基于虛擬電阻有源阻尼的LC濾波型永磁同步電機系統預測電流控制
2023-11-22 08:53:56鄭長明董萱萱肖子語陽佳峰
電工技術學報 2023年22期
鄭長明 董萱萱 肖子語 陽佳峰 公 錚
基于虛擬電阻有源阻尼的LC濾波型永磁同步電機系統預測電流控制
鄭長明 董萱萱 肖子語 陽佳峰 公 錚
(中國礦業大學電氣工程學院 徐州 221116)
LC濾波型永磁同步電機(LC-PMSM)驅動系統因具有固有諧振峰而易引起電流環諧振失穩問題,且LC濾波器增大了系統階數,導致常規線性控制方法結構和參數整定復雜。為解決上述問題,該文提出一種基于虛擬電阻有源阻尼的無差拍預測電流控制策略。考慮到逆變器側電感電流可由控制器直接控制,首先,設計了一種結構簡單的電感電流無差拍預測控制器,其能夠實現對定子電流的間接矢量控制;其次,為了抑制系統固有諧振,進一步提出了一種基于濾波電容并聯虛擬電阻的有源阻尼控制策略;最后,給出了系統的閉環穩定性分析及參數設計準則,并通過實驗驗證了所提控制方法的有效性。
永磁同步電機 LC濾波器 預測控制 虛擬電阻 有源阻尼
0 引言
永磁同步電機(Permanent Magnet Synchronous Motor, PMSM)驅動系統以其體積小、無需減速機、高功率密度及高可靠性等優點,近年來在煤炭工業廣受關注。尤其是在井下刮板運輸和深部煤層氣開采等領域,PMSM常置于井下用于運輸或排采,而逆變器則置于井上,二者通過長動力電纜連接[1]。但過長的動力電纜將引起行波反射效應,加劇電機過電壓、軸承損壞和絕緣老化[2]。一種有效的解決方案是在逆變器輸出側安裝LC濾波器,構成LC濾波型PMSM(LC-PMSM)[3]驅動系統。然而,LC濾波器與電機定子電感形成了三階LCL濾波結構,不僅會增大系統模型階數,其固有諧振峰亦將影響系統運行穩定性。因此,探索LC-PMSM驅動系統的高性能電流控制策略尤為關鍵。
目前,國內外學者針對LC濾波型交流電機系統的電流環諧振抑制問題展開了廣泛研究[4-10]。文獻[4]在傳統比例積分(Proportional-Integral, PI)雙閉環控制基礎上額外增加了LC濾波控制環以抑制諧振,但其級聯結構復雜、參數多且整定困難;為簡化控制實現,文獻[5]通過在LC濾波器中增加實體電阻,提出了一種無源阻尼諧振抑制策略,但實體電阻會增大系統有功損耗。為了在不影響系統效率的同時實現與無源阻尼類似的效果,有源阻尼控制方法應運而生[6-9]。文獻[6]提出了一種電感電流反饋加基波電容電流補償的控制策略,通過事先設計諧振點以抑制諧振,但其穩定性易受系統參數的影響;文獻[7]提出了一種基于電感電流反饋的有源阻尼方法,對電感電流提取高頻分量后生成阻尼項,其等效在電感上串聯阻尼電阻;文獻[8]提出了一種前饋方法來抑制諧振,即用電流環輸出參考電壓構造前饋項疊加至定子電流參考中;文獻[9]提出了一種基于電容電流反饋的有源阻尼策略;此外,文獻[10]通過調整控制延遲以滿足系統穩定性要求,但其對采樣頻率要求高、實現復雜。上述文獻均基于雙閉環PI框架外加反饋環路設計,其電流內環不僅需要設計多個比例積分參數,且輸出存在幅值和相位滯后、易引起超調等問題,因而動態響應欠佳、參數整定工作量大[11-12]。
模型預測控制(Model Predictive Control, MPC)以其實現簡單、概念直觀和多目標優化等優勢在PMSM驅動領域應用廣泛[13-14]。目前,國內外學者針對LC-PMSM驅動系統這一特殊應用場合下的MPC研究尚處于起步階段[15-18]。文獻[15]提出了LC-PMSM驅動系統的一種有限集MPC電流控制策略,但其僅考慮對PMSM定子電流的跟蹤而未考慮系統的固有諧振抑制,故導致了穩態性能和運行穩定性不佳;文獻[16]提出了一種基于滯環的有限集MPC策略以抑制諧振電流,在一定程度上改善了系統穩態精度;文獻[17]提出了一種考慮LC濾波器多變量特性的有限集MPC策略,其具有一定的諧振抑制能力,但待設計的權重因子眾多且整定復雜;進一步地,文獻[18]提出了一種長時域多目標有限集MPC,提升了系統穩態精度,但計算量較大且對硬件要求較高。上述文獻所設計的MPC策略均基于有限控制集架構,存在系統穩態性能差、開關頻率不固定、諧波譜分布范圍廣等問題。這不僅不利于輸出LC濾波器的設計,也容易激發未知的諧振動態[19]。此外,上述MPC方法亦未從理論的角度分析系統的閉環穩定性。
針對上述問題,本文提出了一種基于虛擬電阻有源阻尼的無差拍預測電流控制方法。首先,設計了一種電感電流無差拍預測控制器,其實現簡單、開關頻率固定且能夠對定子電流進行間接矢量控制;其次,提出了一種基于濾波電容并聯虛擬電阻的有源阻尼控制策略以抑制系統諧振;再次,給出了系統閉環穩定性分析及參數設計準則;最后,通過實驗驗證了所提控制方案的可行性。
1 LC-PMSM驅動系統數學模型
1.1 系統離散化模型

