光照條件對城市道路騎行者視覺行為的影響
2023-12-27 08:01:14陸妍琳王心悅龔小林
重慶交通大學學報(自然科學版) 2023年12期
,陸妍琳,2,王心悅,龔小林
(1.南京林業大學 汽車與交通工程學院,江蘇 南京210037;2.中汽研汽車檢驗中心(常州)有限公司,江蘇 常州213161)
0 引 言
騎行行為是影響交通安全的重要因素,視覺行為為騎行者獲取道路信息和指導騎行行為提供了重要支撐。低照明條件會妨礙騎行者的視線和對道路信息的獲取,影響騎行者的決策。因此,研究騎行者在不同光照條件下的視覺行為和變化規律,為指導低光照條件下的騎行行為提供理論支持,具有重要意義。
關于光照條件對騎行行為的影響,現有研究大多考慮機動車駕駛員的視覺行為,主要從隧道和城市道路兩個場景進行入手。針對駕駛員在隧道內駕駛的眼動變化,W. QI等[1]探究了隧道環境中受光照影響時駕駛員的眼動和生理特性變化特征;胡英奎等[2]研究表明,除了心理等因素的影響,駕駛員的瞳孔變化主要與亮度有關;閆瑩等[3]分析了隧道群環境光照度對駕駛員瞳孔面積變化的影響規律,提出了隧道群路段“6小段”的劃分方式;針對明暗適應現象,崔洪軍等[4]分析了駕駛員的明暗適應轉換次數與隧道類型和連接段之間的關系。在城市道路照明對機動車駕駛員眼動特性的影響研究中,李瑋晟等[5]針對閃光燈眩光影響,提出了眩光持續時間和眼睛垂直照度的合理范圍;李洪濤等[6]研究了村鎮無信號公路交叉口照明和限速對駕駛員視覺搜索能力的影響,提出限速和照度的理論范圍。以上研究主要針對機動車駕駛員這一主體,分析了駕駛員在不同光照條件影響下的視覺行為。
城市道路中騎行者的眼動受非機動車本身影響,在對騎行行為的研究中:馬艷麗等[7]針對低照度條件在無信號交叉口處對行人與車輛沖突進行了研究;P.VANSTEENKISTE等[8]研究了低等級自行車道對騎行者的眼動影響;胡文斌等[9]分析了自行車騎行者與機動車駕駛員在城市道路上的眼動特征差異。
綜上,關于照度對交通參與者的影響研究,很少考慮騎行者;在騎行行為研究中,很少考慮光照程度的影響。因此,筆者從電動自行車騎行者入手,通過眼動儀實驗,對比分析騎行者在不同光照條件下的視覺特性,為騎行者在低光照條件下安全騎行提供理論支持。
1 實驗方案
1.1 實驗路段和時間
實驗路段選擇江蘇省南京市龍蟠路一處直行路段,龍蟠路為雙向六車道,交通量大,路段有機非分隔帶和行人專用道,夜間路燈間隔距離長,有樹木和道路設施遮擋且照度低。為避免不同溫度對騎行者的影響,實驗的時間為20211211—20220116;為了防止實驗時樣本量過多干擾數據采集,實驗時間選取為非工作日晴天15:00—16:00(下午)、17:00—18:00(傍晚)和19:00—20:00(夜晚),傍晚指同時擁有自然光和路燈雙重照明,夜晚指除路燈外沒有其他照明。
1.2 實驗儀器和人員
實驗選用TobiiGlasses眼動儀(采樣頻率為50 Hz)、ErgoLAB數據分析軟件。
初選42名騎行者完成實驗,在實驗結束后通過觀察每位實驗人員的眼動采樣概率,篩除采樣率低于70%的騎行者,最終選擇30名作為實驗對象。其中,男性17名,女性13名,年齡分布為[18,30]歲12人,(30,43]歲10人,(43,60]歲5人,>60歲3人,矯正視力均為5.0以上,均有較好的電動自行車騎行經驗。
1.3 實驗過程及數據
實驗中實驗對象佩戴眼動儀在實驗路段持續騎行500 m,分別在3種光照條件下騎行兩次,剔除采樣率較低的數據,并重新進行補充實驗,分析數據得到每一時刻的騎行者眼動情況,結果取兩次有效實驗的均值,對實驗所得畫面截取所需片段,獲取騎行者的注視區域、熱點圖、注視、掃視、眨眼以及瞳孔變化等參數。
2 眼動參數分析
通過實驗獲取的數據,得到騎行者的注視、掃視、眨眼和瞳孔變化等眼動參數,其中注視、掃視和眨眼是騎行者持續重復的眼動行為[10],在注視行為中穿插掃視和眨眼行為。注視行為反映了興趣和視認程度,掃視行為反映了信息的獲取能力,眨眼行為反映緊張程度[11]。根據ErgoLab軟件數據輸出,使用描述性統計方法,得到騎行者在白天、傍晚和夜晚3種光照條件下在實驗路段的眼動參數數據。
2.1 注視行為指標分析
眼動研究中注視行為的表征參數主要有注視次數、注視時間和注視視角,騎行者的注視次數代表興趣程度,注視持續時間代表對有效信息的視認程度,注視視角代表視野范圍[11]。
2.1.1 注視點分布
根據導出的騎行者注視坐標繪制騎行者在3種光照條件下的注視點分布散點如圖1,可以發現騎行者在傍晚和夜晚的注視點分布較白天來說更為分散。

