張拉整體機器人構型設計及非線性力學特性分析
2023-12-04 05:39:20劉瑞偉林勛濤郭宏偉王春龍謝浩唐振宇
機床與液壓 2023年21期
劉瑞偉,林勛濤,郭宏偉,王春龍,謝浩,唐振宇
(1.廣州航海學院船舶與海洋工程學院,廣東廣州 510725;2.哈爾濱工業大學機器人技術與系統國家重點實驗室,黑龍江哈爾濱 150001)
0 前言
近年來,隨著科技的發展,深空探測已成為航空航天領域的重要研究方向[1-2]。在深空探測任務中,傳統探測機器人存在造價貴、著陸方式復雜、投放數量少等問題[3-5],因此,新型星球探測器的研制愈發迫切。
張拉整體結構是由桿、索間的自應力實現穩定的空間網格結構,其設計特點是剛體懸掛在彈性元件的平衡張力網絡中。作為一種新興類型的軟機器人,在外載的作用下,它表現出柔順、輕巧、抗沖擊的特性,因其可進行折疊存儲、實現批量投放以及完成深空探測、深海探測、災后救援等危險且未知性極高的任務,近年來成為各國橋梁建筑、航空航天、機器人等領域的研究熱點[6-10]。
目前對于張拉整體結構的研究主要集中在找形及形狀優化上,其中力密度法[11]、動力松弛法[12]、能量法[13]和迭代算法[14]等被廣泛應用。清華大學ZHANG 等[15]提出了一種新型力密度法并成功應用于張拉整體結構的找形研究中,提高了找形效率。哈爾濱工業大學LU等[16]基于動態松弛法研究了張拉整體結構力學特性,并提出多組實例進行驗證。東南大學CAI等[17-18]基于力密度和分組方法,提出了一種針對多應力模態張拉整體的找形方法,通過最小化能量函數獲得張拉整體結構的節點和拉索的空間位置。西安電子科技大學林敏等人[19]針對傳統力密度法找形效率低下的問題,采用改進魚群算法與力密度法相結合,提高了張拉整體結構找形效率。哈爾濱工程大學羅阿妮等[20]基于力平衡原理,依據構件與節點連接矩陣定義,完成自應力穩定構型及分析。
與找形相比,張拉整體概念在工程實踐中的應用很少。典型的張拉整體結構工程應用有YOU和 PELLEGRINO[21]提出的可展開天線DMR,哈爾濱工業大學劉榮強教授團隊研制的張拉整體式天線結構[9,22],NASA提出的“SUPERball”六桿張拉整體機器人[23-24]及加州伯克利分校研制出“TT-X”系列張拉整體機器人[25-26]。
