基于DMC策略的高速鐵路受電弓系統機械振動研究
2024-01-01 00:00:00彭駿歐志新鄧春蘭
蘭州文理學院學報(自然科學版) 2024年4期
收稿日期:2023-07-20
基金項目:2022年高校學科(專業)拔尖人才學術資助項目(gxbjZD2022150);2022年安徽省高校自然科學研究重點項目(2022AH052447)
作者簡介:彭駿(1990-),男,安徽合肥人,講師,碩士,研究方向為機械設計與自動化.E-mail:821057412@qq.com.
*通信作者:歐志新(1982-),男,安徽肥東人,副教授,碩士,研究方向為智能電網技術、預測控制.E-mail:ozxin2008@126.com.
文章編號:2095-6991(2024)04-0064-06
摘要:高速鐵路受電弓系統要求電力機車在運行時保證弓網接觸的穩定和安全,特點是弓網電流傳輸平穩,參數實時監測存儲,弓網機械振動誤差小和運行曲線調節速度快.本文首先分析了高速受電弓系統運行參數的設計指標和曲線特點,提出弓網機械振動的結構;其次,分析了弓網機械振動的原理和DMC參數預測模型,建立基于開環預估控制算法流程圖.DMC作為一種類聚優化曲線的開環控制,其主要工作原理是運用受電弓系統動態的參數指標為參考輸入,以弓網機械振動在線檢測和曲線調整為主的優化策略.通過算法與系統性能之間的定量關系,在應用中對設計參數進行調試.實驗結果表明,基于DMC開環控制方法優于GPC閉環反饋控制效果,且具有最優解.
關鍵詞:受電弓系統;DMC策略;機械振動;實驗傳感電路;GPC模型
中圖分類號:TM7""" 文獻標志碼:A
Research on Mechanical Vibration ofHigh-Speed Railway Pantograph System Based on DMC Strategy
PENG Jun, OU Zhi-xin*, DENG Chun-lan
(Department of Urban Rail Transit and Information Engineering, Anhui Communications Vocational amp; Technical College, Hefei 230051, China)
Abstract:Basic characteristics of high-speed railway pantograph system, it is required to ensure the stability and safety of pantograph contact during the operation of electric locomotive, the characteristic is that the current transmission the pantograph is stable, real-time monitoring and storage of parameters, the mechanical vibration error of the pantograph is small and the operation curve adjustment is fast. Firstly, this paper analyzes the design indicators and curve characteristics of the operating parameters of the high-speed pantograph system, proposes the structural characteristics of mechanical vibration of pantograph. Secondly, this paper analyzes the principle of mechanical vibration of the pantograph, as well as the parameter prediction models of DMC, establishes a flowchart based on open-loop predictive control algorithm. DMC (Dynamic Matrix Control) is an open-loop control for clustering optimization curves. The mechanism is to use the dynamic parameters of the pantograph system as the reference input, the main optimization strategy is to detect the mechanical vibration online and adjust the curve. The quantitative relationship between algorithm and system performance guides the debugging of design parameters in application. Finally, through the field instrument detection and analysis of four groups of bow net experiments, theoretical simulation comparison, it is concluded that the DMC open-loop control method is superior to GPC (generalized predictive control) closed-loop feedback control effect has the best solution.
Key words:pantograph system; DMC strategy; mechanical vibration; experimental sensing circuit; GPC model
0" 引言
高速鐵路具有運行速度快、線路距離跨度大、受電弓系統機械波動明顯和電流傳輸間斷性誤差增大等特點.研究受電弓系統機械振動趨勢和抑制接觸的方法是保證穩定電流安全傳輸的基礎[1].通常采用受電弓系統建模取值和閉環參數修正法對超調的誤差和過大的機械振動進行抑制或在線調節,由于列車高速運行不能停車檢測或通過傳感器裝置將采樣的參數進行波動分析,因此其接觸壓力和振動頻率是主要的性能指標.
動態矩陣控制DMC(Dynamic Matrix Control,DMC)是一種未知模型預測結構的動態矩陣算法,動態運行的弓網關系模型建立過程復雜,參數多變和結構失配時更難以建立精確的模型分析其內在運行機理.劉志剛等[2]將整體弓網線路分成若干段和時間區域,通過分矩陣方式納入研究采樣的參數,如弓網振動頻率速度和電流誤差,再與下一個時間段的弓網運行采樣參數進行比較,得出優化和調節方案.這種方法不用閉環的形式在數學模型中反復在線修正和反饋結構,導致計算量大、軟件內存緩沖慢和延遲性增加,誤差得不到精確的控制,機械振動等參數的檢測和抑制效果滯后.
宋陽剛[3]提出一種在線開環檢測和調節受電弓系統機械振動的方法,能有效對系統出現的誤差和波動進行矩陣修復,既可以滿足快速運行線網的精度要求,又能夠實時對弓網機械振動加以干預和調節,保證安全的電流傳輸和弓網脫離風險.
是開環控制不需要反復在線修正,符合高速運行受電弓系統的幾何參數特點[4].矩陣的含義是尋求在一定時間段內的橫縱坐標之間的相似關聯屬性,從計算規律得出下一段線路或時間段受電弓系統運行的特征,而不需要利用儀器一直記錄和存儲弓網運行的數據.
1" 受電弓系統結構和振動機理
高速運行機車的受電弓系統滿足機械振動和電氣閃絡的技術特點,從施工技術指標到裝配參數調節驗收環節,弓網接觸壓力和電流傳輸的穩定都是重要因素,決定著弓網受流的質量.本文采用動態和隨機產生的變量檢測網系統的振動情況,并對振動產生的誤差通過軟件計算求出最優解[5].
