一種復(fù)雜曲面無基準(zhǔn)輪廓度的ER-BFGS評(píng)定方法
2023-11-27 15:36:14付高財(cái)盛步云萬潤(rùn)殷希彥盛甘霖
中國(guó)機(jī)械工程 2023年8期
付高財(cái) 盛步云 萬潤(rùn) 殷希彥 盛甘霖
摘要:針對(duì)大量測(cè)點(diǎn)導(dǎo)致曲面輪廓度計(jì)算耗時(shí)倍增的問題,提出一種基于熵正則化和BFGS算法的曲面輪廓度評(píng)定方法。該方法在點(diǎn)到曲面的最小距離函數(shù)的基礎(chǔ)上,通過熵正則化原理將輪廓度最小區(qū)域評(píng)定模型的極大極小問題轉(zhuǎn)化為無約束可微優(yōu)化問題,并利用快速收斂的BFGS算法進(jìn)行求解,實(shí)現(xiàn)了復(fù)雜曲面無基準(zhǔn)輪廓度的快速評(píng)定。實(shí)驗(yàn)表明該方法在計(jì)算耗時(shí)方面比序列二次規(guī)劃方法縮短約5%~19%,能有效提高在機(jī)測(cè)量效率。
關(guān)鍵詞:在機(jī)測(cè)量;熵正則化;BFGS算法;面輪廓度
中圖分類號(hào):TH161
DOI:10.3969/j.issn.1004-132X.2023.08.006
An ER-BFGS Evaluation Method for Datum-free Profile of Complex Surfaces
FU Gaocai1 SHENG Buyun1,2 WAN Run3 YIN Xiyan2 SHENG Ganlin4
Abstract: To solve the problem that a large number of measurement points caused the multiplication of time spent in calculating surface profiles, a new surface profile evaluation method was proposed based on ER and BFGS algorithm. Based on the minimum distance function from point to surface, the minimax problem of the profile evaluation model for the minimum region was transformed into an unconstrained and differentiable optimization problem through ER principle, and solved by the fast convergent BFGS algorithm, which realized the rapid profile evaluation of complex surfaces without datum. The experiments show that the calculation time of this method may decrease as 5%~19% compared with the sequential quadratic programming method, and effectively improve the efficiency of on-line measurement.
