基于多尺度殘差網(wǎng)絡(luò)的域適應(yīng)軸承故障識(shí)別方法*
2023-12-20 12:38:58趙志宏孫美玲竇廣鑒
機(jī)電工程 2023年12期
趙志宏,孫美玲,竇廣鑒
(1.石家莊鐵道大學(xué) 信息科學(xué)與技術(shù)學(xué)院,河北 石家莊 050043;2.石家莊鐵道大學(xué) 省部共建交通工程結(jié)構(gòu)力學(xué)行為與系統(tǒng)安全國(guó)家重點(diǎn)實(shí)驗(yàn)室,河北 石家莊 050043)
0 引 言
在現(xiàn)代工業(yè)過(guò)程中,機(jī)械設(shè)備日益向自動(dòng)化和大型化方向發(fā)展,機(jī)械設(shè)備的故障診斷越來(lái)越受到重視。
滾動(dòng)軸承是旋轉(zhuǎn)機(jī)械的核心部件,其不同載荷下、不同位置、不同直徑的故障,可能會(huì)對(duì)機(jī)械設(shè)備的性能、穩(wěn)定性和壽命產(chǎn)生巨大的影響[1]。因此,對(duì)軸承進(jìn)行故障診斷具有重要的意義。
近些年,軸承故障診斷逐漸成為一大研究熱點(diǎn),有大量學(xué)者針對(duì)軸承故障診斷展開了研究,并且成果頗豐。基于機(jī)器學(xué)習(xí)的故障診斷方法主要包括支持向量機(jī)(support vector machine, SVM)、反向傳播(back propagation,BP)神經(jīng)網(wǎng)絡(luò)、人工神經(jīng)網(wǎng)絡(luò)(artificial neural network, ANN)以及概率神經(jīng)網(wǎng)絡(luò)等。雖然這些方法取得了不錯(cuò)的結(jié)果,但是特征提取過(guò)程通常依賴于人工經(jīng)驗(yàn)和專家知識(shí),而且淺層神經(jīng)網(wǎng)絡(luò)無(wú)法有效提取出一些微小故障特征。
深度學(xué)習(xí)(deep learning, DL)[2]可以采用逐層貪婪學(xué)習(xí)機(jī)制,從原始數(shù)據(jù)中自動(dòng)提取深層次特征[3],很好地解決了上述問(wèn)題。丁雪等人[4]將多尺度卷積神經(jīng)網(wǎng)絡(luò)和注意力機(jī)制相結(jié)合,更加充分地提取了特征,實(shí)驗(yàn)表明該模型具有較強(qiáng)的魯棒性。楊慧等人[5]使用雙向門控循環(huán)神經(jīng)網(wǎng)絡(luò)(bidirectional gated recurrent neural network,BiGRU)和自注意力機(jī)制,對(duì)滾動(dòng)軸承進(jìn)行了故障診斷。趙志宏等人[6]設(shè)計(jì)了雙向長(zhǎng)短詞記憶模型(bi-directional long short-term memory, BiLSTM),該網(wǎng)絡(luò)可自動(dòng)提取軸承的原始振動(dòng)信號(hào)特征,從而進(jìn)行軸承故障診斷。趙凱輝等人[7]設(shè)計(jì)了Inception模型,并提取了多尺度特征信息,設(shè)計(jì)了BLSTM網(wǎng)絡(luò),賦予特征信息時(shí)間依賴性,得到了較高的故障診斷精度。ZHANG Jiang-quan等人[8]將軸承的原始振動(dòng)數(shù)據(jù)轉(zhuǎn)換為二維灰度圖像,將其作為卷積神經(jīng)網(wǎng)絡(luò)的輸入,從而成功地進(jìn)行了軸承故障診斷。