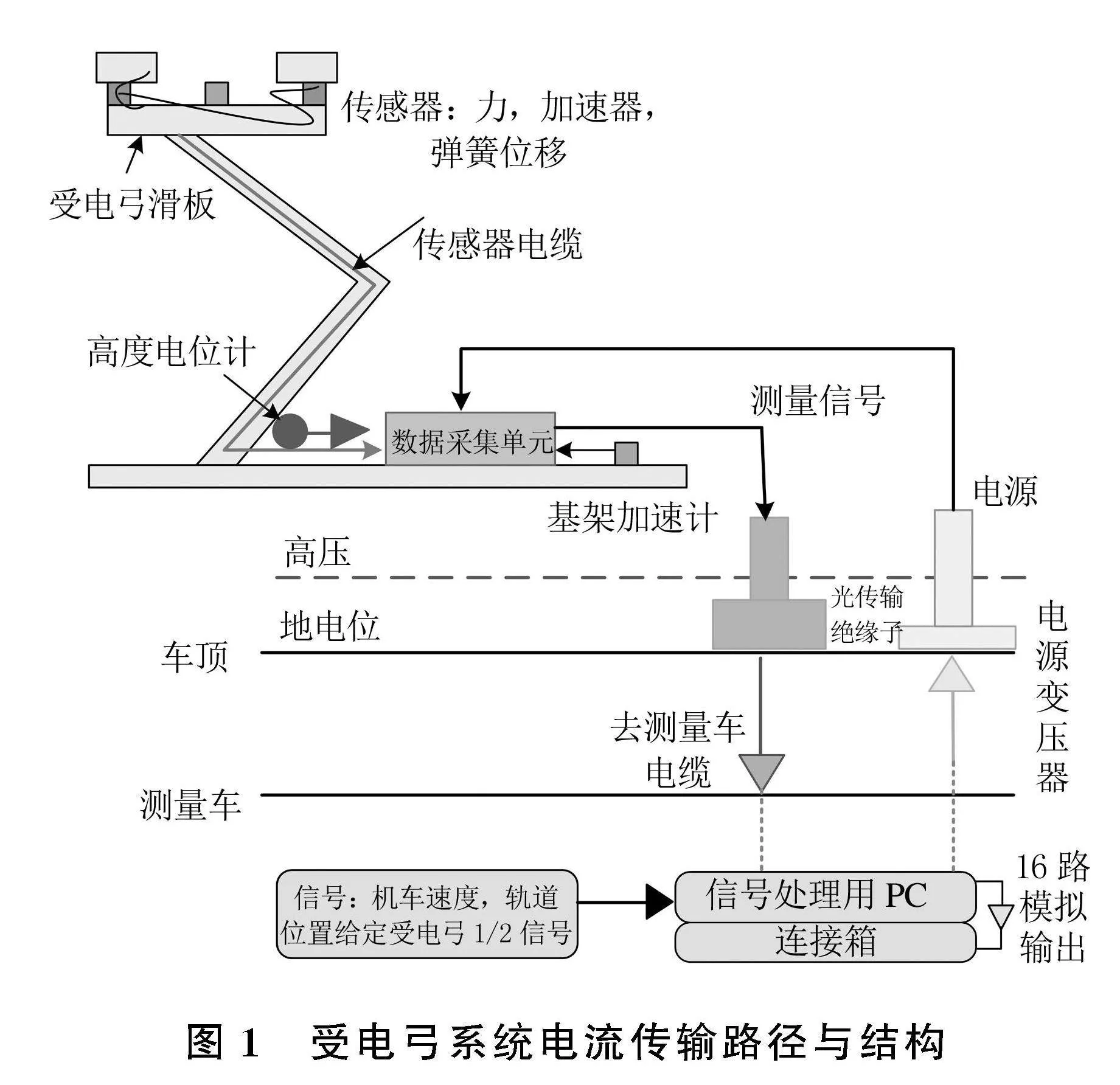
由于力、位置、速度或加速度等突然變化,引起系統的瞬態變化過程稱為振動.振動是一種過渡現象,屬于非周期運動范疇.振動過程可能是單次的、多次的或復合的,但每次持續時間比較短暫(突變).表征受電弓弓頭受到沖擊的基本物理量有速度、加速度、位移(或變形)和振動持續時間等.受電弓系統的結構和電流傳輸的路徑如圖1所示.
弓網內側通過安裝傳感器裝置實時采樣接觸壓力、加速度和水平方向的弓網偏移量.將接觸線中的電流傳輸到數據采樣單元控制器,位于高度電位計的外邊緣,主要承擔接觸線的高度穩定,防止出現弓網脫離事故.
列車運行時,弓網在硬點部位可能會出現有別于其它地方的升高或降低,弓網間的接觸壓力、振動速度、振動加速度會出現有別于其它地方的變化[6].速度越高則變化越明顯.硬點對受電弓弓頭的影響可通過弓頭的垂直加速度衡量,若出現電壓不穩定或電流信號達不到機車運行的標準數值時,則通過電源變壓器進行電流/電壓切換與適配,滿足恒定的電流大小需求.
圖1中的地電位則要求絕緣體和弓網高壓電流的大小安全系數達到設定的比例,在測量車和車頂處,安裝自動保護裝置.當受電弓的滑板接觸壓力和振動范圍超出設定的限值時,高度電位計會自動檢測并反饋至控制室,進行人工調節和干預,防止出現斷線和中斷電流供應等故障發生.
機車的運行速度和振動頻率決定受電弓系統的穩定性,如軌道側的位置信號會反饋受電弓的偏移,而自動調節和接觸線之間的偏移量,水平方向限值為受電弓活動范圍的中心區域范圍,而垂直方向則固定接觸壓力消除弓網運行的電弧和閃絡現象.
2" DMC和GPC控制模型與策略比較
DMC控制是一種在線需求模型低、計算方便和實時性好,控制效果良好的控制策略平臺.DMC控制算法是廣泛應用在預測控制算法中較為常見的具備良好平滑模型和支持向量特征的一種算法體系,具有針對延遲系統的自調節功能,當被控對象需要進行計算和輸出結果時,具有明顯的約束和反饋特征.DMC控制具有輸入函數多采樣多動態的特點,其模型建立具有擾動性和對參數選擇的依賴性,當參數失調或數學模型結構變動后,DMC控制需要根據設定的標準函數在線自適應和調節輸入-輸出之間的約束關系.在線計算和控制要求都難以達到預期目標.