Key words: on-line measurement; entropy regularization(ER); BFGS(Broyden-Fletcher-Goldfarb-Shanno)algorithm; surface profile
0 引言
隨著CAD造型技術(shù)的發(fā)展,幾何特性優(yōu)越的自由曲面已成為工程上復(fù)雜且常用的特征,而評(píng)判零件曲面質(zhì)量是否合格的重要依據(jù)是曲面輪廓度是否達(dá)到設(shè)計(jì)的公差要求。依托在機(jī)測(cè)量技術(shù)[1],這些曲面加工完成后直接在機(jī)床上進(jìn)行質(zhì)量檢驗(yàn),避免了工件搬運(yùn)、二次裝夾帶來的耗時(shí)費(fèi)力、二次定位誤差等問題。整個(gè)在機(jī)測(cè)量中的測(cè)點(diǎn)規(guī)劃、測(cè)量執(zhí)行、結(jié)果計(jì)算等過程不能過多占用機(jī)床的運(yùn)行時(shí)間,否則會(huì)影響機(jī)床的加工利用效率[2]。
曲面輪廓度評(píng)定方法主要分為最小二乘法和最小區(qū)域法兩大類。最小二乘法[3]雖然原理簡(jiǎn)單、工程上易實(shí)現(xiàn),但不滿足ISO標(biāo)準(zhǔn)對(duì)最小包容區(qū)域的要求。最小區(qū)域法完全基于ISO標(biāo)準(zhǔn)的最小條件原則,在無基準(zhǔn)曲面輪廓度求解算法中的應(yīng)用最為廣泛[4]。LANG等[5]在測(cè)點(diǎn)到模型表面的距離函數(shù)基礎(chǔ)上,建立了基于最小區(qū)域準(zhǔn)則的最優(yōu)定位模型,并利用序列二次規(guī)劃(sequential quadratic programming,SQP)方法求解出自由曲面的輪廓誤差。ZHANG等[6]引入輔助變量,將不可微極小極大優(yōu)化問題轉(zhuǎn)化為帶約束的可微優(yōu)化問題,并基于原對(duì)偶內(nèi)點(diǎn)法進(jìn)行最小區(qū)域擬合來求解NURBS曲面的輪廓誤差。LIU等[7]提出了一種基于線性四叉樹的表面輪廓誤差粗定位和精確配準(zhǔn)算法。ZHANG等[8]借助指數(shù)懲罰函數(shù)將定位模型優(yōu)化問題變換為無約束可微最小化問題,采用主動(dòng)集策略和參數(shù)自適應(yīng)調(diào)整的牛頓法計(jì)算出輪廓度。TAN等[9]在定位迭代優(yōu)化過程中引入動(dòng)態(tài)加權(quán)策略,采用一種效率高于四元數(shù)方法的差分定位算法來快速求解定位的剛性變換參數(shù)。為求解符合最小區(qū)域要求的輪廓度評(píng)定模型,遺傳算法(genetic algorithm,GA)[10]、粒子群優(yōu)化(particle swarm optimization,PSO)算法[11]、蝙蝠算法[12]和差分進(jìn)化算法[13]等智能優(yōu)化算法也在曲面定位參數(shù)的求解上有所應(yīng)用。