圖1 注視點分布
2.1.2 注視行為分析
根據數據繪制騎行者在3種光照條件下的注視指標如圖2,可以發現騎行者在白天時注視次數高于傍晚和晚上,在夜晚騎行者的注視時間和注視時間百分比高于傍晚,這說明受光照的影響,騎行者的單次注視時間增加。這是因為在低光照條件下,騎行者的騎行難度加大,騎行者需要集中注意觀察道路情況,因此隨著光照條件的減弱,注視次數下降而注視時間上升,夜晚的路燈照明條件較傍晚雙重光照對騎行者的影響更大。
2.2 視負荷程度分析
眼動研究中視負荷程度的表征參數主要有眨眼行為、掃視行為和瞳孔變化。眨眼行為表示騎行者的緊張程度,掃視行為表示騎行者對周圍復雜信息的獲取能力,瞳孔變化一定程度上表示騎行者的疲勞程度[11]。
2.2.1 眨眼行為分析
根據數據繪制騎行者在3種光照條件下的眨眼指標如圖3,可以看出騎行者在3種光照條件下的每秒鐘眨眼速率和眨眼時間的排序為:白天>傍晚>夜晚,平均眨眼時間排序則相反。說明受光照影響,當騎行者處于較暗照明條件時,會減少眨眼次數、增加眨眼間隔時間,騎行者更容易產生緊張感。

圖3 騎行者的眨眼指標數據對比
2.2.2 掃視行為分析
根據數據繪制騎行者在3種光照條件下的掃視指標如圖4,可以看出騎行者在3種光照條件下的掃視次數、掃視時間和掃視時間百分比數據的排序為:白天<傍晚<夜晚。掃視指標的上升說明當騎行者處于較暗照明的條件下,會進行更頻繁的掃視行為來獲取道路信息。

圖4 騎行者的掃視指標數據對比
2.2.3 瞳孔面積變化分析
騎行者在3種光照條件下的瞳孔指標如表1,可以看出騎行者在白天時瞳孔變化程度最小,夜晚的變化程度最大。說明受光照的影響,當處于較暗照明的條件下,騎行者更容易產生疲勞感。

