一種面向?qū)ο蠓椒ǖ闹悄懿擅迿C(jī)控制研究
2024-01-09 09:46:48丁玉濤
農(nóng)機(jī)化研究 2024年4期
關(guān)鍵詞:作業(yè)
丁玉濤
(河南職業(yè)技術(shù)學(xué)院,鄭州 450046)
0 引言
采棉機(jī)是一種大型棉花收獲機(jī)械,能夠有效提升采棉過程的自動(dòng)化水平。作業(yè)過程中,受棉花生長(zhǎng)狀態(tài)限制,采棉機(jī)經(jīng)常出現(xiàn)采收效果不理想的現(xiàn)象,如果能夠根據(jù)棉花生長(zhǎng)狀態(tài)進(jìn)行采摘作業(yè)速度的實(shí)時(shí)調(diào)整,則對(duì)提高采棉機(jī)工作效率和安全性具有重要意義[1-2]。
棉田環(huán)境復(fù)雜,采摘過程存在較多的非線性和時(shí)變性因素,為了保證采摘作業(yè)效率和采摘過程安全性,需要根據(jù)采摘對(duì)象實(shí)時(shí)調(diào)整控制參數(shù),適應(yīng)環(huán)境中的不確定因素[3]。為此,基于面向?qū)ο蠹夹g(shù),以FPGA硬件為基礎(chǔ)平臺(tái),設(shè)計(jì)一種模糊PID控制器進(jìn)行采棉機(jī)作業(yè)速度實(shí)時(shí)控制,并對(duì)采棉機(jī)作業(yè)速度進(jìn)行優(yōu)化,旨在為采棉機(jī)的高效安全作業(yè)奠定基礎(chǔ)。
1 采棉機(jī)作業(yè)速度控制調(diào)節(jié)原理
圖1所示為采棉機(jī)作業(yè)速度控制原理圖。工作時(shí),輸棉管路上的近紅外流量傳感器對(duì)管路中的棉花流量數(shù)據(jù)進(jìn)行采集,根據(jù)流量與質(zhì)量參數(shù)模型獲取采摘過程中棉花實(shí)時(shí)產(chǎn)量;當(dāng)遇到棉花堵塞輸棉管路狀態(tài)時(shí),基于模糊控制器輸出控制電流,經(jīng)伺服放大器進(jìn)行功率放大,驅(qū)動(dòng)執(zhí)行機(jī)構(gòu)狀態(tài)變化,從而改變液壓泵流量,實(shí)現(xiàn)作業(yè)速度的自動(dòng)調(diào)節(jié)[4]。

圖1 采棉機(jī)作業(yè)速度控制原理圖Fig.1 Schematic diagram of operation speed control of cotton picker
采棉機(jī)工作過程中,假設(shè)管路中的平均棉花流量為Mr,管路中的允許最大棉花流量為Mmax,傳感器電流梯度為Δi,采棉作業(yè)行進(jìn)過程中當(dāng)前速度對(duì)應(yīng)的伺服驅(qū)動(dòng)電流為Ir,下一時(shí)刻伺服驅(qū)動(dòng)電流為Inext,伺服驅(qū)動(dòng)允許最大電流為Imax,則可得出采棉過程中輸棉管路負(fù)荷梯度為
