三自由度壓電偏擺臺耦合遲滯模型建模與逆補償
2023-12-04 02:39:26司馬津甫賴磊捷李朋志朱利民
光學精密工程 2023年20期
司馬津甫, 賴磊捷*, 李朋志, 方 宇*, 朱利民
(1. 上海工程技術大學 機械與汽車工程學院,上海 201620;2. 格魯斯特大學 計算與工程學院,英國 切爾滕納姆 GL50 2RH;3. 中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033;4. 上海交通大學 機械與動力工程學院 機械系統與振動國家重點實驗室,上海 200240)
1 引言
三自由度(Three Degrees of Freedom, 3-DOFs)壓電驅動Z向/偏擺納米位移臺能夠實現納米精度的精密調平和指向等功能,在激光通信和精密跟蹤瞄準、納米光刻、微納米操作機器人等領域都有著重要應用[1-2]。在其應用過程中,雖然壓電陶瓷驅動器(Piezoelectric actuator, PZT)具有超高分辨率、承載力大、頻響快、無噪聲等優點[3],但同時也存在遲滯和蠕變等非線性特性,這些非線性特性會嚴重影響納米定位平臺的定位精度,嚴重時會導致系統不穩定[4-5]。另外,并聯式的多自由度定位平臺由多個壓電陶瓷同時驅動,每一個壓電驅動器的運動都會在其他驅動器產生耦合遲滯輸出,這同樣會影響平臺的定位精度。因此,建立考慮耦合遲滯效應的多自由度耦合遲滯模型及其補償方法是提升三自由度壓電偏擺臺定位和跟蹤精度的關鍵。目前,遲滯特性的建模方法已經有很多種,如Duhem 模型,Bouc-Wen 模型[6],Preisach 模型[7],Prandtl-Ishlinskii(PI)模型等[8-9]。其中PI 模型具有算法和逆模型求解簡單、易于實時控制器實現等優點[10],被廣泛應用于遲滯特性的建模中。另外,為了描述率相關的動態遲滯特性,加拿大肯高迪亞大學的Janaideh 等人通過在密度函數以及算子閾值中引入輸入信號的變化率,建立了可以表示遲滯率相關特性的PI 模型[11-12]。
