面向高速公路事故風(fēng)險(xiǎn)預(yù)測的深度學(xué)習(xí)方法
2023-11-22 08:22:56阮鴻柱黃小弟王金寶杜夢輝
計(jì)算機(jī)技術(shù)與發(fā)展 2023年11期
關(guān)鍵詞:模型
阮鴻柱,黃小弟,王金寶,杜夢輝
(1.云南省綜合交通發(fā)展中心,云南 昆明 650031;2.北京交通大學(xué) 計(jì)算機(jī)與信息技術(shù)學(xué)院,北京 100044)
0 引 言
交通事故對公共安全造成了嚴(yán)重威脅。如果能夠提前準(zhǔn)確預(yù)測高速公路的交通事故風(fēng)險(xiǎn),管理部門可以更好地進(jìn)行交通規(guī)劃,減少交通事故,并發(fā)布交通事故風(fēng)險(xiǎn)警告,駕駛員可以選擇更安全的路線,避免交通危險(xiǎn)。
交通事故風(fēng)險(xiǎn)預(yù)測是指在觀測到的歷史交通事故基礎(chǔ)上,預(yù)測目標(biāo)位置在未來時(shí)間可能發(fā)生潛在交通事故的風(fēng)險(xiǎn)值[1]。除歷史事故風(fēng)險(xiǎn)值之外,還可以分析導(dǎo)致事故發(fā)生的外部因素,如天氣、時(shí)間、車流量等。早期的一些研究使用統(tǒng)計(jì)方法或線性機(jī)器學(xué)習(xí)模型,例如支持向量機(jī)[2],差分整合移動(dòng)平均自回歸模型[3]挖掘交通事故的歷史發(fā)生模式。但是,這些方法難以捕獲到交通事故數(shù)據(jù)中復(fù)雜且非線性的時(shí)空相關(guān)性。因此,一些研究基于深度學(xué)習(xí)方法,利用非線性模型提升交通事故風(fēng)險(xiǎn)預(yù)測的準(zhǔn)確性[4-9]。
盡管現(xiàn)有的很多深度學(xué)習(xí)方法已被有效地應(yīng)用于交通事故風(fēng)險(xiǎn)預(yù)測,但是仍存在以下兩個(gè)挑戰(zhàn),從而影響了現(xiàn)有方法的預(yù)測精度。
第一個(gè)挑戰(zhàn)是交通事故具有不均衡的空間分布[10],比如在交通量較大或者路段交匯情況較復(fù)雜的路段,交通事故數(shù)量可能較多,而一些路況較好的路段上交通事故數(shù)量可能較少。圖卷積網(wǎng)絡(luò)已被廣泛應(yīng)用于捕獲路網(wǎng)中交通數(shù)據(jù)的空間相關(guān)性,但是傳統(tǒng)的圖卷積網(wǎng)絡(luò)需要預(yù)定義鄰接關(guān)系圖以學(xué)習(xí)節(jié)點(diǎn)間的空間相關(guān)性。由于有限的先驗(yàn)知識,預(yù)定義圖難以全面地反映空間相關(guān)性。一方面,由于不同的路段結(jié)構(gòu)特征,相鄰路段的事故分布差異可能較大;另一方面,相隔較遠(yuǎn)的路段,由于具有相似的拓?fù)溥B接關(guān)系,可能具有相似的事故分布。
第二個(gè)挑戰(zhàn)在于交通事故在時(shí)間維的分布非常稀疏[11]。由于事故的偶發(fā)性,一些路段在大部分時(shí)間的事故風(fēng)險(xiǎn)值為零。由于缺乏事故風(fēng)險(xiǎn)樣本,訓(xùn)練好深度神經(jīng)網(wǎng)絡(luò)具有較大的挑戰(zhàn)。此外,由于非風(fēng)險(xiǎn)樣本的數(shù)量遠(yuǎn)大于風(fēng)險(xiǎn)樣本的數(shù)量,交通事故預(yù)測將偏向于輸出零事故風(fēng)險(xiǎn)的結(jié)果,而不是發(fā)現(xiàn)潛在的事故風(fēng)險(xiǎn)。交通事故數(shù)量在時(shí)間維稀疏的問題,并沒能被之前的工作很好地解決。
