含雙蓄電池的光儲直流微網下垂控制策略
2023-11-24 09:27:18吳子豐張靜梅孫鶴旭
可再生能源 2023年11期
關鍵詞:方法
潘 雷,吳子豐,張靜梅,龐 毅,孫鶴旭
(1.天津城建大學 控制與機械工程學院,天津 300384;2.河北科技大學 電氣工程學院,河北 石家莊 050091)
0 引言
太陽能具有很高的清潔度和豐富度,因此近年來光伏發電模塊的使用率大大增加[1],[2]。光伏發電模塊作為直流源與交流系統互連,需要增加一個直流-交流變換器,降低了系統的效率。直流微網采用直流母線,在連接光伏發電模塊、蓄電池、直流負載時,省去了逆變器及整流器,因此直流微網具備提高系統的整體效率的能力[3],[4]。由于光伏發電具有隨機性、間歇性[5],在孤島模式中光伏發電模塊處于最大功率追蹤(MPPT)時,直流母線電壓穩定主要通過儲能單元(本文采用蓄電池組)來維持[6]。與大電網設施相比,蓄電池組的總容量和額定功率有限,特別是當光伏發電模塊的輸出功率高于負載消耗功率時直流母線電壓會上升,反之直流母線電壓會下降[7]。因此蓄電池組控制至關重要。
近年來國內外學者對直流微網中儲能單元控制進行了廣泛的研究。對于環流問題,文獻[8],[9]指出環流是因線路電阻不同導致的,但是沒有進一步討論線路電阻對蓄電池荷電狀態(State of Charge,SoC)的影響。蓄電池SoC用來反應電池的剩余可用容量,其數值上定義為蓄電池剩余容量與電池總容量的比值。文獻[10]提出了一種包含上升系數和下垂系數的下垂控制方法,可以解決環流和SoC不平衡問題,但是該上升系數和下垂系數都是固定的,不能適應直流微網的各種動態變化。文獻[11]提出了一種自適應下垂系數,可以改善重負載時兩個直流源之間電壓偏差大的問題,但是在輕負載情況下電流偏差反而加重了,同時該方法不能解決SoC不平衡問題。文獻[12]~[14]為解決蓄電池SoC不平衡問題,采用了基于蓄電池充放電功率的下垂控制方法來平衡蓄電池SoC以及充放電功率。