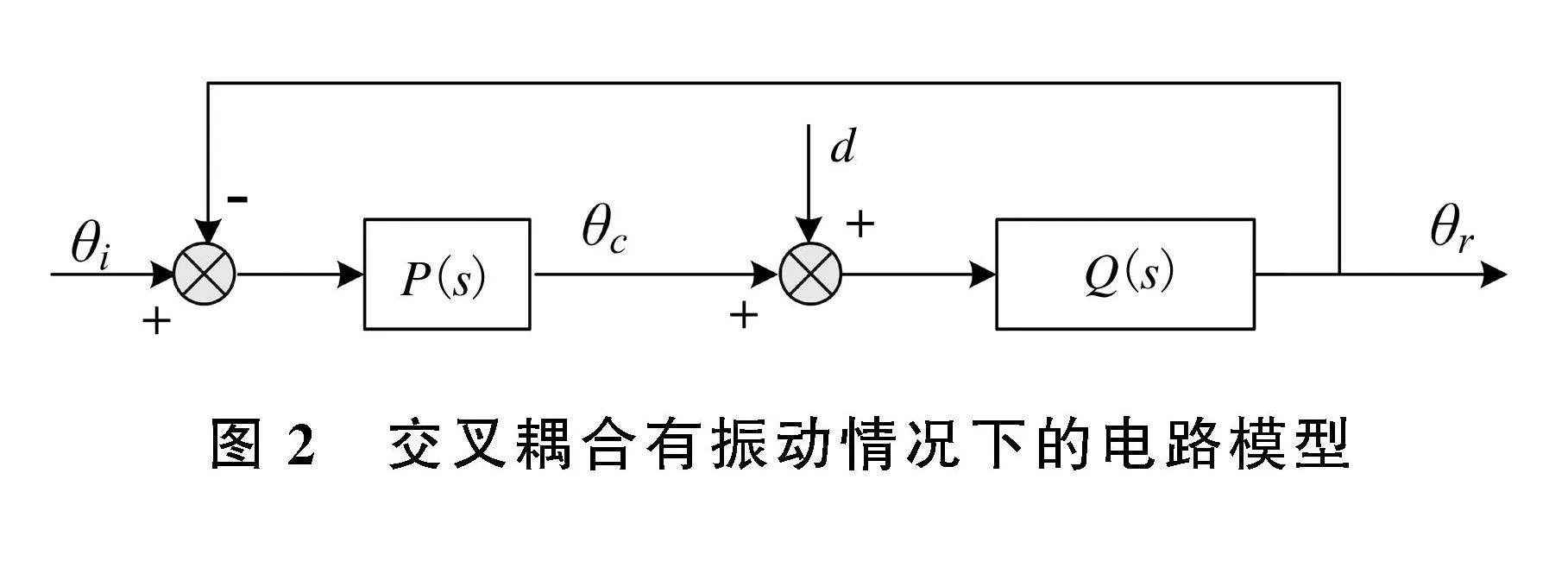
帶有振動特性的輸入/輸出補償控制算法的電路模型如圖2所示.
圖2中Q(s)表示被控量隨動系統的開環傳遞函數,P(s)表示補償控制器,其作用是使θi→θr,即被控量的跟蹤誤差趨于零[7],d為各種振動綜合,無法準確測定.則有:
θr=Q(s)(θc+d).(1)
現給定一個已知的控制參考模型Pm(s)和被控量采樣目標參數θr,為計算補償振動對輸入和電路模型的影響,先定義一個等效的振動量d∧,使電路模型可由下式代替:θr=Pm(s)(θc+d∧),可以選取:θc=θi+d∧,使θr=Pm(s)θi成立.
由于未知的振動d有較高的誤差增益或變量,Pm(s)僅是一個參考模型,因此通常應對系統進行振動補償Q(s),即:
θc=θi-Q(s)d∧.(2)
由(1)、(2)式可得:
θr={[P(s)Pm(s)]θc}/
{[1-Q(s)]Pm(s)+P(s)Q(s)}+
[P(s)[1-Q(s)]Pm(s)]d/
{[1-Q(s)]Pm(s)+P(s)Q(s)}.