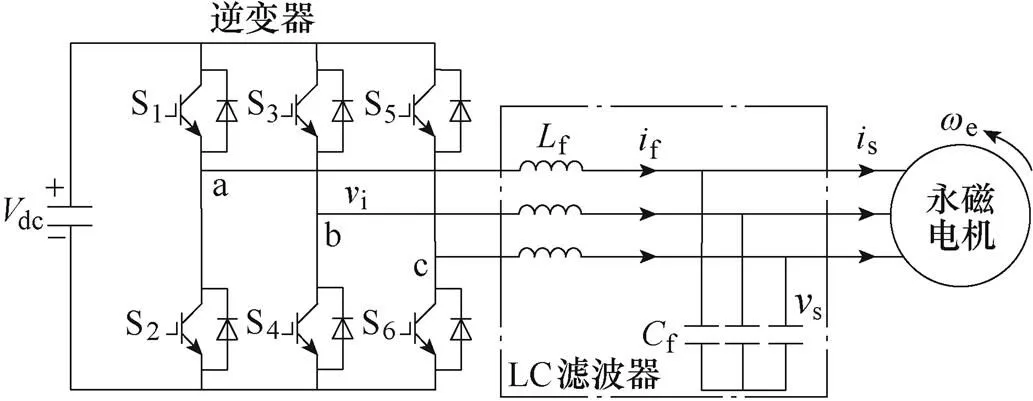
圖1 LC-PMSM驅動系統結構
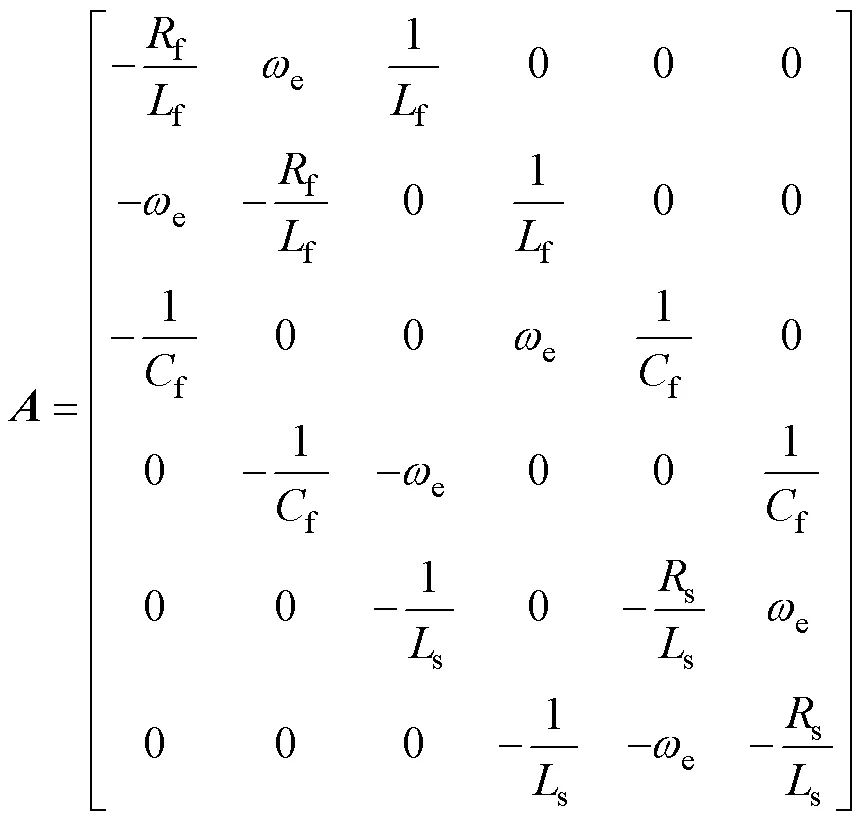
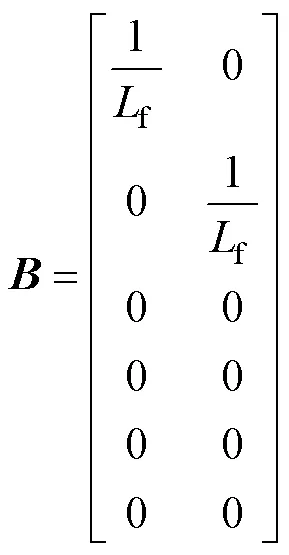
基于圖1,可建立LC濾波型表貼式PMSM驅動系統在連續時間域下的狀態空間方程為
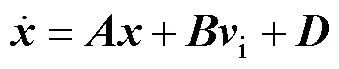
其中


