乘員約束系統仿真假人姿態自適應APP 開發應用
2023-12-09 08:07:20王國鋒姚再起廖慧紅
機電產品開發與創新 2023年6期
關鍵詞:模型
姜 迪, 沈 輝, 王國鋒, 姚再起, 廖慧紅
(吉利汽車研究院(寧波)有限公司, 浙江 寧波 315336)
0 引言
隨著汽車保有量的增加, 人們對汽車的安全性提出了越來越高的要求[1]。汽車的安全系統通常從主動安全和被動安全兩方面考慮, 其中汽車主動安全技術指發生事故之前,防止汽車發生事故采取的措施[2-7]。汽車被動安全技術主要為了在發生事故時最大程度的降低車內乘員受到傷害及行人在碰撞時發生的傷害[8]。鑒于汽車被動安全技術涉及范圍廣,通常對汽車被動安全采取實驗的方法,隨著計算機技術的發展, 計算機仿真的方法也開始被各大主機廠和零配件廠使用。考慮到實驗方法的成本較高,試驗周期長,且實驗的結果存在一定的不穩定性,仿真方法在汽車被動安全方面起到了越來越重要的作用[9]。在涉及假人的碰撞仿真工況上, 按法規要求擺放假人是必不可少的步驟。 需要反復調整假人軀干、上臂、下臂、手腕、大腿、小腿、腳部角度,使其姿態滿足法規要求。 該過程繁瑣且耗時,反復調整假人的姿態使其符合法規要求,假人姿態調整合規是仿真精度的保證。 由于將假人手部調整到握住方向盤的操作比較麻煩, 該過程需要調整假人手部姿態,使手部握住方向盤,并進行手指回彈計算。 在實際仿真過程中, 通常為了降低假人姿態調整時操作的復雜程度,會將假人手部放置于方向盤兩側。 但在實際開車時,由于手部握住方向盤,并支撐在方向盤上,尤其對假人往前沖時有一定抵御作用。 因此,為提高計算精度,考慮手部握住方向盤是非常必要的。 在假人姿態擺放合規后,需要假人對座椅進行預壓操作,該操作保證了后續仿真得以順利進行。 由于預壓計算需要先將假人移動到與座椅不干涉, 仿真工程師們一般將假人移動一個足夠大的距離,再進行下一步接觸,邊界,控制卡片的設置。 這導致了在計算過程中產生了大量的無效計算時間。 因此,可以智能調整假人和座椅之前的距離是非常有必要的。 目前,國內外學者對乘員約束系統仿真中假人模型自動擺放的研究相對較少。
本文基于Python 對ANSA 進行二次開發, 實現了某型號假人自動移動到指定位置、姿態自適應調整,假人手指回彈,假人預壓座椅的工具開發。 通過該APP 可自動導入假人模型,并將假人移動到指定位置,自動調整假人姿態,并生成手部回彈計算文件,導入計算后的結果文件可實現假人最終的姿態調整, 并輸出姿態合規的假人文件。通過導入第一步生成的假人文件和提供的座椅文件,可智能地調整假人和座椅間距,自動實現假人預壓座椅。通過本APP 可顯著降低操作復雜程度, 規范操作步驟,縮短了建模時間及計算求解時間,提高了分析精度。
1 開發背景