在深空探測工作中,張拉整體機器人將被直接從太空投放至星球表面,著陸時會受到很大的沖擊力。為防止因載荷過大而出現壓桿屈曲失效、拉索屈服失效等問題,從而導致探測任務失敗,研究載荷狀態下結構力學特性十分必要。CAI等[27]基于典型的張拉整體結構模型,研究了考慮初始缺陷的張拉整體結構力學行為。TRAN和LEE[28]提出了一種用于張拉整體結構彈性分析中大變形的數值方法,考慮了幾何和材料的非線性。
因此,本文作者針對六桿張拉整體結構,通過節點矩陣和連接矩陣,建立張拉整體結構的數學模型。在此基礎上,結合ANSYS軟件,建立六桿張拉整體結構的非線性力學分析模型,進行六桿張拉整體結構的力學性能分析和結構參數的敏感度分析,得出提高六桿張拉整體結構力學性能的有效方法;最后研制六桿張拉整體機器人樣機進行翻滾實驗,驗證六桿張拉整體機器人的運動性能。
1 六桿張拉整體機器人構型設計
圖1所示為美國航空局AMES研究中心提出的六桿張拉整體機器人進行地外行星探測的任務示意。
在MATLAB環境中,通過建立節點矩陣、連接矩陣及矢量矩陣,構建了一種六桿張拉整體結構數學模型,為后續力學性能分析提供基礎。
1.1 節點矩陣
因此,可以得到任一節點坐標,坐標通式可以表示為
(1)
式中:ni(i=1,2,3,…,12)表示第i個節點的坐標;Xi、Yi、Zi表示第i節點的坐標。
因此,六桿張拉整體結構的節點矩陣可以表示為
(2)
1.2 構件連接矩陣
在張拉整體結構的數學模型中,通過構建連接矩陣可以反映各個構件和節點之間的函數關系。六桿張拉整體結構每個節點上連接1根桿構件和4根索構件,在連接矩陣中,構件起點對應元素為“-1”,構件終點對應元素為“1”。桿構件及其連接節點具體連接情況如表1所示。
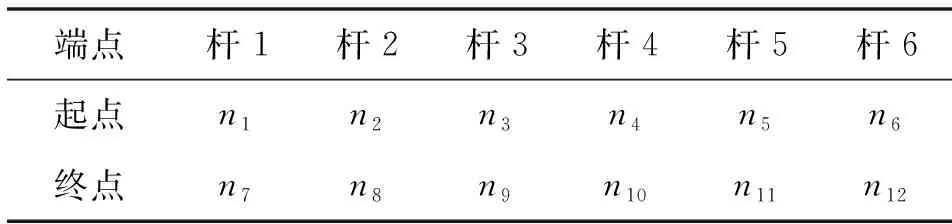
表1 桿構件與節點的連接Tab.1 Connection relationship between bars and nodes
根據桿單元及其連接節點的情況,可以推導出桿構件的連接矩陣為
(3)
同理,可以通過相同的方法獲得索構件及其兩端節點的連接矩陣:
(4)
1.3 構件矢量矩陣