為了解決耦合遲滯問題,目前主要方法是通過設計解耦柔順機構以及通過平臺控制進行補償。但是,即便機械結構完全對稱無耦合,由于安裝誤差等問題依舊會引起軸間的交叉耦合。因此,通過對平臺的控制實現耦合補償是當下的研究熱點。耦合控制方法大致分為基于模型和無需模型兩類。基于模型的耦合控制通常需要準確建立耦合模型并采用逆模型前饋來補償耦合造成的誤差,如澳大利亞新南威爾士大學的Petersen 等建立的多輸入多輸出模型[13]等。耦合模型一般較為復雜,難以通過有限階數模型進行準確描述。在無需模型的耦合補償控制中,各軸間耦合被認為是某一軸輸出端的干擾,并以反饋控制的方式實現耦合的補償,如澳大利亞莫納什大學的Bhagat等建立的兩軸魯棒運動控制策略[14]等。
由以上分析可見,當前遲滯模型大多只能描述單軸遲滯特性,針對多軸耦合遲滯問題的研究還比較少見,這進一步增加了耦合遲滯補償的難度和復雜程度。對此,本文以三自由度壓電驅動納米偏擺臺為對象,設計了一種新型的耦合遲滯模型可以同時表征多個壓電驅動器間的耦合效應以及自身的遲滯效應。該遲滯耦合模型由兩部分組成,一部分是用三個PI 模型來表征壓電驅動器自身非對稱的遲滯效應,另一部分是使用九個增益來表征三軸間的耦合效應。通過求取該耦合遲滯模型的逆模型并進行開環前饋補償驗證了模型的有效性,并利用結合逆模型前饋和反饋的復合控制方法,來進一步消除系統耦合遲滯的影響,提升多軸運動的定位精度。
2 壓電偏擺臺及其模型
2.1 壓電偏擺臺實驗系統
實驗系統采用納動納米公司生產的型號為PT4V150-400S-S 的三自由度壓電偏擺臺,該平臺通過三組彼此成120°分布的壓電陶瓷驅動器進行驅動,其Z軸行程范圍為0~200 μm,X軸和Y軸最大偏轉角度分別為±2.2 mrad 和±2.5 mrad。壓電驅動放大電源同樣采用納動納米公司的PCM931S 模塊化壓電驅動/控制器。為實現平臺的實時運動控制,利用兩塊PCI6221 數據采集卡和宿主機-目標機模式構建了基于Simulink xPC Target 的硬件在環半實物實時仿真系統。三自由度壓電偏擺臺實驗系統以及各部件組成關系如圖1 所示。
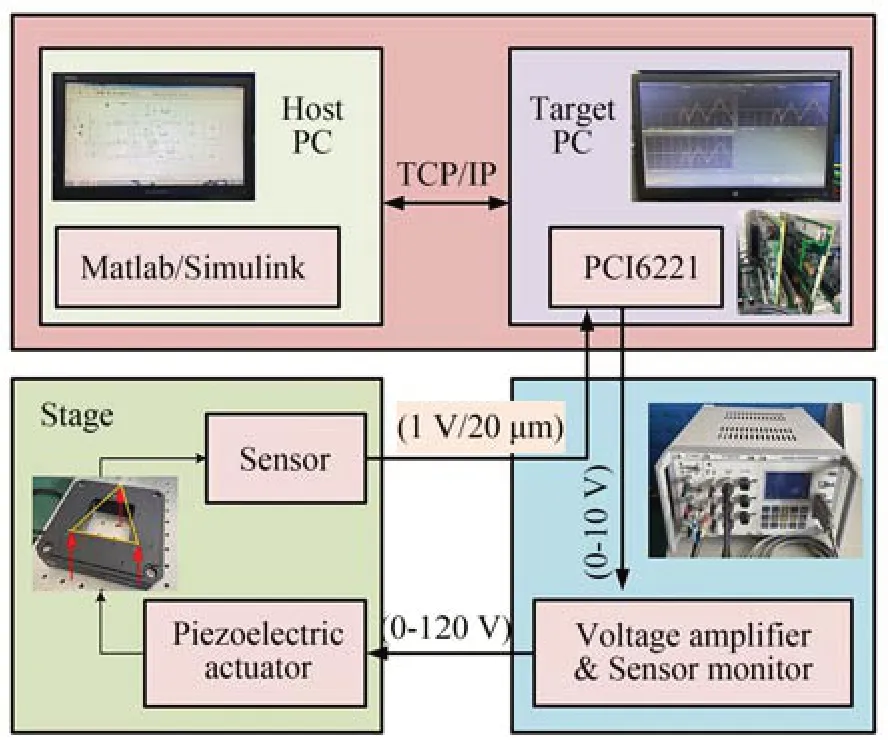
圖1 三自由度壓電偏擺臺實驗系統Fig.1 Experimental system of 3-DOFs tip-tilt-piston piezoelectric stage
2.2 壓電偏擺臺運動學模型
