自動泊車系統行人安全的暴露度策略研究
2024-01-01 00:00:00李齊麗蘇婧馬飛龔雪顏
汽車與新動力 2024年5期
關鍵詞:風險控制
摘要:針對智能駕駛泊車系統,以行人的暴露度為研究對象,通過對相關標準和實際場景的研究,確定行人暴露度的分析依據,提出創新的設計應用策略。該策略可適應多種不同的用戶環境需求,并能在記憶泊車功能中實現自適應智能駕駛。通過對安全分析暴露度的判斷進行解析和實際案例應用,展示了該策略的有效性,如在不同巡航行駛條件下可根據行人出現情況調整泊車場景的暴露度及對應車速等。該策略可為智能駕駛提供安全方案的技術指導。
關鍵詞:智能駕駛;功能安全;風險控制;暴露度
0 前言
隨著智能駕駛技術的快速發展,對于功能安全技術的深入開發愈發重要,越來越多的專業技術人員投入這項頂層設計任務中,由此帶來的技術爭論也愈發增多。本文對行業內頗有爭議的汽車功能安全目標的應用策略進行了研究。業內普遍采用汽車安全完整性等級(ASIL)來進行功能安全目標的定義,與傳統汽車功能安全定義不同的是,智能駕駛汽車的應用場景被約束或被限制,這在場景細分上妨礙了危害分析、風險評估(HARA)分析和安全目標的設定。通常,在汽車功能安全設計中,會將一個場景切分為多個不同維度的場景,并對細分場景暴露度進行定義;當場景的維度較少時,則將各個單場景合并之后匯總的場景暴露度進行定義。為此,需要明確哪種是正確的功能安全設計,特別是對于低速運行段的自動泊車系統的開發,行人的場景暴露度是功能安全的核心參考因素。在低車速的情況下發生車與車之間的碰撞,對于車上人員的傷害較小;但一旦發生車與人的碰撞,對于無保護措施行人的傷害度則很高。本文在行業規范和國際上已公開的指導文件的基礎上,對泊車場景中的行人暴露度進行了分析和自動泊車策略的應用研究。
1 泊車行人暴露度的現狀
GB/T 34590—2022 《道路車輛 功能安全》對暴露度的取值及相應要求進行了明確定義,但未將實際應用中的每個場景與標準中的概率對應,致使針對場景的暴露度設計存在差異。參考GB/T 34590—2022的要求,共有2種評估暴露度的要求,見表1,其中暴露度等級分為 E1(非常低的概率)、E2(低概率)、E3(中概率)、E4(高概率)。

由表1可見:暴露度的標準可通過運行場景持續時間運行場景發生頻率這2種方式進行評估。原則上為了安全滿足性,在這2種方式的評估中,應選取暴露度高的進行設計定義,以保障功能安全開發。進一步將暴露度評估具體到場景時,可參考VDA 702—2015 《功能安全背景下行人暴露評估》的定義。