本文采用一種基于蓄電池單元充放電電流的下垂控制來平衡SoC,以虛擬阻抗作為下垂系數,從而直接參與蓄電池間的環流抑制。本文量化分析了因線路電阻不相等引起的環流和各蓄電池SoC不平衡現象;提出了一種改進自適應下垂控制,可以改善傳統下垂控制在輕負載時兩個蓄電池之間的電流偏差大的問題,同時解決了環流和雙蓄電池的SoC不平衡問題,與傳統平衡SoC方法相比,本文所提平衡SoC方法能夠參與抑制環流。本文所提出的方法是一種分布式控制方法,只需要器件自身的局部信息,提高了系統的可靠性。最后利用Matlab/Simulink搭建了含雙蓄電池組的光儲直流微網模型,對本文所提出的方法進行了仿真驗證。
1 環流及SoC不平衡問題
光儲直流微網拓撲結構如圖1所示。由圖1可知,拓撲結構由光伏發電模塊、蓄電池、負載和DC-DC變換器組成。兩個蓄電池和光伏發電模塊分別并聯到直流母線,為負載提供電力。光伏發電模塊輸出功率根據光照強度和溫度變化,當光伏發電模塊輸出功率高于負載功率需求時,母線電壓會升高;反之母線電壓會降低。母線電壓高于額定電壓時蓄電池進行充電,母線電壓低于額定電壓時蓄電池進行放電,這樣既可以保證母線電壓穩定,也可以保證各個蓄電池同時充放電。
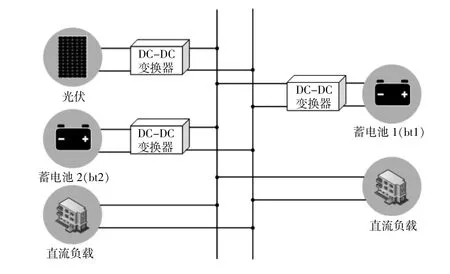
圖1 光儲直流微網拓撲結構Fig.1 Structure of optical storage DC microgrid topology
在微電網中多個蓄電池可以為電網帶來更高的穩定性,但是也出現了蓄電池SoC不平衡問題。對于微電網中蓄電池之間的SoC出現不平衡的原因,本文對其進行量化分析,以兩個并聯蓄電池同時放電為例,雙蓄電池并聯拓撲結構如圖2所示。
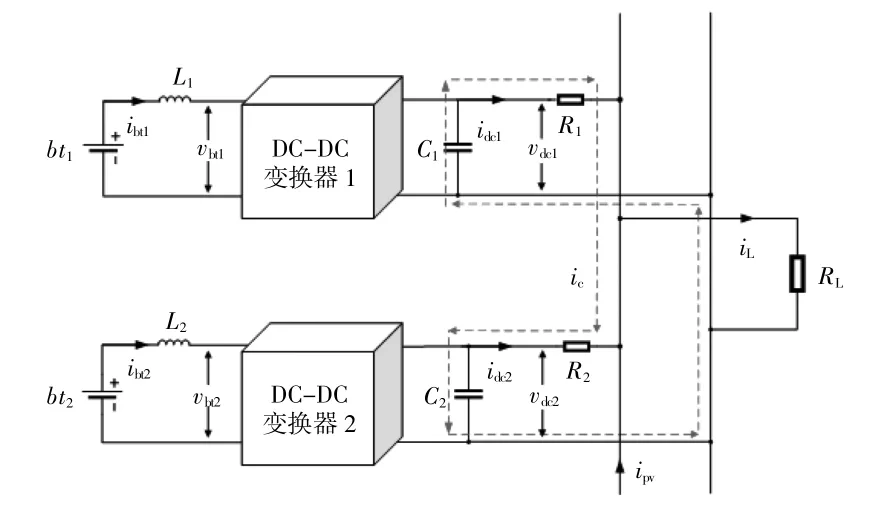
圖2 雙蓄電池并聯拓撲結構Fig.2 Dual battery parallel topology
圖中:vdc1,vdc2,idc1,idc2,R1和R2分別為變換器1,2的輸出電壓、輸出電流和線路電阻;vbt1,vbt2,ibt1,ibt2分別為蓄電池1,2的輸出電壓和輸出電流;RL為負載;iL為流過負載的電流;ipv為光伏發電模塊輸出電流;ic為變換器1至變換器2的環流;C1,C2,L1,L2分別為濾波電容和電感。
由基爾霍夫電壓定律(KVL)可得:
可見,當線路電阻R1≠R2時,環流ic≠0。
由于R1R2<<RL,所以R1R2可忽略不計,得:
式(5),(6)明確表示了idc1,idc2中所包含的環流分量。