雖然SQP、高斯-牛頓等微分方法能有效計(jì)算出測(cè)點(diǎn)的最優(yōu)定位參數(shù),但通常都需要引入一些與測(cè)點(diǎn)數(shù)量相同的額外約束不等式,將評(píng)定模型簡(jiǎn)化為某類可微優(yōu)化問題。因此,對(duì)于復(fù)雜曲面的精密在機(jī)測(cè)量場(chǎng)景,測(cè)點(diǎn)較多時(shí),算法的復(fù)雜性將增大,導(dǎo)致測(cè)量過程占用大量的機(jī)床運(yùn)行時(shí)間,與在機(jī)測(cè)量技術(shù)的初衷相悖。此外GA、PSO等經(jīng)典智能算法容易陷入局部最優(yōu),難以滿足精密測(cè)量的需求,且在測(cè)量復(fù)雜曲面時(shí)收斂過慢。
本文針對(duì)測(cè)點(diǎn)較多的復(fù)雜曲面,為避免不可微目標(biāo)函數(shù)而導(dǎo)致復(fù)雜算法的問題,采用熵正則化原理將評(píng)定模型的極大極小問題變換為無約束可微優(yōu)化問題,并通過BFGS(Broyden-Fletcher-Goldfarb-Shanno)算法快速求解出測(cè)點(diǎn)定位參數(shù)。
1 輪廓度模型的描述
國(guó)家標(biāo)準(zhǔn)GB/T 1182—2018《產(chǎn)品幾何技術(shù)規(guī)范(GPS)幾何公差形狀、方向、位置和跳動(dòng)公差標(biāo)注》指出,無基準(zhǔn)要求的面輪廓度公差帶是包絡(luò)一系列圓球(諸球的直徑為公差T且球心位于理論曲面上)的兩包絡(luò)面之間區(qū)域,如圖1所示。面輪廓度評(píng)定過程就是不斷調(diào)整實(shí)際測(cè)點(diǎn)相對(duì)于理論曲面的空間位姿,保證誤差帶最小。
國(guó)家標(biāo)準(zhǔn)GB/T 1958—2017《產(chǎn)品幾何量技術(shù)規(guī)范(GPS)形狀和位置公差檢測(cè)規(guī)定》中,形狀誤差評(píng)定的最小區(qū)域準(zhǔn)則為:被測(cè)要素的提取要素相對(duì)于理想要素的最大距離為最小。則輪廓度誤差的最小區(qū)域直徑為實(shí)際測(cè)點(diǎn)距離理想曲面最大值的2倍,數(shù)學(xué)上可定義為極小極大問題:
式中,n為測(cè)點(diǎn)數(shù)量;di(R,T)為實(shí)際測(cè)點(diǎn)到理論曲面的距離;R、T分別為測(cè)點(diǎn)集不斷調(diào)整位姿過程中所需要進(jìn)行的旋轉(zhuǎn)變換矩陣和剛性平移矩陣;(α,β,γ)、(δx,δy,δz)分別為測(cè)點(diǎn)集在理論曲面坐標(biāo)系中的旋轉(zhuǎn)量和平移量。
由式(1)可知,評(píng)定曲面輪廓度誤差是一個(gè)多元非線性的復(fù)雜尋優(yōu)過程,需要解決兩個(gè)關(guān)鍵問題:計(jì)算測(cè)點(diǎn)到理論曲面的最小距離;求解測(cè)點(diǎn)集平移、旋轉(zhuǎn)的最優(yōu)變換參數(shù)。
當(dāng)曲面復(fù)雜的測(cè)點(diǎn)數(shù)量較多時(shí),不可微函數(shù)的迭代計(jì)算量大,因此充分利用熵正則化解決大型數(shù)據(jù)集最優(yōu)傳輸?shù)膬?yōu)勢(shì),結(jié)合BFGS算法設(shè)計(jì)了一種求解復(fù)雜曲面輪廓度的方法。首先利用分割逼近法確定測(cè)點(diǎn)到理論曲面的最小距離,通過熵正則化方法將評(píng)定模型中的極大極小問題轉(zhuǎn)化為含參數(shù)的無約束可微優(yōu)化問題,然后利用BFGS算法快速求解出測(cè)點(diǎn)集的最優(yōu)變換參數(shù)。具體的評(píng)定流程如圖2所示。