利用節點矩陣和連接矩陣可以獲得相應構件向量。所有桿構件組成結構的桿構件矢量矩陣,其表達形式為
(5)
式中:bi(i=1,2,…,6)表示第i根桿向量。
同理,所有索構件組成結構的索構件矢量矩陣表達形式為
(6)
式中:si(i=1,2,…,24)表示第i根索向量。
設原點為直線n1n2中點O,n1、n2和n5為著地點,并作為全約束節點。通過上述分析,即可在MATLAB軟件中計算六桿張拉整體結構節點坐標矩陣、連接矩陣及構件矢量矩陣,建立六桿張拉整體結構的數學模型,如圖2所示,為后續力學性能分析提供基礎。
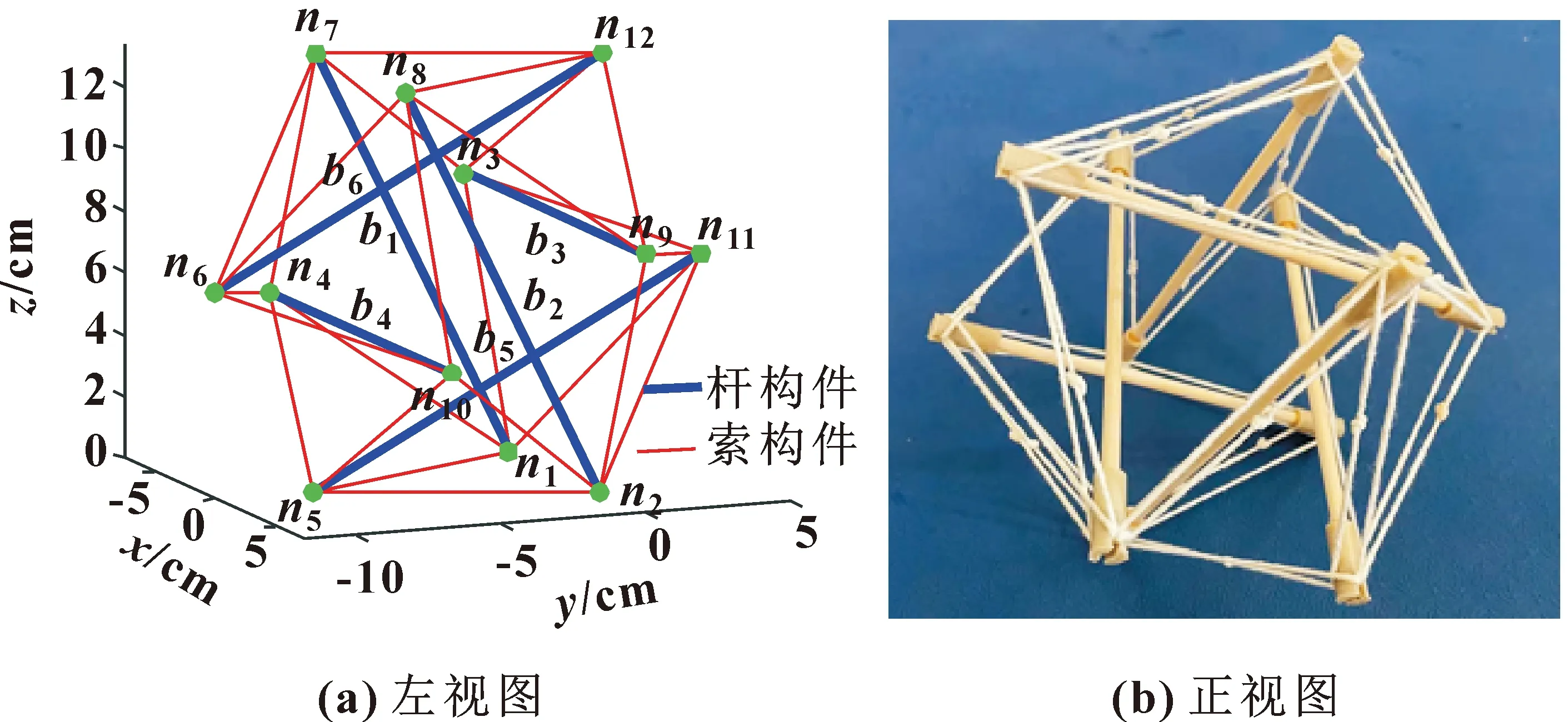
圖2 六桿張拉整體結構數學模型Fig.2 Mathematical model of six-bar tensegrity structure: (a)left view;(b)front view
2 六桿張拉整體結構非線性力學特性分析
2.1 基于ANSYS的六桿張拉整體結構模型
由于張拉整體結構通過索-桿間張緊力維持平衡,預應力數值的變化會影響張拉整體結構的幾何剛度矩陣,存在幾何非線性問題,進而影響結構的承載剛度及結構剛度,因此在分析中需考慮這種影響。六桿張拉整體結構索、桿單元和材料的屬性如表2所示。
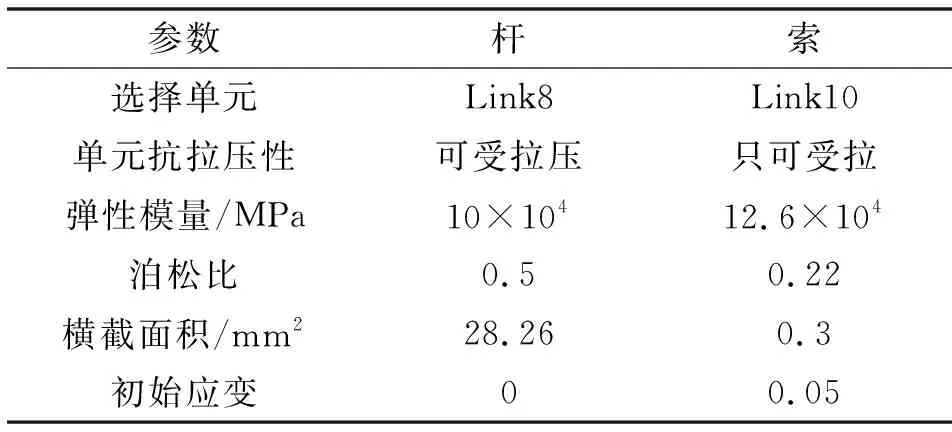
表2 材料屬性Tab.2 Material properties
在ANSYS中建立分析模型如圖3所示。
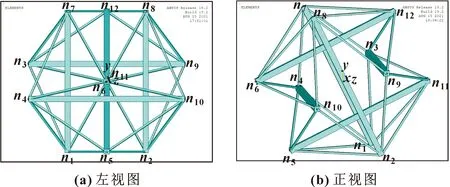
圖3 六桿張拉整體有限元分析模型Fig.3 Finite element model of six-bar tensegrity structure: (a)left view;(b)front view
2.2 軸向載荷對結構變形影響
六桿張拉整體機器人應用于深空探測時,投放下落過程存在著很大的軸向載荷,這個軸壓載荷對其橫向振動特性影響很大,會造成壓桿屈曲失效、拉索屈服失效等,從而導致探測工作失敗,因此研究軸向載荷對結構變形的影響尤為重要。
為研究結構的節點位移與載荷的關系,對頂部的3個節點n7、n8和n12依次施加沿z軸負方向的軸向載荷,圖4所示為施加載荷方向,橙色箭頭為軸向載荷方向。