因為變換器的功率損耗相較于光伏發電模塊功率和蓄電池功率非常小,可忽略不計,所以根據變換器兩端功率相等可得:
其中j=1,2,根據庫侖定律,蓄電池SoC的表達式為
式中:SoCj,t=0為第j個蓄電池的初始SoC值;Cbtj為第j個蓄電池的額定容量。
由式(1)~(8)可知,線路電阻不相等會引起ibtj不相等,從而導致蓄電池SoC不平衡,并且實現了對每個蓄電池SoC的量化計算。圖3為雙蓄電池SoC對比圖。其中兩個相同規格的蓄電池初始SoC均為55%,線路電阻分別為0.5,1 Ω。
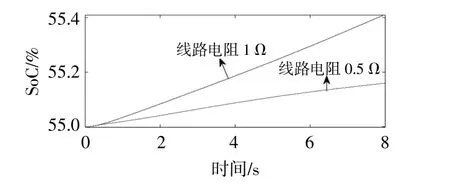
圖3 雙蓄電池SoC對比Fig.3 Comparison of SoC of two batteries
由圖3可知,從0時刻開始充電,在8 s時蓄電池SoC分別為55.16%和55.41%,表明了線路電阻不同會導致蓄電池SoC不平衡。
2 改進的自適應下垂控制
圖4為蓄電池自適應下垂控制原理圖。圖中包括比例積分(PI)反饋控制和下垂控制兩個環節。下垂控制環節計算出參考電壓vref提供給PI反饋控制環節,PI反饋控制部分主要是為了實現精確的電壓跟蹤,其中包括電壓外環和電流內環。電壓外環包含一個PI控制器,可使儲能單元輸入輸出電壓vdc快速地跟蹤其參考值vref。電流內環包含一個PI控制器,用來增加系統的阻尼,使系統更加穩定并且防止電池充放電時電流波動過大。

圖4 蓄電池自適應下垂控制原理圖Fig.4 Schematic diagram of battery adaptive droop control
本文所提出的改進自適應下垂控制分為環流抑制和平衡SoC兩個環節,不僅可以實現抑制蓄電池之間的環流和雙蓄電池SoC不平衡,而且可通過設置自適應下垂系數解決輕負載情況下環流變大的問題。儲能單元主要由蓄電池和雙向buck-boost變換器組成。
改進自適應下垂控制表達式為
式中:v*為直流母線電壓額定值;kj為環流抑制環節的自適應下垂系數;qj為平衡SoC環節的自適應下垂系數。
2.1 環流抑制
圖5為輕負載和額定負載應用傳統下垂控制(下垂系數為固定值)方法下兩個蓄電池的電流偏差,其中,輕負載的電流偏差為Δi′,額定負載的電流偏差為Δi。