所以,由θi→θr和由d→θr的閉環傳遞函數可得:
Gc(s)=Gm(s)Pm(s),
Gdc(s)=[1-Q(s)]Gm(s)Pm(s),
其中Gm(s)=
P(s)/{[1-Q(s)]Pm(s)+P(s)Q(s)}.(3)
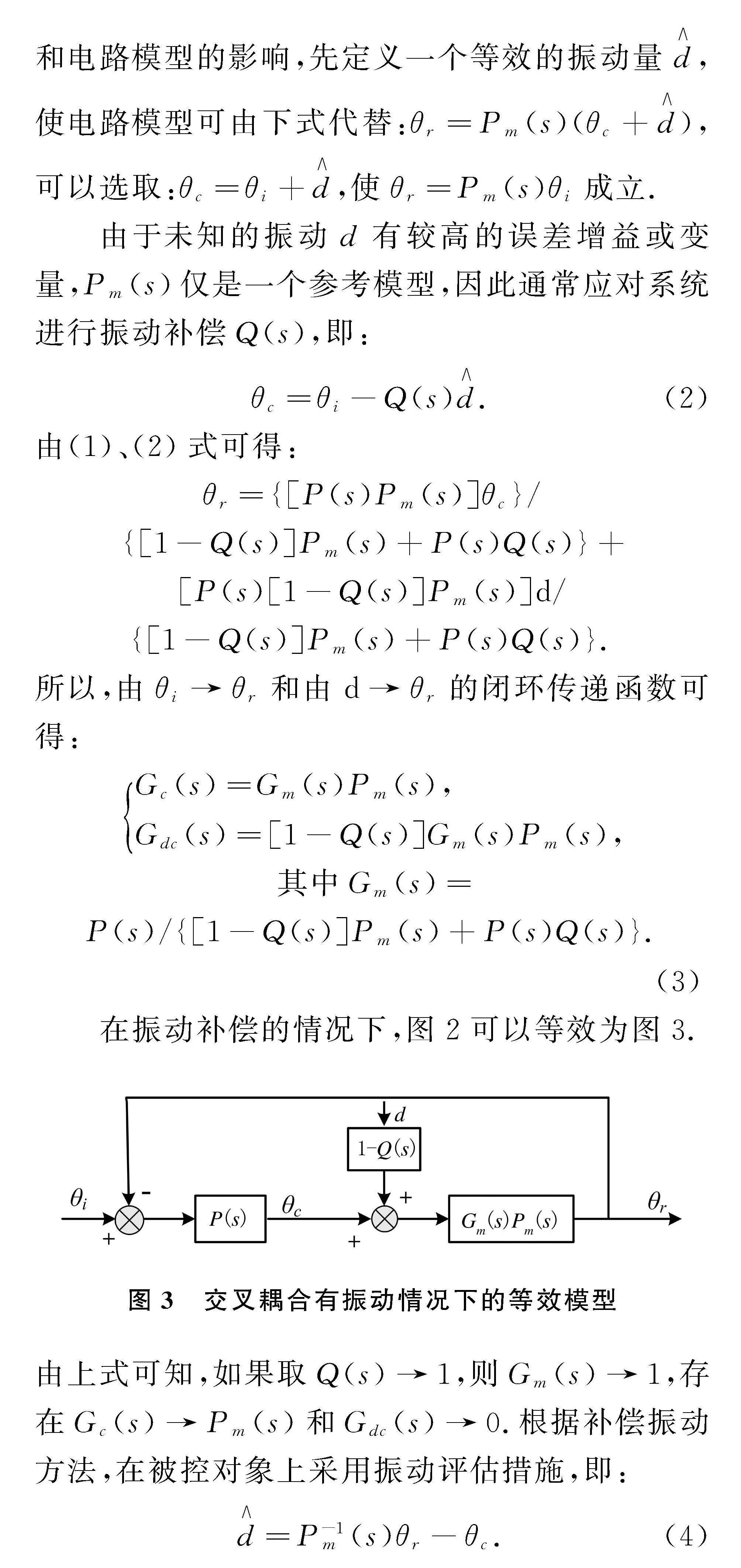
在振動補償的情況下,圖2可以等效為圖3.
由上式可知,如果取Q(s)→1,則Gm(s)→1,存在Gc(s)→Pm(s)和Gdc(s)→0.根據補償振動方法,在被控對象上采用振動評估措施,即:
d∧=P-1m(s)θr-θc.(4)
通過式(4)對信息不完整或結構多變模型的被控對象進行伺服控制和未知振動補償d∧,減小跟蹤誤差基礎實行同步預測控制.能有效平衡被控系統的誤差和振動,明顯減小各種控制模型的同步誤差,保證控制系統的精度和穩定性,提高被控對象的運行性能.
廣義預測控制GPC(Generalized Predictive Control, GPC)對工業過程有良好的適應性,GPC廣義預測控制算法的特點是系統性能之間與算法設計參數的定量匹配關系.為了更好與現場工程參數進行調試,采用基于定量分析理論進行分析,即廣義預測控制在弓網運行的每一時刻開環優化通常采用有限時域,而不是閉環控制的無限時域進行求解.
GPC預測算法主要研究對象是動態難以建立精確的數學模型,實現輸出結構對輸入參數的控制策略[8],本質上屬于傳統的預測控制范疇,為了解決算法與模型之間的匹配關系,如存在信息輸出不對稱、輸出結果失真、外部干擾/機械振動對系統結構和參數設定的影響而出現變化等情形.
3" 實驗儀器檢測與理論仿真結果比較
3.1" 弓網振動實驗參數選取檢測
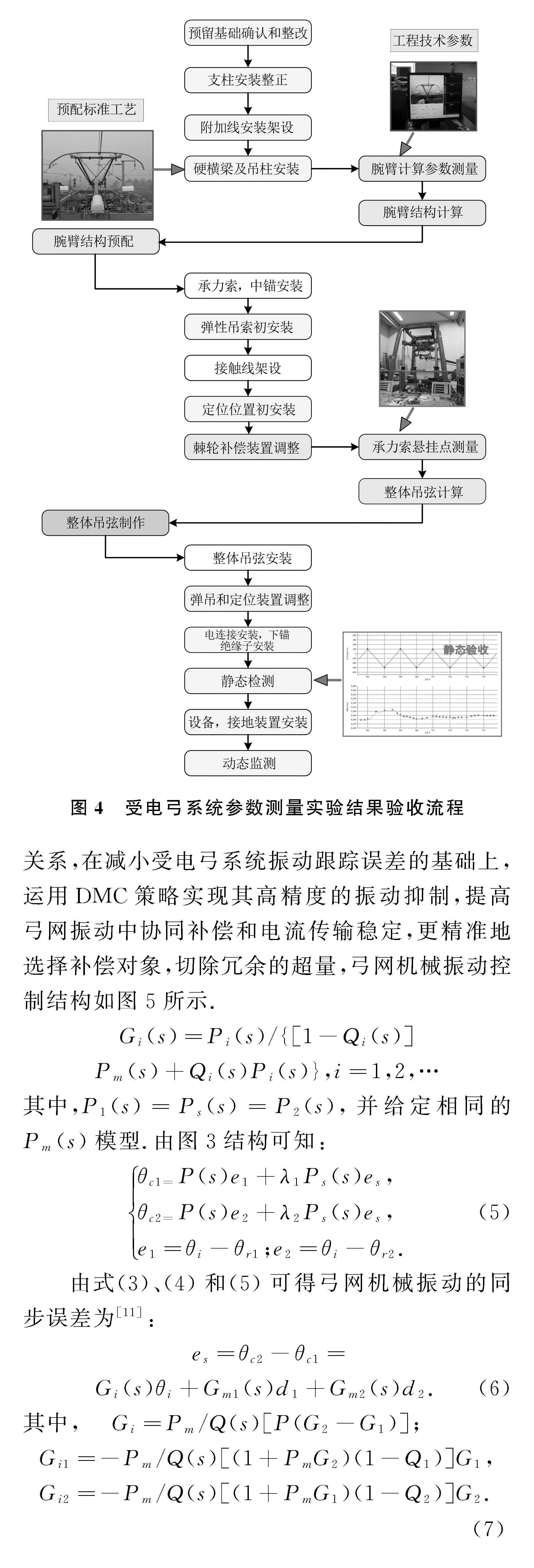
實驗儀器的檢測方法包括機械振動頻譜分析、頻率檢測參數、傳感器動態采樣與視頻曲線匹配計算,主要檢測方案是通過設計的施工驗收標準,按照裝配流程依次比較獲取的采樣參數,通過軟件平臺綜合比較,得出受電弓系統振動產生的誤差和消除波動的控制策略[9].調節比例關系的設定值,按照標準的區段和時間分割點依次對動態運行的曲線進行分布檢驗和靜態參數比較.