假設系統采樣時間為s,則可利用零階保持器對式(1)進行精確離散化,進而得到系統的離散化狀態空間模型為
其中

其中
式中,f、s、s分別為電感電流、電容電壓和定子電流矩陣;此外,各系數矩陣分別表示為

1.2 系統諧振失穩機理
基于式(1)中LC-PMSM的數學模型,忽略其電壓電流方程中的交叉耦合項,可得到系統dq軸等效電路,如圖2所示。

圖2 LC-PMSM的dq軸等效電路

由式(4)可進一步得到系統諧振頻率為

由式(5)可知,LC-PMSM系統具有固有諧振問題,從而影響系統運行穩定性。而且,相較于無輸出LC濾波器的常規PMSM驅動系統,加入LC濾波器后,電流環控制階數由1階上升為3階,顯著增加了控制難度。因此,亟需設計一種實現簡單且具備諧振抑制能力的高性能電流控制器。
2 基于虛擬電阻有源阻尼的LC-PMSM預測電流控制
為了簡化LC-PMSM系統的控制結構,并有效抑制電流環的諧振失穩,本節提出了一種基于虛擬電阻有源阻尼的電感電流無差拍預測控制策略。
2.1 離散預測模型構建
由式(3)可看出,電感電流受逆變器輸出電壓(即控制器輸出)控制,故可直接建立其預測模型;而電容電壓和定子電流并不直接取決于控制器的輸出,故式(3)中的離散模型無法對電容電壓和定子電流進行直接預測。鑒于此,本文首先利用電感電流預測值f,k+1替換s,k+1表達式中的f,k,即可實現對電容電壓的預測;同理,利用電容電壓預測值s,k+1替換s,k+1表達式中的s,k,即可實現對定子電流的預測。因此,系統離散預測模型可構建為



注意到構建逆變器側電感電流的預測模型最為簡單,為降低控制算法復雜度,本文將基于無差拍控制原理設計LC-PMSM驅動系統的一種電感電流預測控制器。
2.2 電感電流無差拍預測控制器設計
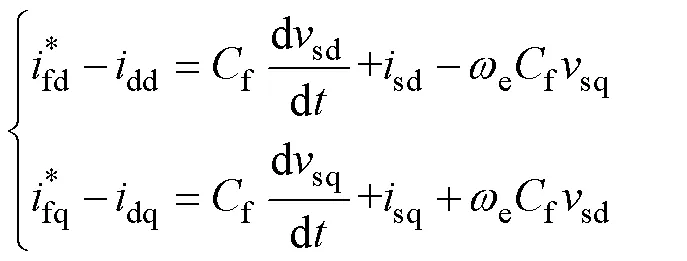
LC-PMSM驅動系統的轉速環輸出為定子電流參考,而電流環預測控制的目標是實現矢量控制。不同于常規PMSM驅動系統,LC-PMSM系統因LC濾波器電容支路的存在,導致其逆變器側電感電流和電機側定子電流之間存在偏差(即電容電流)。為了實施電感電流無差拍預測控制,需首先獲取與定子電流矢量控制相對應的電感電流參考值。其可在系統穩態時基于式(1)求得,即令
其中


2.3 延遲補償


其中


2.4 基于濾波電容并聯虛擬電阻的有源阻尼
式(13)設計的無差拍預測控制器具有實現簡單且無需參數設計的優點。盡管如此,因LC-PMSM系統存在固有諧振問題而將引起電流環失穩。為此,本文在無差拍預測控制基礎上,進一步提出了一種基于濾波電容并聯虛擬電阻的有源阻尼控制策略。
其中

