考慮等效電磁損耗電阻偏移的永磁同步電機直流信號注入在線參數辨識方法
2023-11-22 07:54:18馬銥林
電工技術學報 2023年22期
關鍵詞:信號
馬銥林 袁 浩 尹 威 楊 歡
考慮等效電磁損耗電阻偏移的永磁同步電機直流信號注入在線參數辨識方法
馬銥林1,2袁 浩1,2尹 威1,2楊 歡1,2
(1. 浙江大學電氣工程學院 杭州 310027 2. 浙江省電機系統智能控制與變流技術重點實驗室 杭州 310027)
在實際運行過程中,永磁同步電機的電氣參數將受到溫度、磁飽和等諸多物理因素的影響而發生偏移,進而影響到效率最優控制、電流解耦控制等優化算法的運行效果。因此,為實現高性能電機控制,永磁同步電機的多電氣參數在線辨識顯得尤為重要。然而,現有參數辨識方法并未考慮鐵磁損耗的影響,更未關注鐵磁損耗隨電流的偏移情況,所以在辨識精度上仍存在提升空間。對此,該文綜合考慮鐵磁損耗、銅損,將其集總為電磁損耗,并基于串聯電磁損耗電阻模型,提出一種考慮等效電磁損耗電阻偏移的永磁同步電機直流信號注入在線參數辨識方法。該方法首先提出等效電磁損耗電阻隨電流偏移的電機模型;其次由此設計同時考慮磁飽和、等效電磁損耗電阻偏移的直流信號注入在線參數辨識方法;由于待求解方程組較多,采用最小方均算法進行參數求解;最后通過實驗測試所提方法的準確性,測試結果表明,與正弦信號注入法、傳統直流信號注入法相比,所提方法的參數精度有所提升。
永磁同步電機 電磁損耗 參數辨識 直流信號注入
0 引言
永磁同步電機(Permanent Magnet Synchronous Machine, PMSM)因具有高功率密度、高運行效率等諸多特點,而被廣泛應用于電動汽車、家用電器、工業制造等領域[1-2]。在實際運行中,永磁同步電機的電氣參數,包括永磁體磁鏈、定子電阻、鐵損電阻、交直軸電感等,由于受到溫度、磁路分布與磁飽和等因素影響,會發生偏移[3-4]。電氣參數偏移會嚴重影響電機的控制性能,例如:基于損耗模型的最大效率控制,其優化性能依賴定子電阻、鐵損電阻的精度[5];轉矩觀測器的估測性能與永磁體磁鏈、交直軸電感的準確性密切相關[6];交直軸電流解耦控制也需要精確的電機參數進行配合[7]。因此,多電氣參數在線辨識是實現電機高性能控制的關鍵。
要實現永磁同步電機多電氣參數在線辨識,最核心需要解決的是電機特征方程組的欠秩問題,即特征方程數量小于待辨識電氣參數,電氣參數不能被唯一、準確地確定[8]。目前,解決欠秩問題的技術路線包括:①減少辨識參數數量[9-12];②增加特征方程數量[13-21]。
其中,減少辨識參數數量的方法可細分為:將部分參數視為固定值[9-11];分步辨識,即將參數根據變化時間常數分為溫度敏感、電氣敏感兩組,每次僅辨識其中一組參數[12]。然而上述兩類方法,前者仍存在部分參數無法在線辨識;后者也面臨嚴苛的初值問題,若初值出錯將產生極大誤差。
增加特征方程數量的方法包括:考慮電流紋波影響,建立動態電流方程[13-15];通過信號注入增加特征方程[16-21]。根據信號類型,信號注入法可分為高頻正弦信號注入法[16-18]、直流信號注入法[19-21]。其中,電流紋波法并未考慮磁飽和的影響,并且在實際應用中需借助高采樣率硬件電路測量電流變化率,應用門檻較高;考慮到電機損耗的頻變特性,高頻正弦信號注入法求解的高頻電阻與目標求解的基頻電阻間存在差異[22],因而無法精確辨識電阻參數。對于傳統的直流信號注入法,其通過構建兩組不同穩態電流的電機特征方程從而形成滿秩矩陣[19-21]。該方法可以計算基頻電阻,也考慮了磁飽和影響[19],并且無需額外的硬件電路支持,便于應用。但是,現有的直流信號注入法均未考慮電機的鐵磁損耗。而實際上,鐵磁損耗同樣是電機損耗中不可忽視的組成部分,在諸多工況下甚至會超過銅損[23],進而影響電阻、交直軸磁鏈等與損耗及機械功率相關的參數的辨識精度。所以,為進一步提升直流信號注入法的辨識性能,需對基礎理論模型進行修正,并優化相應的參數辨識方法。
現有考慮鐵磁損耗的電機模型分為兩類:①并聯鐵損電阻模型[23-25],提出采用鐵損電阻與勵磁回路相并聯的拓撲結構,以表征鐵損的頻變特性;②串聯電磁電阻模型[26-28],提出采用等效電磁損耗電阻與勵磁回路相串聯的拓撲結構,該等效電阻用以表征鐵磁損耗與銅損的集總電磁損耗。上述兩類模型中,并聯鐵損電阻模型,因具有較強的物理基礎被廣泛應用[23-25]。但是,該模型的計算式較為復雜,會對在線參數辨識引入巨大的運算壓力[26]。而與之相反,串聯電磁電阻模型的拓撲結構簡單,計算復雜度低、運算壓力小[26-28],并且,文獻[26]也已分析串聯電磁電阻模型與并聯鐵損電阻模型在數學上是等效的。除此之外,串聯電磁電阻模型與傳統僅考慮銅損的電機模型存在拓撲同一性,相應的理論與控制方法也因此具有較好的通用基礎。綜上所述,基于串聯電磁電阻模型開發相應的在線參數辨識方法,可以降低在線運算負擔,并與現有的優化控制算法,如最大效率控制、電流解耦控制等進行適配,具有較大的應用價值。
然而,現有串聯電磁電阻模型倘若應用到直流信號注入法中,無法處理不同穩態電流下電磁損耗,亦即等效電磁損耗電阻存在差異的情況。對此,本文基于改進的串聯電磁電阻模型,提出考慮等效電磁損耗電阻偏移的永磁同步電機直流信號注入在線參數辨識方法。首先,針對電機電磁損耗與電流的耦合關系,提出等效電磁損耗電阻隨電流偏移的串聯電磁電阻模型;其次,再基于修正后的模型,提出綜合考慮了磁飽和、等效電磁損耗電阻偏移的直流信號注入在線參數辨識方法;由于待求解參數與方程組數較多,為便于計算,采用基于梯度下降的最小方均算法用于參數求解;最后,通過實驗驗證和比較了所提方法的可行性與準確性。
1 改進串聯電磁電阻模型
電機模型是在線參數辨識的關鍵理論基礎,因此,為進一步提高參數辨識性能,本文綜合考慮磁飽和、電磁損耗偏移,提出改進串聯電磁電阻模型。
1.1 考慮磁飽和的串聯電磁電阻模型
磁飽和是鐵磁材料的重要特征,它表示在不同強度定子電流激勵下磁導率的變化情況,而電機的增量電感也因此隨電流矢量的偏移而發生變化[29]。對此,為表征磁飽和的具體影響,通常將電機電感分為視在電感a和增量電感i,如圖1所示[30]。
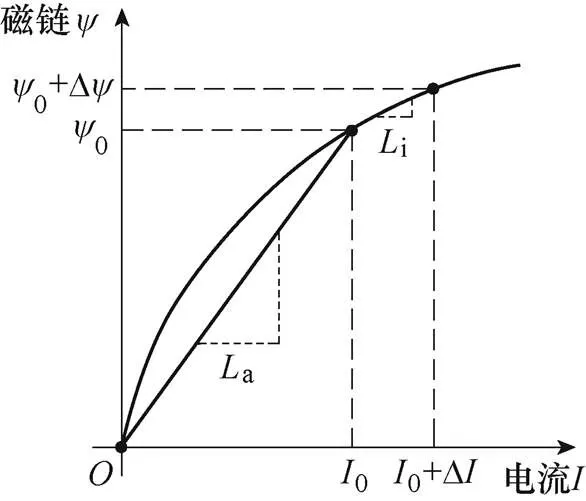
圖1 視在電感和增量電感示意圖
如圖1所示,對于任意電流工作點0,其視在電感a與增量電感i分別定義為