表1 3種光照條件下騎行者瞳孔指標數據
綜合掃視、眨眼和瞳孔變化數據可以發現,騎行者在更暗程度的照明條件下,更緊張也更容易產生疲勞感。為保證自身安全,夜間騎行時騎行者應盡量選擇光照條件更充足的路段。
3 注視轉移特性分析
3.1 注視區域劃分
騎行者注視區域的劃分方法有視力角劃分、注視目標劃分和動態聚類法等。視力角劃分法較為簡單,但準確度較低。注視目標劃分法準確度較高,但對數據有一定要求。動態聚類劃分法速度較快且準確度較高,但可能不符合實際道路情況。考慮各方法優缺點,實驗采取K均值動態聚類和注視目標劃分相結合的方法對道路進行劃分,實驗場景如圖5。

圖5 實驗場景
選擇K均值聚類算法[12],使用MATLAB軟件對實驗注視點坐標進行聚類分析,當K均值為5即劃分為5個區域時聚類結果較好,輪廓值接近1且無負值,聚類結果如圖6。

圖6 注視點聚類結果及輪廓值
綜合考慮實驗場景的注視目標,將騎行者的注視區域劃分為遠處區域、前方區域、機動車區域、道路和建筑區域和行人區域,區域劃分結果如圖7。

圖7 注視區域劃分
3.2 各區域注視情況
根據注視區域劃分結果,進行數據處理,得到3種光照條件下騎行者在各區域的注視次數和注視時間指標數據如表2。由表2可知:

表2 3種光照條件下騎行者各區域注視指標數據
1)3種照明條件下,騎行者的重點關注區域都是遠處區域,注視時間占比分別為49.85%、51.26%、41.46%,關注遠處區域可以提前觀察道路情況、增加反應時間,保證自身安全。
2)隨著光照條件的減弱,騎行者對前方區域的注視占比逐漸減少,對機動車區域和行人區域的注視占比逐漸增加,對道路和建筑區域的注視占比基本相等。這是因為在較暗照明的情況下,騎行者對注視點的單次注視時間增加,需要更長的時間識別道路和交通狀況,為保證自身面對突發情況能做出及時的反應,會將更加關注視野的遠端和更加開闊的區域,對道路狀況進行全面把控。
3.3 基于馬爾可夫鏈的注視區域一步轉移概率
馬爾可夫鏈是一組具有馬爾可夫性質的離散隨機變量的集合。具體地,對概率空間內以一維可數集為指數集的隨機變量集合X={Xn:n>0},若隨機變量的取值都在可數集內:Xn=si,si∈s,且隨機變量的條件概率滿足式(1):
p(Xt+1|Xt,...,X1)=p(Xt+1|Xt)
(1)
則X被稱為馬爾可夫鏈。
由于騎行者在白天、傍晚和夜晚3種不同光照條件下的眼動特性存在差異,為進一步探究騎行者在3種實驗過程中的視覺差異性,采用馬爾可夫鏈對騎行者的注視轉移情況進行分析。在現有的實驗場景中,通過選擇實驗時間對外部的交通情況進行變量控制,盡可能保證除光照條件以外的其他因素(道路條件、交通量、騎行速度等)基本處于同一水平;在騎行過程中騎行者的注視點變化只與當前的注視點相關,并不依賴于上一個注視點,因此符合馬爾可夫鏈的定義。
使用馬爾可夫鏈分析騎行者的一步注視轉移概率,步驟如圖8。

