面向自主創新的移動機器人高階思維實踐教學
2023-12-04 06:41:54李慧平張守旭
高教學刊 2023年34期
牛 云,李慧平,張守旭
(西北工業大學,西安 710072)
按照《中國教育現代化2035》[1]的戰略部署和《機器人產業發展規劃(2016—2020 年)》[2]對我國機器人人才培養提出的具體要求,機器人實踐課程應更加注重激發學生興趣,同時安排具有一定難度和挑戰性的實踐內容,以解決工程實際問題為牽引,提升學生項目開發及技術創新能力[3]。
國內外機器人實驗教學設計與革新主要體現在實驗手段、教學法、教學組織形式等幾方面。美國的一項調查顯示,機器人教學普遍缺乏合適的實驗環境或場地以及低成本、靈活的實驗平臺[4],導致課容量不足,將高性能仿真、虛擬現實或遠程實驗室等方式融入機器人實踐與創新教學是當前美國各高校重點探索的教學研究方向之一[5-6]。俄羅斯高校將工業界的最新需求及技術引入機器人教學,同時引入機器人仿真環境以緩解實踐資金不足的問題[7]。德國、西班牙等國家的高校大力推廣融合CDIO 等教育理念的機器人課堂教學、實訓及創新實驗的教學法革新[8-9]。
在國內,各大高校也積極開展旨在提升機器人等專業學生培養質量的課程改革與研究工作。東北師范大學馬勛雕等[10]通過精細化的學習任務設計,構建旨在提升學習者高階能力的智慧課堂;王宏等[11]研究了面向深度學習的STEM 教育模型,促使學習者基于個人知識體系和深度加工信息,提高實踐操作能力和高階思維能力;哈爾濱工業大學張近民等[12]圍繞既有的機器人研發和實驗教學平臺,通過項目結合創新平臺開展機器人課程實踐教學改革,注重提升學生的實際工程問題解決能力。廈門大學林曉鷹等[13]運用TRIZ 創新流程,設計面向新品開發的自主實踐教學法,讓學生在“創造中學習”,取得了良好的效果。
綜上所述,借助新技術手段,整合資源,構建新型實驗教學法,激發學生通過高階思維進行自主探究實驗,是新形勢下機器人實踐教學的重要內涵,在國內外創新型課程體系設置中占有重要地位,需要深入研究。