式中,D與Dy分別為增量電流與增量磁鏈;0為電流工作點0下的視在磁鏈。
因此,基于文獻[26]討論的串聯永磁同步電機模型,可以推出考慮磁飽和的串聯電磁電阻模型,對應的電壓電流方程為
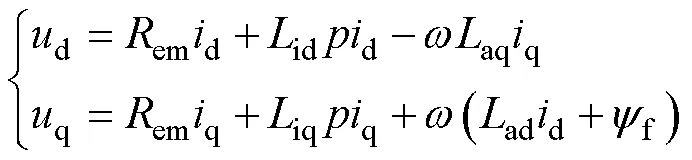
式中,q、d為交直軸電機端電壓;q、d為交直軸電流;iq、id為交直軸增量電感;aq、ad為交直軸視在電感;為微分算子;f為永磁體磁鏈;為電機角速度;em為等效電磁損耗電阻,表征鐵損與銅損的總損耗。
基于磁路建模理論[31]:永磁體為磁勢源,持續提供磁動勢f;而永磁體實際產生的磁鏈大小f,則由磁動勢f與電機的等效磁路磁導f共同決定,滿足方程f=ff。換而言之,在不同的電流矢量下,永磁體磁鏈也會因磁飽和而發生偏移。該偏移效果將與直軸視在電感發生耦合,進而增大參數辨識難度。又考慮到,對于傳統的優化控制算法,包括最大效率控制、轉矩觀測器、電流解耦控制等[5-7],僅需要交直軸視在磁鏈、增量電感進行配合,無需細分永磁體磁鏈f與直軸視在電感ad。因此,為便于參數辨識設計,本文采用由視在磁鏈表示的考慮磁飽和的串聯電磁電阻模型,有

由式(3)可以推導考慮磁飽和的串聯電磁電阻模型,如圖2所示。

圖2 考慮磁飽和的串聯電磁電阻模型
1.2 電磁損耗偏移與改進串聯電磁電阻模型
永磁同步電機的電磁損耗可分為銅損、鐵磁損耗兩部分。其中,當電流矢量發生變化時,電機繞組內電流分布將因鄰近效應發生偏移,進而影響定子電阻以及相應銅損大小[32]。對于鐵磁損耗而言,其大小與電機內磁場分布密切相關,而磁場分布也同樣會受到電流影響[23]。所以,電磁損耗及其等效電阻將隨電流而發生偏移。對此,本文將針對一臺永磁同步電機樣機進行測試,提取在不同電流矢量下的等效電磁損耗電阻em,具體樣機參數見表1。
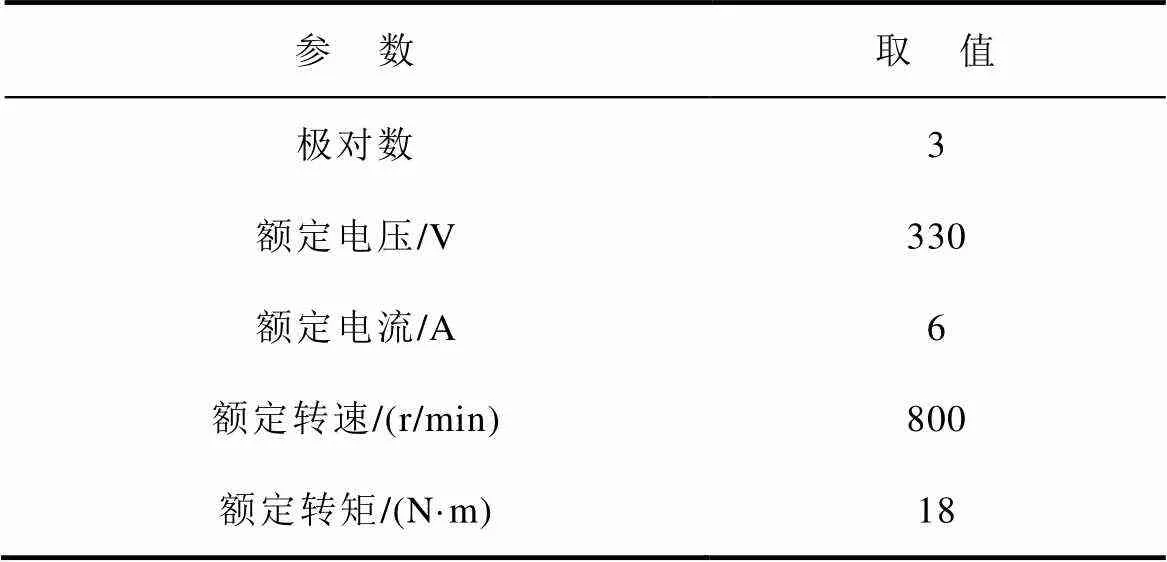
表1 被測永磁同步電機參數
基于式(3)的穩態形式,即忽略電流微分項,可推導得到等效電磁損耗電阻em的實驗計算公式為
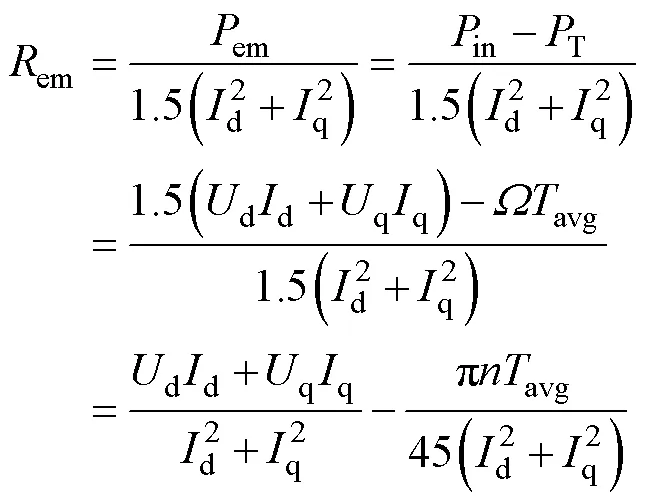
式中,em為穩態電磁損耗功率,滿足em=in-T;in為電機穩態輸入功率,滿足in=1.5(dd+qq);T為電機穩態輸出功率,滿足T=avg;為機械角速度,滿足=2p/60;為電機轉速;q、d為交直軸端電壓的穩態值;q、d為交直軸電流的穩態值;avg為轉矩傳感器所測量的穩態轉矩平均值。
基于式(4),測量永磁同步電機樣機在200 r/min和800 r/min下、全電流平面內的等效電磁損耗電阻em,結果如圖3所示。可得,待測電機的等效電磁損耗電阻em隨轉速升高而增大,并且在恒定轉速、不同電流下,待測電機的em也會發生較大變化,最大em可達最小em的1.45倍。
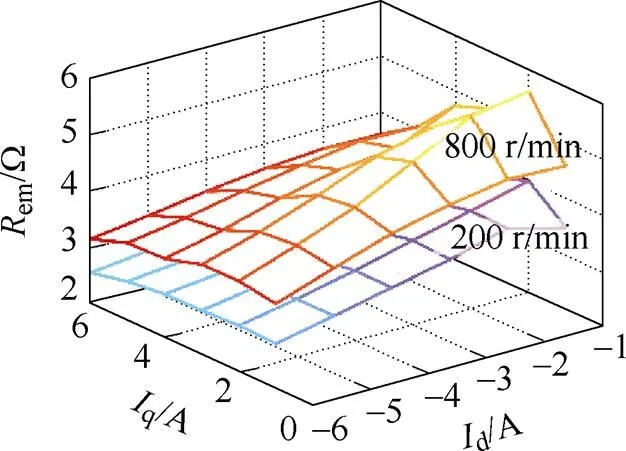
圖3 不同轉速、電流下的等效電磁損耗電阻Rem
然而,傳統直流信號注入參數辨識方法[21]僅將電磁損耗電阻視為定常參數,忽略損耗電阻的偏移情況,所以在電機損耗建模及其等效電阻辨識上存在缺陷。對此,本文提出采用電阻變化率,對串聯電磁電阻模型進行改進。改進后的穩態電壓方程為