分析過程中固定模型底部的3個節點n1、n2和n5,對頂部3個節點n7、n8和n12施加沿z軸負方向的載荷,施加載荷的大小從0 N逐漸變化到7 000 N,共進行了8次模擬分析,結構變形如圖5所示。其中虛線框架為變形前的模型,圖中的標尺為節點位移量,紅色表示節點位移量最大,藍色最小。
在不同軸向載荷下,分析得到軸向與徑向變形的變化規律,如表3所示。六桿張拉整體結構的軸向、徑向變形隨著軸向載荷的增加而增加,其中軸向變形從0 mm增加到0.94 mm,增幅趨勢較平緩;徑向變形從0 mm增加到0.28 mm,增幅趨勢平緩。
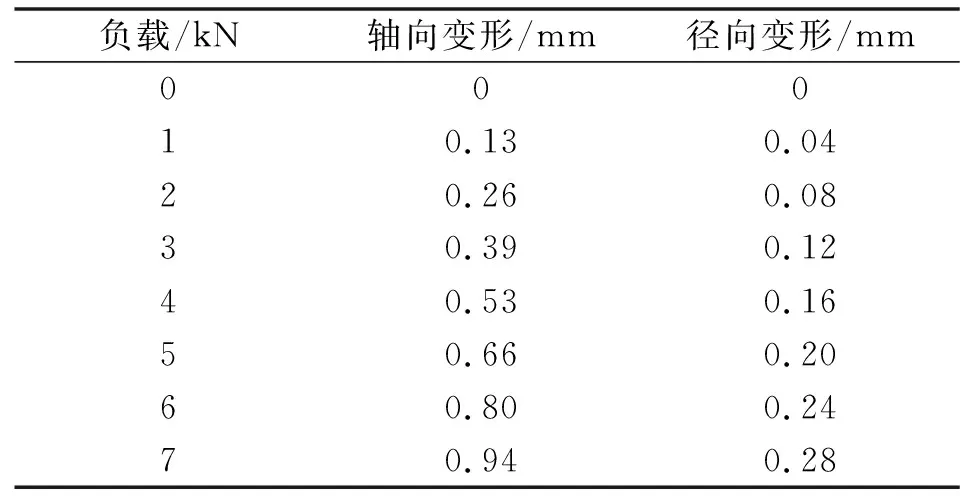
表3 不同軸向載荷下的節點最大位移量Tab.3 Maximum displacement of nodes under different axial loads
由此可得,軸向載荷對軸向、徑向變形的非線性力學特性影響較小。
2.3 扭轉載荷對結構變形影響
按上述研究方法,對上端面頂部3個節點連線方向依次施加扭轉載荷,圖6所示為施加載荷方向,黑色箭頭為扭轉載荷方向。
分析過程中固定模型底部的3個節點n1、n2和n5,對頂部3個節點n7、n8和n12施加扭轉載荷,載荷大小從0 N·m逐漸變化到4 200 N·m,結構變形如圖7所示。

圖7 扭轉載荷下六桿張拉整體結構變形示意Fig.7 Deformation of six-bar tensegrity structure under torsional load:(a)left view;(b)front view
在不同扭轉載荷下,分析軸向、徑向及扭轉變形的變化規律如表4所示。
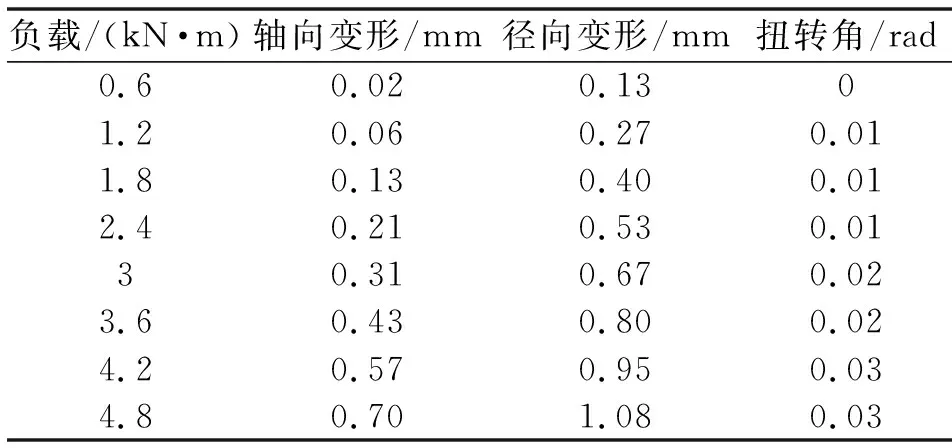
表4 不同扭轉載荷下的節點最大位移量Tab.4 Maximum displacements of nodes under different torsional loads
由表4可得:隨著扭轉載荷的增加,軸向變形量逐漸增加,且在0.6~3 kN·m上升速率較高,3~4.8 kN·m上升速度放緩,增幅趨勢較明顯;徑向變形從0 mm增加到1.08 mm,增幅趨勢較平緩;扭轉角從0 rad增加到0.03 rad,增幅趨勢平緩。