這些傳統(tǒng)深度學(xué)習(xí)方法要求訓(xùn)練數(shù)據(jù)和測(cè)試數(shù)據(jù)的分布是相同的,并且要有足夠的帶標(biāo)簽訓(xùn)練數(shù)據(jù)對(duì)模型進(jìn)行訓(xùn)練;而在實(shí)際生產(chǎn)中,數(shù)據(jù)的采集通常是在不同轉(zhuǎn)速和不同負(fù)載下進(jìn)行的,因此,很難獲得分布相同的數(shù)據(jù)。
遷移學(xué)習(xí)(TL)旨在利用源域的先驗(yàn)知識(shí)以增強(qiáng)模型在目標(biāo)域的性能[9],其可以很好地解決以上問(wèn)題,在自然語(yǔ)言處理、計(jì)算機(jī)視覺(jué)等許多研究領(lǐng)域都有很好的應(yīng)用效果[10]。域適應(yīng)方法是遷移學(xué)習(xí)中一種常見(jiàn)的方法,其主要思想是首先利用深度神經(jīng)網(wǎng)絡(luò)提取故障特征,然后加入自適應(yīng)層來(lái)減小源域和目標(biāo)域之間的特征分布距離[11]。因此,精確測(cè)量源域和目標(biāo)域的特征分布距離并使分布距離最小變得極為重要。
沈長(zhǎng)青等人[12]利用ResNet50網(wǎng)絡(luò)和多尺度特征提取器,提取了源域和目標(biāo)域特征,通過(guò)計(jì)算它們的最大均值差異來(lái)學(xué)習(xí)域不變特征,從而得到泛化性能較好的故障診斷模型。雷亞國(guó)等人[13]使用堆疊多級(jí)殘差單元的殘差網(wǎng)絡(luò)提取特征,將最大最小距離(max min distance,MMD)和偽標(biāo)記學(xué)習(xí)相結(jié)合來(lái)減小域間分布差異,得到了較好的故障診斷效果。SHAO Jia-jie等人[14]使用多內(nèi)核MMD (multiple-kernel MMD, MK-MMD)和域混淆函數(shù)作為損失函數(shù),進(jìn)行了遷移學(xué)習(xí)軸承故障診斷。LIU Yong-zhi等人[15]使用Wasserstein距離作為度量方法來(lái)適應(yīng)源域和目標(biāo)域,最終進(jìn)行了變工況下的軸承故障診斷。SUN Bao-chen等人[16]提出了一種簡(jiǎn)單且高效的無(wú)監(jiān)督域適應(yīng)方法-相關(guān)對(duì)齊(CORrelation alignment, CORAL),該方法使用線性變換對(duì)齊目標(biāo)域和源域特征的協(xié)方差,不需要任何目標(biāo)標(biāo)簽進(jìn)行遷移學(xué)習(xí);但是該方法依賴線性變換,不是端到端的訓(xùn)練。因此,SUN Bao-chen等人[17]對(duì)CORAL算法進(jìn)行了拓展,使用非線性變換,提出了Deep CORAL,并將其應(yīng)用到深度神經(jīng)網(wǎng)絡(luò)中。
筆者針對(duì)不同工況下滾動(dòng)軸承振動(dòng)信號(hào)數(shù)據(jù)分布差異大、故障特征提取不全面、有標(biāo)簽數(shù)據(jù)獲取困難等問(wèn)題,對(duì)特征提取網(wǎng)絡(luò)和域適應(yīng)度量方法進(jìn)行改進(jìn),提出一種基于多尺度殘差網(wǎng)絡(luò)的域適應(yīng)軸承故障識(shí)別方法。
