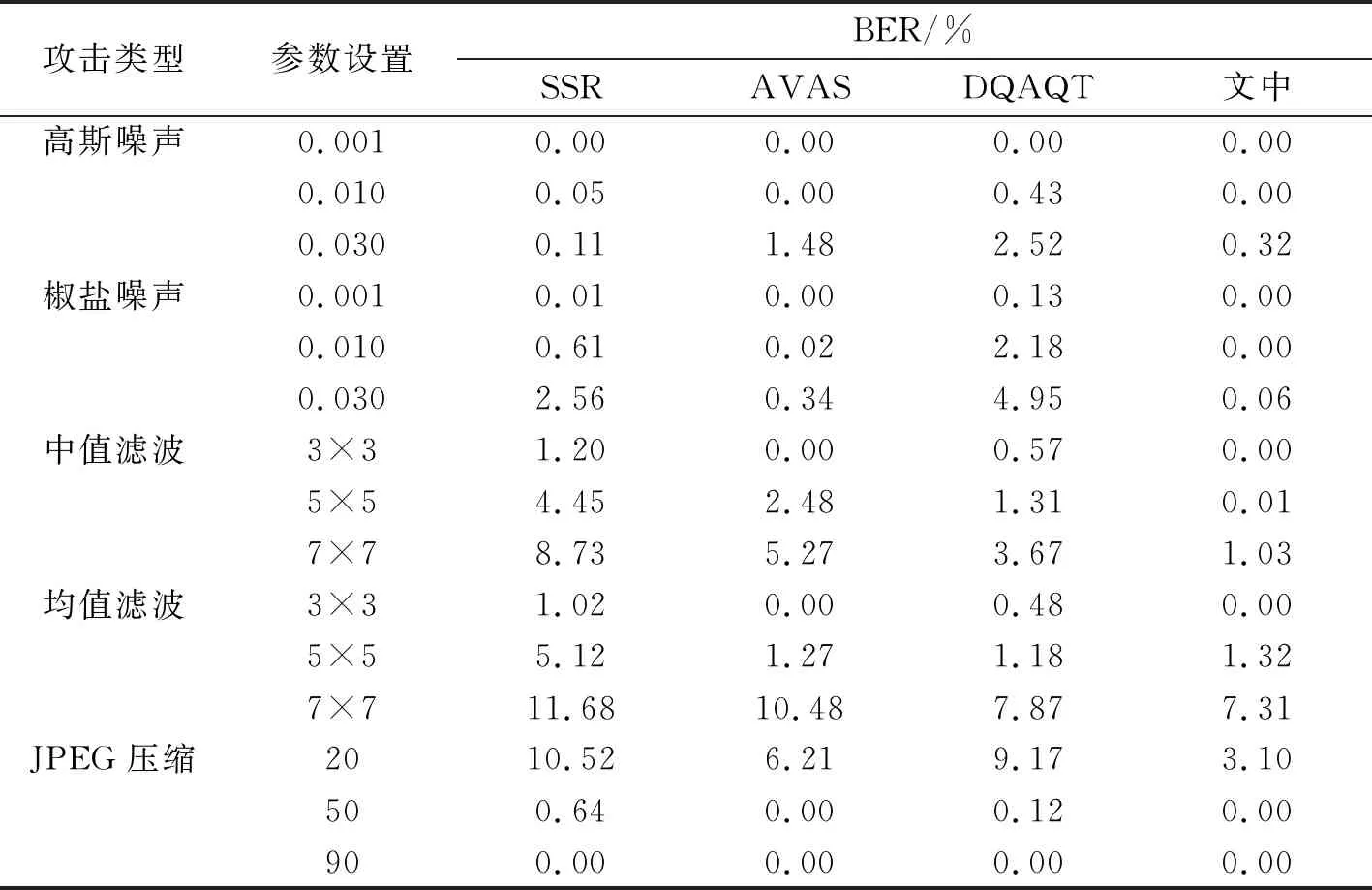
表1 信號處理攻擊后不同算法提取水印的BER值
(2) 幾何攻擊
幾何攻擊實驗結果如表2所示。DQAQT算法和AVAS算法難以抵抗剪切、遮擋類攻擊,原因在于它們將水印嵌入在完整的圖像中,部分圖像被修改或刪除都將造成水印的丟失,而文中算法將水印重復嵌入到多個局部區域中,即使某些區域被剪切或遮擋,仍存在某些不受影響的區域,從而可以從這些區域中提取出正確的水印。SSR算法難以抵抗圖像尺寸變化的攻擊,原因在于SSR的嵌入區域使用固定尺寸,當圖像尺寸發生變化時,原先的嵌入區域的尺寸發生變化,這必然導致水印提取失敗,而文中利用與圖像尺寸成比例的滑動窗口定位嵌入區域,可以保證圖像尺寸發生變化之后,定位的區域與之前保持一致,同時文中算法的量化步長與圖像尺寸成一定比例,進一步增強了抵抗圖像尺寸變化類攻擊的能力。綜上分析,文中算法抵抗各種幾何攻擊的能力均優于其他3種算法。

表2 幾何攻擊后不同算法提取水印的BER值
6.2.3 定位準確性評估
SSR算法利用SIFT確定多個固定尺寸的非重疊區域作為嵌入區域。文中利用與原始圖像尺寸成比例的滑窗,綜合區域特征定位多個非重疊嵌入區域。因為每個嵌入區域都嵌入相同的水印信息,所以需要保證至少能夠正確定位一個嵌入區域。因此,將召回率定義為可成功召回一個以上嵌入區域的圖像占所有圖像的比例,并使用召回率作為定位準確性的衡量指標,不同攻擊后定位準確性結果如表3所示。
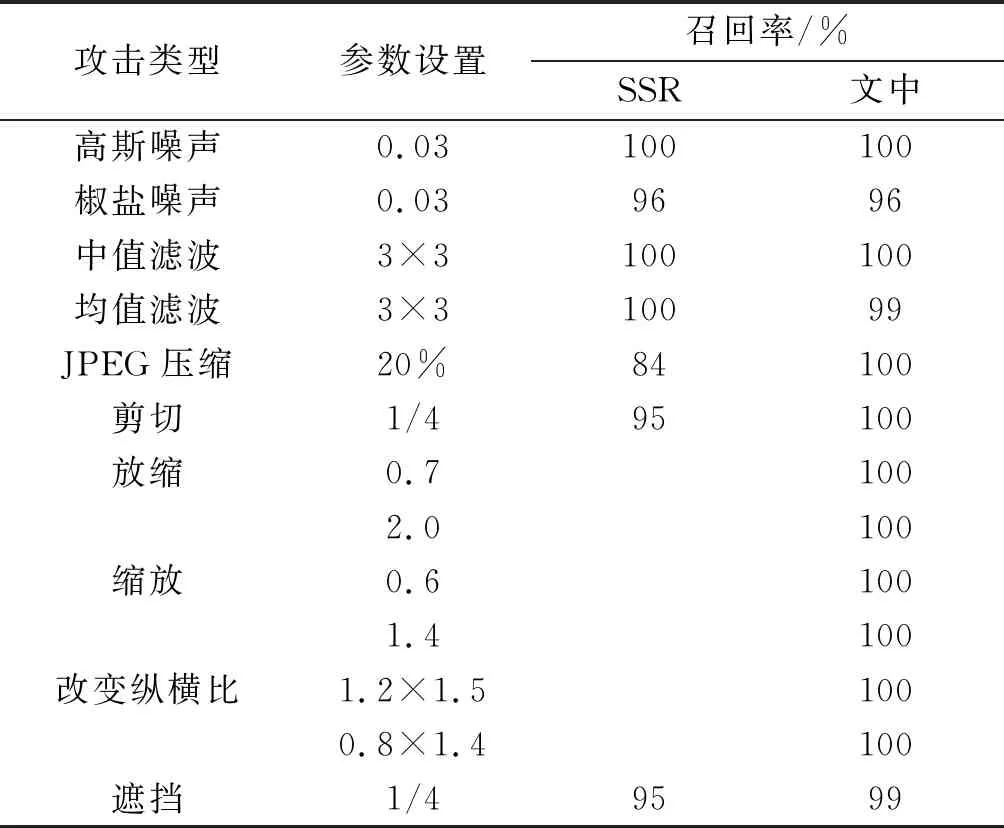
表3 攻擊后不同算法的召回率