如圖2 所示,D1,D2,D3分別為三組壓電驅動單元的輸出點位,它們構成一個等腰三角形,其中a=89 mm,b=77 mm。平臺的三自由度分別為Z軸位移Δz以及分別繞X軸和Y軸的偏轉角度θx,θy。為了將末端平臺三自由度運動轉化為三組壓電驅動器的輸出,將全局坐標系O-XYZ固定在圖2 所示位置,其中D'4為D'2D'3的中點,O為D'1D'4的中點,θx,θy以如圖2 所示情況為正角度。
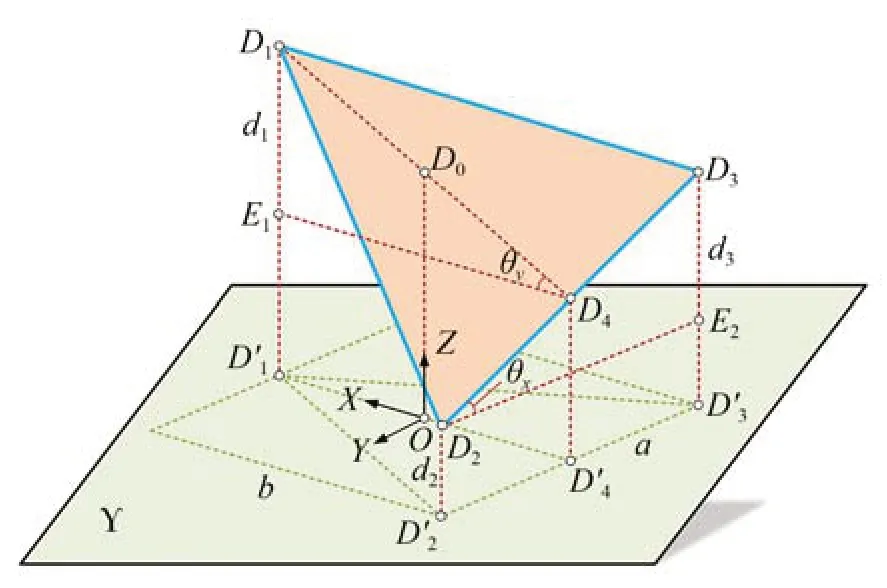
圖2 三自由度運動與壓電驅動器輸出位移的關系Fig.2 Relationship between 3-DOFs motion and output displacements of PZTs
在施加電壓前,壓電驅動器D1,D2,D3的位置與平面Υ 上D'1,D'2,D'3的位置重合,施加電壓后,三個壓電驅動器分別產生位移d1=D1D'1,d2=D2D'2,d3=D3D'3,該三組位移可由壓電驅動器內置的電阻式應變片傳感器測量獲得,由圖2 所示的幾何模型可得:
由此得到三自由度運動與三組壓電驅動器輸出位移之間運動學關系A如式(4)所示:
2.3 平臺耦合遲滯特性
由平臺運動學模型可知,平臺末端位姿由三組壓電驅動器輸出位移計算獲得,為了使末端位姿自由度間的耦合實現有效減少,需要對三個壓電陶瓷驅動器間的耦合位移進行消除。因此,本文嘗試對三個壓電驅動器間的耦合位移進行補償,此外三組驅動器間的解耦控制也更有利于單位的統一。
為了獲得平臺中壓電陶瓷驅動器間的耦合遲滯特性,給壓電驅動器1 施加如圖3(a)所示的電壓控制信號,采集的位移信號如圖3 所示。ω(t)為輸入電壓信號,yr(t)為傳感器采集的輸出位移信號。
由圖3(a)可見,平臺中單個壓電驅動器的輸入與輸出存在明顯的遲滯非線性特性會嚴重影響閉環系統的定位精度與穩定性。此外,由圖3(b)和圖3(c)可以看出,當壓電驅動器1 發生位移時,壓電驅動器2 和3 在沒有驅動信號輸入的情況下也產生了一定的耦合位移,并呈現遲滯回線關系,由此可見,各組壓電驅動器間還存在機械耦合遲滯效應,同樣也會影響系統的定位精度與穩定性。并且在相同輸入信號作用下,各驅動器的最大耦合位移也存在差別,這也增加了耦合遲滯建模的復雜程度。
3 耦合遲滯模型建模