結合DB4403/T 360—2023 《智能網聯汽車自動泊車系統技術要求》中定義的行人場景,以及對于車輛周邊出現行人的暴露度的距離和位置要求,可知對行人暴露度的總體要求是明確的,但對于暴露度如何分類尚未進行明確定義。
通過圖1所示的11種行人位置的場景,關于如何進行ASIL評估分配,有如下方案:① 每個場景單獨分析一個ASIL評估,最終得到11個ASIL評估,然后選取ASIL評估的最高值進行自動泊車系統的開發;② 進行相同運行設計域(ODD)下的同類場景的合并,擴充暴露度的條件。在ODD范圍內不可用智能駕駛系統進行識別和區分的情況下,這些場景均是ODD內可能出現的場景,且在同一天或每次應用中均可能遇到。
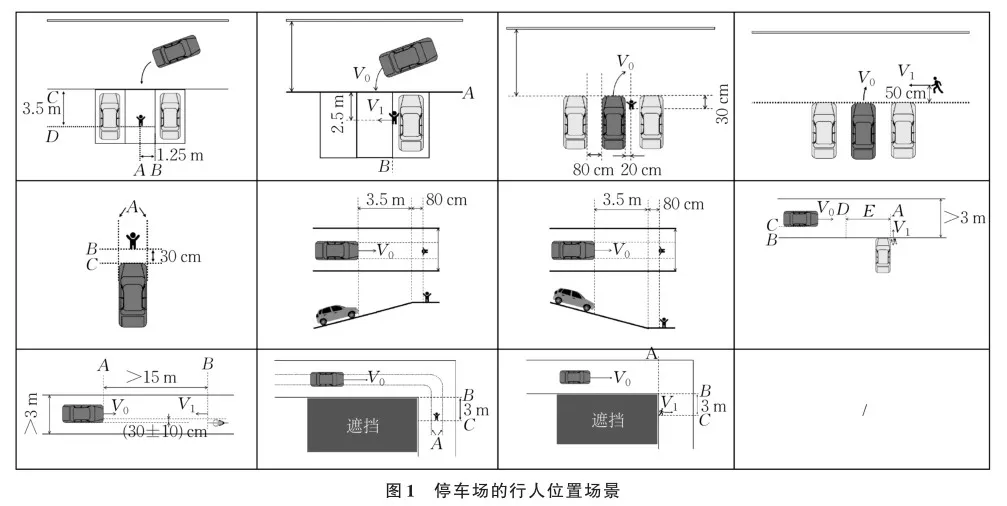
在以上2種方案中,第2種方案更為合理(除非智能駕駛系統具有ODD場景獨立判斷和識別的能力)。如果智能駕駛系統不具備ODD場景獨立判斷和識別的能力,則智能駕駛的場景分解過于細致。方案2可在嚴重度(S值)和可控性(C值)不變的情況下,降低單場景的暴露度,從而使最終所有的ASIL評估的最高值降低,以減少控制器開發的成本和ASIL要求,但總體危害并未規避。假定分析的是突然竄出行人的暴露度,細分場景又可分為從車中間出現、從車頭方向出現、從遮擋物后方出現,如果每個場景都進行獨立分析,則暴露度相同,但對于車輛和行駛情況來說,需要面對的并非獨立的一個場景,而是這些場景都可能出現,無論是哪個突然出現行人的場景,其意義和需應對的安全策略都是相同的。從暴露度的設計上來說,就是這些場景出現概率的疊加,即匯總為“突然竄出行人”[1]這一種場景。
2 泊車系統的行人暴露度分析
2. 1 記憶泊車(HPA)在尋車位過程的暴露度分析
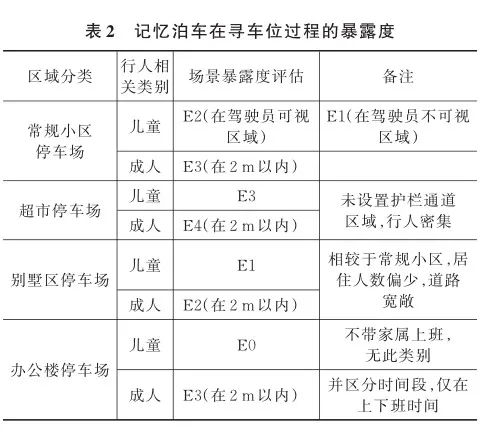
根據記憶泊車的功能安全分析,典型的風險場景 暴露度定義按不同維度進行。在車速小于10 km/h時,按經驗分析出現在風險區內的行人相關暴露度見表2。由表2可見:在不同的環境情況下,各種情況的適應性非常重要,暴露度的確定及相應措施應視環境情況而定。
2. 2 泊車系統的最高運行速度與暴露度的關系
由上述行人出現在風險區的基本評估可見,尋找車位時的運行車速與行人出現的距離同樣也會影響暴露度的變化。車速低時,風險區的距離短;車速高時,風險區的距離較長[2]。縱向距離與車速的計算示例見表3。