由此可得,扭轉載荷對軸向變形的非線性力學特性影響大,對徑向變形的非線性力學特性影響較小,對扭轉角呈線性變化。
2.4 預應力對結構變形影響
為分析預應力變化對六桿張拉整體結構變形的影響,保證六桿張拉整體結構的其他參數不變,設定5組初始預應力值,通過改變索構件預應力倍數,研究預應力對六桿張拉整體結構變形的影響。
同理,對頂部的3個節點n7、n8和n12施加軸向載荷,大小恒為100 N,在不同預應力條件下,通過計算得到軸向、徑向變形的變化規律,如表5所示。
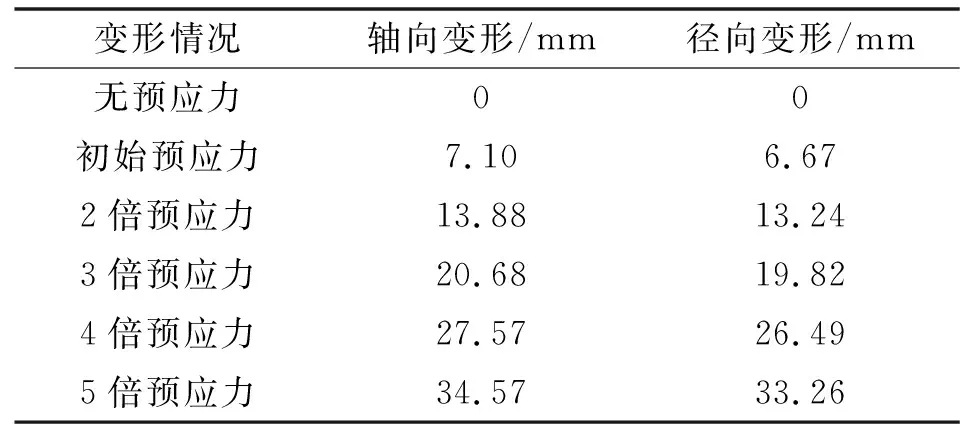
表5 軸向載荷下不同預應力對應的節點最大位移量Tab.5 Maximum displacements of nodes under different prestress with axial load
由表5可以看出:在軸向載荷下,六桿張拉整體結構的軸向、徑向變形均隨著預應變的增加而增加,其中軸向變形從0 mm增加到34.57 mm,徑向變形從0 mm增加到33.26 mm,增幅趨勢較平穩。無預應力時,結構變形量為0 mm,隨著預應力成倍增加,其帶來的變化并未成倍增加,增幅呈直線變化。
同理,對頂部的3個節點n7、n8和n12施加扭轉載荷,大小恒為600 N·m,通過計算得到各向變形規律,如表6所示。

表6 扭轉載荷下不同預應力對應的節點最大位移量Tab.6 Maximum displacements of nodes under different prestress with torsional load
由表6可知:在扭轉載荷下,其中軸向變形從0 mm增加到34.57 mm,徑向變形從0 mm增加到28.98 mm,增幅趨勢較平穩,各向位移受預應力增大的影響與在軸向載荷下的情況類似,扭轉角變化不明顯。
該結果表明:預應力對軸向變形、徑向變形及扭轉變形非線性力學體系影響呈線性變化。
2.5 結構參數對結構變形影響