實驗室儀器在線測量弓網運行動態參數的流程如圖4所示.由圖4可知,后期的驗收曲線和參數設置完全按照標準設計的參考進行優化和控制調節.
GPC模型策略屬于一種主動反饋控制過程.其優點是精確度較高和抑制弓網誤差超量容易;缺點是軟件計算量偏大、數據存儲占用空間、反復離線于動態在線比較與修正、容易出現迭機、曲線或數據延遲反饋至監控屏等情形.
DMC策略屬于開環預估,不存在反復在線修正誤差或振動等,按照陣列參數的計算特點,明確結果和算法之間的定量關系,無需知道具體的數學模型和變化的結構參數,也可以根據受電弓系統動態運行的曲線特征,自主完成參數修訂和振動誤差的調節.如實驗圖5-8所示,現場四組實驗采用多傳感器和測量儀器對數據和曲線進行監控的過程,其中計算部分全部由DMC和GPC策略完成預估,出現振動峰值的曲線會自主調節至設定的范圍,保持輸出結果的穩定和系統的魯棒性.
以若干區段為研究對象,主要幾何參數包括弓網接觸壓力、偏移量、機械振動頻率和電弧閃絡等[11].彈性不均勻度與接觸線截面、接觸線抗拉應力、接觸網跨距、結構高度、弛度及有無彈性吊索有關,與接觸網的施工精度有關.接觸懸掛在硬點處的彈性出現極小值,硬點是接觸網的固有特征,也是造成弓網振動的主要原因.
3.2" 傳感器采樣DMC弓網振動模型與理論仿真
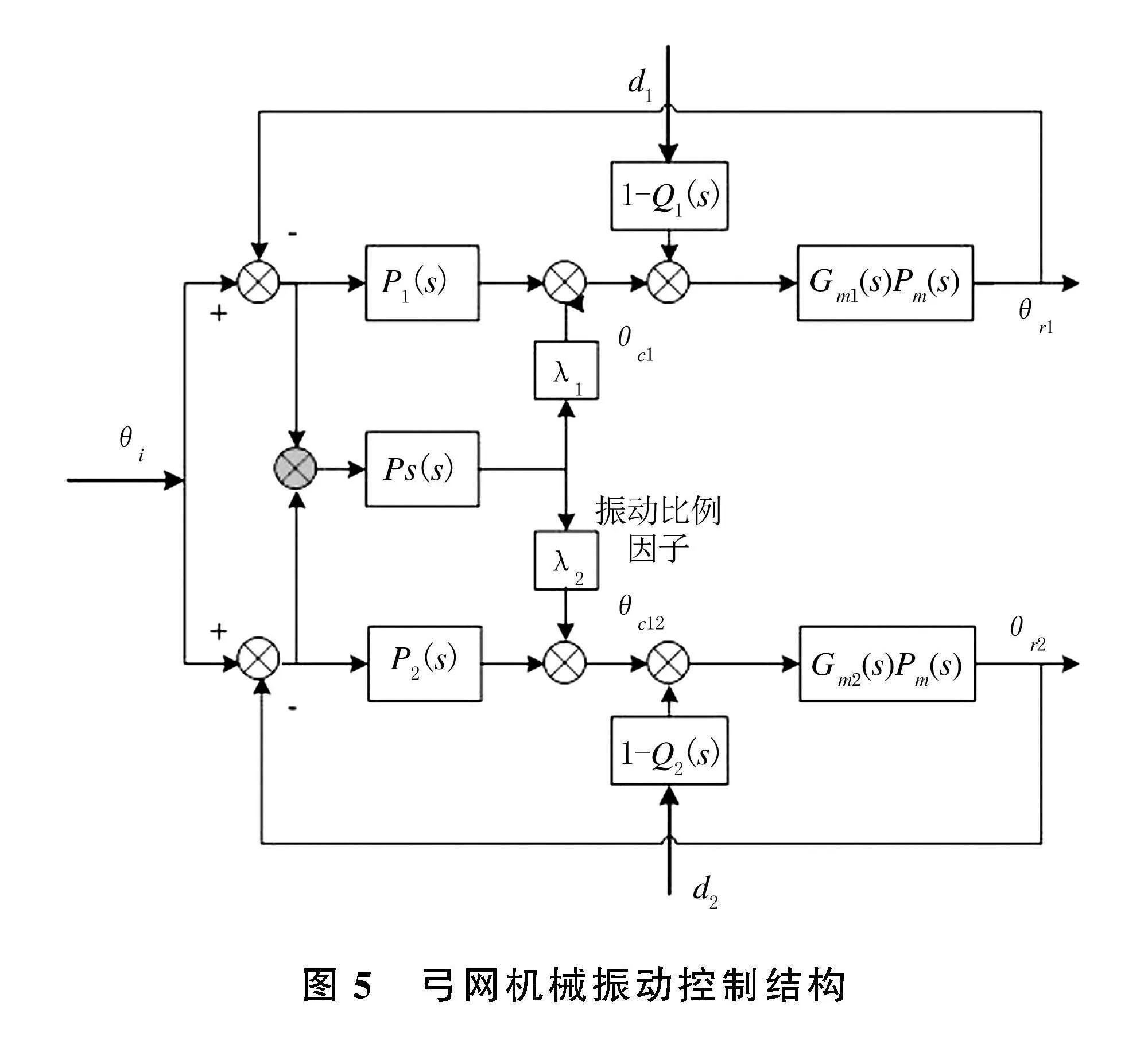
本文重點研究弓網振動電路的動態曲線參數關系,在減小受電弓系統振動跟蹤誤差的基礎上,運用DMC策略實現其高精度的振動抑制,提高弓網振動中協同補償和電流傳輸穩定,更精準地選擇補償對象,切除冗余的超量,弓網機械振動控制結構如圖5所示.