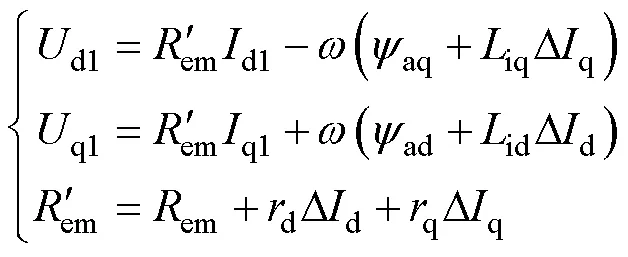

由式(5)、式(6)可知,本文提出的考慮磁飽和、電磁損耗偏移的改進串聯電磁電阻模型總計有7個電氣參數,分別為交直軸視在磁鏈(aq、ad)、交直軸增量電感(iq、id)、交直軸電磁電阻變化率(q、d)、等效電磁損耗電阻em。而傳統直流信號注入在線辨識方法采用兩步穩態電流注入的方式,僅有4個穩態電壓方程,仍小于待辨識參數數量,因而本文還需要設計相應的在線參數辨識方法實現上述參數的完全辨識。
2 直流信號注入在線參數辨識方法
為實現上述模型參數的全辨識,需要構建至少7個特征方程,即至少4組線性無關的電流工作點。因此,本文首先將針對注入的直流信號的穩態電流時序進行設計。
2.1 直流信號注入的穩態電流時序設計
為使電磁電阻的增量近似線性,各電流工作點離目標工作點的電流增量不宜過大。因此,本文提出采用交直軸電流交替變化的原則構建電流工作點,如圖4所示。該選取規則規定:所注入的電流信號每次僅變化一個軸的電流,從而盡量減小各工作點與目標工作點之間的最大電流偏差。其中,交軸電流q變化兩次,且每次的變化增量均為Dq;直軸電流d變化一次,增量為Dd。
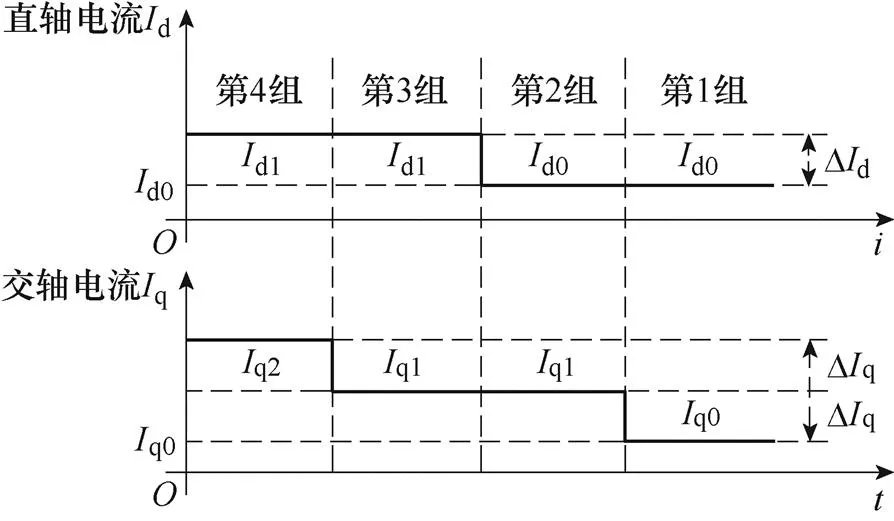
圖4 電流工作點示意圖
對于圖4中所展示的4組電流工作點,以電流工作點[d0,q0]為基準,定義第組的交直軸電壓為[d,q]、交直軸電流為[d,q]、交直軸電流增量為[Dd,Dq]。進而,可以由式(6)得到對應的電壓參數矩陣為

式中,為電壓矩陣,=[dq]T;為電機參數矩陣,=[emdqidiqadaq]T;d為直軸系數矩陣,d=[ddDddDq0-Dq0-]T;q為交軸系數矩陣,q=[qqDdqDqDd00]T。
選擇第1組的直軸電壓方程、第2~4組的交直軸電壓方程,可以得到總系數矩陣為