針對以上兩個(gè)挑戰(zhàn),該文提出一種基于對比學(xué)習(xí)的自適應(yīng)時(shí)空圖卷積網(wǎng)絡(luò)(Contrastive Learning Based Adaptive Spatio-Temporal Graph Convolutional Network,CASTGCN)用于交通事故風(fēng)險(xiǎn)預(yù)測。對于第一個(gè)挑戰(zhàn),基于矩陣分解的思想,該文使用自適應(yīng)圖卷積網(wǎng)絡(luò)[12]以數(shù)據(jù)驅(qū)動(dòng)的方式學(xué)習(xí)節(jié)點(diǎn)間的空間相關(guān)性,解決交通事故空間分布不均衡的問題。對于第二個(gè)挑戰(zhàn),該文設(shè)計(jì)了一種對比學(xué)習(xí)方法,該方法基于Mixup策略[13]生成足夠多的事故風(fēng)險(xiǎn)樣本。設(shè)計(jì)的Mixup策略利用事故數(shù)據(jù)中固有的周期模式,通過聚合兩個(gè)相鄰周的具有相同小時(shí)片的樣本來實(shí)現(xiàn)數(shù)據(jù)增強(qiáng),如果任一樣本是風(fēng)險(xiǎn)樣本,生成的樣本將被標(biāo)記為具有混合得分的風(fēng)險(xiǎn)樣本,否則被標(biāo)記為非風(fēng)險(xiǎn)樣本。經(jīng)過數(shù)據(jù)增強(qiáng),非風(fēng)險(xiǎn)樣本和風(fēng)險(xiǎn)樣本的比例差將顯著減小。然后利用風(fēng)險(xiǎn)和非風(fēng)險(xiǎn)樣本構(gòu)建正例和負(fù)例進(jìn)行有監(jiān)督的對比學(xué)習(xí)。通過對比學(xué)習(xí)使得模型更好地區(qū)分風(fēng)險(xiǎn)樣本和非風(fēng)險(xiǎn)樣本的嵌入表示,從而提升事故預(yù)測的準(zhǔn)確度。
貢獻(xiàn)總結(jié)為:首先,基于自適應(yīng)圖卷積網(wǎng)絡(luò)以數(shù)據(jù)驅(qū)動(dòng)的方式挖掘交通數(shù)據(jù)中復(fù)雜的空間相關(guān)性;其次,基于交通事故數(shù)據(jù)的周期性設(shè)計(jì)了一種Mixup策略并將其整合到對比學(xué)習(xí)方法中,解決事故數(shù)據(jù)在時(shí)間維稀疏的問題,使得模型可以更好地區(qū)分風(fēng)險(xiǎn)樣本和非風(fēng)險(xiǎn)樣本;最后,基于桂林市高速公路數(shù)據(jù),將提出方法與多種預(yù)測方法進(jìn)行對比,驗(yàn)證了提出方法的有效性和先進(jìn)性。
1 前置定義
1.1 高速公路路網(wǎng)
將高速公路路網(wǎng)定義為一個(gè)無向圖G=(L,E),其中L={l0,l1,…,lM}是|L|=M個(gè)路段的集合,E是|E|=Q條邊的集合。如果車輛可以從路段li通向路段lj,則路段li和路段lj存在連接關(guān)系,(li,lj)表示連接路段li和路段lj的邊。
1.2 交通事故風(fēng)險(xiǎn)
首先,根據(jù)交通事故的具體情況將其分為3種類型:輕型事故、中型事故、嚴(yán)重事故。對于第t個(gè)時(shí)間間隔中的一個(gè)路段,給定第k個(gè)類型的交通事故數(shù)量nk,該路段的風(fēng)險(xiǎn)指數(shù)(risk)定義為不同類別交通事故的加權(quán)求和:
(1)
其中,wk表示不同類型交通事故的權(quán)重:w1=1表示輕型事故,w2=2表示中型事故,w3=3表示嚴(yán)重事故。
1.3 圖信號矩陣
在第t個(gè)時(shí)間間隔內(nèi),觀測到高速公路路網(wǎng)G上的圖信號用矩陣Xt=(xt,1,xt,2,…,xt,M)T∈RM×C表示,其中xt,i∈RC表示第t個(gè)時(shí)間間隔內(nèi)路段lj的C個(gè)觀測量的取值。
1.4 交通事故風(fēng)險(xiǎn)預(yù)測
在交通事故風(fēng)險(xiǎn)預(yù)測任務(wù)中,給定歷史T個(gè)時(shí)間間隔的時(shí)空圖信號矩陣χ=(X1,X2,…,XT),預(yù)測所有路段在第T+1個(gè)時(shí)間間隔的交通風(fēng)險(xiǎn)指數(shù):
YT+1=Fθ(X1,X2,…,XT)
(2)
其中,θ為模型參數(shù),YT+1∈RM為預(yù)測得到的所有路段的事故風(fēng)險(xiǎn)指數(shù)值。
2 方法介紹
該文提出一種基于對比學(xué)習(xí)的自適應(yīng)時(shí)空圖卷積網(wǎng)絡(luò)(CASTGCN)用于交通事故風(fēng)險(xiǎn)預(yù)測,如圖1所示。輸入歷史多個(gè)時(shí)間間隔的時(shí)空圖信號矩陣,通過自適應(yīng)空間相關(guān)性建模、自適應(yīng)時(shí)間相關(guān)性建模、卷積層捕獲時(shí)空圖信號矩陣中的時(shí)空相關(guān)性,然后通過預(yù)測層得到各個(gè)路段在未來的交通風(fēng)險(xiǎn)指數(shù),采用均方誤差損失函數(shù)指導(dǎo)模型訓(xùn)練。另一方面,通過Mixup數(shù)據(jù)增廣方法生成事故風(fēng)險(xiǎn)樣本,通過自適應(yīng)時(shí)空相關(guān)性建模得到風(fēng)險(xiǎn)樣本和非風(fēng)險(xiǎn)樣本的嵌入表示,利用增廣樣本的嵌入表示進(jìn)行有監(jiān)督的對比學(xué)習(xí),使模型更好地區(qū)分風(fēng)險(xiǎn)樣本和非風(fēng)險(xiǎn)樣本。
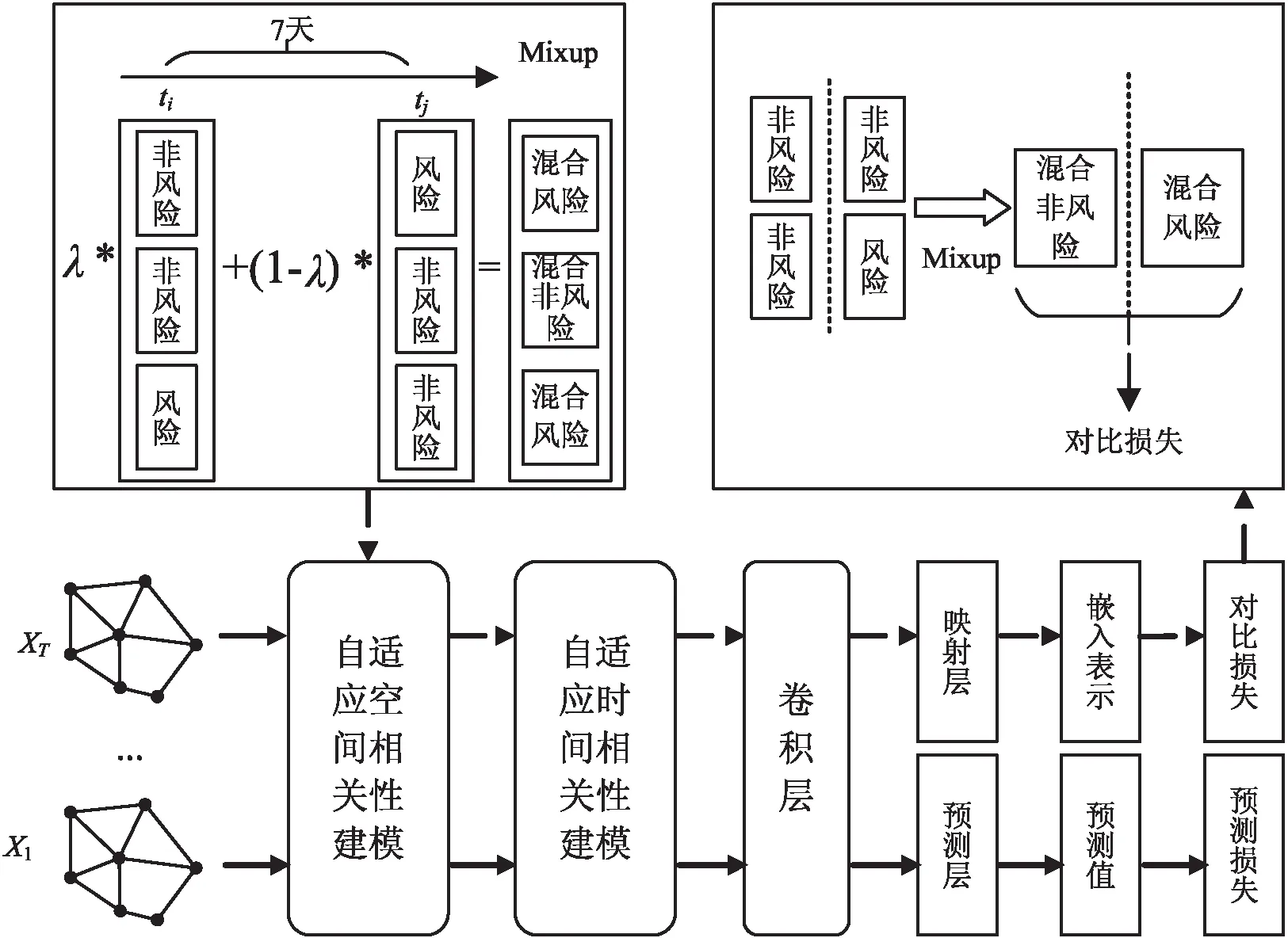
圖1 基于對比學(xué)習(xí)的自適應(yīng)圖卷積網(wǎng)絡(luò)
2.1 輸入層

2.2 自適應(yīng)空間相關(guān)性建模
圖卷積網(wǎng)絡(luò)因其具有學(xué)習(xí)圖結(jié)構(gòu)數(shù)據(jù)中的空間相關(guān)性的能力被廣泛用于交通流預(yù)測。目前普遍使用的圖卷積計(jì)算公式如下:
(3)
其中,A∈RN×N為鄰接矩陣,D為度矩陣,X∈RN×C為圖信號輸入,H∈RN×F為圖卷積計(jì)算的輸出,W∈RC×F和b∈RF為可學(xué)習(xí)參數(shù)。圖卷積通過一組共享的參數(shù)W和b聚合節(jié)點(diǎn)自身和鄰接節(jié)點(diǎn)信息,實(shí)現(xiàn)空間特征提取。
傳統(tǒng)圖卷積計(jì)算通常使用預(yù)定義的鄰接矩陣A,鄰接矩陣A通常基于距離計(jì)算得到。這種方法的局限性在于節(jié)點(diǎn)特征在圖上的傳播將完全依賴于預(yù)定義的圖結(jié)構(gòu),而預(yù)定義的圖結(jié)構(gòu)難以保證其能完全包含路網(wǎng)交通數(shù)據(jù)中復(fù)雜的空間相關(guān)性。一方面,由于不同的路段結(jié)構(gòu)特征,相鄰路段的事故分布差異可能較大;另一方面,相隔較遠(yuǎn)的路段,由于具有相似的拓?fù)溥B接關(guān)系,可能具有相似的事故分布,如圖2所示。