筆者在殘差網(wǎng)絡(luò)中加入多尺度殘差塊,并采用空洞卷積來(lái)增大感受野,從而提取出多個(gè)不同尺度的特征信息,并避免梯度消失和梯度爆炸問(wèn)題;此外,對(duì)CORAL進(jìn)行改進(jìn),提出一種新的域適應(yīng)方法-對(duì)數(shù)相關(guān)對(duì)齊(logCORAL),使用logCORAL進(jìn)行源域和目標(biāo)域之間的特征分布對(duì)齊,提取域不變特征。
1 相關(guān)理論
1.1 域適應(yīng)
域適應(yīng)(DA)是遷移學(xué)習(xí)中一種常用方法,用于源域和目標(biāo)域任務(wù)相同但是數(shù)據(jù)分布不同的情況。其基本思想是在保持源域任務(wù)精度的前提下,縮小表示空間上源域與目標(biāo)域的特征分布距離。
域適應(yīng)示意圖如圖1所示。
1.2 殘差網(wǎng)絡(luò)
深度神經(jīng)網(wǎng)絡(luò)模型通常會(huì)加入大量的卷積層和池化層,使模型擁有大量的參數(shù),隨著網(wǎng)絡(luò)層的增加會(huì)出現(xiàn)網(wǎng)絡(luò)退化、梯度爆炸等問(wèn)題。殘差網(wǎng)絡(luò)(residual neural network,ResNet)[18]采用跳躍連接的方法,可以避免這些問(wèn)題。
淺層殘差網(wǎng)絡(luò)中的殘差塊結(jié)構(gòu)如圖2所示。
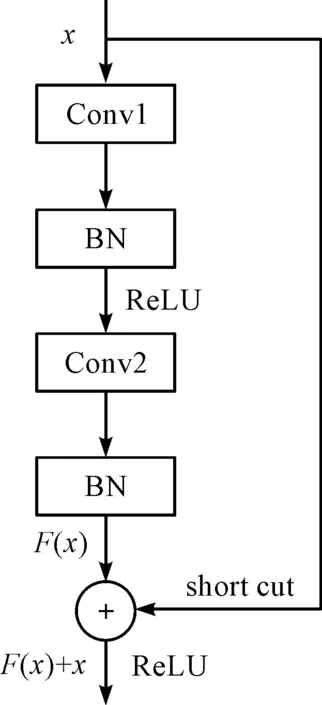
圖2 殘差塊結(jié)構(gòu)圖Fig.2 Residual block structure diagram
殘差塊由short cut、卷積層(Conv)、批歸一化層(BN)和ReLU激活函數(shù)組成。其中,x是殘差塊的輸入。設(shè)F(x)為卷積路徑的非線性函數(shù),則殘差塊的輸出可以用下式來(lái)表示:
y=F(x)+x
(1)
殘差表示為F(x)=y-x,殘差網(wǎng)絡(luò)的訓(xùn)練目標(biāo)是使殘差F(x)的值盡可能為0,進(jìn)而防止隨著網(wǎng)絡(luò)加深而產(chǎn)生精度下降的現(xiàn)象。
1.3 灰度圖像
軸承的灰度圖像只包含亮度信息,可以有效避免模型學(xué)習(xí)到一些不必要的信息,從而提高模型的泛化能力。因此,筆者將軸承振動(dòng)信號(hào)轉(zhuǎn)換為灰度圖像,將其作為故障診斷模型的輸入。
具體的轉(zhuǎn)換方法如下:
步驟1。將提取的軸承一維振動(dòng)信號(hào)樣本轉(zhuǎn)化為L(zhǎng)×L的二維矩陣A,公式如下:
A(e,f)=G(L×(e-1)+f)
(2)
式中:G()為二維矩陣轉(zhuǎn)換函數(shù);A(e,f)(e,f∈(0,L])為轉(zhuǎn)換的矩陣中第e行第f列元素的值。
步驟2。將二維矩陣A轉(zhuǎn)化為灰度圖像D。具體操作是將二維矩陣進(jìn)行歸一化處理,即將其中的值壓縮到(0,1)區(qū)間內(nèi);再乘以255,轉(zhuǎn)化為二維灰度圖像的像素值,公式如下:
(3)
式中:D(e,f)(e,f∈(0,L])為軸承振動(dòng)信號(hào)灰度圖像矩陣中第e行第f列的像素值;max(A)為矩陣A中元素的最大值;min(A)為矩陣A中元素的最小值。
1.4 對(duì)數(shù)相關(guān)對(duì)齊

CORAL損失函數(shù)計(jì)算方式如下:
(4)