為降低交通事故中車內乘員的傷害, 需要采取正確的汽車乘員約束系統[10-11]。約束系統的驗證通常有實驗方法和仿真方法。 對于實驗的方法,在進行碰撞試驗前,首先需要對假人實體模型按法規要求擺放,如圖1 所示。對于仿真方法,在有限元模型搭建過程中,涉及到假人的導入,并根據法規要求將假人擺放到合適的位置,調整假人的姿態。 其中假人手部需要進行回彈分析,從而保證模型的計算精度。 假人擺放完畢后,還需要假人對座椅進行預壓計算。
針對有限元分析方法,由于汽車乘員約束系統的分析都涉及到假人擺放,而擺放過程較為繁瑣,轉動上臂會影響下臂和手腕的前后、左右移動,轉動大腿會影響小腿、腳部前后,左右的移動,因此需要反復調整假人四肢,擺放時間受工程師熟練程度影響。 同時,假人擺放的姿態和工程師習慣有很大關系,會出現假人擺放姿態不夠規范的情況。 在座椅預壓環節,工程師為了簡化操作,會將座椅與假人之間的間隙調節的足夠大,降低操作難度。 該行為不會影響計算精度,但會產生大量的無效計算時間,嚴重浪費計算資源。因此,開發一款自動化假人擺放工具,簡化模型處理過程,減少無效計算時間是非常有必要的。

2 假人姿態自適應程序開發
2.1 假人姿態自適應程序開發思路
本文開發了一套乘員保護假人姿態自適應擺放工具。該工具分為兩部分,第一部分為假人姿態自適應APP,實現假人姿態的自動擺放,考慮手指回彈,生成符合法規的假人模型文件。第二部分為假人座椅預壓APP,實現假人自動移動到距座椅很近的位置,減少無效計算時間,生成預壓后的座椅文件。
其中假人姿態自適應程序開發流程如圖2 所示。 通過輸入H 點坐標或者點選指定位置確定假人的位置,將自動導入假人模型到指定位置。 通過依次選擇方向盤的單元,歇腳板的單元,油門踏板的單元,地板的單元,計算出假人的胳膊,手,腿,腳轉動角度,并進行旋轉。 若經過自動擺放,假人姿態仍不滿足要求,用戶可通過指定按鈕對假人的手,腳進行微調使其滿足要求。如果方向盤與手接觸區域含有多個PID, 通過選方向盤上屬性不同的單元獲得方向盤區域。 設置完畢后會自動設置接觸,邊界,并導出手指回彈的計算文件, 經過求解得到計算后手指的坐標文件。 導入該文件即可輸出手指經過回彈的假人模型文件。
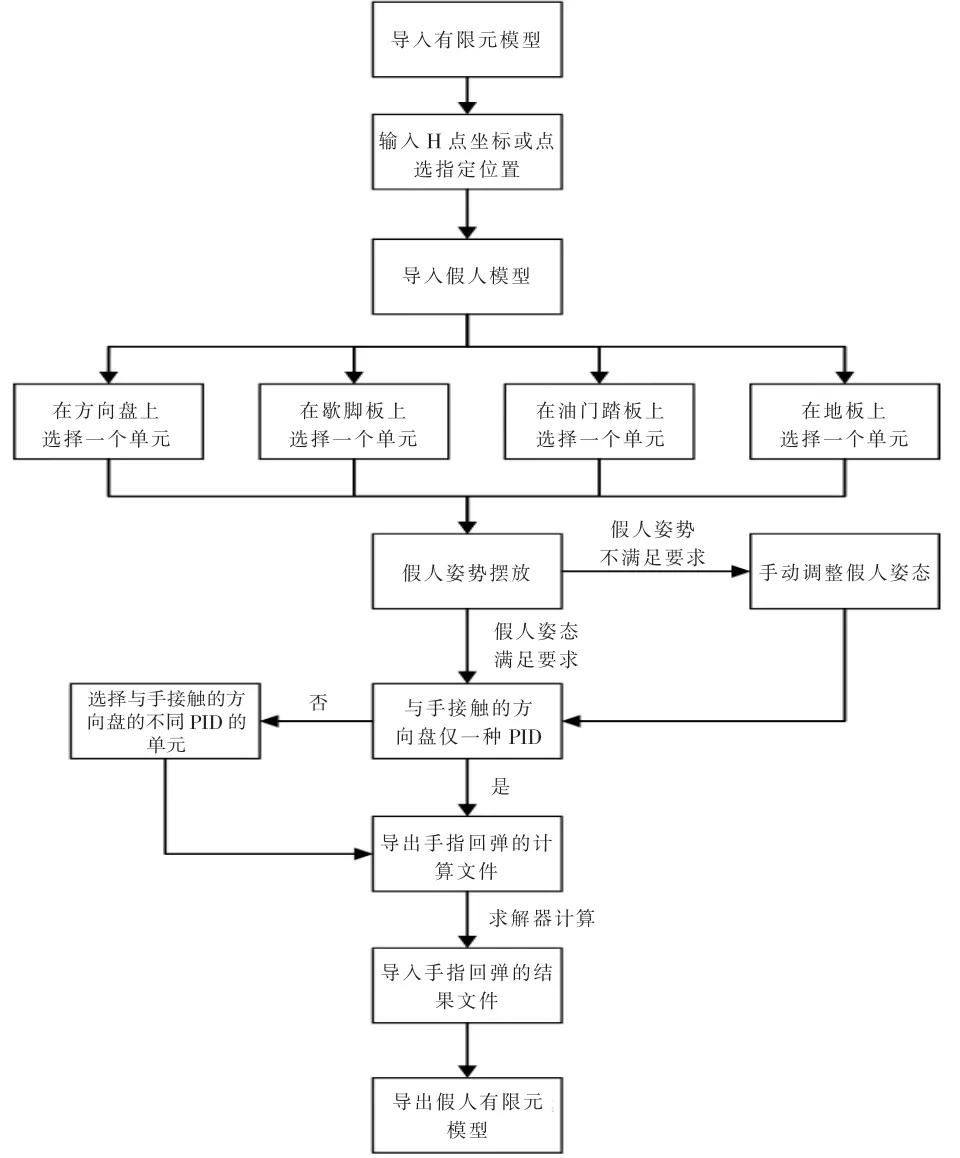
圖2 假人姿態自適應程序開發流程Fig.2 Dummy posture adaptive program development process
2.2 假人預壓座椅程序開發思路
對于假人臀部預壓座椅程序開發流程如圖3 所示。分別導入擺放好姿態的假人有限元模型以及座椅的有限元模型,選擇輸出路徑,可自動刪減假人模型,提取假人可能與座椅接觸的部分,生成一個剛性體,自動生成邊界條件,載荷及接觸,并在指定路徑下生成假人預壓座椅計算文件,通過求解計算,得到座椅預壓后的坐標文件,導入座椅預壓后的坐標文件, 即可輸出預壓后的座椅有限元模型。
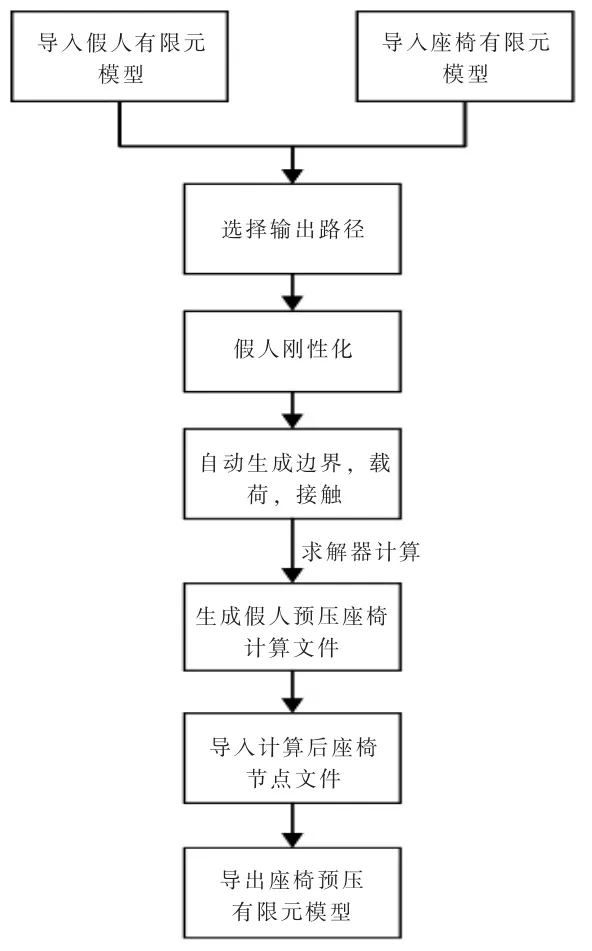