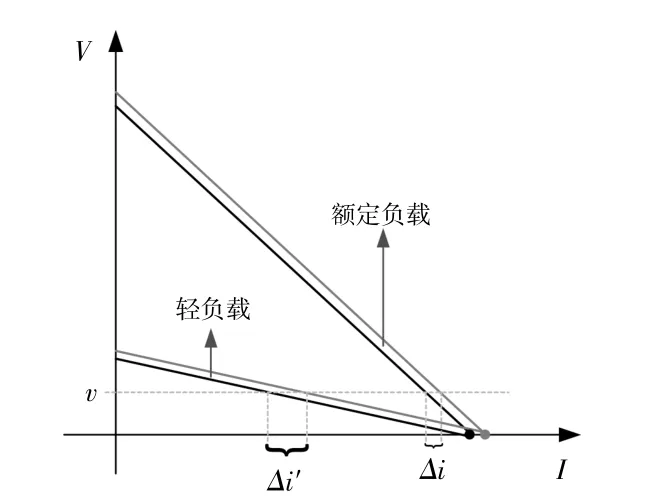
圖5 傳統下垂控制下不同負載的電流偏差比較Fig.5 Comparison diagram of current deviation of different loads under traditional droop control
由圖5可知,Δi′>Δi,表明傳統下垂控制在輕負載條件下對環流的抑制能力不足[10]。由于輕負載功率消耗比正常負載低,母線電壓會隨之上升[10]。為了改善傳統下垂控制的缺點,本文根據vdcj的上升幅值實時調節下垂系數,kj設計如下:
其中m為正實數,當vdcj>vH時,vdcj處于高壓區,此時m=1;當vdcj≤vH時,m=0。vdcj不允許超過額定電壓的±5%[12],vmax,vmin分別為vdcj的最大值和最小值;imax,-imax分別為idcj的最大值和最小值,代表第j個蓄電池單元的最大放電電流和最大充電電流。圖4中的環流抑制是本文的自適應下垂曲線,第一象限代表放電,第二象限代表充電;輕負載時將導致母線電壓升高,vdcj>vH,此時kj開始實時調節。
圖6為下垂控制曲線的第二象限,給出了改進與傳統下垂控制的電流偏差比較。實線是本文提出的下垂控制曲線,虛線是傳統下垂控制曲線。
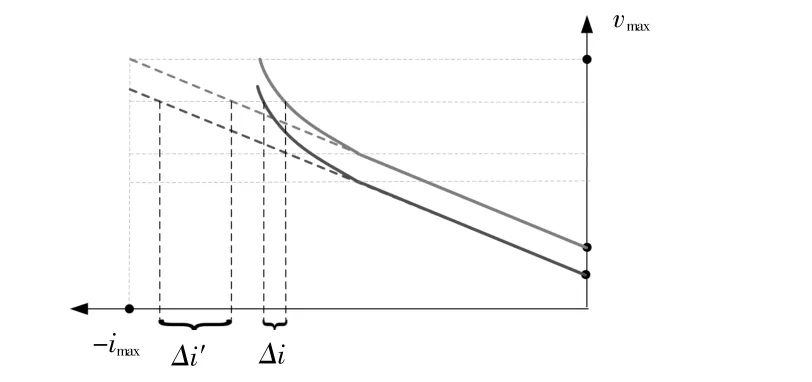
圖6 改進與傳統下垂控制的電流偏差比較Fig.6 Comparison of current deviation between improved and traditional droop control
由圖6可知,輕負載情況下,改進下垂控制電流差值Δi明顯小于傳統下垂控制的電流差值Δi′。
2.2 平衡雙蓄電池SoC
平衡雙蓄電池SoC下垂系數qj根據SoCj進行自適應調整,每個蓄電池的輸出電流與蓄電池SoC成正比,輸入電流與蓄電池SoC成反比。
充電時,SoCj越高,輸入電流(絕對值)越低,SoCj越低,輸入電流(絕對值)越高;在放電時,SoCj越高,輸出電流越高,SoCj越低,輸出電流越低,從而使蓄電池SoC平衡。
圖4平衡SoC部分中,第四象限代表放電,第二象限代表充電,其中SoC1>SoC2;當充電時,q1>q2,所以|ic2|>|ic1|;當放電時,q2>q1,所以|id1|>|id2|。