Gi(s)=Pi(s)/{[1-Qi(s)]Pm(s)+Qi(s)Pi(s)},i=1,2,…
其中,P1(s)=Ps(s)=P2(s),并給定相同的Pm(s)模型.由圖3結構可知:
θc1=P(s)e1+λ1Ps(s)es,
θc2=P(s)e2+λ2Ps(s)es,
e1=θi-θr1;e2=θi-θr2.(5)
由式(3)、(4)和(5)可得弓網機械振動的同步誤差為[11]:
es=θc2-θc1=
Gi(s)θi+Gm1(s)d1+Gm2(s)d2.(6)
其中,Gi=Pm/Q(s)[P(G2-G1)];
Gi1=-Pm/Q(s)[(1+PmG2)(1-Q1)]G1,
Gi2=-Pm/Q(s)[(1+PmG1)(1-Q2)]G2.(7)
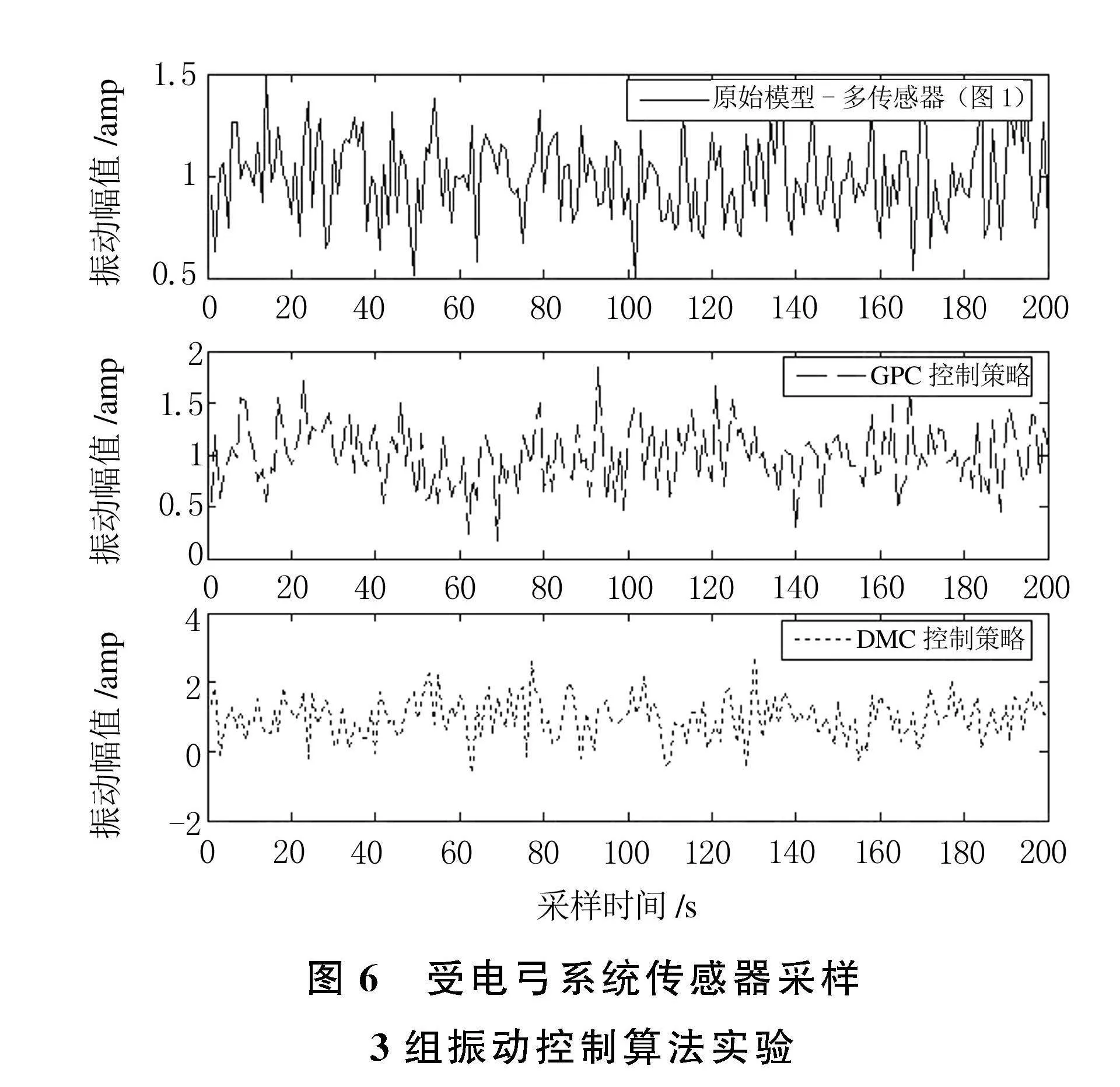
通過分析上式可知,在理想情況下,如果選取Q1(s)→1和Q2(s)→1,則可以得到:①Gi(s)=Gm1(s)=Gm2(s)→0,即在規定誤差范圍內,Q1(s)和Q2(s)都可以趨近于1,弓網振動的同步誤差將趨于零,即可實現誤差補償之間的同步;②當Q1(s)和Q2(s)不是單位傳遞函數時,Gi(s)不為零,這種情況下可以通過選擇適當的開環控制Ps(s)、λ1和λ2來滿足Q(s)的誤差特性,進而提高抑制振動的功能.對3組振動控制算法進行實驗,結果如圖6所示.