圖3 假人預壓座椅程序開發流程Fig.3 Dummy preloaded seat program development process
3 關鍵技術
3.1 假人手部移動到指定位置
假人上臂的長度,下臂和手作為一個整體的長度,手到肩膀的距離,這三個線段組成了一個三角形。如圖4 所示,假設假人坐在指定位置時,它的上臂長度為OA 邊,下臂和手總長度為AB 邊,手到肩膀距離為BO 邊。 當假人擺放合適時,它的上臂長度為OA"邊,下臂和手總長度為A"B"邊,手到肩膀的距離為B"O 邊。由于OA"、A"B"和B"O 已知,可以得到∠OA"B"、∠A"B"O 和∠A"OB",自動調整∠OAB、∠ABO 和∠AOB,使∠OA"B"=∠OAB,∠A"B"O=∠ABO,∠A"OB"=∠AOB,既而得到ΔOA′B′。 ΔOA"B"≌ΔOA′B′。 再將ΔOA′B′繞O 點旋轉到ΔOA"B",得到初步手臂和手的位置。 再通過自動計算手部指定節點到方向盤指定 位 置X 向,Y向,Z 向的距離使手部位置進一步調整, 從而使假人手部姿態滿足要求。
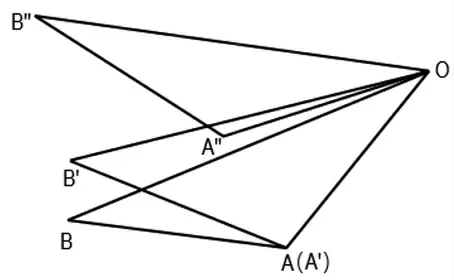
圖4 假人手臂簡化圖Fig.4 Simplified dummy arm
考慮到方向盤的造型存在差異以及手動選擇方向盤上的單元位置存在偏差,本APP 提供了手動微調假人手部位置的按鈕。 通過在APP 界面中選擇需要移動的方向,填入移動距離即可實現在該方向上的移動。
3.2 假人腳部移動到指定位置
通過選擇歇腳板的單元確定假人的大腿向外轉動的角度,以左腳為例,具體操作如圖5 所示,DE 為假人坐在指定位置時大腿初始狀態在XY 平面上的投影,E′為歇腳板單元在XY 平面上投影的位置, 連接E′、E、D 三點,組成一個三角形, 從而可以計算出大腿向外轉動的角度∠E′DE。 調整腳長的方向與整車坐標系下X 方向平行,通過限定鞋尖和鞋跟與地板間的距離自動調整小腿與腳的旋轉角度。

圖5 假人腿部投影簡化圖Fig.5 Simplified projection of dummy leg
考慮到選擇單元位置的差異性, 本APP 提供了手動微調假人腳位置的按鈕。 通過在APP 界面中選擇需要移動的方向, 填入移動距離即可實現在該方向上的移動。
3.3 假人預壓座椅
考慮到縮減仿真計算時間,在假人與座椅預壓的過程中, 需要將擺放好的假人移動到與座椅接近且不接觸的狀態, 常規操作是將假人移動一定距離, 該距離保證假人與座椅不干涉且適用于各種車型,因此移動距離需足夠的大,后進行預壓計算,從而保證假人對座椅的順利預壓, 該過程增加了大量的無效計算時間,浪費計算資源。