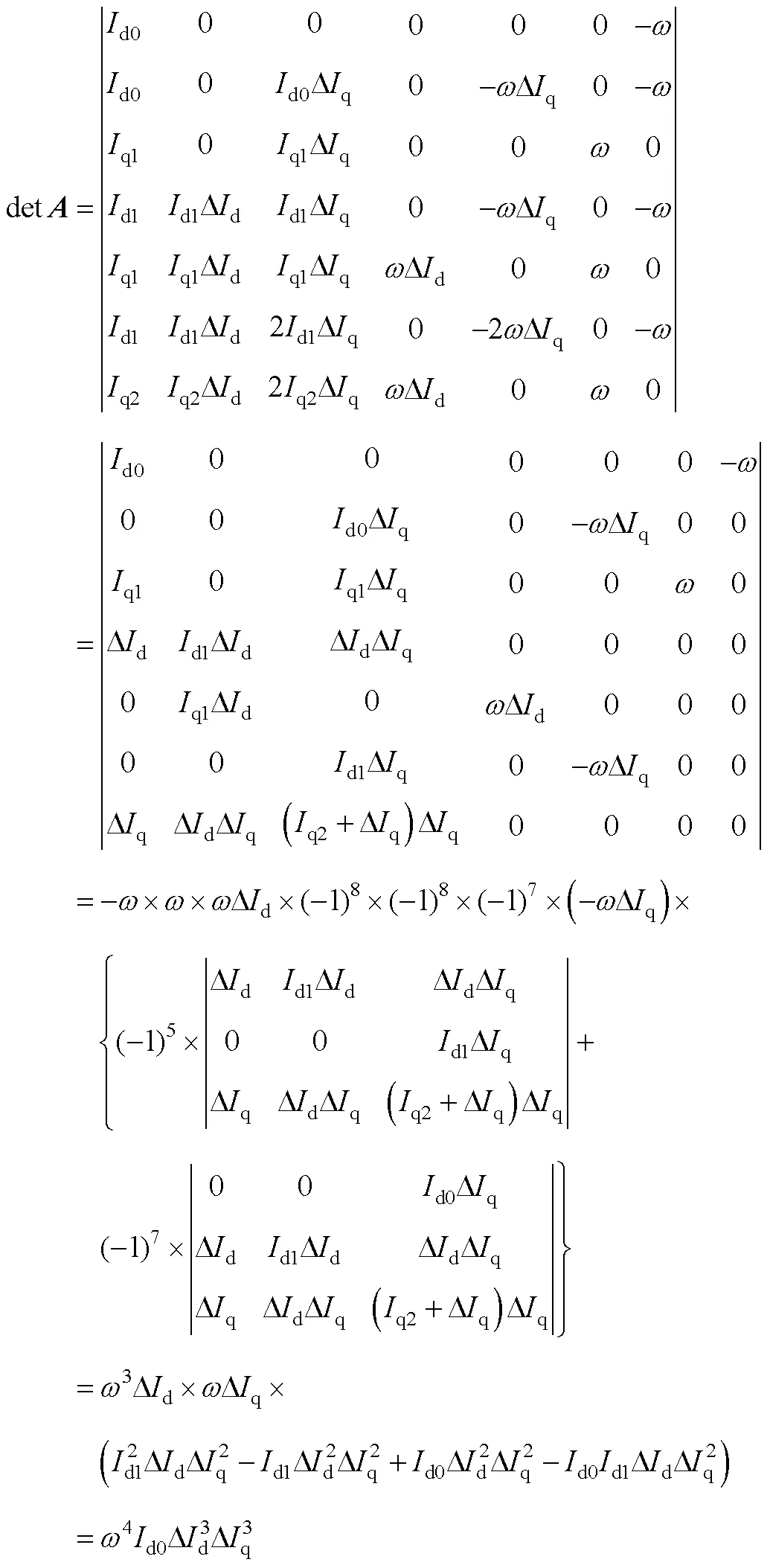
為實現總系數矩陣滿秩,則該矩陣的行列式應當滿足不為0[33],如式(9)所示。其相應推導過程在附錄中列出。

對于常用的內嵌式永磁同步電機而言,為利用磁阻轉矩增大轉矩密度,直軸電流d0通常為負。因而由式(9)可知,對于所提直流信號注入參數辨識方法,只需保證每次變化的電流增量Ddq不為0,且轉速非0,所構建的總系數矩陣即滿秩,可以實現對目標模型參數的全辨識。
2.2 基于梯度下降的最小方均算法
由于本文所提方法的總系數矩陣為7階矩陣,若進行解析逆運算將面臨繁瑣的公式推導與巨大的運算壓力。因此,本文采用基于梯度下降的最小方均算法,用于求解電機參數。
首先,基于最小方均算法,定義各電壓誤差的方均和為代價函數L,有

基于式(7)、式(10),可計算代價函數對各電機參數的梯度為


綜合式(11)中各參數的梯度,構建梯度矩陣=[emgdgqgidgiqgadgaqg]T。進而,為使得代價函數隨每次參數迭代而下降,則基于梯度矩陣可得所估測參數矩陣的迭代公式為

由此,代價函數,亦即各估測電壓的誤差方均和,將隨迭代而逐步降低,最終得到滿足預設估測電壓精度的全電機系數矩陣。本文在實驗中所預期的電壓精度具體為:代價函數小于1×10-4,即估測電壓誤差二次方的平均值小于25×10-6,折合平均電壓誤差約小于0.005。
3 實驗驗證
本文針對所提出的直流信號注入在線參數辨識方法,通過實驗的方式驗證其辨識精度。所搭建的實驗平臺如圖5所示。待測永磁同步電機的參數見表1;陪測電機用于拖動待測電機到恒定的轉速;轉矩傳感器用于測量待測電機的輸出轉矩;示波器用于記錄待測電機的電流信號、轉矩傳感器輸出的轉矩信號。
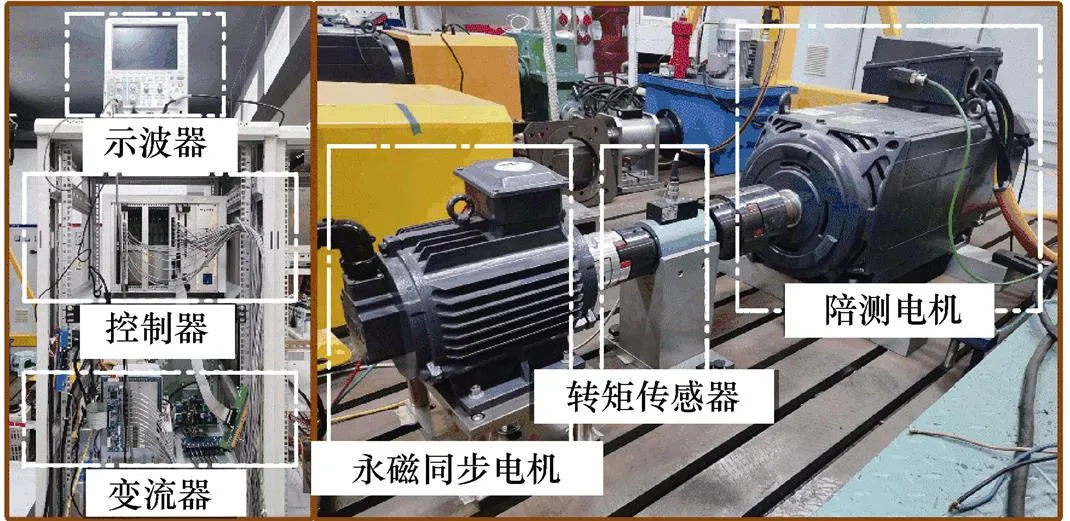
圖5 電機實驗平臺示意圖
3.1 與傳統方法精度比較
本文分別對所提參數辨識方法、正弦信號注入法[16]、忽略電阻偏移的傳統直流信號注入法[21]進行測試,對比其精度。考慮到各方法所辨識的參數存在差異,所以,本文僅對比通用的基頻視在參數,包括電磁損耗電阻em、交直軸視在磁鏈aqd,分別對應電機的損耗特性與輸出轉矩特性。