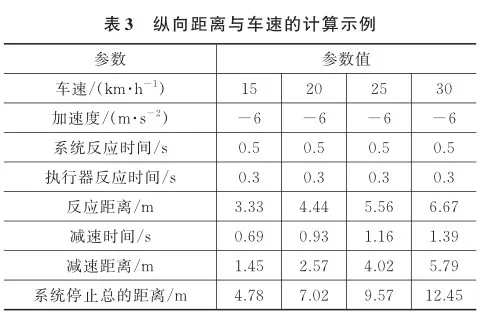
根據泊車系統中各種車輛特性和組成部件的特性,可估算出系統安全停止距離[3]與最高車速的對應關系。由表3可以看出:當車速為30 km/h時,車輛至少需要12.45 m才能剎停。對于避免碰撞行人的要求來說,行人不能出現在此距離內,否則可能會出現與車輛發生碰撞或被車輛碾壓等情況。因此,兼顧系統不同特征點的變化,將該車速直接定義與DB4403/T 360—2023的場景相同(如圖2所示),將安全策略定義為允許行人在13.2 m的間距外橫穿。

3 應用策略
3. 1 策略設計
根據記憶泊車的功能安全分析,針對遇到行人而制動失效的風險評估是關鍵需求,應通過功能安全的最高ASIL評估來進行該場景的風險應對策略設計。通過智能駕駛控制器的環境感知模塊創建“行人暴露率的環境模型”,根據“避免碰撞行人”的安全評估總目標將ASIL評估設定為B級(一般ASIL B級以上需使用冗余架構)。本策略無需應用域控制器的全套冗余安全鏈路,亦可實現對應較高車速的自適應功能安全應用設計。
首先,明確記憶泊車的位置,以確認暴露度的有效區域;其次,設置較低的車速進行默認的機器學習階段的應用,在機器學習適應的過程中達到暴露度確認的次數和時長后,對實際環境的暴露度算法進行自適應調整,通過提升車速或降低車速來保障泊車安全。在自適應記憶泊車完成車速的調整過程中,若環境發生變化并識別到新的暴露度,則再次降低車速進入適配安全控制,以此進行最高等級的泊車安全風險規避,從而將暴露度遺漏識別和功能安全故障的發生概率降低到可接受的范圍內。
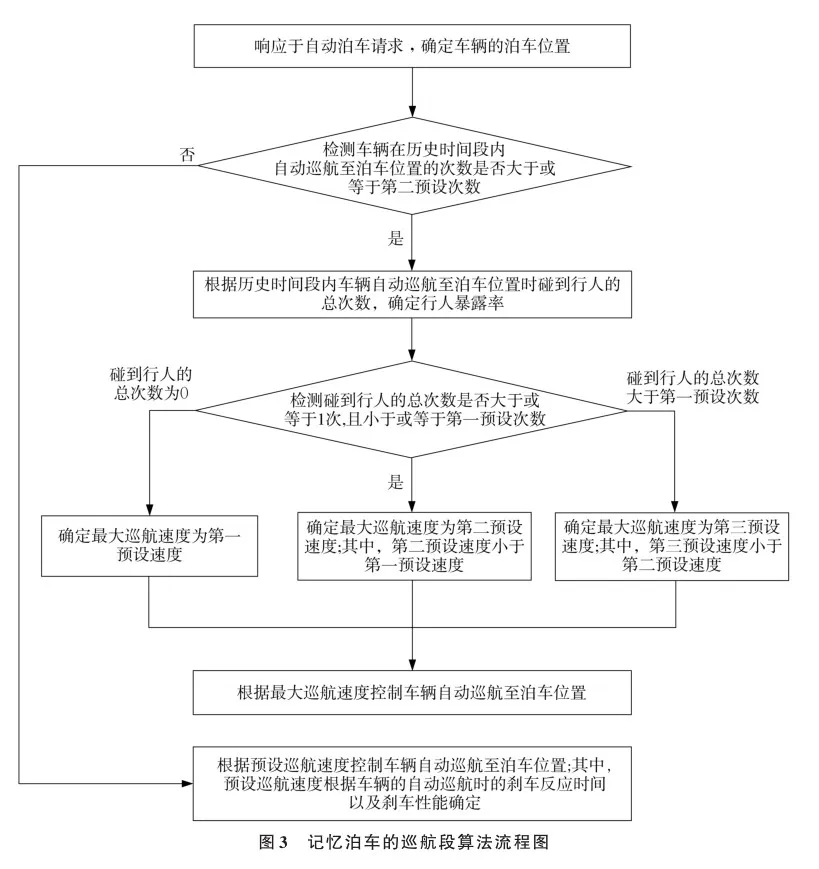
按上述策略設計的智能駕駛控制器的記憶泊車巡航段算法流程如圖3所示。
3. 2 實施效果
對所設計的泊車產品進行應用實施案例分析,其可達到的實施效果為以下3個條件所述:
(1) 在大于等于1個月的巡航行駛過程中,未出現1次1個行人在車輛泊車行駛前方13.2 m范圍內,且至少應用記憶泊車功能巡航的次數在同一個停車場不少于30次,則將本停車場的暴露度評估為E2,對應可允許最高車速為30 km/h。
(2) 在大于等于1個月的巡航行駛過程中,出現大于1次但小于10次行人在前方13.2 m(源于DB4403/T 360—2023中的場景)范圍內,且至少應用HPA功能巡航的次數在同一個停車場不少于 30次,則將本停車場的暴露度評估為E3,對應可允許最高車速為20 km/h。