實驗結果表明,SSR的嵌入區域定位方法難以抵抗圖像尺寸變化的幾何攻擊,而文中算法能夠很好地抵抗此類攻擊,在上節已說明原因。SSR算法抵抗信號處理攻擊的能力略遜于文中算法,這是因為SSR算法嵌入區域的定位與特征點的穩定性緊密相關,圖像被攻擊前后特征點可能發生變化,導致定位的嵌入區域不一致,降低定位準確性。文中采用的定位方法在抵抗椒鹽噪聲上稍有遜色,因為椒鹽噪聲會使總評分稍有波動,影響排序結果,導致嵌入時定位的區域,在提取時評分排在了選擇范圍之外。
7 結束語
筆者提出一種融合區域邊緣特征的雙重自適應圖像水印算法。算法利用滑窗對嵌入區域進行判定,綜合考慮邊緣、紋理、灰度、位置等特性,選擇出含邊緣較少且隱藏性好的多個非重疊局部區域作為水印的嵌入區域。嵌入時,采用雙重自適應嵌入方案:第一重粗粒度自適應方案,根據圖像塊邊緣像素數量自適應地調整水印嵌入強度,增強邊緣塊的魯棒性;第二重細粒度自適應方案,利用高斯窗自適應地調整邊緣塊中不同像素的修改量,在增強水印魯棒性的同時提高嵌入水印的不可見性。實驗證明,筆者提出的算法能夠抵抗多種類型的信號處理攻擊和幾何攻擊,相比于已有自適應圖像水印算法有更好的不可見性及更強的魯棒性。算法的不足之處是難以抵抗改變圖像亮度的攻擊,原因在于該算法基于量化DC系數嵌入水印,相當于在空域中直接修改像素灰度值來嵌入水印,改變圖像的亮度會導致灰度值的大幅改動,引起DC系數大幅改變,從而造成嵌入在圖像中的水印被破壞而無法提取。在未來的研究工作中將針對這一問題對水印算法作進一步的優化。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