式(12)中n為正整數,n越大,SoC平衡速度越快,但是變換器的輸出功率隨n的增加而增加,為了避免超過變換器的額定功率,取n=3。kc和kd的取值范圍為
母線電壓的額定值為1 200 V,允許波動的范圍是5%,即Δvdcmax=60 V,Δvdcmin=-60 V;imax=100 A,i-max=-100 A。SoC為20%~80%。
為了體現本文平衡雙蓄電池SoC方法的優越性,與傳統平衡SoC方法[9]進行比較。
其中參數A為常數。通過比較式(9)與式(14),本文所提方法中參數qj為虛擬阻抗,其表達式見式(12),根據充放電狀態而有差異。為了便于比較,式(9)與式(14)虛擬阻抗kj取值相同。因此,改進的平衡雙蓄電池SoC方法相當于加大了下垂系數,可以更好地抑制環流;而傳統平衡SoC方法由于A與kj符號相反,且不是虛擬阻抗,所以不能參與抑制環流。
3 仿真驗證
為了驗證本文所提方法的有效性,采用Matlab/Simulink軟件分別對額定負載和輕負載兩種情形進行仿真分析。
仿真參數如下:采用1Soltech 1STH-215-P型號光伏發電模塊,在光照強度為1 000 W/m2且溫度為25℃時達到最大輸出功率,最大輸出功率為120 kW,開路電壓為871.2 V,短路電流為188.16 A,兩組蓄電池的容量為10 Ah,端電壓為500 V,初始SoC1,t=0=60%和SoC2,t=0=55%,SoC正常工作值為20%~80%;線路電阻分別為R1=0.5 Ω,R2=1 Ω;額定負載RL消耗功率為60 kW,母線電壓額定值v*=1 200 V,vH=1 230 V,母線電壓允許波動值為額定值的±5%;電感Lj=1 mH,電容Cj=1 mF,PI控制器P=0.1,I=0.2,PWM載波頻率為2 kHz;下垂控制中參數kc=1.17,kd=0.1,當h=1時kj=0.6。傳統下垂控制中下垂系數為固定值0.6;傳統平衡SoC方法中A=60。圖7為額定負載時的仿真結果。
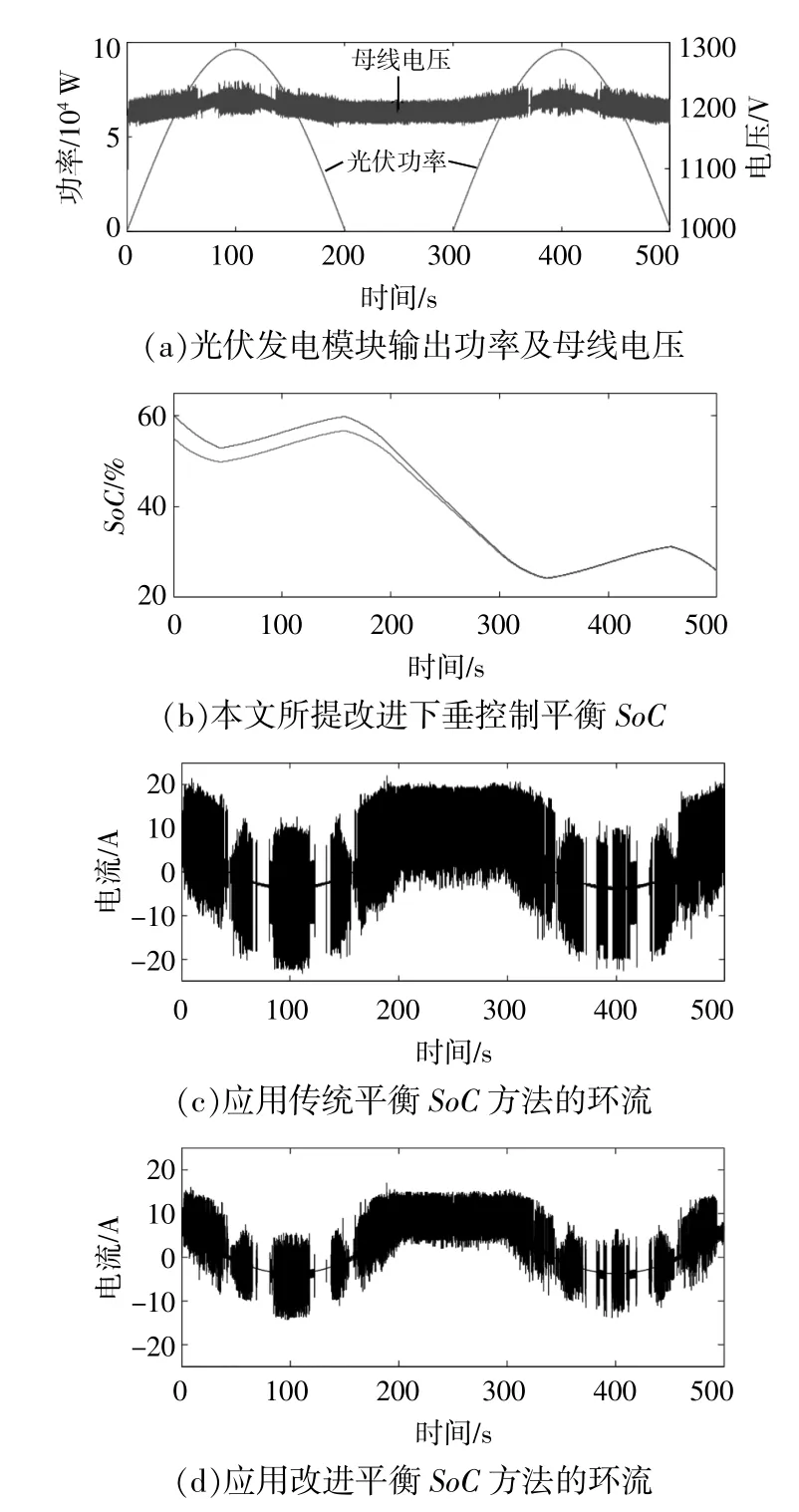
圖7 額定負載時的仿真結果Fig.7 Simulation results at rated load