(3) 在大于等于1個月的巡航行駛過程中,出現大于10次行人在前方13.2 m范圍內,且至少應用HPA功能巡航的次數在同一個停車場不少于30次,則將本停車場的暴露度評估為E4,對應可允許最高車速為15 km/h。
基于以上模型的啟用需要時間,故初始值設計定義為20 km/h。當條件3達到時,車速立即降為15 km/h,說明風險高,需要慢速行駛,防止出現有穿插行人而車輛無法及時剎停規避;當條件2達到時,下一次巡航段車速提升為20 km/h;當條件1達到時,下一次巡航段車速提升為30 km/h。
在實際項目應用中,該策略根據感知識別率和場景的變化周期對巡航車速的具體調整時間進行標定處理,建議標定變換時間為1~6個月。本策略明確定義:1個月大于10次行人在前方13.2 m范圍內的暴露度評估為E4。將暴露度明確定義,可規避算法中無法進行“多次”的模糊概念設計。
4 結語
本文通過對相關標準和實際場景進行研究,確定行人暴露度的分析依據,提出了智能駕駛泊車系統中行人暴露度的分析依據和創新設計應用策略。該策略可以適用于多種不同的用戶環境需求,并能在車輛記憶泊車中實現自適應功能,為先進的智能駕駛技術提供功能安全策略,可有效保障無保護措施行人在自動泊車過程中的安全。
參考文獻
[1] 屈瑞飛,薄濤.歐洲新車評價規程弱勢道路使用者主動安全保護的測試評價方法[J].汽車與新動力,2023,6(5):12-16.
[2] 唐陽山,夏道華.不同駕駛員反應時間對汽車防撞安全距離的影響研究[J].科學技術與工程,2016(1):250-254.
[3] 樓金彪,王觀,姜騰龍.微觀交通流模型在車輛自動駕駛仿真中的應用[J].汽車與新動力,2023, 6(1):28-33.
猜你喜歡
法制博覽(2016年11期)2016-11-14 10:57:01
時代金融(2016年23期)2016-10-31 13:15:35
經營者(2016年12期)2016-10-21 09:23:30
經營者(2016年12期)2016-10-21 09:21:36
經營者(2016年12期)2016-10-21 08:05:33
中國科技博覽(2016年18期)2016-10-19 08:02:53
中國市場(2016年35期)2016-10-19 02:01:14
商(2016年27期)2016-10-17 05:07:54
企業導報(2016年8期)2016-05-31 18:15:24
企業導報(2016年9期)2016-05-26 21:59:22