圖8 轉移概率統計步驟
選取實驗路段騎行者的注視點位置,將注視點定位至所劃分的區域,然后統計出騎行者在白天、傍晚、夜晚3種光照條件下在各個區域的轉移概率如表3。

表3 騎行者注視一步轉移概率
由表3可知:
1)騎行者在白天、傍晚和夜晚3種光照條件下的注視轉移特性較為相似,各個區域注視轉移概率最大的是遠處區域,其次是前方區域,當注視區域內有車輛情況,騎行者的視線停留在遠處和前方區域,可以更好地收集交通信息。
2)從白天到傍晚再到夜晚,騎行者在機動車區域、道路建筑區域和行人區域的注視轉移概率逐漸增加,隨著光照條件減弱,騎行者的注視范圍逐漸變得分散,對視線范圍內的其他區域的關注度逐漸上升。
3)騎行者在機動車區域和道路建筑區域內部的注視轉移概率隨光照條件的減弱呈現上升趨勢,在行人區域內部的注視轉移概率逐漸下降。在光照條件減弱的情況下,騎行者的視線范圍會更加傾向于停留在遠方和光照強烈的區域,對行人區域的注視停留概率變低。
3.4 注視平穩概率
若馬爾可夫鏈的所有狀態都具有遍歷性,則在馬爾可夫鏈狀態空間E內,對于任一注視轉移概率pij,都存在與之對應的概率分布πj,使其乘積的總和為1,如式(2):
(2)
則稱{πj,j∈E}為馬爾可夫鏈的平穩分布[13]。
針對騎行者建立的馬爾可夫鏈存在穩態分布,騎行者的注視平穩概率如表4。
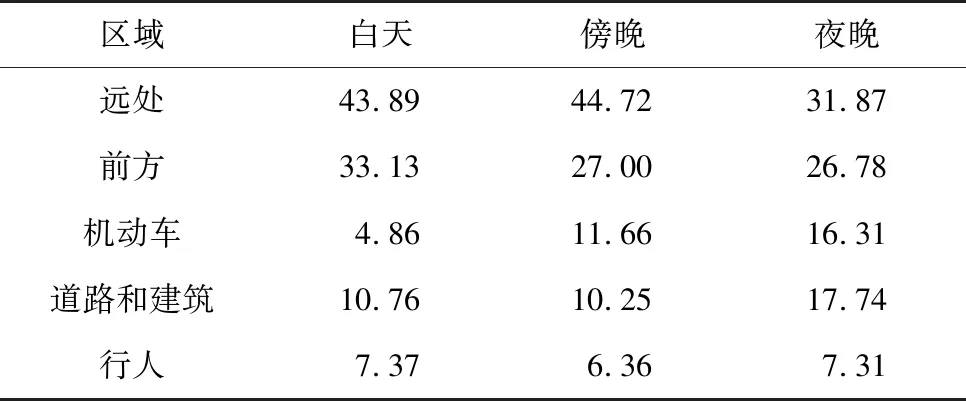
表4 騎行者注視平穩概率
可以看到,在3種光照條件下,騎行者對遠處區域的注視平穩分布概率都最高,其次是騎行者的前方區域。隨著光照程度降低,騎行者對遠處區域的注視平穩分布概率逐漸側重于機動車和道路建筑區域,這說明:
1)受兩側隔離帶的影響,騎行者對兩側的關注度較低,更關注遠處和前方區域,以便應對交通的突發情況;
2)隨著光照條件的減弱,騎行者的注意力會轉移,尤其是當夜晚僅有路燈照明時,騎行者在關注遠處區域路況時,注視概率會因為光照不足而偏向其他區域;
3)在直行道路且兩側都有隔離帶的路況下,騎行者會比較關注對自己影響更大的非機動車區域,但如果騎行者的注意力過度集中于前方和遠處區域,在無隔離帶的道路上騎行會減少自身的危險感知程度,從而增加事故的發生。
4 視覺變化率分析
綜合3種不同光照條件中騎行者的視覺特性,分析騎行者在光照條件降低時的視覺變化情況,定義騎行者在兩個變化過程中各項視覺指標的變化率Ai和Bi分別為式(3):
(3)
式中:i為視覺特性指標,i的取值范圍為1~4,分別為注視時間、掃視速度、眨眼頻率、視覺轉移;X′,Y′,Z′分別為3種光照條件下騎行者的視覺指標值;Ai和Bi分別為騎行者從白天到傍晚和從傍晚到夜晚的視覺指標的變化率,視覺指標的變化代表光照度降低時視覺的衰退情況。