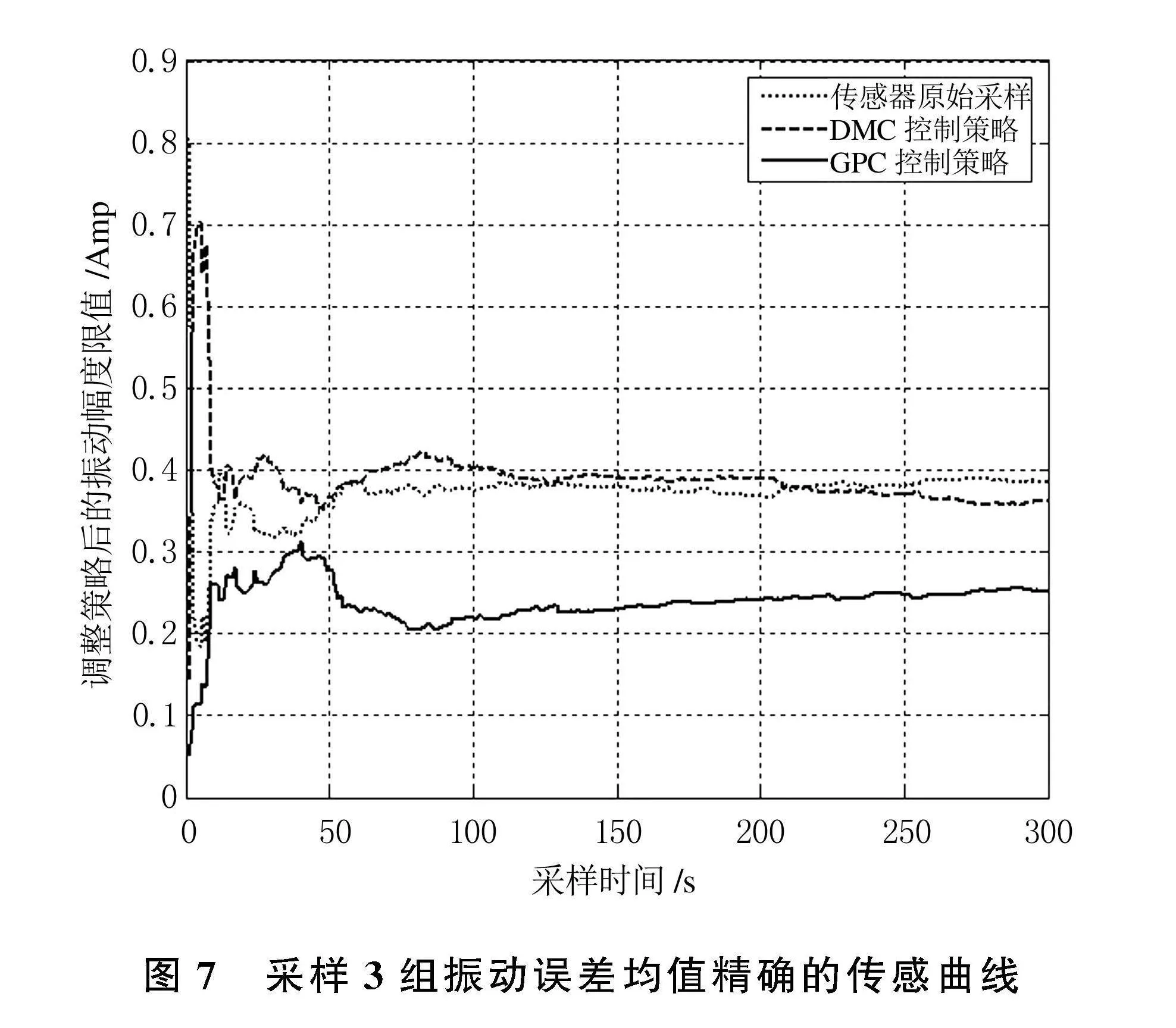
從圖6可以看出,誤差均值越大的傳感器采樣數據,對應的算法越精確,權值選擇越小越好.受電弓系統接觸力和機械振動等參數的采樣和檢測,需要通過多傳感器實時儲存和處理,信息容量和處理速度等能力決定控制策略的精確度和信息決策與調度.隨著受電弓系統每個檢測區段次數增大,最后接近真值,即誤差均值越小越精確.采樣3組振動誤差均值傳感曲線如圖7所示.
圖7" 采樣3組振動誤差均值精確的傳感曲線
從圖7可以看出,在動態傳感器測量數據的過程中,受電弓系統的參數采樣過程充滿隨機性,如果建立正確的數學模型,必須固定一定的結構和區間參數范圍,根據先驗知識觀測弓網運行的機械特征和波動,預估計算出最小弓網接觸均方誤差的最小量,該方法是基于開環式的控制策略,不需要反復在線修正和計算,就可以增大系統的延遲滯后和運行精度.