CT和CS計(jì)算公式如下:
(5)
(6)
然而大量實(shí)驗(yàn)表明,CORAL在軸承故障診斷中的表現(xiàn)不是很好,不能很好地對(duì)齊源域和目標(biāo)域的特征。所以筆者提出了一種新的域適應(yīng)方法-對(duì)數(shù)相關(guān)對(duì)齊(logCORAL)。
在計(jì)算方面,取對(duì)數(shù)之后求導(dǎo)更加容易,因此反向傳播速度更快,訓(xùn)練速度也會(huì)提高。
logCORAL的損失計(jì)算公式如下:
(7)
2 多尺度殘差網(wǎng)絡(luò)診斷模型
筆者設(shè)計(jì)的故障診斷模型主要包括數(shù)據(jù)預(yù)處理模塊、特征提取模塊和故障識(shí)別模塊。源域和目標(biāo)域之間是參數(shù)共享的。
模型結(jié)構(gòu)圖如圖3所示。

圖3 故障診斷模型結(jié)構(gòu)圖Fig.3 Structure diagram of fault diagnosis model
故障診斷模型包括:
1)數(shù)據(jù)預(yù)處理模塊。在數(shù)據(jù)預(yù)處理模塊中,將軸承故障原始信號(hào)轉(zhuǎn)換為灰度圖像,并將灰度圖像作為模型的輸入;
2)特征提取模塊。特征提取網(wǎng)絡(luò)由卷積層、最大池化層、多尺度殘差塊以及全連接層組成。
特征提取網(wǎng)絡(luò)結(jié)構(gòu)圖如圖4所示。
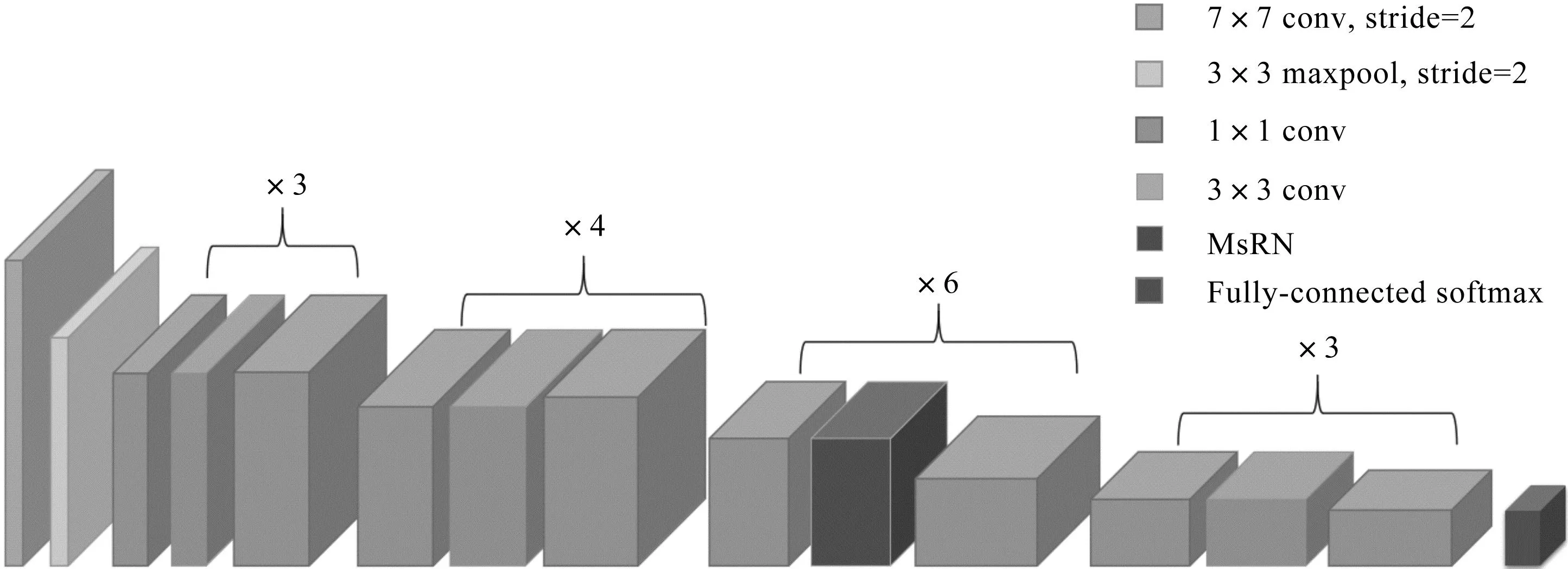
圖4 特征提取網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.4 Feature extraction network structure diagram
由于滾動(dòng)軸承信號(hào)具有非線性且不平穩(wěn)的特點(diǎn),傳統(tǒng)的殘差網(wǎng)絡(luò)內(nèi)部采用單一尺寸的卷積核,對(duì)軸承特征的提取不夠精準(zhǔn)。
為提取更加豐富的特征信息,且有效避免深層網(wǎng)絡(luò)結(jié)構(gòu)的梯度消失問(wèn)題,筆者對(duì)殘差網(wǎng)絡(luò)進(jìn)行了改進(jìn),設(shè)計(jì)一種多尺度殘差塊,使用空洞率為2的空洞卷積來(lái)增大感受野。
多尺度殘差網(wǎng)絡(luò)(MsRN)結(jié)構(gòu)圖如圖5所示。

圖5 MsRN結(jié)構(gòu)圖Fig.5 Structure diagram of MsRN
MsRN內(nèi)部有4個(gè)不同大小的卷積核(2×2,3×3,4×4,4×4),可以從不同尺度的卷積核中學(xué)習(xí)軸承的局部特征;并將每個(gè)卷積核的輸出通過(guò)concat融合在一起,然后傳到殘差結(jié)構(gòu)中的1×1卷積層;
3)故障識(shí)別模塊。筆者使用交叉熵?fù)p失作為源域分類損失,利用logCORAL作為域間損失來(lái)最小化域之間的特征分布差異;將源域的交叉熵?fù)p失和域間損失共同作為訓(xùn)練的損失函數(shù)。
因此,損失函數(shù)J的表示方法如下:
J=Jc+αJd
(8)
式中:J為總的損失函數(shù);Jc為源域分類器上的交叉熵?fù)p失;α為平衡超參數(shù);Jd為logCORAL損失。