本文充分利用網絡共享資源及物理仿真等信息化手段設計符合學生認知規律的開放性、多層次、由易到難的實驗進階項目;融合翻轉課堂和高階思維工程教育理念,研究面向工程問題的“項目驅動式”的實踐教學新模式,力求使學生在興趣的驅使下,通過自主實踐、深層次探討、評價與改進,培育工程素養,提高解決工程問題及自主創新的能力。
一 實踐課程體系與教學法改革
(一)基于認知規律的多層次實踐課程體系設計
本文將機器人實體、物理仿真引擎、數字仿真相結合,構建如圖1 所示的符合學生認知規律的機器人多層次實驗課程體系。引導學生從理論應用到創新實踐,循序漸進地獲得工程實踐高階思維訓練,進而提高解決復雜工程問題能力。
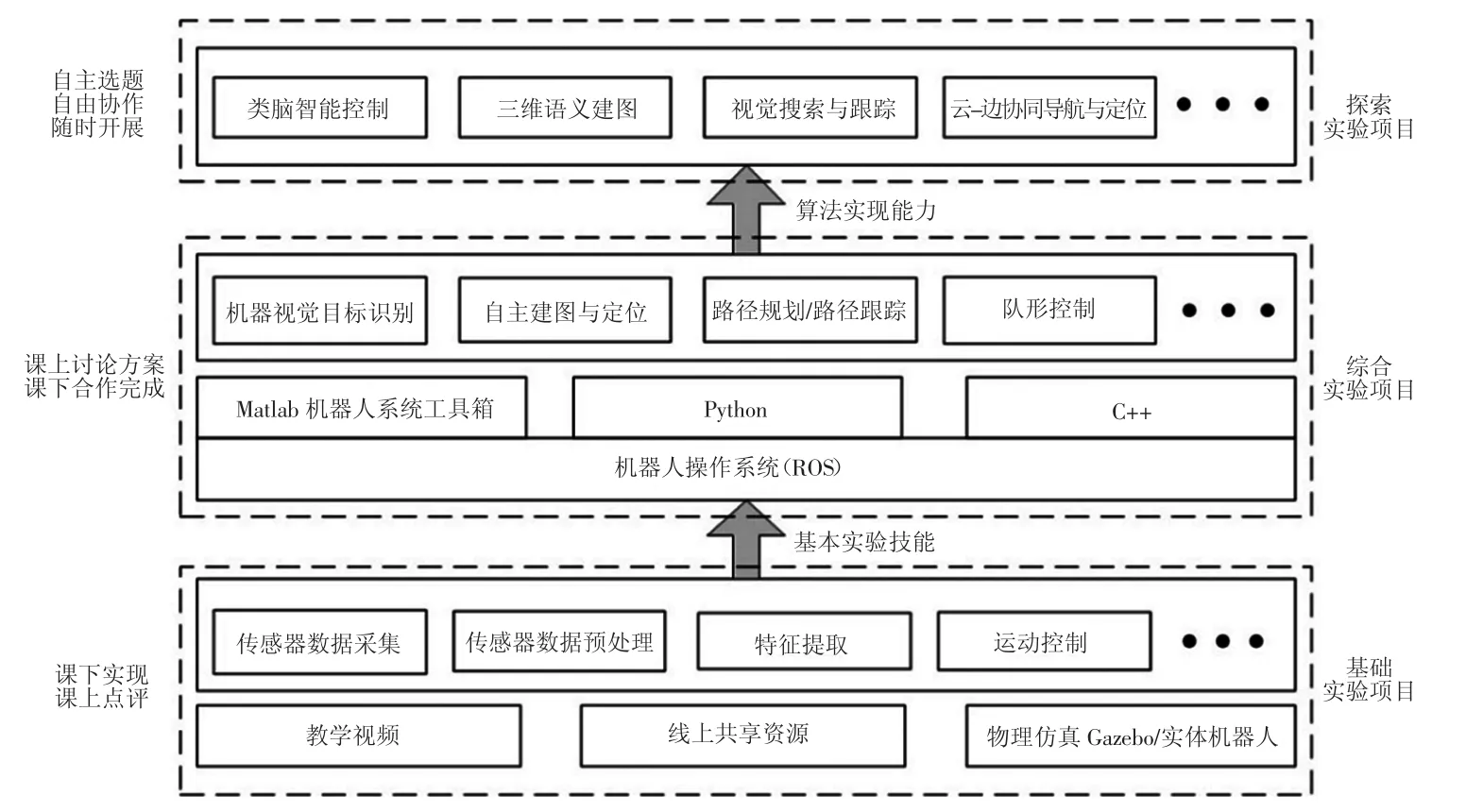
圖1 移動機器人智能感知與控制多層次實驗體系
“基礎實驗項目”旨在讓學生掌握移動機器人實驗所必備的編程框架、環境感知、運動控制機構的操作方法和基本實驗技能。
“綜合實驗項目”面向移動機器人關鍵或熱點技術設計實驗內容,教師與學生探討題目工程背景、任務書、實現方案等;學生組隊合作完成相關算法的設計、編程和實驗驗證,鍛煉對復雜工程任務的分析、綜合、團隊協作能力。
“探索實驗項目”面向工程難題、前沿探索性議題或學生自選議題,為學生提供“開放性”的協同創新環境,支持學生自由探索。
(二)創新激勵的“項目驅動式”高階思維實踐教學法
本文將高階思維和“項目驅動式”實踐教學相融合,首先通過合理創設面向工程實際或科研前沿的實踐項目,引起學生興趣,然后基于翻轉課堂、探究式教學等手段,開展面向高階思維培養的實踐教學。教學過程如圖2 所示,學生在課前借助教師發布的學習資料或其他資源自主學習必要基礎知識、熟悉實驗平臺和工具軟件。獲得基本實驗技能后,課外、課堂形成閉環互動式教學,課外,學生根據任務書進行算法開發、實驗調試和技術驗證,并將遇到的棘手問題反饋至課堂;課堂上教師組織學生進行交流互動,教師集中精力和時間與學生就其關心的關鍵難點、技術問題進行深入探討,實現個性化指導和因材施教,培養學生的高階思維能力,進而激發自主創新潛能。