2 測(cè)點(diǎn)到曲面的最小距離
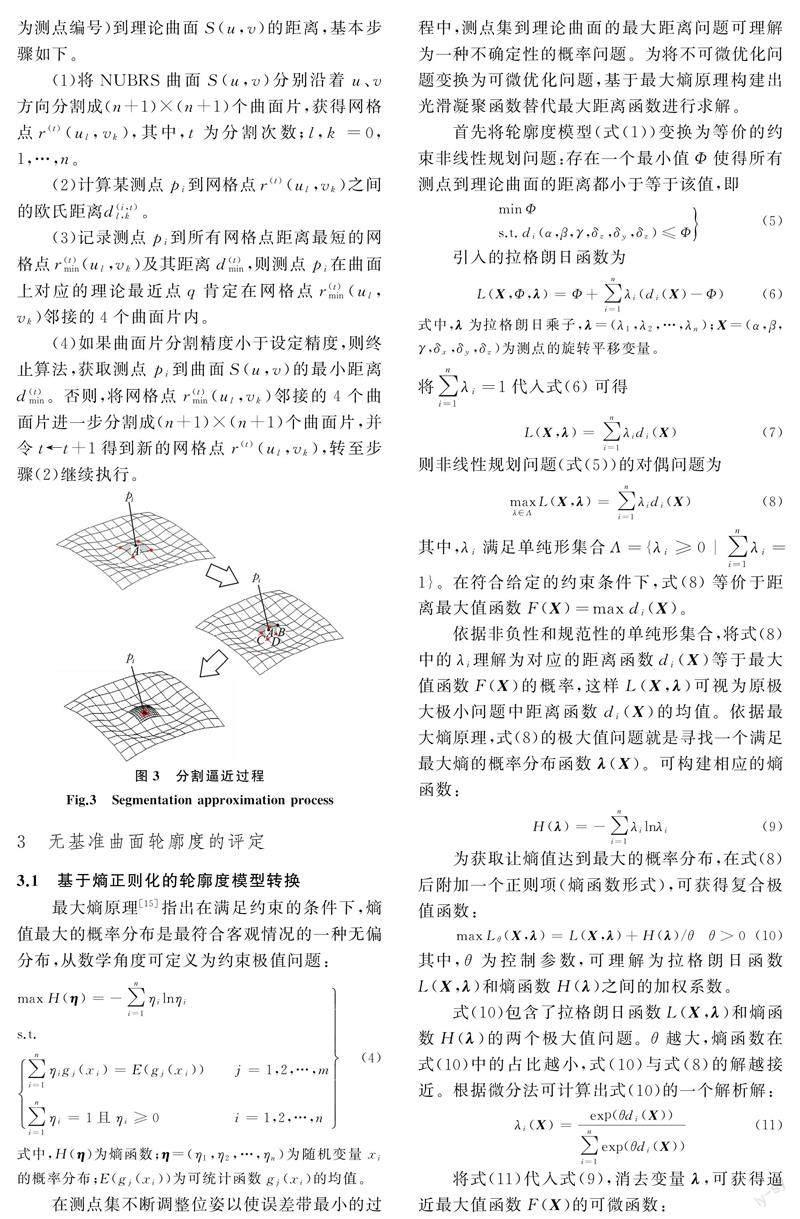
根據(jù)分割逼近方法[14](圖3),計(jì)算測(cè)點(diǎn)pi(i為測(cè)點(diǎn)編號(hào))到理論曲面S(u,v)的距離,基本步驟如下。
(1)將NUBRS曲面S(u,v)分別沿著u、v方向分割成(n+1)×(n+1)個(gè)曲面片,獲得網(wǎng)格點(diǎn)r(t)(ul,vk),其中,t為分割次數(shù);l,k =0,1,…,n。
(2)計(jì)算某測(cè)點(diǎn)pi到網(wǎng)格點(diǎn)r(t)(ul,vk)之間的歐氏距離d(i,t)l,k。
(3)記錄測(cè)點(diǎn)pi到所有網(wǎng)格點(diǎn)距離最短的網(wǎng)格點(diǎn)r(t)min(ul,vk)及其距離d(t)min,則測(cè)點(diǎn)pi在曲面上對(duì)應(yīng)的理論最近點(diǎn)q肯定在網(wǎng)格點(diǎn)r(t)min(ul,vk)鄰接的4個(gè)曲面片內(nèi)。
(4)如果曲面片分割精度小于設(shè)定精度,則終止算法,獲取測(cè)點(diǎn)pi到曲面S(u,v)的最小距離d(t)min。否則,將網(wǎng)格點(diǎn)r(t)min(ul,vk)鄰接的4個(gè)曲面片進(jìn)一步分割成(n+1)×(n+1)個(gè)曲面片,并令t←t+1得到新的網(wǎng)格點(diǎn)r(t)(ul,vk),轉(zhuǎn)至步驟(2)繼續(xù)執(zhí)行。
3 無基準(zhǔn)曲面輪廓度的評(píng)定
3.1 基于熵正則化的輪廓度模型轉(zhuǎn)換
最大熵原理[15]指出在滿足約束的條件下,熵值最大的概率分布是最符合客觀情況的一種無偏分布,從數(shù)學(xué)角度可定義為約束極值問題:
式中,H(η)為熵函數(shù);η=(η1,η2,…,ηn)為隨機(jī)變量xi的概率分布;E(gj(xi))為可統(tǒng)計(jì)函數(shù)gj(xi)的均值。
在測(cè)點(diǎn)集不斷調(diào)整位姿以使誤差帶最小的過程中,測(cè)點(diǎn)集到理論曲面的最大距離問題可理解為一種不確定性的概率問題。為將不可微優(yōu)化問題變換為可微優(yōu)化問題,基于最大熵原理構(gòu)建出光滑凝聚函數(shù)替代最大距離函數(shù)進(jìn)行求解。
首先將輪廓度模型(式(1))變換為等價(jià)的約束非線性規(guī)劃問題:存在一個(gè)最小值Φ使得所有測(cè)點(diǎn)到理論曲面的距離都小于等于該值,即
其中,λi滿足單純形集合Λ={λi≥0|∑ni=1λi=1}。在符合給定的約束條件下,式(8)等價(jià)于距離最大值函數(shù)F(X)=maxdi(X)。
依據(jù)非負(fù)性和規(guī)范性的單純形集合,將式(8)中的λi理解為對(duì)應(yīng)的距離函數(shù)di(X)等于最大值函數(shù)F(X)的概率,這樣L(X,λ)可視為原極大極小問題中距離函數(shù)di(X)的均值。依據(jù)最大熵原理,式(8)的極大值問題就是尋找一個(gè)滿足最大熵的概率分布函數(shù)λ(X)。可構(gòu)建相應(yīng)的熵函數(shù):