筆者使用隨機(jī)梯度下降法(stochastic gradient descent,SGD)作為優(yōu)化器,通過(guò)反向傳播更新參數(shù),當(dāng)達(dá)到一定的迭代次數(shù)時(shí),停止訓(xùn)練,得到此時(shí)的訓(xùn)練模型。
3 故障診斷流程
基于多尺度殘差網(wǎng)絡(luò)域適應(yīng)的軸承故障診斷主要包括以下3個(gè)步驟:
步驟1。采集不同工況下的軸承原始振動(dòng)信號(hào)數(shù)據(jù),將軸承振動(dòng)信號(hào)按照長(zhǎng)度為1 024、步長(zhǎng)為8進(jìn)行抽樣,并將其轉(zhuǎn)化為尺度為32×32的二維灰度圖像,作為源域數(shù)據(jù)和目標(biāo)域數(shù)據(jù)(故障類型有10類,每類有700個(gè)樣本,一共有7 000個(gè)樣本);
步驟2。將預(yù)處理后得到的源域和目標(biāo)域數(shù)據(jù)同時(shí)輸入到特征提取網(wǎng)絡(luò)中,進(jìn)行故障特征提取,將源域特征輸入到分類器中,使得模型在源域數(shù)據(jù)上有較好的精度,由分類器得到源域數(shù)據(jù)的交叉熵?fù)p失(cross entropy)。利用域適應(yīng)方法對(duì)提取出的兩個(gè)域的特征進(jìn)行特征分布對(duì)齊,這里的域適應(yīng)方法使用的是logCORAL。訓(xùn)練中總的損失函數(shù)J的表示方法如式(8)所示;
步驟3。將目標(biāo)域測(cè)試樣本輸入到已經(jīng)訓(xùn)練好的故障診斷模型中,得到模型最終的分類精度。
故障診斷流程圖如圖6所示。
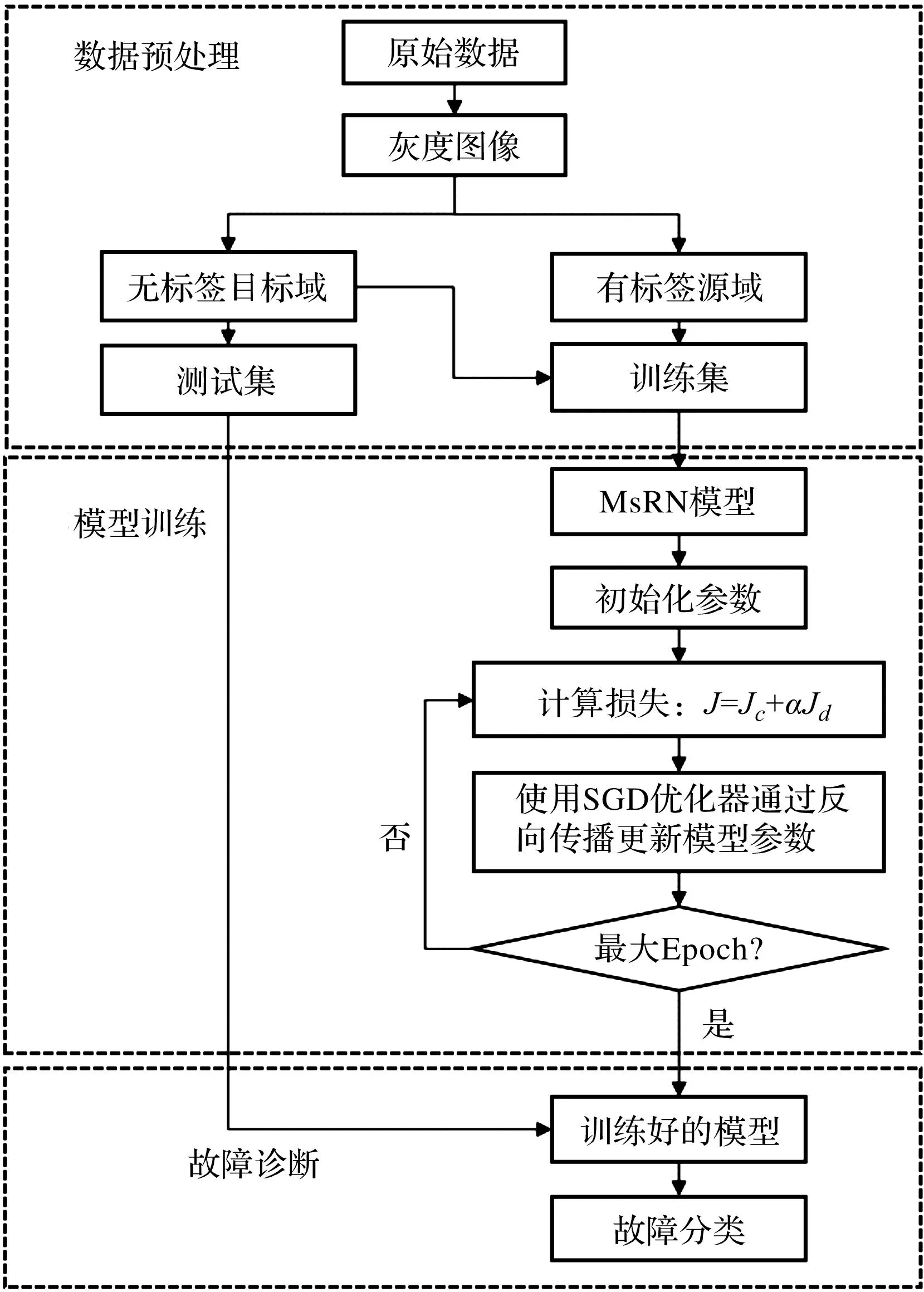
圖6 故障診斷流程圖Fig.6 Fault diagnosis flowchart
4 實(shí)驗(yàn)及結(jié)果分析
4.1 故障診斷數(shù)據(jù)集
筆者選用CWRU軸承公開數(shù)據(jù)集進(jìn)行變工況下的遷移實(shí)驗(yàn),并與其他方法進(jìn)行對(duì)比實(shí)驗(yàn)。
CWRU軸承數(shù)據(jù)集的試驗(yàn)臺(tái)如圖7所示。

圖7 美國(guó)凱斯西儲(chǔ)大學(xué)軸承試驗(yàn)臺(tái)Fig.7 Bearing test bench of CWRU
軸承有4種狀態(tài),分別為內(nèi)圈故障(IRF)、外圈故障(ORF)、滾子故障(RF)和正常狀態(tài)(N)。采樣頻率為12 kHz。每種故障類型存在0.533 4 mm,0.355 6 mm和0.177 8 mm這3種不同的損傷直徑,共有10種軸承狀態(tài)。故障數(shù)據(jù)采集自4種不同的負(fù)載條件,分別為0 hp、1 hp、2 hp和3 hp。
軸承實(shí)驗(yàn)運(yùn)行的負(fù)載、轉(zhuǎn)速與工況信息如表1所示。

表1 CWRU數(shù)據(jù)集工況信息
筆者將不同工況視為不同的遷移任務(wù),共進(jìn)行12個(gè)遷移任務(wù)的實(shí)驗(yàn):0 hp→1 hp,0 hp→2 hp,0 hp→3 hp,1 hp→0 hp,1 hp→2 hp,1 hp→3 hp,2 hp→0 hp,2 hp→1 hp,2 hp→3 hp,3 hp→0 hp,3 hp→1 hp,3 hp→2 hp。例如0→1表示源域?yàn)? hp工況下向目標(biāo)域?yàn)? hp下進(jìn)行遷移。