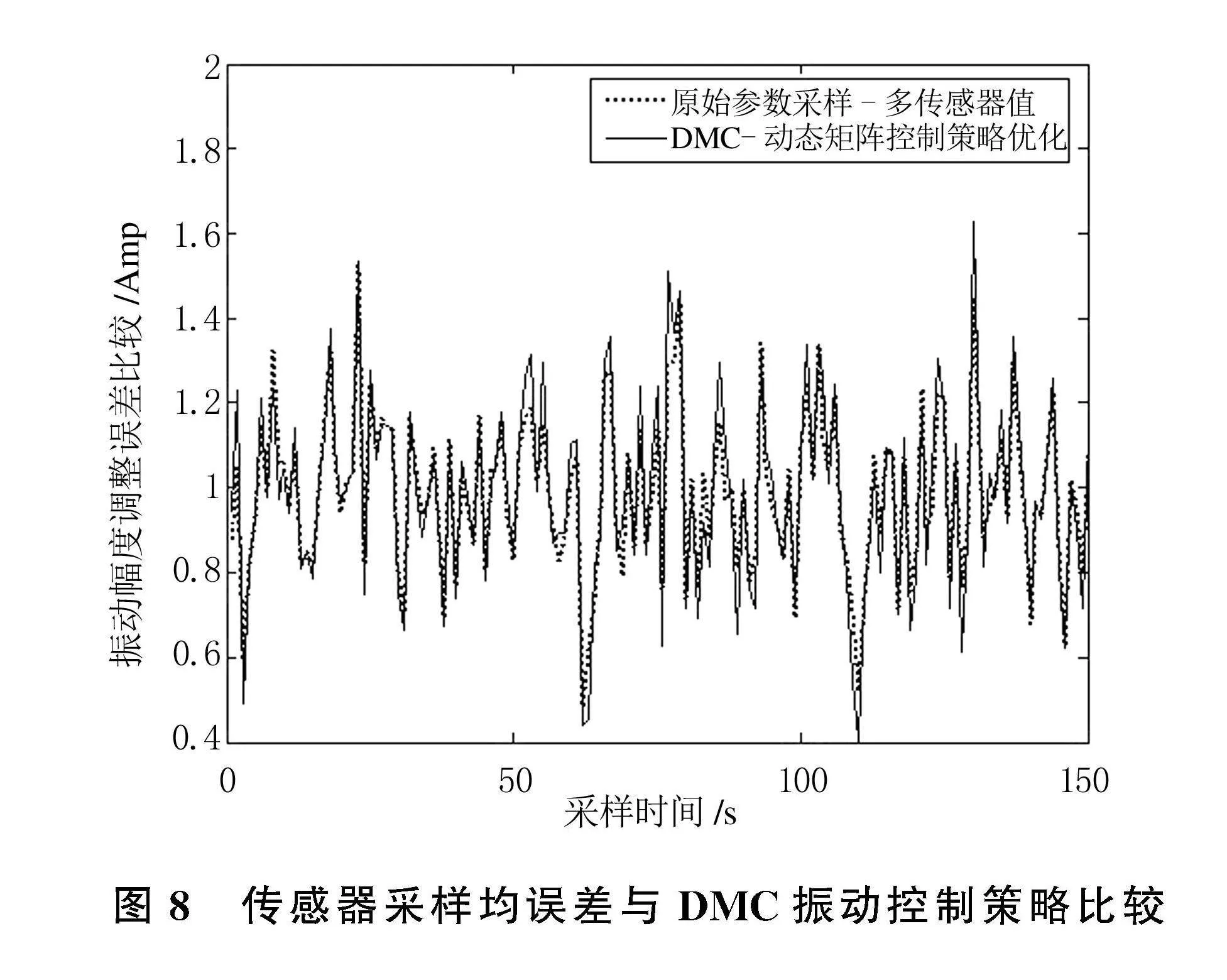
通過文中DMC模型算法對3組傳感器檢測參數做預估計算,得到融合后的曲線,并與直接對3個傳感器平均值曲線進行比較,結果如圖8所示,得到3組算法分布曲線.
從圖8可以看出,DMC和GPC廣義預測算法均能對機械振動頻率和波動范圍有效控制,并一直保持良好的動態運行權值范圍.且DMC振動頻率和幅度偏小,控制效果良好.
4" 結語
本文研究了高速運行的受電弓系統機械振動特性,了解動態幾何參數對弓網安全和穩定性的影響,并通過實驗完成弓網機械振動測試,從圖中獲取傳感器采樣參數的特性,分析受電弓系統的結構與電流傳輸原理,具有開環控制和自主修正參數誤差的功能.提出的DMC基于動態矩陣的模型控制策略,只需要知道受電弓系統運行的功能為研究對象,以單位區間為參考模型,不需要反饋進行在線修正和計算獲取的參數,減小了計算量和數據存儲,在高速運行的受電弓系統中具有低延遲、誤差調節時間響應快、機械振動頻率調節快和傳感融合參數精度高等優點,特別是在被控對象因結構變化難以建立有效的檢測等場景.
參考文獻:
[1] 吳積欽.受電弓與接觸網系統[M].成都:西南交通大學出版社,2018.
[2] 劉志剛,郝峰杰,陳杰,等.城軌牽引供電系統車-地配合參數優化方法[J].北京交通大學學報,2019,43(1):79-87.
[3] 宋陽陽.城軌交通直流牽引供電系統仿真建模及仿真平臺開發[D].北京:北京交通大學,2022.
[4] 王文華,譚小龍,萬偉,等.智能電網技術在電力調度自動化中的運用[J].自動化應用,2023,64(8):67-69.
[5] 邊書劍.電氣化鐵路接觸網運行中典型故障研究[D].南昌:華東交通大學,2020.
[6] 關金發,吳積欽,李嵐.弓網動態仿真技術的現狀及展望[J].鐵道學報,2015,37(10):35-41.
[7] 陳樂瑞,潘秋萍,孔金生.基于改進 ERSS 的電氣化接觸網斷線故障定位研究[J].電氣技術,2016(9):55-58.
[8] 王圣昆,劉明光,韓婉嬌,等.基于形態學-小波的接觸網斷線故障檢測研究[J].鐵道科學與工程學報,2018,15(7):1848-1855.
[9] 張學武.高鐵接觸網吊弦故障檢測方法[J].工程數學學報,2021,38(4):483-489.
[10] 關金發,吳積欽.受電弓與接觸網動態仿真模型建立及其確認[J].鐵道科學與工程學報,2017,14(11):2444-2451.
[11] 章來勝.高速鐵路接觸網分布式故障診斷技術研究[J].鐵道機車車輛,2020,40(5):73-77,83.
[責任編輯:李" 嵐]