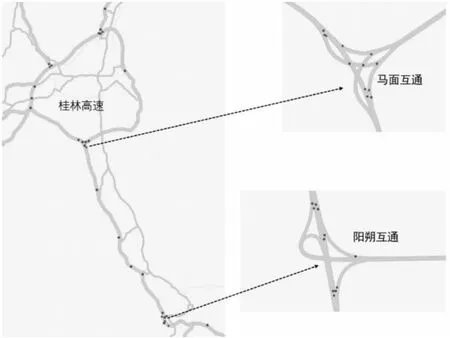
圖2 桂林高速公路事故(圓點(diǎn))的空間分布 (2022年3月5日8時(shí)至2022年3月12日8時(shí))

(4)
自適應(yīng)鄰接矩陣不需要任何先驗(yàn)知識,在訓(xùn)練過程中通過反向傳播機(jī)制學(xué)習(xí)自適應(yīng)鄰接矩陣的參數(shù),以數(shù)據(jù)驅(qū)動(dòng)的方式學(xué)習(xí)路網(wǎng)交通數(shù)據(jù)中的空間相關(guān)性。
(5)
其中Xt為第t個(gè)時(shí)間片下的圖信號矩陣。
2.3 自適應(yīng)時(shí)間相關(guān)性建模
在時(shí)間維度上,不同時(shí)間段的路網(wǎng)信息之間存在顯著的相關(guān)性,在不同情況下的時(shí)間相關(guān)性也不同。因此基于注意機(jī)制[14]對歷史不同時(shí)間步的交通數(shù)據(jù)賦予不同相關(guān)性。使用如下公式計(jì)算出時(shí)間注意力矩陣:
C=V·σ(((H)TU1)U2(U3H)+e)
(6)
(7)
其中,V,e∈RT×T,U1∈RN,U2∈RF×M,U3∈RF是可學(xué)習(xí)參數(shù)。時(shí)間相關(guān)性矩陣C的值根據(jù)輸入的圖信號矩陣自適應(yīng)學(xué)習(xí)得到,其中元素Ci,j表示時(shí)間片i和j下路網(wǎng)信息的相關(guān)性。最后,使用Softmax函數(shù)對矩陣進(jìn)行歸一化。用計(jì)算得到時(shí)間注意力矩陣與空間相關(guān)性建模得到的嵌入表示相乘,得到新的時(shí)空圖表示:
H'=HC'=(HS-T+1,HS-T+2,…,HS)
(8)

H'(r)=ReLU(Φ*H'(r-1))∈RFr×M×Tr
(9)
其中,*表示標(biāo)準(zhǔn)卷積計(jì)算,Φ為時(shí)間維卷積核參數(shù),Fr表示第r步卷積后圖節(jié)點(diǎn)的特征維度,Tr表示第r步卷積后時(shí)間維度大小。最終輸出為:
Z=ReLU(Φ*H'(R))∈RFout×M
(10)
在得到聚合前T個(gè)時(shí)間段時(shí)空相關(guān)性的路段嵌入表示Z后,通過一個(gè)多層感知機(jī)作為預(yù)測器,得到所有路段在第T+1個(gè)時(shí)間段的交通風(fēng)險(xiǎn)指數(shù)YT+1=MLP(Z)。
2.4 基于Mixup的數(shù)據(jù)增廣
傳統(tǒng)的對比學(xué)習(xí)方法[15]通過對樣本進(jìn)行數(shù)據(jù)增強(qiáng)得到正樣本對和負(fù)樣本對,然后利用正、負(fù)樣本對計(jì)算對比損失以實(shí)現(xiàn)表示學(xué)習(xí)。表示學(xué)習(xí)的目的是使正樣本對在嵌入空間中的差異性更小,負(fù)樣本對在嵌入空間中的差異性更大,從而使得模型更好地區(qū)分正樣本對和負(fù)樣本對。盡管傳統(tǒng)的對比學(xué)習(xí)方法在很多領(lǐng)域廣泛應(yīng)用,但是,由于交通事故數(shù)據(jù)的稀疏性(如圖3所示),引入對比學(xué)習(xí)難以直接使模型更好地區(qū)分事故風(fēng)險(xiǎn)樣本和非事故風(fēng)險(xiǎn)樣本。相比于大量的非事故風(fēng)險(xiǎn)樣本,少量的事故風(fēng)險(xiǎn)樣本使得模型難以學(xué)習(xí)到事故風(fēng)險(xiǎn)數(shù)據(jù)的分布,從而難以調(diào)整模型參數(shù)實(shí)現(xiàn)事故風(fēng)險(xiǎn)的預(yù)測。