為了更好地突出軸承的特征,減少模型的復(fù)雜度,提高模型的訓(xùn)練速度和準(zhǔn)確度,并且提高模型的泛化能力,筆者對(duì)軸承數(shù)據(jù)集進(jìn)行了預(yù)處理,將其轉(zhuǎn)化為二維灰度圖像。
不同工況軸承振動(dòng)信號(hào)的二維灰度圖如圖8所示。
從圖8可以看出:灰度圖可以將軸承的10種狀態(tài)很好地表現(xiàn)出來(lái)。

圖8 CWRU軸承數(shù)據(jù)的二維灰度圖Fig.8 2D grayscale image of CWRU bearing data
4.2 實(shí)驗(yàn)一:變工況對(duì)比實(shí)驗(yàn)
滾動(dòng)軸承在不同的負(fù)載條件下工作,會(huì)造成振動(dòng)信號(hào)分布不一致。為了驗(yàn)證基于多尺度殘差網(wǎng)絡(luò)域適應(yīng)的軸承故障診斷方法的診斷準(zhǔn)確性以及在不同工況下的遷移學(xué)習(xí)能力,筆者對(duì)其進(jìn)行不同工況條件下的故障診斷實(shí)驗(yàn)。
該實(shí)驗(yàn)使用的軸承振動(dòng)數(shù)據(jù)是在設(shè)備驅(qū)動(dòng)端采集到的。數(shù)據(jù)集的詳細(xì)信息如表2所示。

表2 不同工況下的故障類型
為了驗(yàn)證基于多尺度殘差網(wǎng)絡(luò)域適應(yīng)的軸承故障診斷模型在變工況軸承故障診斷中的性能和優(yōu)勢(shì),筆者將該模型與4種不同的方法進(jìn)行對(duì)比,分別為聯(lián)合分布適應(yīng)模型(joint distribution adaptation, JDA)[19]、CORAL、MMD[20]221以及未使用遷移學(xué)習(xí)的CNN[20]221。
JDA為傳統(tǒng)遷移學(xué)習(xí)方法,通過(guò)將源域和目標(biāo)域數(shù)據(jù)映射到一個(gè)共同的高維再生核希爾伯特空間,以此來(lái)減小兩個(gè)域之間的距離,以此來(lái)進(jìn)行特征對(duì)齊。CORAL使用的特征提取網(wǎng)絡(luò)為MsRN網(wǎng)絡(luò),域適應(yīng)度量方法使用的是交叉熵?fù)p失和CORAL。MMD方法和未使用遷移的CNN方法利用的是文獻(xiàn)[20]的實(shí)驗(yàn)結(jié)果。其中,特征提取網(wǎng)絡(luò)均使用CNN,CNN由5個(gè)卷積層、1個(gè)池化層、2個(gè)全連接層和1個(gè)輸出層組成;此外,前者使用MMD損失來(lái)進(jìn)行領(lǐng)域分布對(duì)齊,后者使用交叉熵?fù)p失作為分類損失。
不同模型12個(gè)遷移任務(wù)的故障診斷準(zhǔn)確率如表3所示。
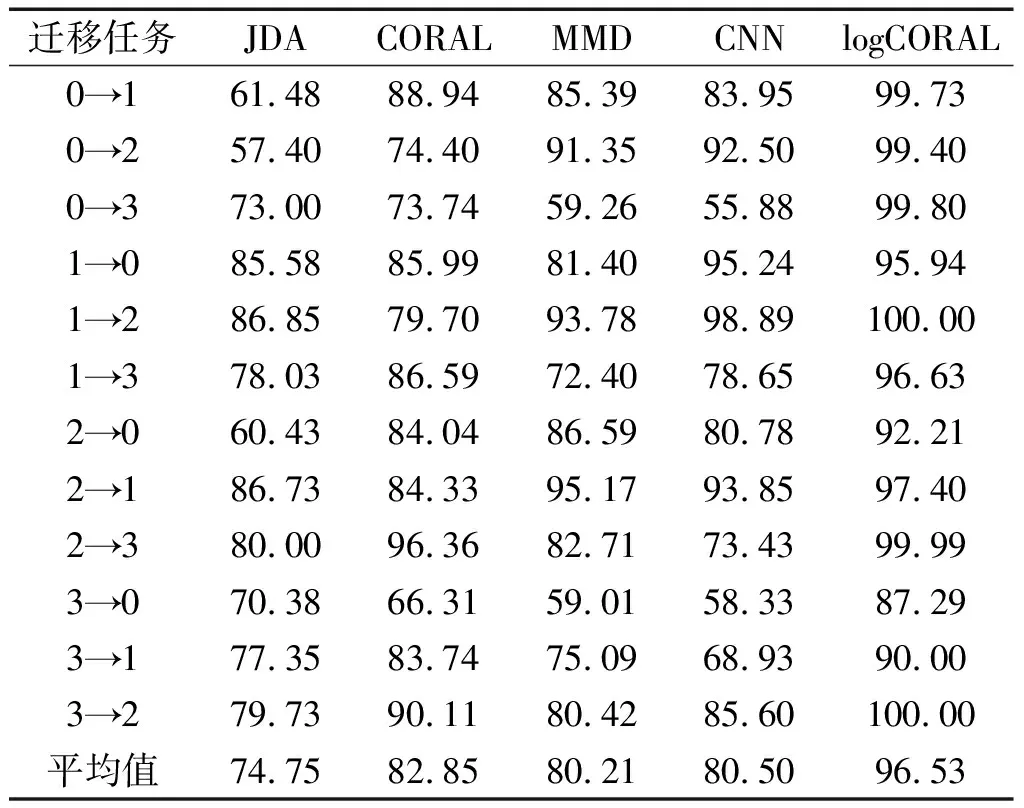
表3 不同方法的變工況故障診斷結(jié)果(%)
從表3可以看出:JDA通過(guò)將軸承的原始振動(dòng)信號(hào)映射到高維空間中,以最小化兩個(gè)域的特征分布距離,遷移效果最差,故障診斷準(zhǔn)確率最低,僅為74.75%。CORAL、MMD、CNN和logCORAL方法使用深度神經(jīng)網(wǎng)絡(luò)從軸承故障樣本中學(xué)習(xí)特征,可以有效避免有用信息數(shù)據(jù)的丟失,所以利用深度學(xué)習(xí)方法提取出的特征要優(yōu)于傳統(tǒng)方法提取出的特征。