首先輸入理論曲面和測(cè)點(diǎn)(仿真或?qū)嶋H),根據(jù)第2節(jié)的分割逼近方法求解測(cè)點(diǎn)到曲面的距離,然后采用不同的方法迭代求解測(cè)點(diǎn)的最佳定位參數(shù),獲得曲面輪廓度,最后將其與蔡司三坐標(biāo)儀器的實(shí)際測(cè)量結(jié)果進(jìn)行對(duì)比以驗(yàn)證方法的有效性。所有實(shí)驗(yàn)數(shù)據(jù)均在CPU i5-4210M的個(gè)人計(jì)算機(jī)上進(jìn)行,軟件平臺(tái)為MATLAB R2018a。
4.1 仿真實(shí)驗(yàn)
在曲面上以Halton序列隨機(jī)生成400個(gè)理論測(cè)點(diǎn)。同時(shí)假定曲面在加工過程中的系統(tǒng)誤差ems=0.05(sinx+75120+siny-75120),隨機(jī)誤差emr符合正態(tài)分布N(0,0.012);在測(cè)量過程中的系統(tǒng)誤差eis=(1,-1.5,0.8,0.1,-0.06,0.05),隨機(jī)誤差eir符合正態(tài)分布N(0,0.0052)。考慮上述模擬的加工誤差和測(cè)量誤差,將400個(gè)理論測(cè)點(diǎn)變換為仿真測(cè)點(diǎn)進(jìn)行實(shí)驗(yàn)。
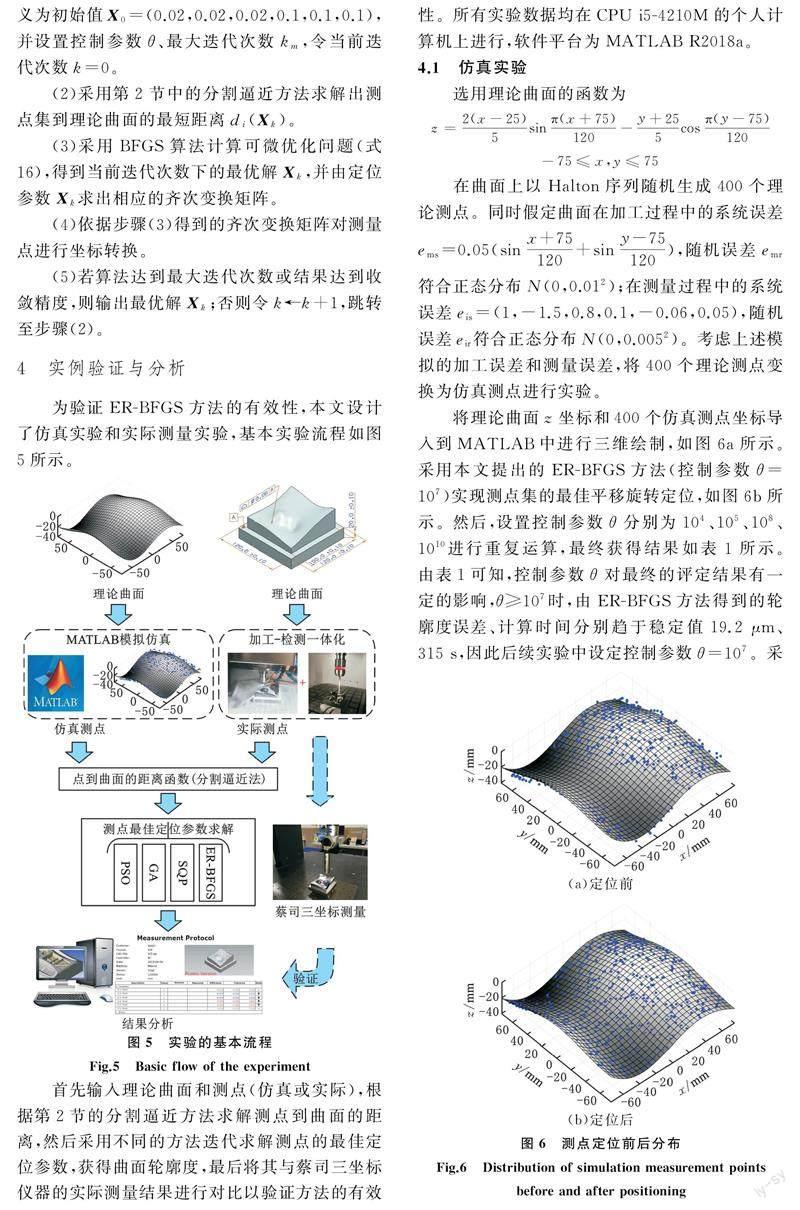
將理論曲面z坐標(biāo)和400個(gè)仿真測(cè)點(diǎn)坐標(biāo)導(dǎo)入到MATLAB中進(jìn)行三維繪制,如圖6a所示。采用本文提出的ER-BFGS方法(控制參數(shù)θ=107)實(shí)現(xiàn)測(cè)點(diǎn)集的最佳平移旋轉(zhuǎn)定位,如圖6b所示。然后,設(shè)置控制參數(shù)θ分別為104、105、108、1010進(jìn)行重復(fù)運(yùn)算,最終獲得結(jié)果如表1所示。由表1可知,控制參數(shù)θ對(duì)最終的評(píng)定結(jié)果有一定的影響,θ≥107時(shí),由ER-BFGS方法得到的輪廓度誤差、計(jì)算時(shí)間分別趨于穩(wěn)定值19.2 μm、315 s,因此后續(xù)實(shí)驗(yàn)中設(shè)定控制參數(shù)θ=107。采用PSO算法[17]、GA[14]、
SQP方法[5]以及ER-BFGS方法對(duì)曲面輪廓度進(jìn)行評(píng)定,結(jié)果如表2所示。其中,各算法的最大迭代次數(shù)為500,終止收斂誤差為10-7。其他參數(shù)參照原文獻(xiàn)設(shè)置,GA的種群規(guī)模為50,交叉概率為0.8,變異概率為0.02;PSO的種群規(guī)模為30,學(xué)習(xí)因子c1=c2=2,慣性因子w=1。從表2中可以看出,PSO得到的輪廓度誤差精度最低,很可能陷入了局部最優(yōu);GA、SQP、ER-BFGS的輪廓度結(jié)果相近,但GA耗時(shí)最長(zhǎng),ER-BFGS在迭代次數(shù)與耗時(shí)方面要略優(yōu)于SQP。
為探索本文方法在測(cè)點(diǎn)較多時(shí)的計(jì)算優(yōu)勢(shì),僅改變測(cè)點(diǎn)數(shù)量,按測(cè)點(diǎn)數(shù)400時(shí)的模擬方式生成仿真測(cè)點(diǎn),并保證各方法參數(shù)、步驟一致,完成輪廓度評(píng)定。以Halton隨機(jī)分布方式,測(cè)點(diǎn)數(shù)量N分別取100、200、300、500、600,重復(fù)各上述方法的評(píng)定過程,客觀統(tǒng)計(jì)輪廓度結(jié)果和計(jì)算耗時(shí)如圖7所示。