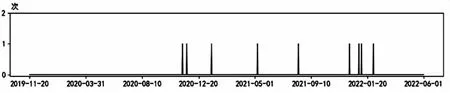
(a)嚴(yán)關(guān)塘堡互通-溶江至溶江-靈川西路段
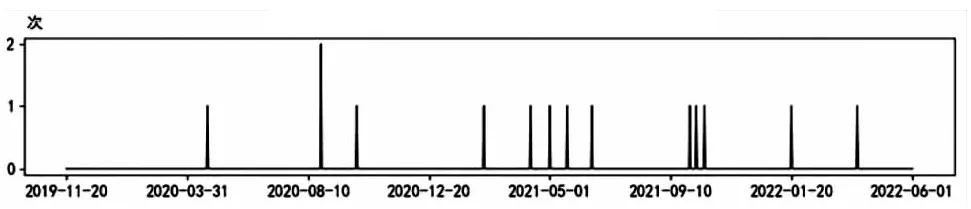
(b)桂林東-堯山至堯山-靈川路段圖3 桂林高速公路事故數(shù)量隨時(shí)間的分布(2021年11月20日0時(shí)至2022年6月1日0時(shí))
為減輕因事故風(fēng)險(xiǎn)樣本稀疏帶來的影響,該文基于Mixup數(shù)據(jù)增廣方法生成足夠多的事故風(fēng)險(xiǎn)樣本。通過對交通事故的時(shí)空分析可知,其發(fā)生時(shí)間具有以周為單位的周期性,即不同周的相同周中天發(fā)生交通事故的概率相比于不同周中天發(fā)生交通事故的概率更接近。基于這種周期性,通過構(gòu)造兩個(gè)連續(xù)周具有相同時(shí)間戳樣本xi和xj的凸組合生成增廣樣本:
Xmix={λxi+(1-λ)xj|ti-tj=7天}
(11)
Ymix={λyi+(1-λ)yj|ti-tj=7天}
(12)
其中,λ為混合參數(shù),用于調(diào)節(jié)兩個(gè)數(shù)據(jù)源的影響。如果xi或xj為事故風(fēng)險(xiǎn)樣本,則將生成的增廣樣本標(biāo)記為事故風(fēng)險(xiǎn)樣本。
2.5 對比學(xué)習(xí)方法
在實(shí)現(xiàn)基于Mixup的數(shù)據(jù)增廣后,通過對比學(xué)習(xí)方法利用增廣后的數(shù)據(jù)解決事故風(fēng)險(xiǎn)數(shù)據(jù)在時(shí)間維度稀疏的問題。
首先,根據(jù)數(shù)據(jù)增廣后的風(fēng)險(xiǎn)值對生成的事故風(fēng)險(xiǎn)/非風(fēng)險(xiǎn)樣本進(jìn)行分組,得到正例集合和負(fù)例集合。具體的,風(fēng)險(xiǎn)值大于0的樣本構(gòu)成正例集合,風(fēng)險(xiǎn)值等于0的樣本構(gòu)成負(fù)例集合。
然后,將正例集合和負(fù)例集合輸入由自適應(yīng)空間相關(guān)性建模和自適應(yīng)時(shí)間相關(guān)性建模構(gòu)成的編碼器f(·),通過映射函數(shù)g(·)得到增廣樣本的嵌入表示Zpos和Zneg:
Zpos={g(f(xi))|xi∈Xmix,yi>0}
(13)
Zneg={g(f(xi))|xi∈Xmix,yi=0}
(14)
最后,利用增廣樣本的嵌入表示在潛在空間進(jìn)行有監(jiān)督的對比學(xué)習(xí),使得模型更好地區(qū)分事故風(fēng)險(xiǎn)樣本和非事故風(fēng)險(xiǎn)樣本。受益于基于Mixup的數(shù)據(jù)增廣,更多的事故風(fēng)險(xiǎn)樣本的特征可以被模型充分利用,從而防止對比學(xué)習(xí)在非事故風(fēng)險(xiǎn)樣本上發(fā)生過擬合,通過學(xué)習(xí)到更好的事故風(fēng)險(xiǎn)嵌入表示實(shí)現(xiàn)更準(zhǔn)確的交通事故風(fēng)險(xiǎn)預(yù)測。