另外,與遷移學(xué)習(xí)方法CORAL相比,logCORAL方法在12個(gè)遷移任務(wù)中都得到了更好的診斷效果,準(zhǔn)確率達(dá)到了96.53%,而CORAL方法僅有82.85%的準(zhǔn)確率。說(shuō)明該方法可以比CORAL學(xué)習(xí)到具有更高相關(guān)性的故障特征,最大程度減小了目標(biāo)域和源域的特征分布差異。
以上結(jié)果表明,該模型可以有效地提取出更多有用的特征,并且使得源域和目標(biāo)域之間的分布差異最小,證明了該方法的遷移有效性以及較其他方法的優(yōu)越性。
4.3 實(shí)驗(yàn)二:消融實(shí)驗(yàn)
為了驗(yàn)證整個(gè)模型的有效性以及MsRN和logCORAL各自的必要性,筆者選取0 hp遷移至1 hp、2 hp和1 hp遷移至0 hp、2 hp這6種工況,進(jìn)行變工況下的消融實(shí)驗(yàn)。消融實(shí)驗(yàn)中,筆者將logCORAL-MsRN方法分別與CORAL-MsRN、CORAL-ResNet50、logCORAL-ResNet50等進(jìn)行對(duì)比。
消融實(shí)驗(yàn)故障診斷結(jié)果如表4所示。
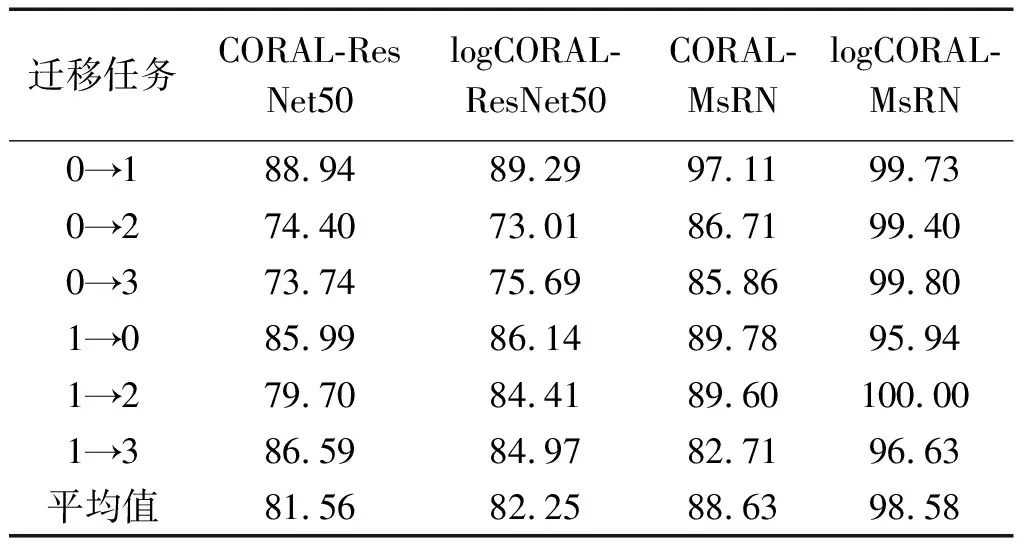
表4 CWRU試驗(yàn)臺(tái)的消融實(shí)驗(yàn)故障診斷結(jié)果(%)
從表4可以看出:CORAL-ResNet50的準(zhǔn)確率最低,為81.65%,說(shuō)明筆者設(shè)計(jì)的模型整體在軸承故障診斷中起了正向作用;logCORAL-ResNet50的準(zhǔn)確率為82.25%,低于logCORAL-MsRN的準(zhǔn)確率98.58%,說(shuō)明筆者采用的多尺度殘差塊可以提取出多個(gè)不同尺度的故障特征,并且引入空洞卷積之后增大了感受野,使得提取出的特征更加全面和豐富,且具有更高的相關(guān)性,有助于特征更好地對(duì)齊;CORAL-MsRN的準(zhǔn)確率為88.63%,低于logCORAL-MsRN,說(shuō)明改進(jìn)后的域適應(yīng)度量方法logCORAL比CORAL的效果要好,可以更有效地減小目標(biāo)域和源域之間的特征分布差異。
總之,通過(guò)消融實(shí)驗(yàn)驗(yàn)證了logCORAL-MsRN方法整體的有效性,以及特征提取網(wǎng)絡(luò)MsRN和域適應(yīng)度量方法logCORAL各自的必要性。
4.4 實(shí)驗(yàn)三:可視化實(shí)驗(yàn)
為了更直觀地驗(yàn)證logCORAL-MsRN方法的優(yōu)越性,筆者隨機(jī)選取1 hp→2 hp遷移任務(wù),利用t-SNE算法對(duì)不同模型進(jìn)行特征可視化。
可視化結(jié)果如圖9所示。
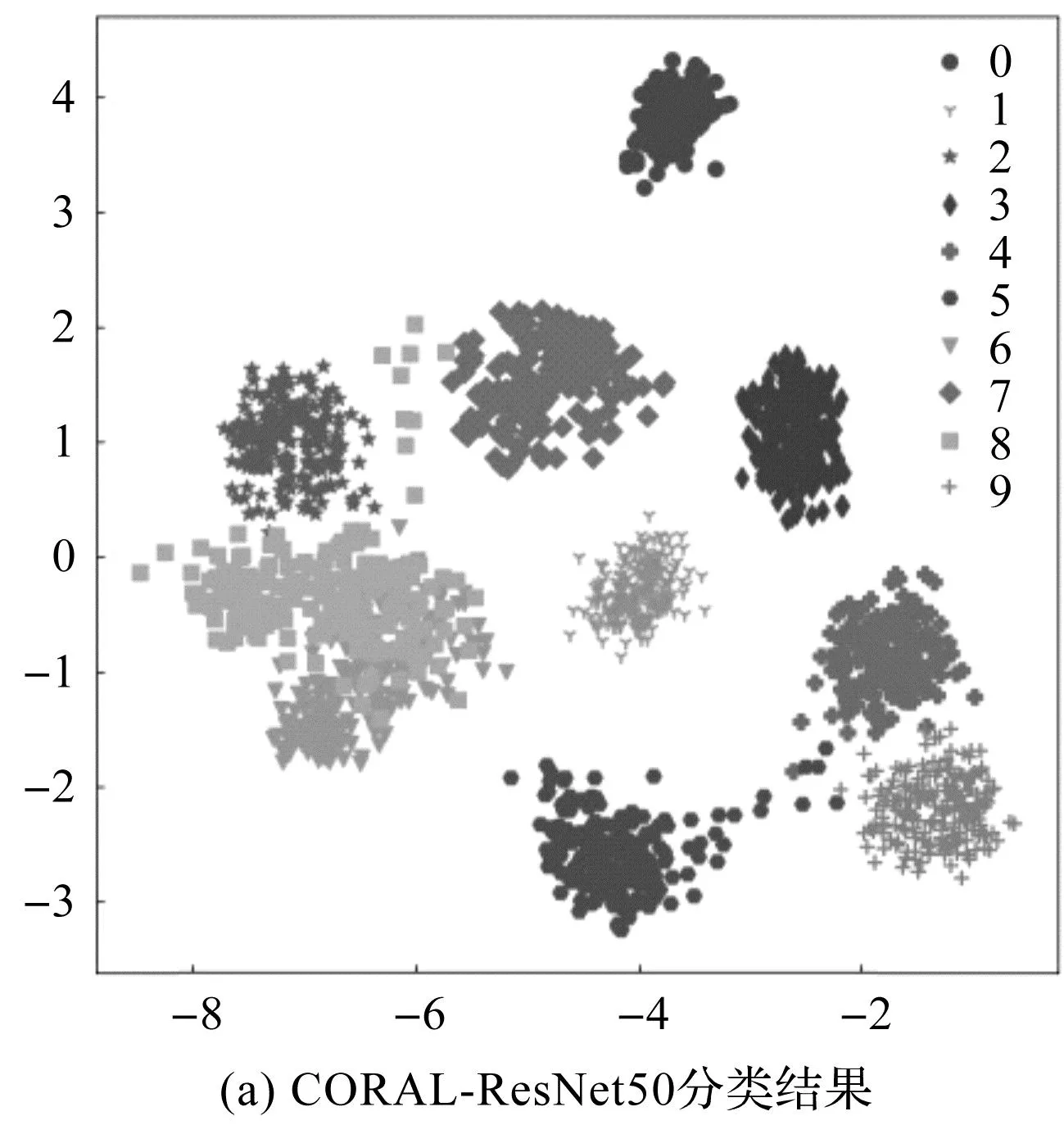





圖9中包含CWRU源域和目標(biāo)域的10種故障類型,角標(biāo)Source表示源域數(shù)據(jù),Target表示目標(biāo)域數(shù)據(jù)。
從圖9(e)、圖9(f)可以看出:使用多尺度殘差網(wǎng)絡(luò)作為特征提取網(wǎng)絡(luò),CORAL作為域適應(yīng)度量方法,無(wú)法將特征準(zhǔn)確分類;并且源域和目標(biāo)域樣本之間距離較遠(yuǎn),無(wú)法很好地進(jìn)行特征對(duì)齊,因此準(zhǔn)確度較低;