式中,dd、dq為虛擬電阻電流。
因此,在保證硬件電路不變的前提下,從原dq軸電感電流中參考值減去虛擬電阻電流dd和dq,即可等效成在濾波電容上并聯一個虛擬阻尼電阻。
注意到式(14)中的電容電壓sd和sq同時包含基頻和諧波分量。實際實現時為避免有源阻尼影響基頻,可將電容電壓經低通濾波器(Low Pass Filter, LPF)濾除基頻分量后,僅使用其諧波分量進行有源阻尼。此時,相應的虛擬電阻電流為
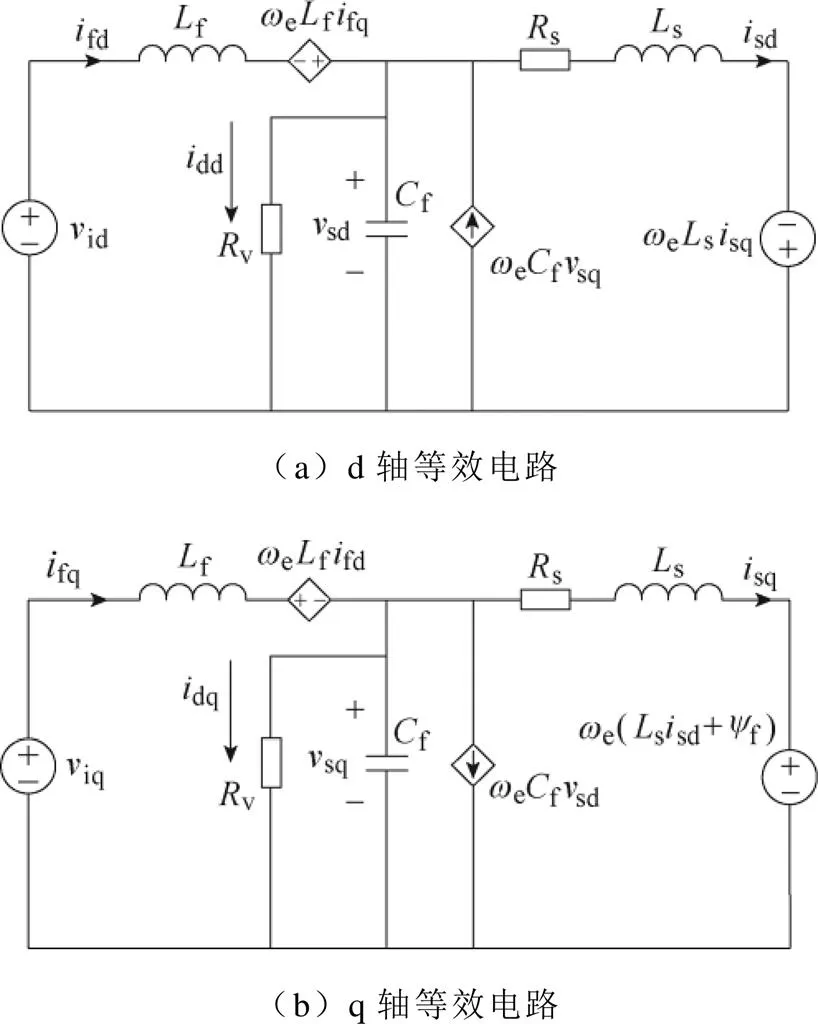
圖3 濾波電容并聯虛擬電阻的dq軸等效電路
式中,sdh,k、sqh,k分別為d、q軸電容電壓諧波分量。

最終,將式(13)中的電感電流參考值替換為式(16),即可得到加入虛擬電阻有源阻尼后的無差拍預測控制電壓參考值。將該電壓參考值經空間矢量調制(Space Vector Modulation, SVM)生成脈沖信號作用于逆變器。所提基于虛擬電阻有源阻尼的無差拍預測電流控制框圖如圖4所示。
圖4 基于虛擬電阻有源阻尼的無差拍預測電流控制框圖
Fig.4 Diagram of a virtual resistive active damping based deadbeat predictive current control
從圖4可看出,所提控制策略待設計參數少且整定簡單。此外,其具有固定開關頻率、穩態性能好且輸出LC濾波器的設計難度低。
3 電流閉環穩定性分析
3.1 定子電流離散閉環傳遞函數推導
其中
同時,定義式(2)中系統的輸出矩陣為
式中,矩陣1、2和3分別對應于系統的輸出變量f,k、s,k和s,k。
因此,加入虛擬電阻有源阻尼的電感電流參考可寫為



將式(20)作為控制輸入回代至系統精確離散狀態模型式(2)中,并以定子電流s,k作為系統輸出變量,可推導出其離散閉環狀態方程為
其中,各系數矩陣表示為

進一步地,對式(21)作離散變換可得

由式(23)可知,在離散域中,由定子電流參考到系統輸出定子電流間的閉環傳遞函數矩陣為
因此,d、q軸定子電流離散閉環傳遞函數分別為i()的第1和第4個對角子元素,有

基于式(25),借助Matlab/Simulink數值計算工具,即可獲得定子電流閉環傳遞函數的極點圖。若極點全部位于平面上以原點為中心的單位圓內,則系統穩定;反之,則不穩定。為分析電流環在不加有源阻尼和加入有源阻尼前后的系統穩定性,首先需對系統的參數進行設計。
3.2 系統參數設計
為了有效濾除系統高次諧波,需合理設計LC濾波器參數[3]。其中,濾波電感f的最小值可由逆變器輸出電流所允許的最大紋波確定,即


同時,濾波電感的最大值則可根據其基波壓降來確定,有


此外,濾波電容可為高次諧波電流提供低阻抗通路,防止其流入電機側。但當電容較大時,會引入較大無功功率而降低系統功率因數。故濾波電容的最大值可由其允許產生的最大無功功率確定,有

為了有效濾除開關次諧波并防止系統諧振峰放大電流諧波,諧振頻率應低于開關頻率并避開諧波較大的頻段;同時,諧振頻率也應遠高于基波頻率,以避免諧振尖峰對基波的影響。因此,系統諧振頻率res通常應滿足