在交通事故風(fēng)險(xiǎn)預(yù)測中,對比損失的目的是使得事故風(fēng)險(xiǎn)樣本的嵌入表示構(gòu)成的正樣本的相似度更高,非事故風(fēng)險(xiǎn)樣本的嵌入表示構(gòu)成的負(fù)樣本對的相似度更低:
(15)
其中,sim(·)表示余弦相似度。
2.6 損失函數(shù)
訓(xùn)練過程中,損失函數(shù)包括通過原始數(shù)據(jù)計(jì)算的事故風(fēng)險(xiǎn)預(yù)測損失LF和增廣數(shù)據(jù)計(jì)算的對比損失LC。LF由預(yù)測值和真實(shí)值的均方誤差計(jì)算得到:
(16)

總的損失函數(shù)L為兩項(xiàng)損失函數(shù)的組合,參數(shù)α控制對比學(xué)習(xí)的影響:
L=LF+αLC
(17)
2.7 模型訓(xùn)練
模型訓(xùn)練的損失函數(shù)使用均方誤差函數(shù),優(yōu)化算法選用Adam算法[16],Adam算法是一種基于“動(dòng)量”思想的隨機(jī)梯度下降算法,在迭代前計(jì)算梯度的二階動(dòng)量并計(jì)算滑動(dòng)平均值,并用于更新參數(shù)。
3 實(shí)驗(yàn)與結(jié)果
實(shí)驗(yàn)使用桂林市路網(wǎng)區(qū)域的交通數(shù)據(jù),共有36個(gè)路段,從2019年11月20日到2022年6月1日。按6∶2∶2的比例劃分訓(xùn)練集、驗(yàn)證集和測試集,使用訓(xùn)練集的均值和標(biāo)準(zhǔn)差對所有數(shù)據(jù)進(jìn)行歸一化,輸入T=10個(gè)時(shí)間步的數(shù)據(jù),預(yù)測未來1個(gè)時(shí)間步的交通事故風(fēng)險(xiǎn)指數(shù)。
3.1 評價(jià)指標(biāo)
從回歸和排序兩方面驗(yàn)證提出的模型的預(yù)測性能。該文用平均絕對誤差(Mean Absolute Error,MAE)從回歸的角度評價(jià)預(yù)測準(zhǔn)確率。通過Recall和MAP以排序的角度評測事故風(fēng)險(xiǎn)區(qū)域的預(yù)測準(zhǔn)確度。在時(shí)間間隔t(1≤t≤T),如果在kt個(gè)路段存在事故風(fēng)險(xiǎn),Recall表示真實(shí)具有事故風(fēng)險(xiǎn)的kt個(gè)路段與預(yù)測得到事故風(fēng)險(xiǎn)值最高的kt個(gè)路段的重合率。MAP表示預(yù)測路段的平均準(zhǔn)確率。MAE越低,表示模型預(yù)測的交通事故風(fēng)險(xiǎn)指數(shù)越準(zhǔn)確,Recall和MAP越高則表示模型識別事故風(fēng)險(xiǎn)的能力越強(qiáng)。MAE,Recall,MAP的計(jì)算公式為:
(18)
(19)
(20)
3.2 基線模型
將提出模型(CASTGCN)與其他6種現(xiàn)有可用于交通事故風(fēng)險(xiǎn)指數(shù)預(yù)測的模型進(jìn)行了對比。
MLP[17]:多層感知機(jī),通過設(shè)置隱藏層捕獲高階函數(shù)關(guān)系。
LSTM[18]:一種經(jīng)典的循環(huán)神經(jīng)網(wǎng)絡(luò)模型,廣泛用于處理序列數(shù)據(jù)。
SVM[19]:一種基于交通流穩(wěn)定性系數(shù)和支持向量機(jī)的交通風(fēng)險(xiǎn)預(yù)測方法。
ISTGCN[11]:一種使用改進(jìn)的時(shí)空圖卷積網(wǎng)絡(luò)預(yù)測交通風(fēng)險(xiǎn)的方法。