遲滯非線性及其耦合效應都會嚴重影響納米定位平臺的定位精度,本節設計了一種可以同時準確描述多軸遲滯效應與耦合效應的耦合遲滯模型,該模型由兩部分構成,第一部分由PI 模型來表征遲滯效應,第二部分由恒增益量來表征不同壓電驅動器之間的耦合效應。
3.1 PI 遲滯模型
為了便于擴展并構建遲滯逆模型,本文選擇PI 遲滯模型來表征平臺的遲滯效應。PI 模型可以離散表達為:
其中:ω(t)為模型的輸入,yd(t)為模型的輸出,h(ω(t))為帶有常量α和β的多項式函數,表達為:
其中:N為Play 算子的個數,rk為Play 算子的閾值,表達為:
pk為Play 算子的權重值,由實驗數據辨識得到,[ω](t)為Play 算子的輸出,定義為:
其中:T為采樣周期,dm(ω(t),ω?(t)) 和dn(ω(t),ω?(t))是輸入函數ω(t)及其導數ω?(t)的動態包絡函數,定義為:
其中:γ和η為常數。由于輸入函數ω(t)是周期很小的離散型函數,因此其導數ω?(t)可以看作:
3.2 耦合遲滯模型
上文中的PI 模型可以很好地表征每一個壓電驅動器的遲滯效應,但三自由度偏擺臺中每一個壓電驅動器發生位移時,都會對其他的壓電驅動器產生機械耦合影響。因此,理論上需要使用9 個PI 遲滯模型來完全描述三個壓電驅動器間的耦合遲滯效應。然而,9 個遲滯模型中需要辨識的參數過多,使其很難應用于實際的遲滯補償當中。為了簡化模型,本文設計了如圖4 所示的耦合遲滯模型,其中PIk(k=1,2,3)為三個壓電驅動器自身的PI 遲滯模型,而Cij(i,j=1,2,3)則為9 個恒增益量,用于表征不同壓電驅動器之間的耦合效應,PI 模型中的未知量以及恒增益量后續均由辨識獲得。該簡化模型能夠極大減少耦合遲滯模型中需要辨識的參數數量,以便于在實際應用中實現。
如圖4 所示,ω(t)為耦合遲滯模型的輸入,yd(t)為單個PI 遲滯模型的輸出,y(t)為耦合遲滯模型的輸出,它們之間的關系可以表達為:
3.3 耦合遲滯逆模型
耦合遲滯模型由三個PI 模型以及九個恒增益量表示,同理,用于補償耦合遲滯效應的逆模型也由三個逆PI 模型以及九個逆恒增益量表示,由此耦合遲滯逆模型可以設計為如圖5 所示的結構。如前文所述,PI 模型的優點之一就是便于構建逆模型,將原輸入信號當做逆模型的輸出信號,原輸出信號當做逆模型的輸入信號便可以辨識出逆模型的參數。