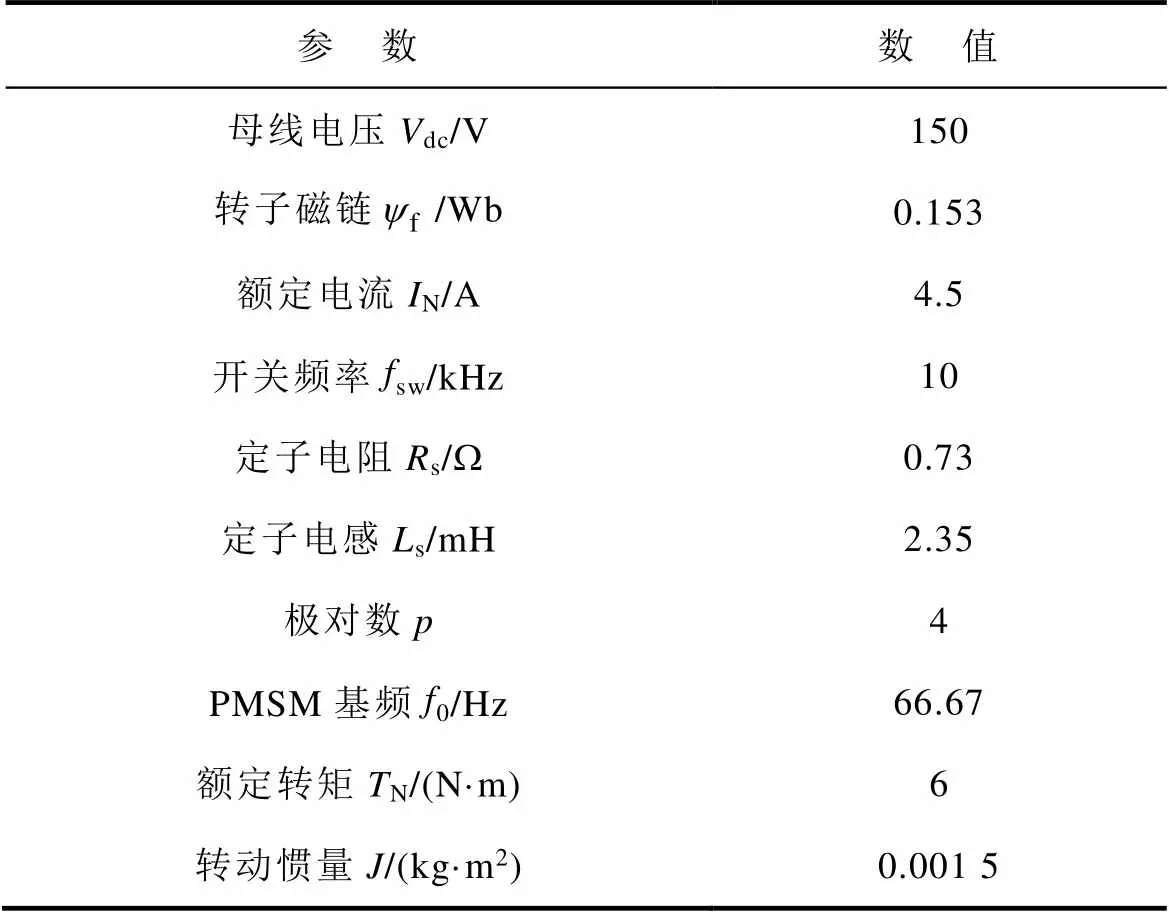
表1 LC-PMSM驅動系統參數
此外,式(15)中用于有源阻尼的虛擬電阻大小可確定[20]為
3.3 有源阻尼對系統穩定性的改善分析
根據所設計的系統參數,即可基于式(25)繪制出轉速為1 000 r/min時,不加和加入虛擬電阻有源阻尼控制下的系統閉環極點分布,如圖5所示。注意到當虛擬阻尼電阻v趨于無窮大時,等效于不加有源阻尼的情形。通過對比圖5a和圖5b可知,采用單一無差拍控制時(不加阻尼),其平面單位圓外存在極點,故將引起系統失穩;而加入虛擬電阻有源阻尼(v=15.73W)后,原有不穩定的閉環極點全部移動至單位圓內,故所提控制策略可有效抑制系統諧振而提升系統的穩定裕度。

圖5 轉速1 000 r/min不加和加入有源阻尼的閉環極點圖
4 實驗驗證
為驗證本文所提基于虛擬電阻有源阻尼的無差拍預測電流控制策略的有效性,搭建了LC濾波型永磁同步電機驅動系統實驗平臺,如圖6所示。平臺包含直流電壓源、三相電壓源逆變器、采樣電路、LC濾波器和600 W三相PMSM等。系統主要參數見表1。其中,數字控制器采用DSP TMS320F28335,采樣頻率s和開關頻率sw均設置為10 kHz,系統突變負載采用磁滯制動器實現。
4.1 穩態性能評估
圖7給出了額定負載條件下,系統轉速分別為400 r/min和1 000 r/min時,無有源阻尼的傳統無差拍預測電流控制下的穩態實驗波形。圖中包括電機轉速、q軸定子電流sq、a相定子電流sa及其諧波譜,以及a相電容電壓sa。可以看出,采用單一無差拍預測電流控制時,濾波電容電壓與電機定子