當構件軸向載荷保持不變時,六桿張拉整體結構的彈性剛度僅取決于結構參數,在計算過程中,由于彈性模量與橫截面積是乘積關系,所以文中只作橫截面積的參數分析。對頂部3個節點分別施加軸向載荷1 000 N,索桿構件分布如圖8所示,同類構件截面變化對結構變形的影響如圖9所示。
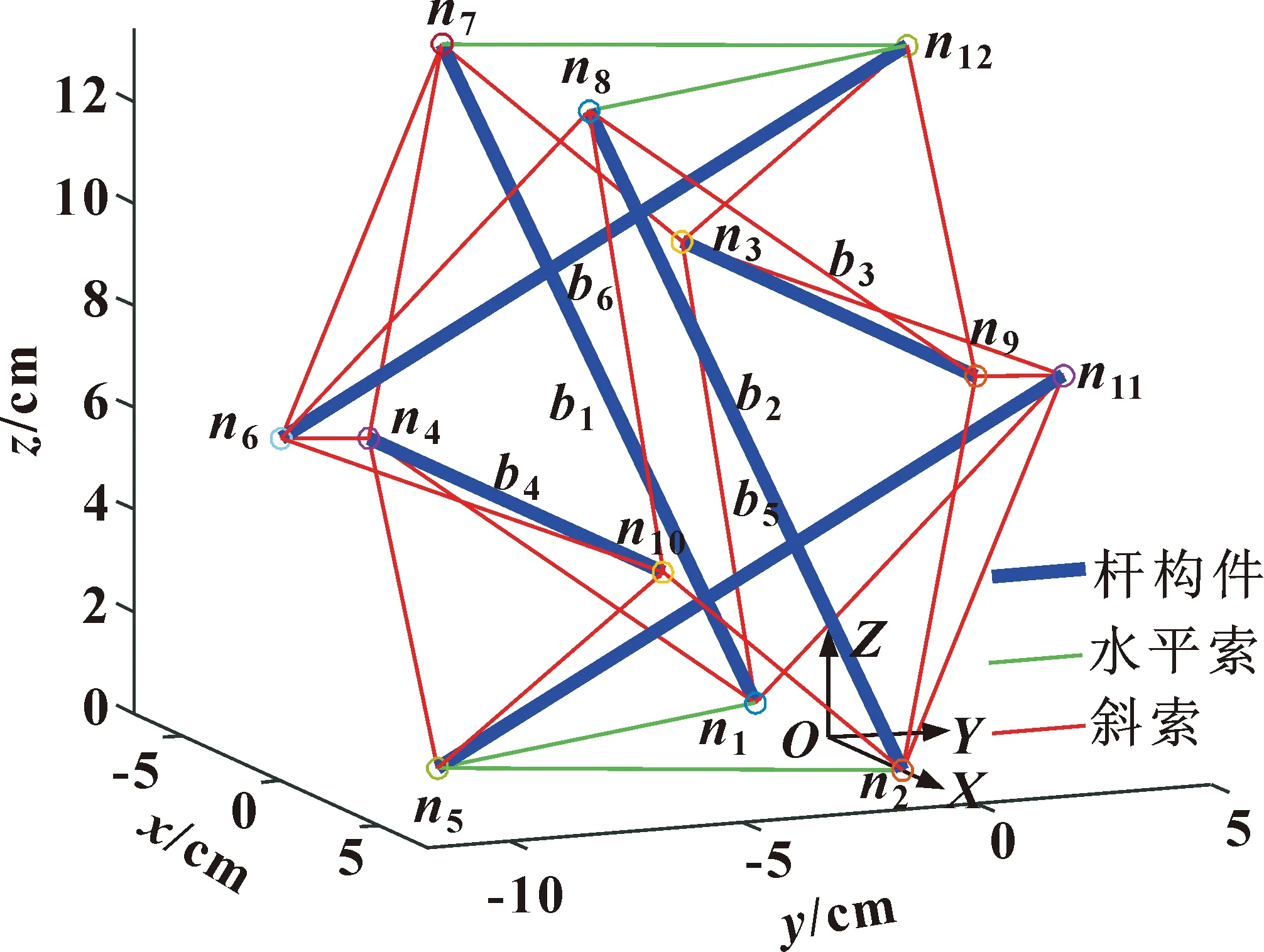
圖8 桿索構件分布Fig.8 Distribution of bars and cables
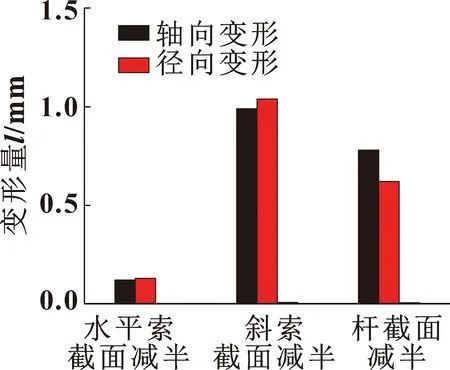
圖9 不同結構參數下節點最大位移量Fig.9 Maximum displacement of nodes under different structural parameters
在軸向載荷下,改變同類構件的橫截面積,結構的軸向位移、徑向位移都存在一定幅度的變化,而扭轉角變化并不明顯。如圖9所示,其中,斜索截面積減半的影響最為明顯,軸向、徑向變形量分別為0.99 mm和1.04 mm,增幅最明顯,在18%左右;桿截面積減半時,軸向、徑向變化量分別為0.78 mm和0.62 mm,增幅較明顯,在12%左右;水平索截面積減半,軸向、徑向變化量分別為0.12 mm和0.13 mm,增幅不太明顯,在2%左右。因此,在構件的彈性變形范圍內,改變六桿張拉整體結構的構件截面尺寸對結構力學性能的影響較小。
2.6 影響因素敏感度分析
為了便于分析六桿張拉整體中結構參數對力學性能的影響,此節進行了影響因素敏感度分析。
通過因變量的相對變化與自變量的相對變化之比,定義六桿張拉整體結構各類變形量fi對結構參數xi的敏感度。
(7)
式中:fi為六桿張拉整體結構的某一變形量;xi為六桿張拉整體結構的某一結構參數;Δxi為結構參數的變化量;Δfi為結構參數變化引起的位移變化。
通過式(7)計算得出了各參數變化對六桿張拉整體結構變形量的敏感度,如圖10所示。可以看出:軸向、徑向變形量對預應力和載荷敏感度較高,對水平索面積敏感度則較低,扭轉載荷對軸向變形量的正敏感度最高。通過以上的分析可知:在載荷不變的情況下,主動提高拉索預應力和增加斜索截面面積是改善六桿張拉整體結構力學性能的有效措施。

圖10 節點最大位移量對結構參數的敏感度Fig.10 Sensitivity of maximum displacement to structural parameters