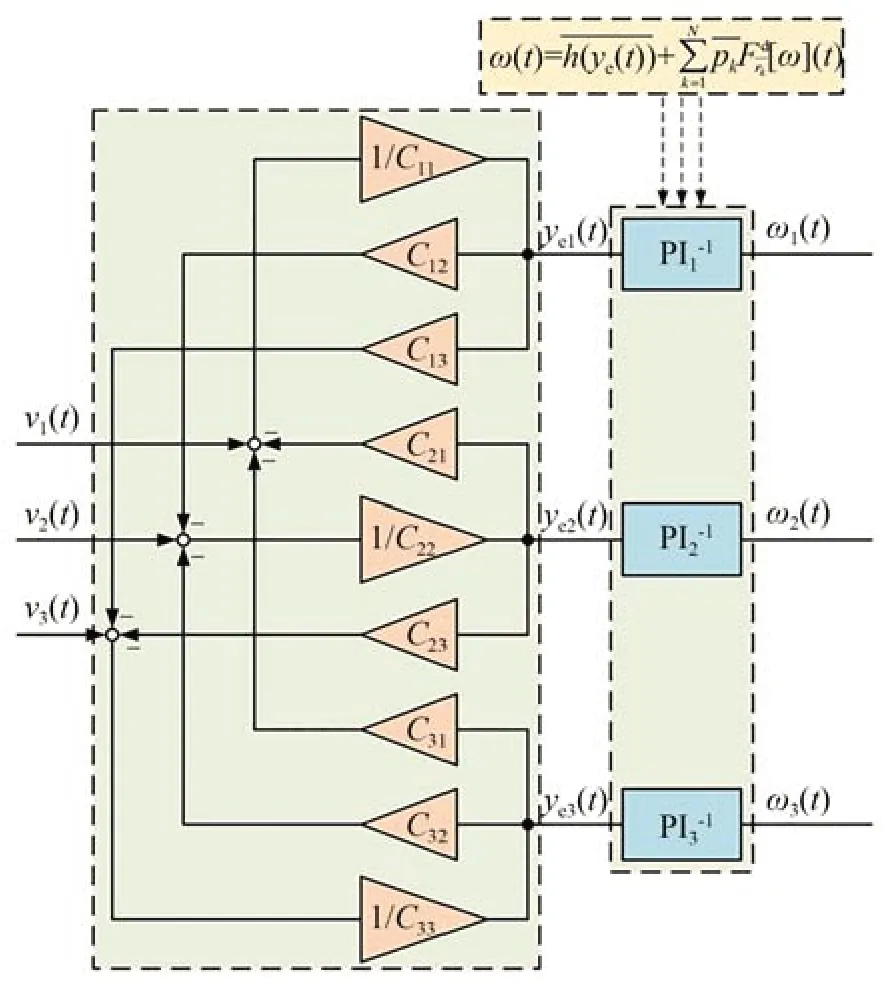
圖5 耦合遲滯逆模型Fig.5 Coupled hysteresis inverse model
假設遲滯模型的輸入ω(t)為遲滯逆模型的輸出,ye(t)為遲滯逆模型的輸入,PI 逆模型表達為:
v(t)為耦合遲滯逆模型的輸入,由式(15)~式(17)可以推導得到ye(t)與v(t)的關系如下:
4 耦合遲滯模型辨識
4.1 PI 遲滯模型參數辨識
系統共有三個壓電驅動器對應三個獨立的PI 模型,因此需要分別辨識三組不同模型參數。以壓電驅動器1 為例,首先,在開環系統中單獨給定壓電驅動器1 如圖3(a)所示的遞增三角波信號,同時由內置傳感器檢測得到壓電驅動器實際輸出位移對應的電壓信號(0.05 V/μm)。然后使用Matlab 中的工具箱Optimization,將輸入信號與輸出信號導入,并采用如下目標函數的約束二次優化方法進行參數辨識:
其中:M1=[yd(0),yd(1),…,yd(n)]T,是模型的輸出位移,n=tr/Ts,tr是輸入信號的時間長度,Ts是系統采樣周期,K1=[yr(0),yr(1),…,yr(n)]T是由傳感器采集到的壓電驅動器1 的實際位移電壓信號,X=[α,β,p1,p2,…,pN,γ,η]是模型中所有需要辨識的參數。
給定Play 算子的數目等于10,由式(7)可以求出閾值rk(k=1,2,…,10)。同理,壓電驅動器2 和3 的PI 模型參數也可以由如上方法辨識獲得。三個壓電驅動器各自的遲滯模型參數辨識結果如表1 所示。
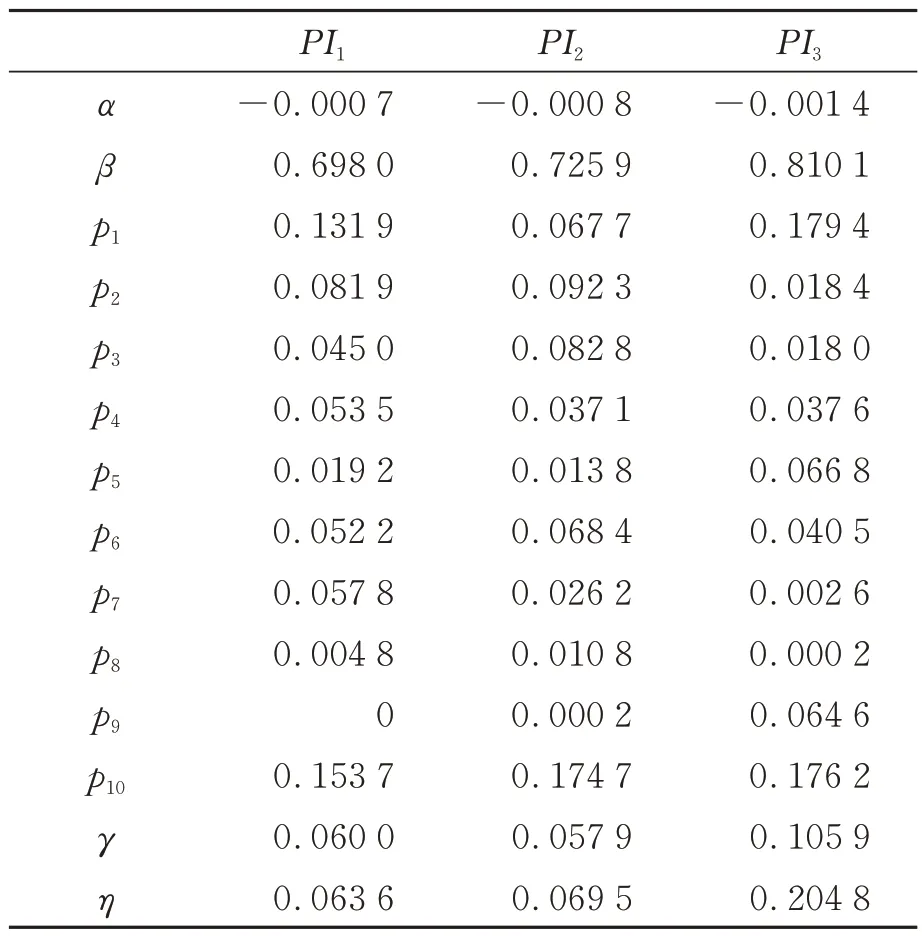
表1 PI 模型參數辨識結果Tab.1 Parameter identification results of PI model
辨識模型輸出與實際輸出對比如圖6 所示,通過均方根誤差以及最大相對誤差來檢查模型辨識準確性,由圖6(d)可以看出,最大均方根誤差小于0.5 μm,具有較高的模型辨識精度。
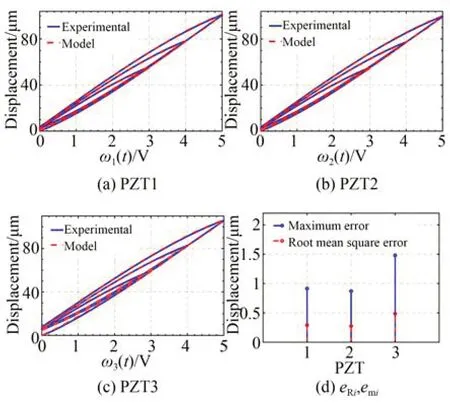