ASTGCN[20]:一種用于交通指數(shù)預(yù)測的基于注意力的時(shí)空圖卷積模型,其在時(shí)間和空間為都應(yīng)用了集合注意力機(jī)制的卷積操作。
AGCRN[12]:一種應(yīng)用了自適應(yīng)圖卷積和循環(huán)神經(jīng)網(wǎng)絡(luò)的交通風(fēng)險(xiǎn)預(yù)測模型。
3.3 實(shí)驗(yàn)與環(huán)境設(shè)置
文中模型基于Pytorch框架實(shí)現(xiàn),自適應(yīng)圖神經(jīng)網(wǎng)絡(luò)的節(jié)點(diǎn)嵌入維度為32,圖卷積、時(shí)間注意力卷積、隱藏層大小均設(shè)置為32,對比損失權(quán)重α設(shè)置為0.2,混合參數(shù)λ設(shè)置為0.1。時(shí)間注意力卷積模塊在時(shí)間維度堆疊了3層卷積得到最終預(yù)測結(jié)果。模型訓(xùn)練采用了Adam優(yōu)化算法,初始學(xué)習(xí)率為0.000 1,訓(xùn)練批次大小為128。實(shí)驗(yàn)使用Python 3.6編寫,Pytorch框架版本1.10.2,硬件配置如表1所示。

表1 實(shí)驗(yàn)硬件配置
3.4 實(shí)驗(yàn)結(jié)果分析
按上述使用不同的方法在相同場景下進(jìn)行預(yù)測,結(jié)果如表2所示。
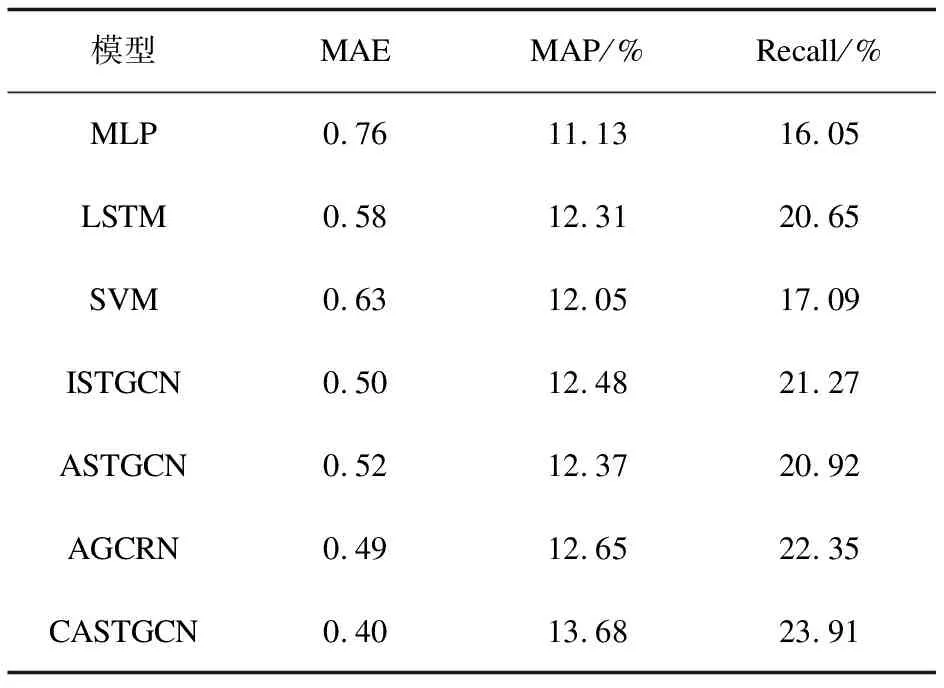
表2 不同方法在數(shù)據(jù)集上的實(shí)驗(yàn)結(jié)果比較
從表2可以看出,文中模型在3種評價(jià)指標(biāo)中均達(dá)到了最佳性能。其中,MLP是經(jīng)典深度學(xué)習(xí)結(jié)構(gòu),可以用于幾乎所有預(yù)測任務(wù),但由于其結(jié)構(gòu)單一,在預(yù)測事故風(fēng)險(xiǎn)時(shí)缺少相應(yīng)的模塊建模路網(wǎng)信息的時(shí)空相關(guān)性,導(dǎo)致效果并不理想。SVM基于交通流穩(wěn)定性系數(shù)為輸入,并且不需要搜索最優(yōu)參數(shù),效果優(yōu)于MLP,但這種方法將各個(gè)路段的特征及風(fēng)險(xiǎn)當(dāng)作獨(dú)立的樣本,無法建模路網(wǎng)信息的時(shí)空相關(guān)性,因此預(yù)測能力有限。
LSTM有能力捕獲時(shí)間序列上長短期依賴,但是其難以捕獲空間維度上路網(wǎng)信息的相關(guān)性,其效果仍然有限。ISTGCN,ASTGCN和AGCRN作為時(shí)空數(shù)據(jù)預(yù)測模型,都集成了空間和時(shí)間兩個(gè)維度的處理模塊。然而,ISTGCN和ASTGCN都基于預(yù)定義的鄰接矩陣捕獲特征的空間屬性,其效果稍弱于使用了自適應(yīng)圖卷積的AGCRN,因?yàn)榛陬A(yù)定義的圖難以建模路網(wǎng)信息中完整的空間相關(guān)性。該文基于Mixup策略設(shè)計(jì)數(shù)據(jù)增廣方法,使用對比學(xué)習(xí)解決事故數(shù)據(jù)在時(shí)間維稀疏的問題,獲得了更好的事故風(fēng)險(xiǎn)樣本的嵌入表示。此外,該文將自適應(yīng)圖學(xué)習(xí)和注意力機(jī)制結(jié)合,以數(shù)據(jù)驅(qū)動(dòng)的方式挖掘交通數(shù)據(jù)中復(fù)雜的時(shí)空相關(guān)性,從而實(shí)現(xiàn)了最佳效果。
3.5 消融實(shí)驗(yàn)分析