2.7 六桿張拉整體機器人樣機實驗驗證
根據前面的構型設計,此節設計了六桿張拉整體機器人的控制系統,研制了樣機,進行了翻滾實驗,以驗證前面構型的合理性。六桿張拉整體機器人樣機如圖11所示,機器人樣機在靜止狀態下基本維持六桿張拉整體結構的形狀,沒有明顯的變形。

圖11 六桿張拉整體機器人實物模型Fig.11 Six-bar tensegrity robot prototype:(a)front view;(b)top view
機器人樣機中的桿構件為微型推桿電機,桿長為300 mm;索構件為無彈性的凱夫拉繩和拉簧,長度為183.7 mm,平行兩桿間的距離為150 mm;樣機在靜止狀態下是幾何穩定的,證明了構件之間參數關系的正確性。
實物模型搭建后,可驅動推桿電機使桿伸縮,六桿張拉整體機器人的重心發生偏移,以達到從開放三角形到封閉三角形的翻滾運動。文中對機器人樣機以開放三角形著地的方式進行了翻滾實驗,驗證六桿張拉整體機器人結構的可動性,如圖12所示。
通過前面結構設計對樣機進行了研制,證明了結構參數的可行性,隨后對機器人樣機進行了翻滾實驗,驗證了六桿張拉整體機器人的可動性。該實驗可作為后續機器人運動學、動力學及軌跡規劃等研究開展的基礎。
3 結論
(1)通過節點坐標矩陣和構件連接矩陣,建立了六桿張拉整體結構的矢量矩陣,確定了六桿張拉整體結構數學模型與結構參數之間的函數關系。
(2)通過ANSYS建立了六桿張拉整體結構的非線性力學模型,得到了不同載荷、初應變及結構參數下結構的變形規律,其中扭轉載荷對結構非線性力學性能影響較大。
(3)進行了結構參數敏感度分析,結果表明:六桿張拉整體結構的非線性力學性能隨著預應力和載荷的增加而增加,隨著桿截面減少而減小,隨著索截面減少而減少,其中預應力對六桿張拉整體結構非線性力學性能的提高較為明顯。該結果對六桿張拉整機器人力學性能的提升具有較高的應用價值。
(4)搭建了六桿張拉整體機器人樣機模型,進行了機器人樣機的翻滾運動測試,為后續機器人運動學、動力學及軌跡規劃提供了參考。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50