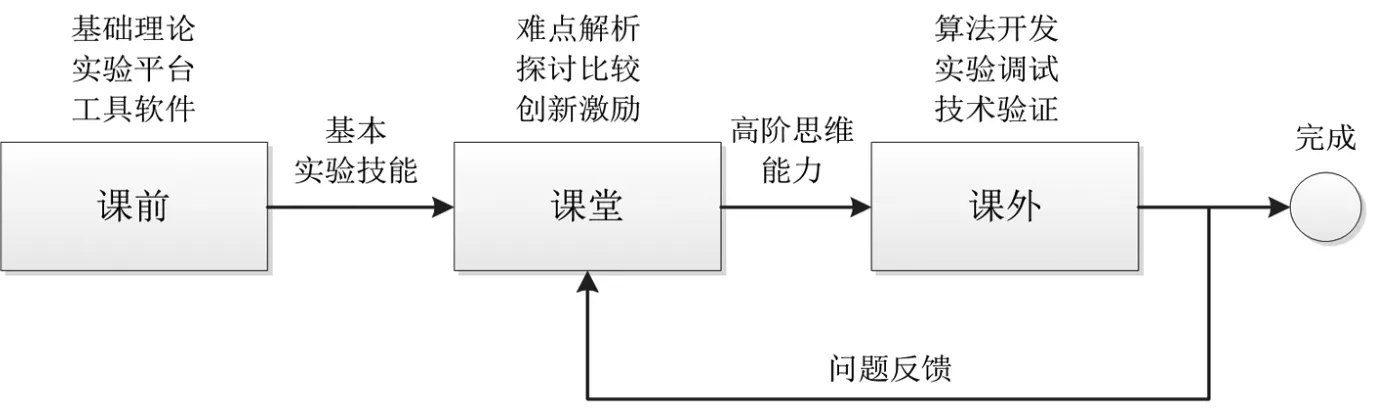
圖2 面向高階思維培養的翻轉課堂閉環實踐教學過程
針對不同層次實驗內容包含的知識維度,高階思維教學活動參考布魯姆(Bloom)教育目標二維分類法[14]開展。實驗課程的能力培養目標見表1,對移動機器人實踐課程內容進行了進階式的教學任務設計,將移動機器人實踐教學目標從傳統的驗證、重復設計性認知提升為基于高階思維的遷移性、創新性認知。
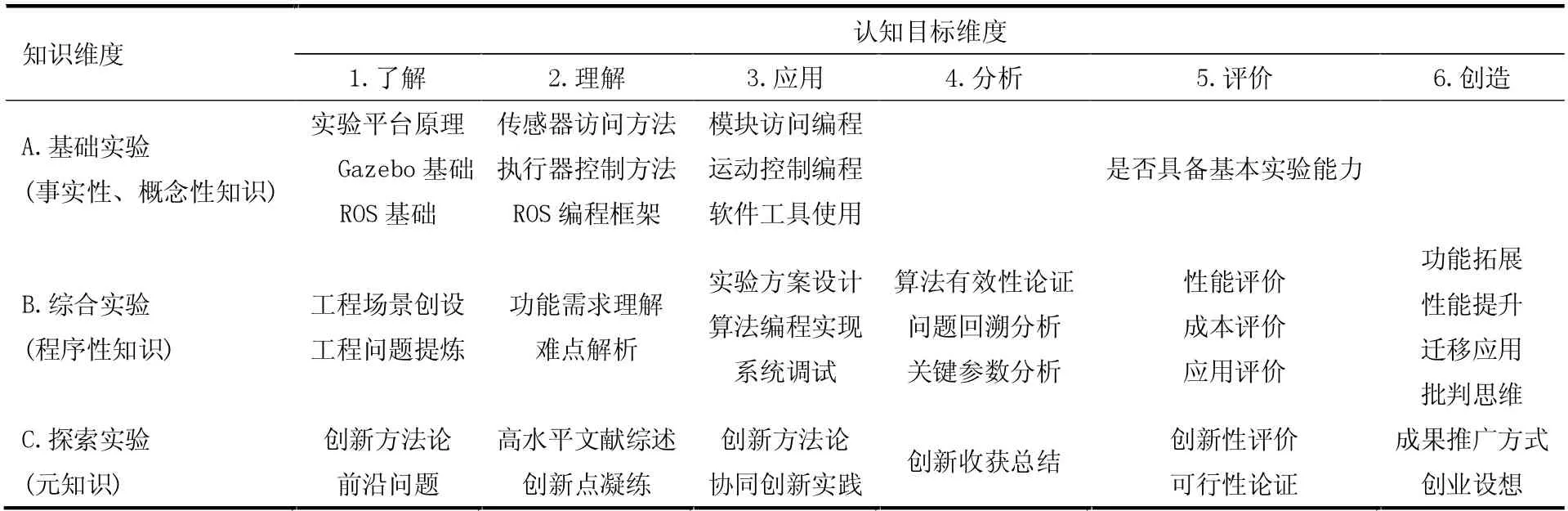
表1 融合項目驅動和高階思維的實踐課程教學目標
“基礎實驗”旨在基礎知識鞏固、驗證以及訓練基本實驗技能,實驗內容全部在課前完成,思維訓練專注于“了解/記憶-理解-應用”等低階思維。
“綜合實驗”的主要教學目標是讓學生綜合運用相關知識對移動機器人已較為成熟的關鍵技術進行復現和改進。采用項目驅動形式,分“創設-構思”“設計-綜合”“評價-遷移”幾個階段開展,并融入高階思維訓練。
對于“探索實驗”,其主要教學目標是引導學生嘗試探索移動機器人的前沿技術點。首先通過課堂探討,使學生了解移動機器人前沿問題;然后學生通過頭腦風暴等開放式探討獲得創新設想并進行協同創新實踐;最后,教師組織答辯對項目創新性、實用性進行評價,研討成果推廣方式和創業設想,使學生通過自主探索研究掌握創新創業方法論相關“元知識”。
二 移動機器人實踐課程實施案例
以移動機器人無先驗信息自主導航項目為例,展示“綜合實驗”的開展過程。
項目要求:①無先驗全局地圖;②機器人能夠自主到達指定目標點。
“項目驅動式”實踐教學過程如下。
本項目屬于“綜合實驗”,按照“創設-構思”“設計-綜合”“評價-遷移”分階段開展。
“創設-構思”階段。教師通過播放視頻、組織參觀等方式,讓學生了解倉儲機器人、AGV、掃地機器人等移動機器人典型應用場景;與學生研討上述場景中機器人必須具備的核心功能,引出本項目的實踐內容;引導學生分析復雜室內環境無先驗信息條件下,移動機器人完成自主導航所需解決的關鍵技術問題,形成任務書。