所采用傳統直流信號注入法,通過構建兩組穩態電流[d1,q1]、[d0,q0],滿足d1-d0=Dd=0.1 A、q1=q0,可以獲取對應穩態電壓差值Dd=d1-d0;之后,再將Dd除以Dd,可以得到損耗電阻dc;最后,視在磁鏈aqd也同樣可由式(13)計算得到。
對于所提改進的直流信號注入法,若所注入的信號幅值過大,將產生較大的轉矩與效率波動;若所注入信號幅值過小,將增大信號處理難度、降低辨識精度。因而,本文經不斷調整嘗試,最終選擇了引起波動較小、辨識精度較好的注入信號幅值,即Dd和Dq分別為0.1 A和0.05 A。之后,再基于第2節所述的電流工作點時序和最小方均算法迭代計算得到相應的電機參數。
上述三種方法精度對比結果如圖6所示。本文選擇200 r/min、800 r/min進行測試,分別對應待測電機的低轉速、額定轉速;在各轉速下選擇兩組電流矢量,分別為:-d0=q0=1、-d0=q0=6,對應待測電機的小轉矩、大轉矩工況。
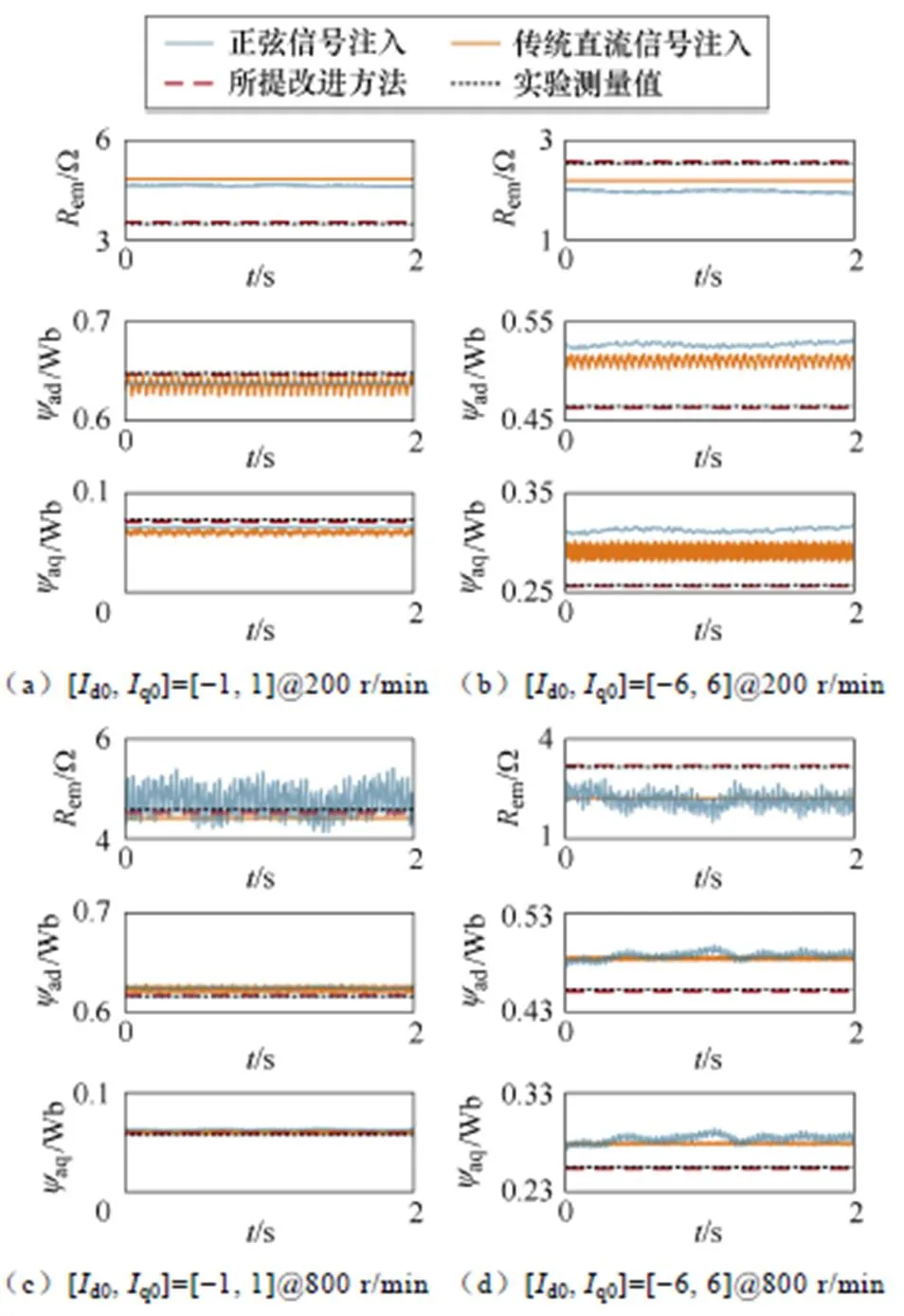
圖6 精度對比結果
基于測試結果,不同運行工況下的模型參數的實測值及不同方法的辨識結果平均值見表2。其中,方法r與方法1~3依次為:實測值、正弦信號注入法、傳統直流信號注入法、所提辨識方法。

表2 電機參數實測值及不同方法的辨識結果平均值
如表2所示,與其他方法相比,所提改進方法在所測試的工況下,對電機外特性相關參數均具有更高辨識精度。其對各參數的相對誤差均小于4%。
3.2 改進方法精度測試
分別選擇200 r/min、800 r/min,對應電機的1/4額定轉速、額定轉速,對全電流平面下,所提改進方法的參數辨識精度進行詳細測試,電流變化步長為1 A。各參數測試結果及其絕對誤差(Absolute Error, AE)見附錄中的附圖1。基于測試結果,可得各參數的平均絕對誤差以及平均相對誤差(Average Relative Error, ARE),見表3。

表3 電機參數的平均絕對誤差與平均相對誤差
根據表3中的結果可知:所提方法對轉矩、視在磁鏈、等效電磁損耗電阻的辨識均具有較高的精度,平均相對誤差均小于2.3%;此外,所提方法對增量電感的辨識精度雖然有所降低,但是平均相對誤差仍小于3.5%;然而,所提方法對電阻變化率的平均相對誤差較高,大于20%。該差異較大原因:一方面是因為電阻變化率的基值較小(大部分都小于0.2),因而較小的絕對誤差也會引起較大的相對誤差;另一方面是因為所提方法在電阻變化率估測方面確實存在性能不足,有待進一步提高。
3.3 參數迭代動態過程測試

本文同樣選擇200、800 r/min作為轉速工況,并且在各轉速下選擇一組電流階躍工況進行測試。針對被測電機,選擇盡量大的電流階躍,具體為:在200 r/min下,選擇[d0,q0]由[-1 A, 6 A]變為 [-1 A, 1 A];在800 r/min下,選擇[d0,q0]由[-6 A, 1 A]變為[-6 A, 6 A]。并且,針對各穩態電流工作點,選擇持續周期為2 s,其中,0.5 s用于等待電壓穩定、1.5 s用于采樣電壓滑動平均值。參數迭代的動態過程測試結果如圖7所示。圖中,qRef-q0、dRef-d0為交直軸電流指令值減去目標穩態電流,即表征電流工作點時序;qFbk-q0、dFbk-d0為交直軸電流反饋值減去相應目標穩態電流;abc為三相電流反饋值;L為式(10)計算的損失函數;Exp為任意電機參數的測試值;下標Est表征估測值。
由圖7可知,為得到滿足預設估測電壓精度的損失函數與模型系數,即損失函數小于1×10-4、折合平均電壓誤差約小于0.005,所提方法在200 r/min下需要迭代近80千次(每秒迭代10千次)、在800 r/min下需要迭代近10千次。此時,由于800 r/min的轉速與內電動勢(電壓)更高,所計算的單步梯度更大,因而具有更快的收斂性。
3.4 轉矩與效率波動測試
隨著所提直流電流信號的注入,電機的轉矩與電磁損耗均會受到影響,進而造成轉矩與效率波動的不利影響。對此,本文經不斷嘗試,最終選擇了波動較小的信號幅值:Dd=0.1 A、Dq=0.05 A。最后,本文也選取了不同的運行工況,以測試采用所選取幅值的直流信號注入下,轉矩與效率的波動情況,結果分別如圖8、圖9所示。此時,同樣選擇200 r/min和800 r/min進行測試。由于本文所采用電流增量Dd、Dq固定,因此轉矩波動將隨交直軸視在磁鏈(aq、ad)增大而增大。對此,本文選擇具有盡可能大視在磁鏈的電流工作點,即[d0,q0]分別為[-1 A, 6 A]、[-6 A, 6 A],進行測試。