圖6 PI 模型辨識結果及誤差Fig.6 Identification results and errors of PI model
4.2 耦合遲滯參數辨識
每個壓電驅動器對自身不存在耦合,因此設置耦合參數C11=C22=C33=1,此外,還需要確定其余的耦合參數Cij(i≠j),即每一個軸與其他軸之間的耦合都可以看作是對該軸自身遲滯模型進行線性縮小。以壓電驅動器2 對壓電驅動器1的耦合參數C21為例,給壓電驅動器2 如圖3(a)所示的驅動信號,采集到如圖7 所示的壓電驅動器1 耦合位移K21=[y21(0),y21(1),…,y21(n)]T。可見,由于耦合噪音很大,因此先使用高斯濾波器,平滑因子設為0.01,對耦合位移進行濾波后再進行參數辨識。然后使用Matlab 中的優化工具箱Optimization,并選用最小二乘法對耦合參數C21進行辨識,優化計算的目標函數為:
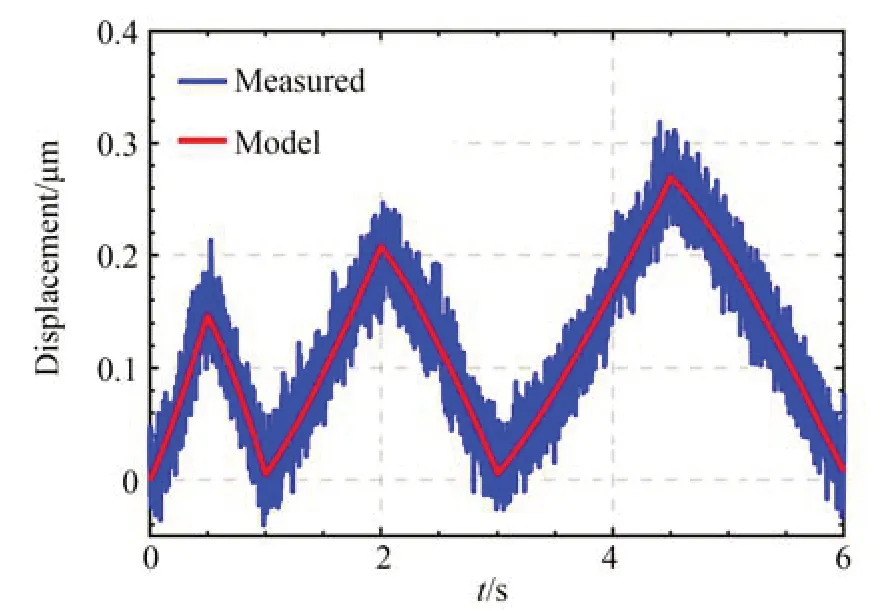
圖7 壓電驅動器2 對壓電驅動器1 耦合參數辨識結果Fig.7 Identification results of coupling parameters of PZT 2 to PZT 1
同理,其余耦合參數也可以用上述方法進行辨識,辨識得到的耦合參數如表2 所示。
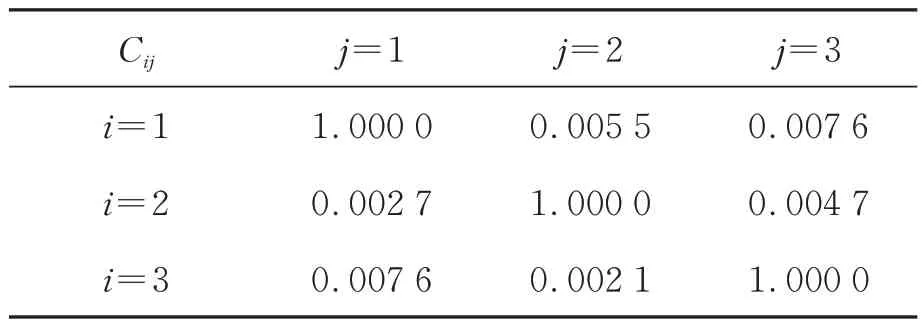
表2 耦合參數辨識結果Tab.2 Coupling parameter identification results
壓電驅動器2 對壓電驅動器1 產生的耦合遲滯辨識模型結果與實際輸出位移對比如圖7 所示,同樣通過均方根誤差eR來判斷耦合參數辨識的準確性,結果如表3 所示,可以看出,最大均方根誤差僅為0.044 μm,耦合遲滯模型參數辨識結果同樣具有較高的準確度。
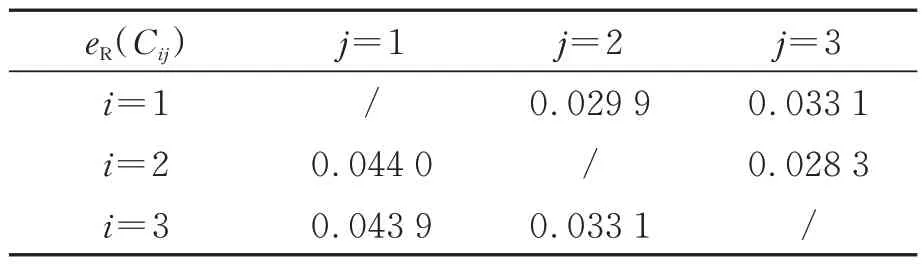
表3 耦合模型與實際耦合的均方根誤差Tab.3 Root mean square error of coupling model and actual coupling(μm)
4.3 逆模型參數的辨識
由于PI 模型的可逆性,其逆模型的辨識可以參考正模型的辨識過程,只需將輸入信號與輸出信號互換。在開環系統中給每個壓電驅動器施加如式(24)所示的輸入信號:
而輸出信號中的噪音會導致輸入信號導數的波動,不利于參數的辨識,因此先使用五階切比雪夫濾波器對輸出信號進行平滑處理,然后將其作為輸入函數,而將式(26)所示信號作為輸出信號。辨識過程中,給定Play 算子的數目等于10,可由式(7)可以求出閾值rk(k=1,2,…,10),實現對逆模型參數進行辨識,辨識模型輸出與實際輸出對比如圖8 所示,參數辨識結果如表4 所示,最大均方根誤差僅為1.032 7 μm,具有較高的模型辨識精度。
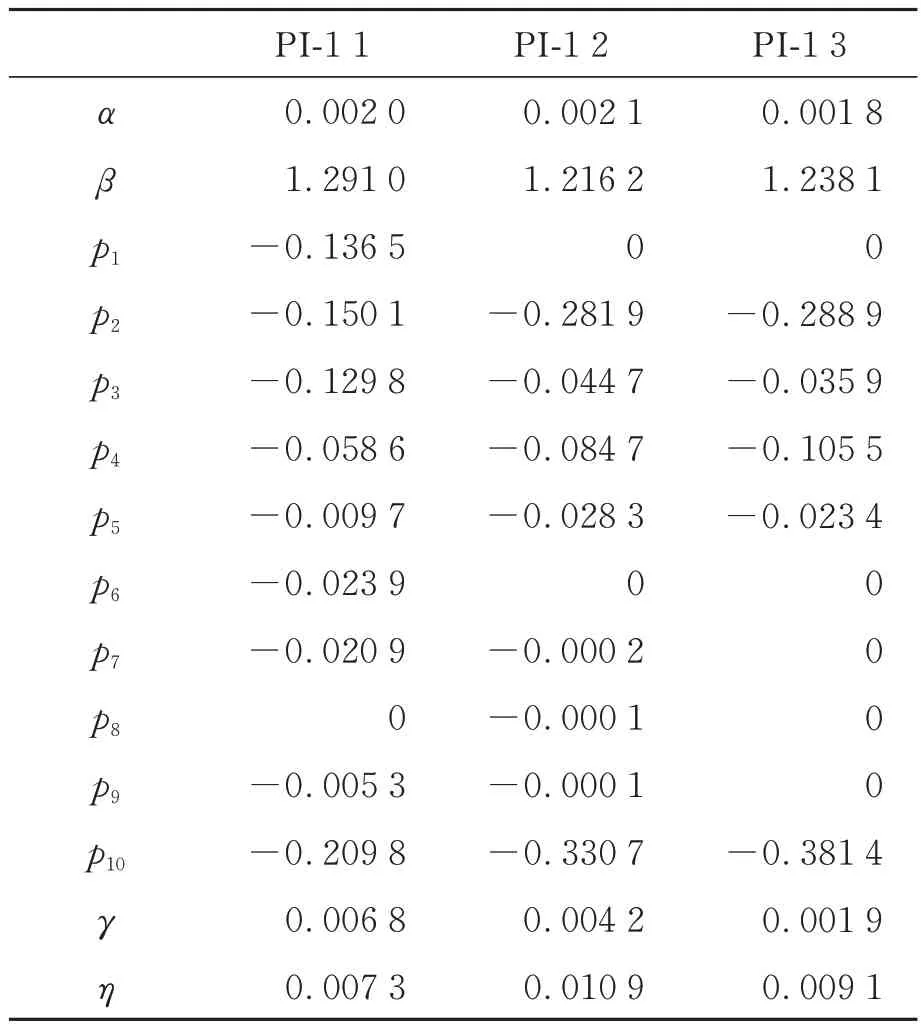
表4 PI 逆模型參數辨識結果Tab.4 Parameter identification results of PI inverse model
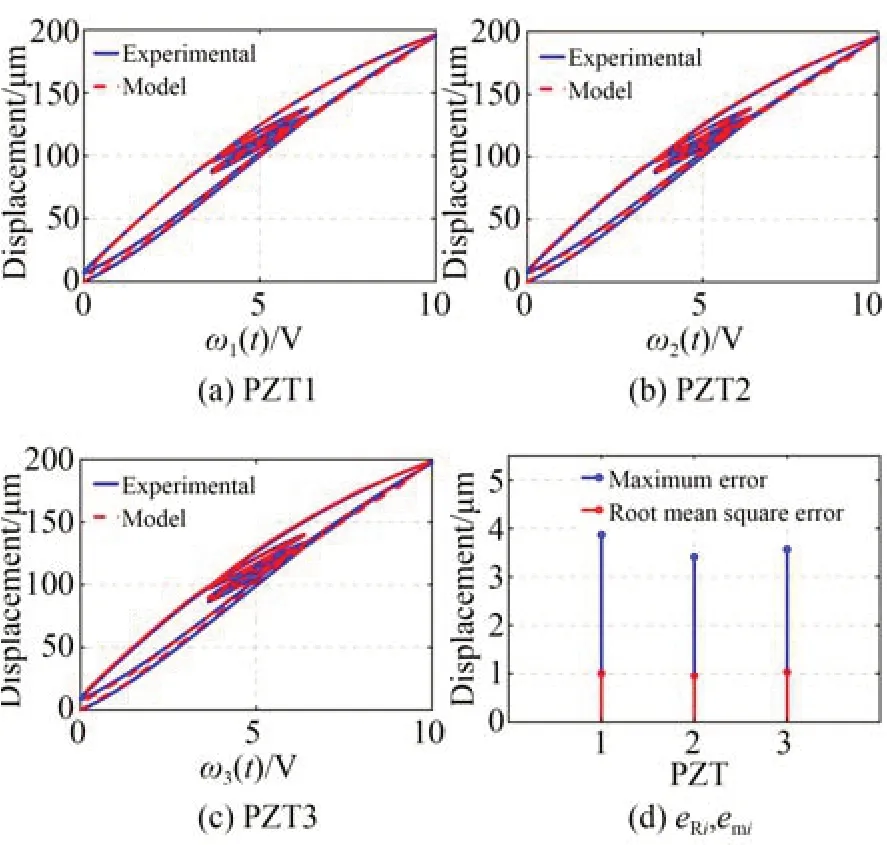
圖8 PI 逆模型辨識結果及誤差Fig.8 PI inverse model identification results and errors
4.4 耦合遲滯逆模型前饋補償實驗驗證
為驗證逆模型辨識準確性,將如圖5 所示耦合遲滯逆模型開環置于壓電偏擺臺前方,用于補償三個壓電驅動器自身的遲滯非線性以及它們之間的耦合遲滯效應,補償結果如圖9 所示。可見,經過耦合逆遲滯模型補償后,三個壓電驅動器最大耦合位移均下降了70%~85%,同時三個壓電驅動器的遲滯效應也得到了補償,證明了所建立耦合遲滯逆模型的有效性。
5 軌跡跟蹤控制
5.1 復合控制器設計
為進一步減少耦合遲滯對平臺定位精度和跟蹤性能的影響,設計了結合耦合遲滯逆模型前饋補償與PID 反饋的復合控制器,控制器結構如圖10 所示,該控制系統以平臺三自由度末端位姿作為參考信號,經如式(4)所示運動學關系A-1變換后生成三路壓電驅動器的參考信號,三路反饋信號則由壓電驅動器內置傳感器采集獲得。
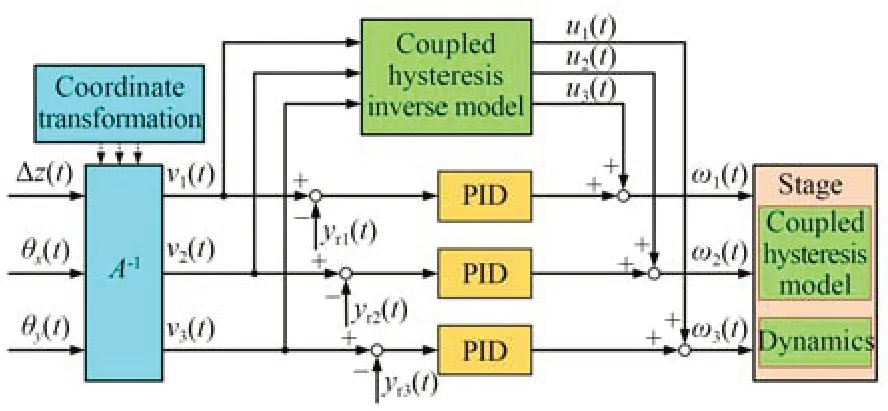
圖10 耦合遲滯逆模型前饋復合控制系統Fig.10 Compound control system with coupled hysteresis inverse model feedforward
5.2 三維空間軌跡信號跟蹤