圖6 LC-PMSM驅動系統實驗平臺

圖7 無有源阻尼的傳統無差拍預測控制穩態實驗波形
電流波形發生了明顯的諧振振蕩現象,故其無法保證系統的穩定運行。通過分析定子電流的諧波譜可知,其諧振頻率在1.6 kHz左右,與理論計算值(1.57 kHz)一致。
圖8給出了額定負載條件下、系統轉速分別為200 r/min、400 r/min和額定1 000 r/min時,采用所提控制策略下的穩態實驗波形。可知,所提控制策略在不同轉速下系統均未激發諧振失穩現象,且定子電流總諧波畸變率(Total Harmonic Distortion, THD)維持在期望水平。因此,所提控制策略能夠有效抑制系統諧振,保證系統運行穩定性。此外,所提控制策略的定子電流諧波集中分布在開關頻率(10 kHz)及其整數倍附近,實現了固定的開關頻率,并方便了輸出LC濾波器的設計。

圖8 所提虛擬電阻有源阻尼的預測控制穩態實驗波形
圖9給出了系統在額定負載條件轉速1 000 r/min時文獻[9]中基于有源阻尼PI控制策略的實驗波形。通過對比圖8c和圖9可知,所提控制策略和文獻[9]中策略具有相當的定子電流穩態性能,這是因為兩種方法最終均采用了SVM。盡管如此,與文獻[9]中所采用的帶有源阻尼的PI電流內環控制器相比,本文所提的有源阻尼預測電流控制策略可省去兩個比例、積分參數的繁雜試湊工作,故能夠在保證較優穩態控制性能的同時有效降低參數整定的復雜度。
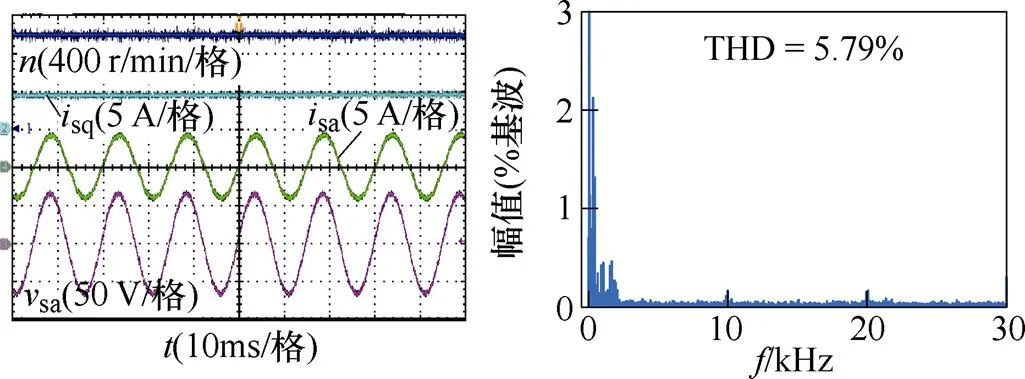
圖9 文獻[9]中控制策略穩態實驗波形
4.2 動態性能評估
圖10為所提基于虛擬電阻有源阻尼的無差拍預測控制策略下系統動態響應實驗波形。其中,圖10a為系統起動時(0 r/min→1 000 r/min)的動態響應實驗波形;而圖10b則為系統突變負載(由額定負載→空載)時的動態響應實驗波形。從圖10a中可看出,PMSM起動過程中定子電流和電容電壓均未出現諧振現象,且轉速可以很快達到其參考值。實質上,PMSM轉速的動態響應主要取決于外環PI控制。此外,從圖10b中可看出,系統突卸額定負載至空載情況下,引起的系統轉速波動不大且能夠很快恢復至參考轉速。以上實驗結果表明,所提控制策略在跟隨參考轉速和抗負載擾動等方面亦具有良好的動態性能。

圖10 所提控制策略下系統動態實驗波形
4.3 不同開關頻率下性能評估
一般來說,開關頻率提高后控制器帶寬亦會提高,故一定程度上可以改善系統穩態性能,反之亦然。為了評估所提控制策略對不同開關頻率的適用性,此處給出了在額定轉速和負載條件下,開關頻率為5 kHz時的實驗波形,如圖11所示。

圖11 所提控制策略5 kHz開關頻率下穩態實驗波形
通過對比圖8c和圖11可知,所提控制策略在10 kHz開關頻率和5 kHz開關頻率下的定子電流穩態控制性能相近,均能保持較低的THD且不失穩。
需要額外說明的是,若開關頻率過低,則可能造成低載波比等問題。因本文主要針對常規PMSM工作時的控制策略設計,低載波比問題對所設計控制策略的影響將是作者未來研究的重要工作之一。
4.4 不同濾波器參數下性能評估
為了評估所提控制策略對不同濾波器參數的適用性,給出了不同濾波器參數下(滿足式(29)中的前提條件)的實驗結果,如圖12所示。