圖8 轉矩波動測試結果

圖9 效率波動測試結果
根據圖8、圖9的測試結果可知,所提方法的四步穩態電流工作點之間的轉矩波動小于0.4 N·m、效率波動小于2%,波動相對較小。若想進一步減小轉矩與效率波動,則需要降低注入信號幅值。然而,隨著信號幅值的降低,數據處理難度與測試誤差的影響將逐步上升,進而也會影響辨識精度。因此,所提方法尚存在辨識精度與轉矩效率波動兩者之間的矛盾。
4 結論
現有永磁同步電機在線參數辨識方法并未考慮鐵磁損耗及其隨電流的偏移情況。而事實上,鐵磁損耗是電機損耗的重要組成部分,在諸多工況下甚至超過銅損,并且,鐵磁損耗隨電流的偏移量可超過最小值的40%[23]。對此,本文將鐵磁損耗、銅損集總為電磁損耗,提出了一種考慮等效電磁損耗電阻偏移的直流信號注入在線參數辨識方法。
首先,提出了一種考慮磁飽和現象與電磁損耗偏移現象的改進串聯電磁電阻模型,采用視在磁鏈、增量電感表征磁飽和現象;并采用電阻變化率表征電磁損耗偏移現象。其次,針對所提模型中的7個待辨識參數,采用交直軸電流交替變化的原則設計了線性無關的4組電流工作點時序,從而構建出滿秩的模型參數辨識矩陣。最終,采用基于梯度下降的最小方均算法,根據電壓估測誤差方均和L對各電機參數的梯度迭代求解辨識矩陣,最終得到滿足預設估測電壓精度的模型系數。
本文通過對永磁同步電機樣機進行測試,證明該方法的有效性。所提方法與傳統正弦信號注入法、傳統直流信號注入法相比,對視在磁鏈、等效電磁損耗電阻等與電機外特性相關的參數,均具有更高的辨識精度,平均相對誤差小于2.3%。此外,所提方法對轉矩、增量電感也具有較高的辨識精度,平均相對誤差分別小于0.9%和3.5%。然而,所提方法對電阻變化率的估測精度尚不理想,有待進一步提高。
本文所提在線參數辨識方法可應用于效率優化在線搜索控制、轉矩估測器、電機故障狀態檢測等應用領域。例如,倘若需要將所提方法與在線搜索控制進行適配,則應當推導滿足轉矩恒定、有功功率迭代降低、參數辨識矩陣滿秩等特征的可變dq電流增量計算式,其中,轉矩恒定應依靠所提方法的參數辨識結果計算實現;并且綜合設計注入信號(幅值與周期)、參數辨識迭代步長、電流增量計算時序等內容,在確保參數辨識可以在電流增量計算之前完成迭代的同時,盡可能減小轉矩與效率波動,并加快參數迭代與在線搜索的速度。
附 錄
1. 式(9)推導過程
式(9)的詳細推導過程如下:結合所設計的直流信號時序規則,將其代入到總系數矩陣中,可得其行列式det為
2. 不同轉速、電流下的參數辨識精度示意圖
各電機參數在不同轉速、電流下的辨識結果與辨識精度如附圖1所示。對于任意電機參數,紅點為所提方法觀測值Est;三維平面為實驗測試值Exp;絕對誤差AE=abs(Est-Exp)。其中,轉矩rq的測試值由轉矩傳感器測量得到;em由式(4)計算得到;d由兩個穩態電流對應的等效電阻差Dem=em1-em2除以直軸電流差Dd=d1-d2計算得到,并且兩穩態電流的交軸電流恒定,即q1=q2;q的測量方式與d相似,由等效電阻差Dem除以交軸電流差Dq得到;交直軸視在磁鏈aq、ad則基于em由式(13)計算得到;id的測量方式與d相同,由直軸視在磁鏈差Dad=ad1-yad2除以直軸電流差Dd計算得到;iq由交軸視在磁鏈差Daq=aq1-yaq2除以交軸電流差Dq計算得到。
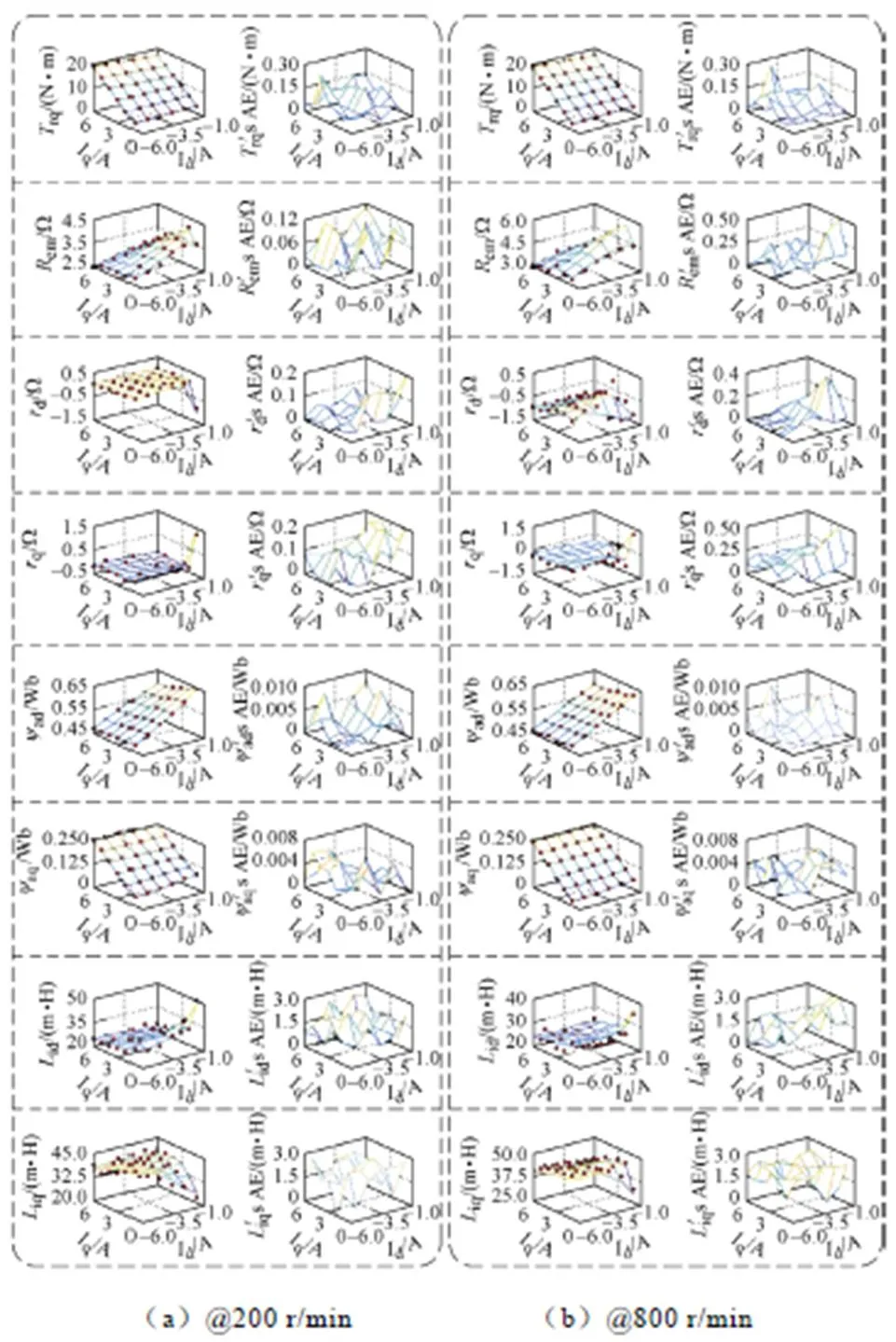
附圖1 不同工況下各電機參數的辨識結果與精度對比
App.Fig.1 The identification results and accuracy comparison of motor parameters under various conditions
[1] 郭磊磊, 王朋帥, 李琰琰, 等. 不同代價函數下永磁同步電機模型預測控制參數失配可視化分析[J]. 電工技術學報, 2023, 38(4): 903-914.
Guo Leilei, Wang Pengshuai, Li Yanyan, et al. Visual analysis of parameters mismatch in model predictive control for permanent magnet synchronous motor under different cost functions[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 903-914.
[2] Balasubramanian L, Bhuiyan N A, Javied A, et al. Design and optimization of interior permanent magnet (IPM) motor for electric vehicle applications[J]. CES Transactions on Electrical Machines and Systems, 2023, 7(2): 202-209.
[3] 朱灑, 曾峰, 陸劍波, 等. 考慮PWM諧波損耗的車用扁線內嵌式永磁同步電機效率圖簡化工程計算[J]. 電工技術學報, 2022, 37(22): 5687-5703.
Zhu Sa, Zeng Feng, Lu Jianbo, et al. Simplified engineering calculation of efficiency map of interior permanent magnet synchronous machines with hairpin windings considering PWM-induced harmonic losses[J]. Transactions of China Electrotechnical Society, 2022, 37(22): 5687-5703.
[4] 高劍, 李承栩, 黃守道, 等. 高磁路飽和永磁同步電機永磁體負載磁鏈動態估算[J]. 電工技術學報, 2022, 37(22): 5638-5648.
Gao Jian, Li Chengxu, Huang Shoudao, et al. Dynamic estimation of permanent magnet load flux linkage of permanent magnet synchronous motor with high magnetic circuit saturation[J]. Transactions of China Electrotechnical Society, 2022, 37(22): 5638- 5648.
[5] Hang Jun, Wu Han, Ding Shichuan, et al. Improved loss minimization control for IPMSM using equivalent conversion method[J]. IEEE Transactions on Power Electronics, 2021, 36(2): 1931-1940.
[6] Reigosa D, Kang Yegu, Martínez M, et al. SPMSMs sensorless torque estimation using high-frequency signal injection[J]. IEEE Transactions on Industry Applications, 2020, 56(3): 2700-2708.
[7] 吳荒原, 王雙紅, 辜承林, 等. 內嵌式永磁同步電機改進型解耦控制[J]. 電工技術學報, 2015, 30(1): 30-37.
Wu Huangyuan, Wang Shuanghong, Gu Chenglin, et al. An improved decoupling control strategy for the IPMSMS[J]. Transactions of China Electrotechnical Society, 2015, 30(1): 30-37.
[8] 李婕, 楊淑英, 謝震, 等. 基于有效信息迭代快速粒子群優化算法的永磁同步電機參數在線辨識[J]. 電工技術學報, 2022, 37(18): 4604-4613.
Li Jie, Yang Shuying, Xie Zhen, et al. Online parameter identification of permanent magnet syn- chronous motor based on fast particle swarm optimization algorithm with effective information iterated[J]. Transactions of China Electrotechnical Society, 2022, 37(18): 4604-4613.
[9] 蘇有成, 陳志輝. 基于電感擾動的三相橫向磁通永磁電機參數辨識與估算位置偏差修正[J]. 電工技術學報, 2023, 38(12): 3165-3175.
Su Youcheng, Chen Zhihui. Parameter identification and estimated position deviation correction of a three- phase transverse flux permanent magnet machine based on inductance perturbation injection[J]. Transactions of China Electrotechnical Society, 2023, 38(12): 3165-3175.
[10] Li Xinyue, Kennel R. General formulation of Kalman- filter-based online parameter identification methods for VSI-fed PMSM[J]. IEEE Transactions on Indu- strial Electronics, 2021, 68(4): 2856-2864.
[11] 連傳強, 肖飛, 高山, 等. 基于實驗標定及雙時間尺度隨機逼近理論的內置式永磁同步電機參數辨識[J]. 中國電機工程學報, 2019, 39(16): 4892-4898, 4991.
Lian Chuanqiang, Xiao Fei, Gao Shan, et al. Parameter identification for interior permanent magnet synchronous motor based on experimental calibration and stochastic approximation theory with two time scales[J]. Proceedings of the CSEE, 2019, 39(16): 4892-4898, 4991.