利用上述復合控制器,將如式(27)所示的三維空間軌跡信號作為平臺運動的參考輸入,并與單獨閉環控制結果進行對比,以進一步證明耦合遲滯模型以及復合控制器的有效性。
軌跡跟蹤結果如圖11 所示,由跟蹤結果可知,復合控制下,平臺偏轉角度和Z 軸位移的最大均方根誤差分別僅為0.06 mrad 和0.42 μm,相比單純閉環反饋控制結果分別減小了72%和87.5%,最大誤差也分別減少了76% 和83%。由此證明了本文所建立的耦合遲滯模型可以較好的提高定位精度,減少耦合及遲滯帶來的影響。
6 結 論
為了解決多軸并聯壓電驅動納米定位平臺的耦合遲滯問題,本文以三自由度壓電驅動的納米偏擺臺為對象,提出了一種可以同時描述多個壓電驅動器間耦合效應及壓電驅動器自身遲滯效應的耦合遲滯模型。首先將末端三自由度的運動轉化為三組壓電驅動器的輸出。隨后建立了基于PI 模型和恒增益量的耦合遲滯模型,并對該模型及逆模型進行參數辨識。耦合遲滯模型中,PI 模型表征壓電驅動器自身遲滯效應,恒增益量表征壓電驅動器間耦合效應。最后分別進行了開環逆模型前饋補償實驗以及結合逆模型前饋和反饋控制的球信號軌跡跟蹤實驗。實驗結果證明,逆模型開環補償使三個壓電驅動器間的最大耦合降低了70%~85%,有效消除了平臺耦合遲滯的影響,證明了所提出耦合遲滯模型的有效性。復合控制方式下,跟蹤球信號時最大均方根誤差僅為0.06 mrad 和0.42 μm,與逆模型補償前相比減少了72%和87.5%,最大誤差也分別減少了76%和83%,有效提升了三自由度偏擺臺的定位精度。本文所提出的耦合磁滯模型也可以應用于其他類型的壓電驅動多軸納米定位平臺上。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
核科學與工程(2021年4期)2022-01-12 06:30:26
鴨綠江(2021年35期)2021-04-19 12:24:18
今日農業(2020年19期)2020-12-14 14:16:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
中學物理·高中(2016年12期)2017-04-22 11:53:03
光學精密工程(2016年6期)2016-11-07 09:07:19