“設計-綜合”階段。學生通過分析任務書,分組討論獲得項目實現方案。將項目實踐內容分解為五個模塊:激光雷達點云數據采集與處理模塊實現環境中障礙物相對方位的探測;里程計數據采集模塊實現根據里程計輸出解算機器人當前的位置和姿態;局部路徑規劃及避障模塊根據環境障礙物相對位置信息和機器人本體位姿信息利用相應算法實現局部路徑規劃以規避障礙物;路徑跟蹤模塊根據機器人當前位姿利用相應算法實現使機器人趨向目標點的路徑跟蹤;機器人運動控制模塊完成兩輪差動機器人的運動控制。學生利用Matlab/Simulink 實現算法,并加載到實體或Gazebo 虛擬機器人驗證算法有效性。
“評價-遷移”階段。教師引導學生依據“性能評價—瓶頸調查—確定真因—改進方案—效果驗證”等高階思維方法進行循序、啟發式創新活動。
具體到本實施案例,有學生小組采用動態窗口法(DWA)實現即時避障。在性能測試過程中,發現在障礙物離導航的目的地很近,且障礙物對目標形成遮擋時,算法容易出現死鎖(圖3(a)所示)。

圖3 機器人運行軌跡
針對上述問題,教師指導學生首先回顧其使用的DWA 算法的核心思想。DWA 是在速度空間中采樣多組速度矢量(線速度和角速度(v,ω))并模擬推算機器人下一定時間內的軌跡,經過碰撞檢測去掉可能引起碰撞的軌跡,然后基于一個評價函數(如式(1)所示)對可行軌跡進行評價,選取最優軌跡(J(v,ω)最大)對應的速度驅動機器人運動。
式中:θ(v,ω)表示目標視線角(機器人朝向目標時為0,背向目標時為π),Dmin(v,ω)表示機器人當前軌跡與障礙物的最小距離,α,β∈[0,1]為固定權值。
通過分析式(1)所示的評價函數,學生發現,當目標點被障礙物近距離遮擋時,基于視線角和障礙物距離按照固定權值計算評價函數會周期性地得出相反的航向決策,表現軌跡評價函數大幅波動,造成機器人陷入死鎖圓周運動。即:機器人發生死鎖的原因為評價函數的固定權值造成的決策矛盾。