由圖7可以看出,N為400,600時(shí),PSO、GA的輪廓度精度分別19.4 μm、23.3 μm,與其他方法的輪廓度相差較大,說明沒能求解出最佳輪廓度,出現(xiàn)了局部最優(yōu)問題。測(cè)點(diǎn)數(shù)量不同時(shí),本文方法始終與SQP的輪廓度評(píng)定結(jié)果相近,基本能保證求解精度,但本文方法在計(jì)算耗時(shí)方面優(yōu)于SQP,N為100、200、300、400、500、600的計(jì)算耗時(shí)相對(duì)于
SQP方法依次縮短了5.4%、8.2%、10.2%、14.9%、16.9%、19.5%。綜上所述,PSO、GA等群體智能算法的耗時(shí)普遍較長(zhǎng),且可能陷入局部最優(yōu),導(dǎo)致輪廓度精度較差;本文方法與SQP的計(jì)算結(jié)果相近,但在耗時(shí)方面略優(yōu)于SQP,并且隨著測(cè)點(diǎn)的增多,計(jì)算效率的優(yōu)勢(shì)更明顯。
4.2 在機(jī)測(cè)量實(shí)驗(yàn)
為驗(yàn)證本文方法在實(shí)際測(cè)量過程中的可行性,設(shè)計(jì)一個(gè)100 mm×100 mm的NUBRS曲面,以均勻分布方式規(guī)劃14×14個(gè)測(cè)點(diǎn),如圖8所示。首先在MAKINO-V77三軸立式加工中心(重復(fù)定位精度為±1 μm)上對(duì)工件進(jìn)行粗精加工,然后直接調(diào)用機(jī)床上的BLUM TC60測(cè)頭(德國(guó)波龍公司生產(chǎn),重復(fù)精度為0.3 μm)。先對(duì)直徑29.9772 mm的標(biāo)準(zhǔn)球進(jìn)行標(biāo)定,通過標(biāo)定值修正相應(yīng)誤差以保證在機(jī)測(cè)量結(jié)果的有效性。最后,對(duì)該曲面按規(guī)劃好的采樣點(diǎn)進(jìn)行在機(jī)測(cè)量,以獲取測(cè)點(diǎn)的實(shí)際坐標(biāo)。同樣地,在蔡司CONTURA三坐標(biāo)測(cè)量機(jī)(測(cè)量精度為1.7+L/350 μm)上以圖8所示的測(cè)點(diǎn)分布方式進(jìn)行實(shí)際測(cè)量,并利用配套軟件Calypso計(jì)算其輪廓度。
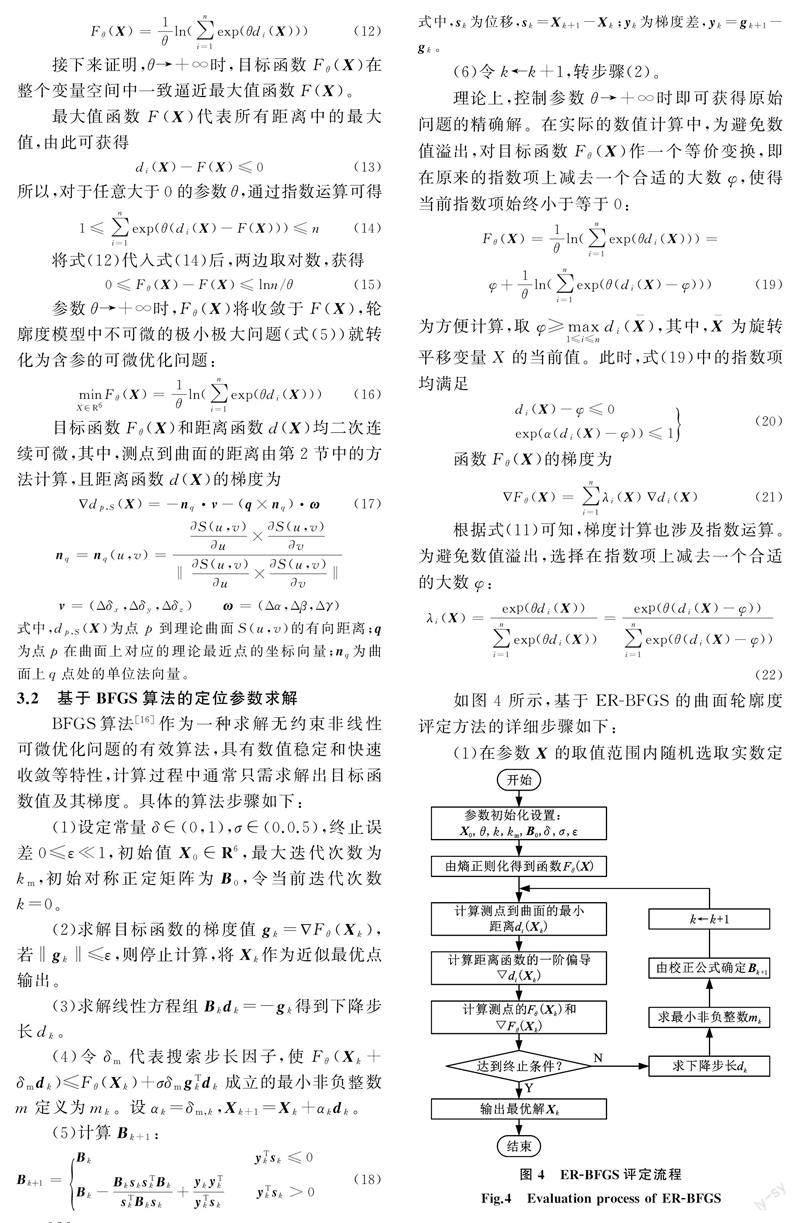
將設(shè)計(jì)曲面和實(shí)際測(cè)點(diǎn)數(shù)據(jù)導(dǎo)入Geomagic Qualify軟件中,結(jié)果如圖9a所示,設(shè)置控制參數(shù)θ=107,采用ER-BFGS完成模型求解后,獲取重新定位的測(cè)點(diǎn)分布,如圖9b所示。同樣地,分別采用PSO、GA、SQP以及本文方法對(duì)該加工曲面進(jìn)行輪廓度評(píng)定。Calypso測(cè)量軟件的計(jì)算結(jié)果如表3所示,各方法的迭代收斂情況如圖10所示。