但從圖9(g)、圖9(h)可以看出:logCORAL-MsRN方法使用多尺度殘差網(wǎng)絡(luò)作為特征提取網(wǎng)絡(luò),logCORAL作為域適應(yīng)度量方法,經(jīng)過(guò)深度遷移學(xué)習(xí)可以將相同類別的樣本聚合在一起,將不同類別的樣本分散開來(lái);同時(shí),源域和目標(biāo)域樣本之間距離很近但沒(méi)有重合,證明該方法的分類和遷移效果較好,因此準(zhǔn)確度較高。
圖9(a)、圖9(b)使用ResNet50作為特征提取網(wǎng)絡(luò),CORAL作為域適應(yīng)度量方法。圖9(c)、圖9(d)使用ResNet50作為特征提取網(wǎng)絡(luò),logCORAL作為域適應(yīng)度量方法。經(jīng)過(guò)遷移訓(xùn)練之后圖9(c)、圖9(d)相同樣本之間聚合較為緊密,分類效果和特征對(duì)齊效果都比圖9(a)、圖9(b)好[21]。
由于圖9(c)、圖9(d)和圖9(g)、圖9(h)的故障診斷效果明顯優(yōu)于圖9(a)、圖9(b)和圖9(e)、圖9(f),所以證明logCORAL域適應(yīng)度量方法是有效的,而且比CORAL更適合用于域適應(yīng)軸承故障診斷。又因?yàn)閳D9(e)、圖9(f)和圖9(g)、圖9(h)的故障診斷效果比圖9(a)、圖9(b)和圖9(c)、圖9(d)要好,表明多尺度殘差網(wǎng)絡(luò)是有效的,具有強(qiáng)大的特征提取能力,可以充分提取出源域和目標(biāo)域的域不變特征。
5 結(jié)束語(yǔ)
為了提高軸承故障診斷的分類精度,筆者提出了一種基于多尺度殘差網(wǎng)絡(luò)的對(duì)數(shù)相關(guān)對(duì)齊(logCORAL-MsRN)的域適應(yīng)軸承故障識(shí)別方法(模型),并使用CWRU軸承數(shù)據(jù)集對(duì)該方法的有效性進(jìn)行了實(shí)驗(yàn)驗(yàn)證。
研究結(jié)果表明:
1)多尺度殘差網(wǎng)絡(luò)MsRN可以提取出豐富的軸承故障特征,解決了特征提取不充分的問(wèn)題,且有效避免了深層神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)中的梯度消失問(wèn)題;
2)對(duì)CORAL算法進(jìn)行改進(jìn),提出了一種域適應(yīng)方法logCORAL。與CORAL相比,logCORAL可以有效減小域間差異,更好地對(duì)齊源域和目標(biāo)域之間的特征分布;
3)在不同工況條件下,與JDA、CORAL、MMD以及未使用遷移的CNN相比,logCORAL模型遷移故障診斷效果更好,平均準(zhǔn)確率達(dá)到了96.53%。而JDA、CORAL、MMD和CNN的準(zhǔn)確率分別為74.75%、82.85%、80.21%、80.50%。
在后續(xù)的工作中,筆者將在該研究?jī)?nèi)容的基礎(chǔ)上對(duì)跨設(shè)備的軸承故障診斷展開研究,并通過(guò)不斷優(yōu)化模型得到更高的故障診斷準(zhǔn)確率。
猜你喜歡
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:21
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年23期)2014-02-27 14:19:15