由圖7可知,光伏發電模塊處于MPPT模式,輸出功率隨著光照強度變化。0~200 s光伏輸出功率由低變高再變低;200~300 s光伏輸出功率為0;300~500 s再次進入白天。當光伏輸出功率大于負載功率60 kW時,母線電壓上升,當光伏輸出功率小于負載功率60 kW時,母線電壓下降;當母線電壓高于1 200 V時蓄電池充電,反之蓄電池放電。由此可見,母線電壓可以很好地穩定在額定值1 200 V附近,電壓波動范圍為3%以內,最大值是1 227 V,最小值是1 171 V。圖7(b)是應用本文提出控制方法的雙蓄電池SoC變化情況,兩個蓄電池初始SoC分別為60%和55%,雙蓄電池隨著母線電壓的變化進行充放電,約260 s后蓄電池之間的SoC達到平衡狀態。改進平衡SoC方法的環流更小,其均方差值是5.219,傳統方法的環流均方差值是5.582,環流減小了7%。因此,本文所提改進平衡SoC方法環流抑制效果更好。
為了體現輕負載情況下本文方法的優越性,將負載消耗功率設定為30 kW進行仿真驗證。圖8為輕負載時應用傳統下垂控制方法以及本文提出方法雙蓄電池之間的環流。
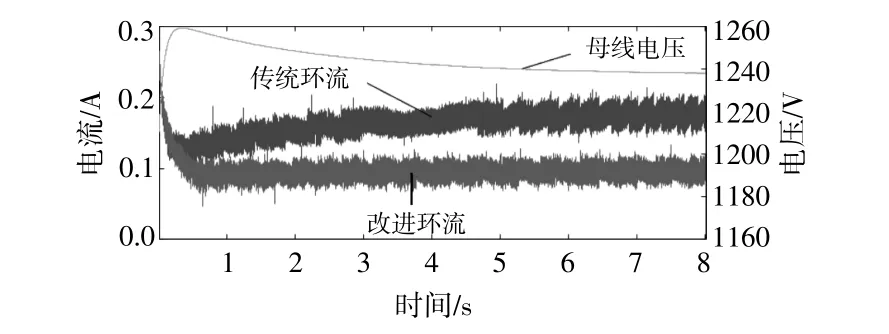
圖8 輕負載時的環流比較Fig.8 Comparison of circulating currents under light load
由圖8可知,光伏發電模塊輸出功率大于直流負載消耗功率,導致母線電壓高于1 230 V,仿真時長內母線電壓均大于vH,處于高壓區。本文所提下垂控制的下垂系數kj根據母線電壓實時調整,環流均方差為0.098,而傳統下垂控制的環流均方差為0.164。
4 結論
本文分析了由線路電阻不相等所引起的環流和SoC不平衡的問題,并提出一種改進的下垂控制方法,其中環流抑制環節的自適應下垂系數根據母線電壓實時調整,平衡SoC環節的自適應下垂系數根據蓄電池荷電狀態實時調整。仿真驗證了本文所設計的蓄電池充放電邏輯可以有效地穩定母線電壓,解決環流和SoC不平衡問題,與傳統方法環流抑制環節相比,本文控制方法在輕負載條件下有良好效果,能夠有效抑制雙蓄電池間的環流。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