由圖10、表3可以看出,在實(shí)際的在機(jī)測(cè)量實(shí)驗(yàn)中,本文方法評(píng)定的輪廓度誤差為24.6 μm,與GA的24.9 μm、SQP的25.1 μm、PSO的24.4 μm大致相近,且與蔡司三坐標(biāo)軟件實(shí)際測(cè)量結(jié)果24.2 μm相近,說明本文方法的在機(jī)測(cè)量數(shù)據(jù)是有效的。本文方法耗時(shí)為205 s,相比于PSO的479 s、GA的504 s、SQP的227 s分別縮短了57.2%、59.3%和8.5%。4種方法均能完成實(shí)際加工曲面的輪廓度評(píng)定,但本文方法在迭代次數(shù)和計(jì)算耗時(shí)方面均優(yōu)于其他3種方法,說明在實(shí)際的在機(jī)測(cè)量環(huán)境下,本文方法在保證測(cè)量結(jié)果可信的前提下,確實(shí)能有效縮短測(cè)量過程占用機(jī)床的時(shí)間。
5 結(jié)語
復(fù)雜曲面的無基準(zhǔn)輪廓度評(píng)定需要解決兩個(gè)關(guān)鍵問題,一是計(jì)算測(cè)點(diǎn)到理論曲面的最短距離,二是求解建立的最小區(qū)域評(píng)定模型。針對(duì)問題一,本文采用的分割逼近方法能有效求解點(diǎn)到曲面的距離。針對(duì)問題二,采用熵正則化原理和BFGS(ER-BFGS)算法相結(jié)合的方法求解曲面的定位參數(shù),獲得曲面的輪廓度。實(shí)驗(yàn)結(jié)果表明:基于最小區(qū)域準(zhǔn)則的ER-BFGS方法能夠保證輪廓度評(píng)定結(jié)果的有效性,且計(jì)算效率高于SQP、GA等方法,測(cè)點(diǎn)較多時(shí)能有效縮短計(jì)算耗時(shí),適用于復(fù)雜曲面的精密在機(jī)測(cè)量場(chǎng)景。
參考文獻(xiàn):
[1]李文龍, 王剛, 田亞明, 等. 在機(jī)測(cè)量技術(shù)與工程應(yīng)用研究進(jìn)展[J]. 航空制造技術(shù), 2022, 65(5):14-35.
LI Wenlong, WANG Gang, TIAN Yaming, et al. Research Progress of On-machine Measurement Technology and Its Engineering Applications[J]. Aeronautical Manufacturing Technology, 2022, 65(5):14-35.
[2]GAO W, HAITJEMA H, FANG F Z, et al. On-machine and In-process Surface Metrology for Precision Manufacturing[J]. CIRP Annals, 2019, 68(2):843-866.
[3]宋紅滾, 劉國(guó)平, 劉建勝, 等. 基于點(diǎn)集拓?fù)鋵W(xué)渦旋曲面輪廓度誤差評(píng)定[J]. 現(xiàn)代制造工程, 2017(12):133-138.
SONG Honggun, LIU Guoping, LIU Jiansheng, et al. Evaluating of Surface Profile Error for Scroll Compressor Basedon Point Set Topology[J]. Modern Manufacturing Engineering, 2017(12):133-138.