圖12 所提控制策略在不同LC濾波參數下實驗對比
圖12a為實際硬件濾波電感不變,濾波電容降低50%(f:9.5mF→4.75mF)后的穩態實驗波形。而圖12b為濾波電感和濾波電容均降低50%(f:2 mH→1 mH,f:9.5mF→4.75mF)后的穩態實驗波形。對比圖8c和圖12可看出,當LC濾波器參數配置在式(29)規定的范圍內時,系統穩定性基本不受影響。此外,隨著f和f的減小,LC濾波器的截止頻率增大,實驗中的電容電壓紋波略增大,定子電流THD亦從5.12%上升至5.72%,但仍處于較好的期望水平。因此,所提控制策略能夠適應較寬范圍變化的LC濾波器參數。
5 結論
針對LC濾波型PMSM驅動系統,本文提出了一種基于虛擬電阻有源阻尼的無差拍預測電流控制策略。首先,設計了一種電感電流無差拍預測控制器,其結構簡單、開關頻率固定且能夠實現對定子電流的間接控制。其次,提出了一種基于濾波電容并聯虛擬電阻的有源阻尼控制策略,有效抑制了系統諧振。最后,給出了系統的閉環穩定性分析及參數整定方法。實驗結果表明,所提控制策略能有效提升LC-PMSM驅動系統的運行穩定性。
[1] 鄭長明, 陽佳峰, 高昂, 等. 永磁同步電機長線變頻驅動系統定頻滑模預測電流控制[J]. 電工技術學報, 2023, 38(4): 915-924.
Zheng Changming, Yang Jiafeng, Gao Ang, et al. Fixed switching frequency sliding-mode predictive current control of a PMSM variable-frequency drive system with long cables[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 915-924.
[2] 鞠孝偉, 程遠, 楊明亮, 等. SiC逆變器高頻脈沖電壓對Hairpin繞組絕緣安全的影響分析[J]. 電工技術學報, 2021, 36(24): 5115-5124.
Ju Xiaowei, Cheng Yuan, Yang Mingliang, et al. Influence analysis of high frequency pulse voltage of SiC inverter on insulation safety of Hairpin winding[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5115-5124.
[3] 陳東東, 王晉, 李子博, 等. 考慮諧振抑制的永磁同步電機長線纜驅動系統轉子初始位置辨識技術[J]. 電工技術學報, 2022, 37(19): 4938-4946.
Chen Dongdong, Wang Jin, Li Zibo, et al. Rotor initial position identification technology for long cable drive system of permanent magnet synchronous motor considering resonance suppression[J]. Transa- ctions of China Electrotechnical Society, 2022, 37(19): 4938-4946.
[4] Salom?ki J, Hinkkanen M, Luomi J. Influence of inverter output filter on maximum torque and speed of PMSM drives[J]. IEEE Transactions on Industry Applications, 2008, 44(1): 153-160.
[5] 劉寶泉, 郭華, 朱一昕, 等. 三相變流器無源阻尼型LCL濾波器的分析與設計[J]. 電工技術學報, 2017, 32(2): 195-205.
Liu Baoquan, Guo Hua, Zhu Yixin, et al. Analysis and design of a passively damping LCL filter in three- phase converters[J]. Transactions of China Electro- technical Society, 2017, 32(2): 195-205.
[6] 趙仁德, 趙斌, 徐海亮, 等. 帶LC濾波器的永磁同步電機控制系統及策略研究[J]. 電工技術學報, 2019, 34(增刊1): 79-86.
Zhao Rende, Zhao Bin, Xu Hailiang, et al. Research on control method of permanent magnet synchronous motor with LC filter[J]. Transactions of China Elec- trotechnical Society, 2019, 34(S1): 79-86.
[7] Mishra P, Maheshwari R, Patil D. Stabilization of rotor flux-oriented control of induction motor with filter by active damping[J]. IEEE Transactions on Industrial Electronics, 2019, 66(12): 9173-9183.
[8] Mishra P, Maheshwari R. A simple feedforward approach to stabilize VSI-fed induction motor with filter in RFOC[J]. IEEE Transactions on Industrial Electronics, 2020, 67(12): 10191-10201.
[9] Geng Weiwei, Zhang Zhuoran, Li Qiang. Analysis and experimental verification of a conventional inverter with output LC filter to drive ironless stator axial-flux PM motor[J]. IEEE Transactions on Transportation Electrification, 2021, 7(4): 2600-2610.
[10] Yang Ming, Lü Zekai, Xu Donglin, et al. Resonance suppression and EMI reduction of GaN-based motor drive with sine wave filter[J]. IEEE Transactions on Industry Applications, 2020, 56(3): 2741-2751.
[11] 王宏佳, 徐殿國, 楊明. 永磁同步電機改進無差拍電流預測控制[J]. 電工技術學報, 2011, 26(6): 39-45.
Wang Hongjia, Xu Dianguo, Yang Ming. Improved deadbeat predictive current control strategy of permanent magnet motor drives[J]. Transactions of China Electrotechnical Society, 2011, 26(6): 39-45.
[12] 章回炫, 范濤, 邊元均, 等. 永磁同步電機高性能電流預測控制[J]. 電工技術學報, 2022, 37(17): 4335-4345.
Zhang Huixuan, Fan Tao, Bian Yuanjun, et al. Predictive current control strategy of permanent magnet synchronous motors with high performance[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4335-4345.
[13] Rodriguez J, Garcia C, Mora A, et al. Latest advances of model predictive control in electrical drives-part I: basic concepts and advanced strategies[J]. IEEE Transactions on Power Electronics, 2022, 37(4): 3927-3942.
[14] 郭磊磊, 王朋帥, 李琰琰, 等. 不同代價函數下永磁同步電機模型預測控制參數失配可視化分析[J]. 電工技術學報, 2023, 38(4): 903-914.
Guo Leilei, Wang Pengshuai, Li Yanyan, et al. Visual analysis of parameters mismatch in model predictive control for permanent magnet synchronous motor under different cost functions[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 903-914.
[15] Laczynski T, Mertens A. Predictive stator current control for medium voltage drives with LC filters[J]. IEEE Transactions on Power Electronics, 2009, 24(11): 2427-2435.
[16] Walz S, Liserre M. Hysteresis model predictive current control for PMSM with LC filter considering different error shapes[J]. IEEE Open Journal of Power Electronics, 2020, 1: 190-197.