本APP 將自動檢查假人與座椅之間是否發生干涉,若發生干涉, 將假人沿Z 向及X 向移動一個較小的距離d。循環這個過程,直至假人與座椅不存在干涉,然后沿著Z 向及X 向反向移動距離d/2,此時假人與座椅若存在干涉會繼續沿Z 向及X 向正向移動d/4,若不再干涉則繼續反向移動d/4,以此類推,直至再次移動的距離小于設定值且假人與座椅無干涉, 則停止假人移動并計算總移動距離,保存在后臺數據庫中,生成相應的數據曲線,從而省去了不必要的計算時間。
4 程序界面效果
4.1 假人姿態自適應程序界面
假人姿態自適應APP 界面如圖6 所示。 用戶需要將H 點的坐標輸入到指定框中, 或者通過點選的方式自動在框中得到坐標。通過選擇方向盤上一個單元(這里選擇假人左手握住方向盤時虎口與方向盤最近的殼單元),再依次選擇歇腳板上一個單元,油門踏板上一個單元,車內地板上一個單元,即可得到調整好姿態的假人。如果用戶對假人局部姿態不滿意,可以通過指定按鈕微調手和腳,使手或者腳可以前后左右移動,直至假人模型滿足要求,如圖7 所示。 若假人手部與方向盤接觸位置有不止一種PID,可以通過點選不同PID 的單元得到所有方向盤上與手接觸的單元。 選擇輸出路徑,后臺自動生成邊界條件,接觸, 即可得到假人手指回彈的計算文件。 通過求解計算,得到手指回彈后的坐標,再次導入手指回彈后的坐標文件,得到符合要求的假人有限元模型文件。
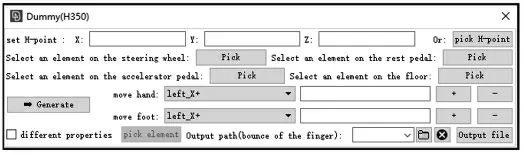
圖6 假人姿態自適應程序界面Fig.6 Dummy pose adaptive program interface

圖7 擺放后的假人Fig.7 The dummy after placement
4.2 假 人 預 壓 座 椅程序界面
假人預壓座椅APP 界 面 如 圖8 所示。 用戶需要輸入假人有限元模型,輸入座椅部分的有限元模型, 選擇輸出路徑,程序后臺自動生成邊界,載荷,接觸,最終輸出假人預壓座椅的計算文件。通過求解,得到座椅結果文件。通過輸入計算后的座椅節點坐標,可得到預壓后座椅的有限元模型。假人預壓座椅APP 的開發可以在極短時間內生成座椅預壓文件, 預壓座椅程序界面如圖8 所示。
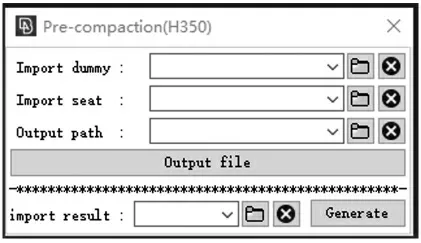
圖8 假人預壓座椅程序界面Fig.8 Dummy preloaded seat program interface
5 結論
本文基于ANSA 開發了一套乘員約束系統仿真假人姿態自適應的自動化工具。 本APP 包含兩部分,即假人姿態自適應和假人預壓座椅。 使用本APP 可在5 分鐘內(除去手指回彈計算的求解時間)完成假人擺放,在4 分鐘內(除去座椅預計算的求解時間)完成假人座椅預壓。該APP 明顯降低操作復雜程度, 并且使分析規范化,提升假人擺放及座椅預壓的建模效率達70%, 減少不必要的計算資源浪費,縮短建模和求解時間。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