[4]王宇春, 孫和義, 唐文彥, 等. 最小條件下一般二次曲面輪廓度誤差的評(píng)定[J]. 儀器儀表學(xué)報(bào), 2014, 35(8):1803-1809.
WANG Yuchun, SUN Heyi, TANG Wenyan, et al. Evaluating General Quadric Profile Error Based on Least Condition Principle[J]. Chinese Journal of Scientific Instrument, 2014, 35(8):1803-1809.
[5]LANG A, SONG Z, HE G, et al. Profile Error Evaluation of Free-form Surface Using Sequential Quadratic Programming Algorithm[J]. Precision Engineering, 2017, 47:344-352.
[6]ZHANG X, ZHANG H, HE X, et al. Fast Evaluation of Minimum Zone Form Errors of Freeform NURBS Surfaces[J]. Procedia CIRP, 2015, 27:23-28.
[7]LIU J. Calculation of Profile Error for Complex Surface[J]. Measurement, 2014, 48:183-186.
[8]ZHANG X, ZHANG H, HE X, et al. Chebyshev Fitting of Complex Surfaces for Precision Metrology[J]. Measurement, 2013, 46(9):3720-3724.
[9]TAN G, ZHANG L, LIU S, et al. A Fast and Differentiated Localization Method for Complex Surfaces Inspection[J]. International Journal of Precision Engineering and Manufacturing, 2015, 16(13):2631-2639.
[10]LU K, YU Y, PENG K, et al. Error Evaluation of Planar Curve Profile Based on an Improved Genetic Algorithm[C]∥2017 4th International Conference on Information Science and Control Engineering(ICISCE). Changsha, 2017:312-316.
[11]萬潤(rùn), 王琳, 盛步云. 基于改進(jìn)粒子群算法的自由曲面輪廓度評(píng)定[J]. 組合機(jī)床與自動(dòng)化加工技術(shù), 2021(10):10-13.
WAN Run, WANG Lin, SHENG Buyun. Freeform Surface Profile Evaluation Based on Improved Particle Swarm Optimization Algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(10):10-13.
[12]HUANG Z, WEI P, LI C, et al. Aero-engine Blade Profile Reconstruction Based on Adaptive Step Size Bat Algorithm and Visualization of Machining Error[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2020, 234(1):49-65.
[13]HE G, ZHANG M, SONG Z. Error Evaluation of Free-form Surface Based on Distance Function of Measured Point to Surface[J]. Computer-Aided Design, 2015, 65:11-17.
[14]廖平. 基于遺傳算法和分割逼近法精確計(jì)算復(fù)雜曲面輪廓度誤差[J]. 機(jī)械工程學(xué)報(bào), 2010, 46(10):1-7.
LIAO Ping. Calculating of Complex Surface Profile Error Based on Subdivision Approach Algorithm and Genetic Algorithm[J]. Journal of Mechanical Engineering, 2010, 46(10):1-7.
[15]方興華, 宋明順, 魯偉. 測(cè)量不確定度信息約束下的最大熵分布研究[J]. 系統(tǒng)科學(xué)與數(shù)學(xué), 2017, 37(12):2337-2346.
FANG Xinghua, SONG Mingshun, LU Wei. Research on Maximum Entropy Distribution under Measurement Uncertainty Constraints[J]. Journal of Systems Science and Mathematical Sciences, 2017, 37(12):2337-2346.
[16]袁志聰, 魯鐵定, 劉瑞. 一種基于BFGS修正的正態(tài)分布變換點(diǎn)云配準(zhǔn)方法[J]. 測(cè)繪通報(bào), 2020(10):38-42.
YUAN Zhicong, LU Tieding, LIU Rui. A Normal Distribution Transform Point Cloud Registration Method Based on BFGS Correction[J]. Bulletin of Surveying and Mapping, 2020(10):38-42.
[17]廖平. 基于粒子群算法和分割逼近法的復(fù)雜曲面輪廓度誤差計(jì)算[J]. 中國(guó)機(jī)械工程, 2010, 21(2):201-205.
LIAO Ping. Calculation of Complex Surface Profile Errors Based on Hybrid Particle Swarm Optimization Algorithm[J]. China Mechanical Engineering, 2010, 21(2):201-205.
(編輯 張 洋)
作者簡(jiǎn)介:
付高財(cái), 男, 1989年生, 實(shí)驗(yàn)員。研究方向?yàn)榫軠y(cè)量、數(shù)字制造。發(fā)表論文10余篇。E-mail:whutjdfgc@163. com。
盛步云(通信作者), 男, 1964年生, 教授、博士研究生導(dǎo)師。研究方向?yàn)閿?shù)字集成制造、智能工廠。發(fā)表論文120余篇。E-mail:shengby@whut. edu. cn。
收稿日期:2022-05-05
基金項(xiàng)目:湖北省科技重大項(xiàng)目(2021AAA007)