光照減弱時騎行者視覺指標變化情況如表5。
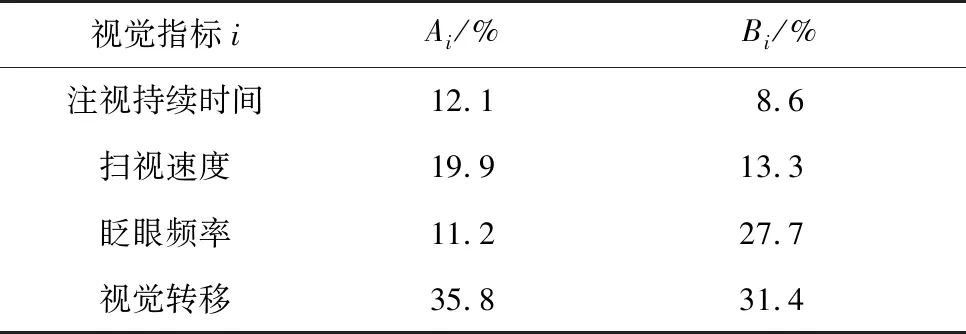
表5 光照減弱時騎行者視覺指標變化情況
根據表5可知:
1)注視持續時間增加,代表認知能力和反應能力的下降,騎行者從白天到傍晚的注視持續時間變化率高于從傍晚到晚上的注視持續時間變化率,表明騎行者從白天到傍晚的認知能力和反應能力的下降更明顯。
2)掃視速度的降低,代表在固定的時間內掃視次數減少,也說明獲取復雜信息的能力降低。騎行者從白天到傍晚的掃視速度變化率高于從傍晚到晚上的掃視速度變化率,表明騎行者從白天到傍晚獲取危險信號的能力下降更明顯。
3)眨眼頻率的增加,代表緊張程度的增加。騎行者從傍晚到晚上的眨眼頻率變化率高于從白天到傍晚的眨眼頻率變化率,表明騎行者從傍晚到晚上的緊張程度更高。
4)視覺轉移概率越大,說明對該區域的關注程度越高。騎行者從白天到傍晚的視覺轉移變化率略高于從傍晚到晚上的視覺變化率,表明騎行者從白天到傍晚對各個區域的兼顧概率略高于從傍晚到晚上。
5 結 論
為分析騎行者在城市道路不同光照條件下的眼動特性,選取3種不同的光照場景,以騎行者的眼動實驗分析其差異性和變化規律,得出結論如下:
1)由白天到傍晚再到夜晚,騎行者的視野范圍逐漸分散,注視時間和掃視時間增加,眨眼頻率減小,瞳孔直徑變化范圍變大。說明隨著光照條件的減弱,騎行者騎行難度加大,騎行者需要集中注意、更加頻繁地進行掃視行為觀察道路情況,較暗的照明條件更容易使騎行者產生緊張和疲勞感。
2)騎行者在騎行的過程中,關注的重點分別是遠處和前方區域,隨著光照條件的減弱,騎行者的注視范圍會逐漸擴散,對視線范圍內的其他區域的關注度逐漸上升。根據注視轉移概率可知,騎行者注視轉移概率最高的是騎行的遠處和前方區域,白天時遠處和前方區域的同區域注視轉移概率達到了0.604和0.476,而隨著光照條件的減弱,騎行者的視線范圍會更加傾向于停留在遠方和光照條件更好一些的區域。
3)根據光照減弱條件下騎行者視覺變化率,表明騎行者從白天到傍晚的認知能力和獲取危險能力的下降較傍晚到夜晚更明顯;騎行者從傍晚到夜晚的緊張程度變化較白天到傍晚更高;騎行者從白天到傍晚對各個區域的兼顧概率略高于傍晚到夜晚。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
載人航天(2021年5期)2021-11-20 06:04:32
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
外語學刊(2016年4期)2016-01-23 02:34:15
電測與儀表(2015年5期)2015-04-09 11:30:52