[12] Dang D Q, Rafaq M S, Choi H H, et al. Online parameter estimation technique for adaptive control applications of interior PM synchronous motor drives[J]. IEEE Transactions on Industrial Electronics, 2016, 63(3): 1438-1449.
[13] Zhang Jindong, Peng Fei, Huang Yunkai, et al. Online inductance identification using PWM current ripple for position sensorless drive of high-speed surface- mounted permanent magnet synchronous machines[J]. IEEE Transactions on Industrial Electronics, 2022, 69(12): 12426-12436.
[14] Choi K, Kim Y, Kim K S, et al. Using the stator current ripple model for real-time estimation of full parameters of a permanent magnet synchronous motor[J]. IEEE Access, 2019, 7: 33369-33379.
[15] Yu Yelong, Huang Xiaoyan, Li Zhaokai. Overall electrical parameters identification for IPMSMs using current derivative to avoid rank deficiency[J]. IEEE Transactions on Industrial Electronics, 2023, 70(7): 7515-7520.
[16] Liu Zirui, Fan Xinggang, Kong Wubin, et al. Improved small-signal injection-based online multi- parameter identification method for IPM machines considering cross-coupling magnetic saturation[J]. IEEE Transactions on Power Electronics, 2022, 37(12): 14362-14374.
[17] Wang Qiwei, Wang Gaolin, Zhao Nannan, et al. An impedance model-based multiparameter identification method of PMSM for both offline and online con- ditions[J]. IEEE Transactions on Power Electronics, 2021, 36(1): 727-738.
[18] 吳春, 趙宇緯, 孫明軒. 采用測量電壓的永磁同步電機多參數在線辨識[J]. 中國電機工程學報, 2020, 40(13): 4329-4340.
Wu Chun, Zhao Yuwei, Sun Mingxuan. Multipara- meter online identification for permanent magnet synchronous machines using voltage measurements[J]. Proceedings of the CSEE, 2020, 40(13): 4329-4340.
[19] Feng Guodong, Lai Chunyan, Mukherjee K, et al. Current injection-based online parameter and VSI nonlinearity estimation for PMSM drives using current and voltage DC components[J]. IEEE Transa- ctions on Transportation Electrification, 2016, 2(2): 119-128.
[20] 谷鑫, 胡升, 史婷娜, 等. 基于神經網絡的永磁同步電機多參數解耦在線辨識[J]. 電工技術學報, 2015, 30(6): 114-121.
Gu Xin, Hu Sheng, Shi Tingna, et al. Muti-parameter decoupling online identification of permanent magnet synchronous motor based on neural network[J]. Transactions of China Electrotechnical Society, 2015, 30(6): 114-121.
[21] 劉細平, 胡衛平, 丁衛中, 等. 永磁同步電機多參數辨識方法研究[J]. 電工技術學報, 2020, 35(6): 1198-1207.
Liu Xiping, Hu Weiping, Ding Weizhong, et al. Research on multi-parameter identification method of permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(6): 1198-1207.
[22] Li Chen, Kudra B, Balaraj V, et al. Absolute inductance estimation of PMSM considering high- frequency resistance[J]. IEEE Transactions on Energy Conversion, 2021, 36(1): 81-94.
[23] Balamurali A, Kundu A, Li Ze, et al. Improved harmonic iron loss and stator current vector determination for maximum efficiency control of PMSM in EV applications[J]. IEEE Transactions on Industry Applications, 2021, 57(1): 363-373.
[24] Kumar P, Bhaskar D V, Muduli U R, et al. Iron-loss modeling with sensorless predictive control of PMBLDC motor drive for electric vehicle appli- cation[J]. IEEE Transactions on Transportation Electrification, 2020, 7(3): 1506-1515.
[25] 曹陽, 劉旭. 計及損耗的混合勵磁電機建模與硬件在環實時仿真系統[J]. 電工技術學報, 2020, 35(22): 4657-4665.
Cao Yang, Liu Xu. Modeling method for hybrid- excited machine and hardware-in-loop real-time simulation system with accounting for loss calcu- lation[J]. Transactions of China Electrotechnical Society, 2020, 35(22): 4657-4665.
[26] Urasaki N, Senjyu T, Uezato K. Relationship of parallel model and series model for permanent magnet synchronous motors taking iron loss into account[J]. IEEE Transactions on Energy Conversion, 2004, 19(2): 265-270.
[27] Senjyu T, Shimabukuro T, Uezato K. Vector control of synchronous permanent magnet motors including stator iron loss[J]. International Journal of Electronics, 1996, 80(2): 181-190.
[28] Kazerooni M, Hamidifar S, Kar N C. Analytical modelling and parametric sensitivity analysis for the PMSM steady-state performance prediction[J]. IET Electric Power Applications, 2013, 7(7): 586-596.
[29] Feng Guodong, Lai Chunyan, Kar N C. A novel current injection-based online parameter estimation method for PMSMs considering magnetic saturation[J]. IEEE Transactions on Magnetics, 2016, 52(7): 1-4.
[30] Zhu Z Q, Liang Dawei, Liu Kan. Online parameter estimation for permanent magnet synchronous machines: an overview[J]. IEEE Access, 2021, 9: 59059-59084.
[31] Kemmetmüller W, Faustner D, Kugi A. Modeling of a permanent magnet synchronous machine with internal magnets using magnetic equivalent circuits[J]. IEEE Transactions on Magnetics, 2014, 50(6): 1-14.