[17] Xue Cheng, Zhou Dehong, Li Yunwei. Finite- control-set model predictive control for three-level NPC inverter-fed PMSM drives with LC filter[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11980-11991.
[18] Geyer T, Karamanakos P, Kennel R. On the benefit of long-horizon direct model predictive control for drives with LC filters[C]//2014 IEEE Energy Con- version Congress and Exposition (ECCE), Pittsburgh, PA, USA, 2014: 3520-3527.
[19] Zheng Changming, Dragicevic T, Zhang Zhenbin, et al. Model predictive control of LC-filtered voltage source inverters with optimal switching sequence[J]. IEEE Transactions on Power Electronics, 2021, 36(3): 3422-3436.
[20] Falkowski P, Sikorski A. Finite control set model predictive control for grid-connected AC-DC con- verters with LCL filter[J]. IEEE Transactions on Industrial Electronics, 2018, 65(4): 2844-2852.
Virtual Resistance Active Damping Based Predictive Current Control of LC-Filtered Permanent Magnet Synchronous Motor System
(School of Electrical Engineering China University of Mining and Technology Xuzhou 221116 China)
To achieve efficient and reliable production and transportation for underground coal mine applications, permanent magnet synchronous motors (PMSMs) are usually placed underground, and inverters are deployed above the mine, connected by long power cables. However, long power cables will aggravate motor overvoltage, bearing damage, and insulation aging. Therefore, it is necessary to install LC filters on the output side of the inverter to form an LC-filtered PMSM drive system (LC-PMSM). However, due to the inherent resonance peak of the system, it is easy to cause the resonance instability of the current loop. Moreover, the LC filter increases the system order, complicating the structure and parameter tuning of the conventional linear control method. Therefore, this paper proposes a deadbeat predictive current control strategy based on virtual resistance active damping.
Firstly, a deadbeat predictive controller of inductor current with a simple structure is designed to realize the indirect control of motor stator current. Then, to suppress the instability of the current loop caused by the inherent resonance of the LC-PMSM system, based on the deadbeat predictive control, an active damping control strategy according to the filter capacitor parallel virtual resistance is designed to ensure the system stability. Finally, the discrete closed-loop transfer function of the current loop is constructed, and the LC filter parameters are designed. The stability of the system is also theoretically analyzed.
Experiments were carried out based on the LC-PMSM system. The experimental results show that when conventional deadbeat predictive current control is used under the rated load condition, the stator current has significant resonance oscillations under different speed values. In contrast, the proposed control strategy does not cause significant resonance instability, and the stator current distortion rate is maintained at the desired level. In addition, the stator current harmonics of the proposed control strategy are concentrated near the switching frequency and its integer multiples, which achieves a fixed switching frequency and facilitates the design of the output LC filter. The dynamic response experiment shows that the proposed method causes no resonance phenomenon during the PMSM starting process, and the speed can quickly reach its reference value. Also, when the system suddenly transitions from a rated load to a no-load condition, the speed fluctuation is small and can quickly return to its reference using the proposed method.
The following conclusions can be drawn through the experimental analysis: (1) The proposed deadbeat predictive current control strategy based on virtual resistance active damping can effectively suppress the system resonance and ensure the stability of the system. (2) The proposed control strategy also has good dynamic performance in following the reference speed and resisting load disturbance. (3) The theoretical stability analysis of the system is given and verified.
Permanent magnet synchronous motor, LC filter, predictive control, virtual resistance, active damping
鄭長明 男,1991年生,講師,碩士生導師,研究方向為永磁同步電機驅動控制與新能源發電系統。E-mail: jsxzzcm@126.com
公 錚 男,1990年生,副教授,博士生導師,研究方向為大容量功率變換拓撲及控制與柔性直流輸配電系統控制及保護。E-mail: zgo@cumt.edu.cn(通信作者)
TM351
10.19595/j.cnki.1000-6753.tces.230582
國家自然科學基金面上項目(52277205)和國家自然科學基金青年科學基金項目(51907196, 52107217)資助。
2023-05-01
2023-05-18
(編輯 崔文靜)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