為進(jìn)一步分析模型各個(gè)組件的作用,設(shè)計(jì)了原模型的3個(gè)變體進(jìn)行消融實(shí)驗(yàn),將這3個(gè)變體與原模型進(jìn)行比較。變體的描述如下:
wo_S:在原CASTGCN基礎(chǔ)上,不使用自適應(yīng)圖卷積建模路網(wǎng)信息的空間相關(guān)性;
wo_T:在CASTGCN基礎(chǔ)上,不使用時(shí)間注意力機(jī)制建模路網(wǎng)信息的時(shí)間相關(guān)性;
wo_Cta:在CASTGCN基礎(chǔ)上,不使用對比學(xué)習(xí)方法,將對比損失權(quán)重α設(shè)置為0。
消融實(shí)驗(yàn)的結(jié)果如表3所示。
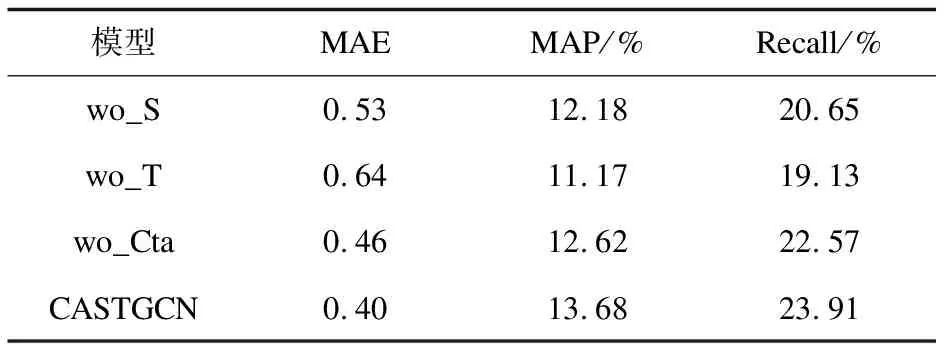
表3 消融實(shí)驗(yàn)結(jié)果
首先,在不建模路網(wǎng)信息的空間相關(guān)性的情況下(wo _S),模型在各項(xiàng)指標(biāo)上都有所降低,由于具有相似拓?fù)溥B接關(guān)系,相似流量等交通量變化情況路段間的事故風(fēng)險(xiǎn)存在相關(guān)性,因此該文通過自適應(yīng)圖卷積捕獲路網(wǎng)信息的空間相關(guān)性是有效的。此外,在不建模路網(wǎng)信息的時(shí)間相關(guān)性的情況下(wo _T),模型表現(xiàn)顯著降低,因此該文基于注意力機(jī)制自適應(yīng)地學(xué)習(xí)路網(wǎng)信息的時(shí)間相關(guān)性對于準(zhǔn)確地事故風(fēng)險(xiǎn)預(yù)測是有效的。最后,在不使用對比損失的情況下(wo _Cta),模型效果有所降低,這說明基于Mixup策略的數(shù)據(jù)增廣緩解了事故數(shù)量稀疏的影響,引入對比損失可以使模型更好地區(qū)分風(fēng)險(xiǎn)樣本和非風(fēng)險(xiǎn)樣本,因此實(shí)現(xiàn)了更準(zhǔn)確的事故風(fēng)險(xiǎn)預(yù)測。
4 結(jié)束語
為更準(zhǔn)確地預(yù)測高速公路的事故風(fēng)險(xiǎn),該文提出了一種基于自適應(yīng)時(shí)空相關(guān)性建模和對比學(xué)習(xí)的深度學(xué)習(xí)模型。使用自適應(yīng)圖卷積網(wǎng)絡(luò)捕獲路網(wǎng)信息的空間相關(guān)性,解決基于預(yù)定義圖的圖卷積運(yùn)算難以包含路網(wǎng)信息完整空間相關(guān)性的問題。此外,基于注意力機(jī)制自適應(yīng)建模路網(wǎng)信息的時(shí)間相關(guān)性,然后通過卷積層進(jìn)一步聚合相鄰時(shí)間片間的信息。接著,基于Mixup策略實(shí)現(xiàn)數(shù)據(jù)增廣,解決交通事故在時(shí)間維度分布稀疏的問題,并利用對比學(xué)習(xí)方法使模型更好地區(qū)分風(fēng)險(xiǎn)樣本和非風(fēng)險(xiǎn)樣本,以實(shí)現(xiàn)更準(zhǔn)確的事故風(fēng)險(xiǎn)預(yù)測。最后,通過實(shí)驗(yàn)證明了提出方法的有效性和先進(jìn)性。今后將進(jìn)一步挖掘高速公路靜態(tài)特征數(shù)據(jù),比如是否存在彎道、匝道、下坡等,以更全面地建模影響高速公路事故風(fēng)險(xiǎn)的因素。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19