[32] Kim J, Park Y J. Approximate closed-form formula for calculating ohmic resistance in coils of parallel round wires with unequal pitches[J]. IEEE Transa- ctions on Industrial Electronics, 2014, 62(6): 3482- 3489.
[33] Yu Yelong, Huang Xiaoyan, Li Zhaokai, et al. Full parameter estimation for permanent magnet syn- chronous motors[J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 4376-4386.
DC-Signal-Injection-Based Online Parameters Identification for Permanent Magnet Synchronous Machine Considering Variation of Equivalent Electromagnetic Loss Resistance
1,21,21,21,2
(1. College of Electrical Engineering Zhejiang University Hangzhou 310027 China 2. Zhejiang Provincial Key Laboratory of Electrical Machine Systems Hangzhou 310027 China)
Permanent magnet synchronous machines (PMSMs) are widely used for their high operating efficiency. During the application, the parameters of PMSMs may vary a lot when considering the effect of temperature, magnetic saturation, and so on. In this case, the performance of some optimal control strategies, such as the maximum efficiency control and current decoupling control, may decay. Thus, to achieve high-performance control, online parameter identification is important. However, there are few parameter identification methods considering the ferromagnetic loss and its variation with currents, while the ferromagnetic loss occupies a great proportion of the PMSMs’ loss. Therefore, this paper integrates ferromagnetic loss and copper loss as electromagnetic loss. Then, an improved DC-signal-injection-based online parameters identification is proposed considering equivalent electromagnetic loss resistance variation.
Firstly, the magnetic saturation of PMSMs and the variation of electromagnetic loss with current are discussed. Due to the magnetic saturation characteristic of ferromagnetic materials, the magnetic permanence of PMSMs may be decreased as the current rises, which, in turn, affects the inductance and flux linkage. Besides, when considering the change of current vectors, the copper loss may be variable due to the proximate effect. Meanwhile, the ferromagnetic loss may also vary with the changeable magnetic distribution. An improved series electromagnetic loss resistance model is proposed. Apparent flux linkage and incremental inductance are used to characterize the magnetic saturation, and change rates of the equivalent resistance are used to represent variations in electromagnetic loss.
Secondly, 4 groups of d-/q-axis operating currents are chosen based on the criterion of alternating changes in d-/q-axis currents. According to the analysis, if the current increment of each change is non-zero, the steady-state voltage equations of these 4 groups are linearly independent. That is, the corresponding coefficient matrix is full-rank, allowing for the full parameters identification.
Thirdly, a least mean square (LMS) algorithm is adopted to solve the 4 groups of steady-state voltage equations due to the complexity of analytical computation arising from the high-rank coefficient matrix. The LMS algorithm calculates the gradient of voltage estimation errors’ mean square to each model parameter based on the measured voltages, currents, and speeds. Then, the model parameters are updated iteratively based on the corresponding gradients at each step. After iteration, the model parameters that meet the preset voltage estimation accuracy are obtained.
Finally, the accuracy of the proposed method is validated using a prototype PMSM. Experimental results show that, compared with the sinusoidal-signal-injection-based method and the traditional DC-signal-injection- based method, the proposed method is more precise in identifying electromagnetic resistance and apparent flux linkage, with an average relative error of less than 2.3%. In addition, the proposed method has high identification accuracy for torque and incremental inductance, with average relative errors less than 0.9% and 3.5%, respectively. However, there is room for improving the identification performance of the equivalent resistance change rate.
Permanent magnet synchronous machine, electromagnetic loss, parameters identification, DC signal injection
馬銥林 男,1996年生,博士研究生,研究方向為高效能電機系統、數字化設計、鐵磁材料性能測試等。E-mail: mayilin@zju.edu.cn
楊 歡 男,1981年生,教授,博士生導師,研究方向為分布式發電與微電網、智能配用電、高效能電機系統等。E-mail: yanghuan@zju.edu.cn(通信作者)
TM341
10.19595/j.cnki.1000-6753.tces.230176
國家自然科學基金(52177062)和中央高校基本科研業務費專項資金(226-2022-00011)資助項目。
2023-02-16
2023-06-05
(編輯 崔文靜)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