確定原因之后,得出解決這一問題的基本思路是將軌跡評價函數中的固定權值改進為自適應可調權值。學生開展頭腦風暴討論具體改進方案,包括權值調整的觸發條件、調整范圍、調整算法等。最終學生基于反饋控制思想,設計如式(2)所示的評價函數權值調整策略
其中,Dmin與式(1)中的意義相同,Ds表示避障閾值。
當機器人離障礙物很近時(Dmin≤Ds),動態降低評價函數中的目標朝向權重,同時增大避障權重,即離障礙物很近時機器人的航向決策以避障為主,離障礙物較遠時(Dmin>Ds),恢復評價函數固定權值,機器人優先朝向目標運動,兼顧避障,解決了問題(圖3(b)所示)。
三 結束語
機器人實踐教學是落實《中國教育現代化2035》、新工科等教育戰略規劃的重要陣地。本文提出的移動機器人實踐課程層次化課程體系設計、虛實結合的實驗平臺應用以及面向創新的“項目驅動式”高階思維實踐教學法符合學生認知規律,使之能夠自主、循序地學習相關知識并通過團隊合作完成實驗項目。教學實踐表明,上述教學改革內容在調動學生的學習積極性,培養自主學習能力,提高實踐能力,激發創新思維等方面都取得了較好的效果。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(野生動物)(2022年6期)2022-08-17 08:05:28
小哥白尼(野生動物)(2022年4期)2022-07-16 03:37:32
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
小哥白尼(野生動物)(2022年2期)2022-06-01 06:21:20
小哥白尼(野生動物)(2022年1期)2022-04-26 14:01:18
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
制造技術與機床(2017年3期)2017-06-23 08:11:21
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55