采棉過程中輸棉管路堵塞邊界條件為
|Inext|≤Imax
其中,k1、k2、k3以及k4均為正數(shù),且滿足k1≥k2≥k3。
2 采棉機(jī)作業(yè)速度控制器設(shè)計(jì)
采棉機(jī)工作過程,由于棉花的生長(zhǎng)狀態(tài)和采摘過程中環(huán)境因素影響,作業(yè)速度控制過程存在較大的波動(dòng)[5-6]。因此,通過對(duì)采棉機(jī)作業(yè)速度調(diào)節(jié)原理進(jìn)行分析,保證采棉機(jī)能夠在不同的環(huán)境采摘作業(yè)過程中進(jìn)行自適應(yīng)調(diào)整。
采棉機(jī)作業(yè)過程中,行駛速度控制器結(jié)構(gòu)原理如圖2所示。其中,控制器對(duì)采棉機(jī)伺服驅(qū)動(dòng)器、伺服閥、變量泵以及行走機(jī)構(gòu)進(jìn)行控制,保證采棉作業(yè)過程中輸棉管路不發(fā)生堵塞。棉花流量傳感器對(duì)輸棉管路內(nèi)的棉花流量數(shù)據(jù)進(jìn)行實(shí)時(shí)采集,并轉(zhuǎn)化為棉花實(shí)時(shí)產(chǎn)量,經(jīng)過輸棉管路堵塞邊界條件進(jìn)行轉(zhuǎn)化,從而得出最佳的行走驅(qū)動(dòng)控制電流,作為控制器的輸入信號(hào)[7-8]。
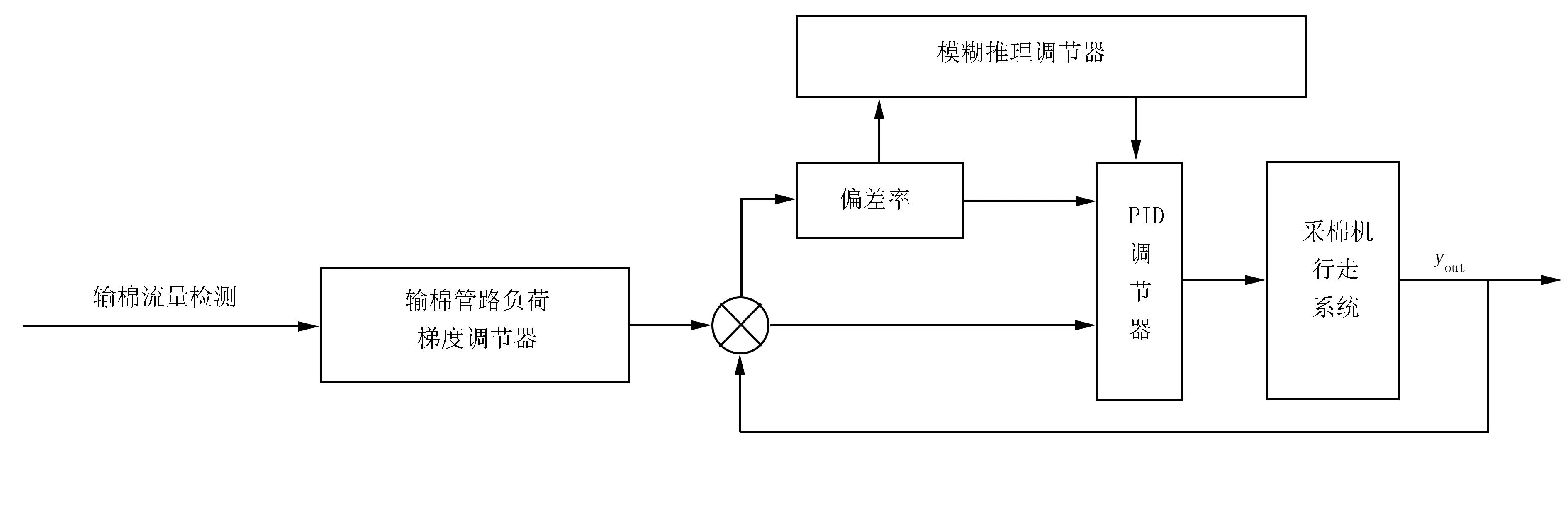
圖2 采棉機(jī)行駛速度控制器結(jié)構(gòu)原理Fig.2 Structural principle of traveling speed controller of cotton picker

將采棉機(jī)輸棉管路中棉花流量在堵塞條件模型中進(jìn)行轉(zhuǎn)化,獲取最優(yōu)化行駛速度驅(qū)動(dòng)電流,作為控制器的輸入?yún)?shù)設(shè)定值,霍爾傳感器采集到的行進(jìn)速度傳感電流與設(shè)定驅(qū)動(dòng)電流之間的偏差值和偏差變化率為控制器PID模塊輸入變量,控制器輸出語言變量設(shè)定為Kp、Ki、Kd。因此,可以得出控制參數(shù)自整定公式為
其中,kp0、ki0、kd0為控制器初始設(shè)計(jì)值;Δkp(k)、Δki(k)、Δkd(k)為控制器輸出值。
采棉機(jī)行駛速度控制器對(duì)控制參數(shù)進(jìn)行修正,確保被控制對(duì)象的過程穩(wěn)定性[13]。當(dāng)采棉機(jī)啟動(dòng)時(shí),設(shè)定采棉初始作業(yè)速度,利用流量傳感器對(duì)輸棉管路中的流量進(jìn)行檢測(cè),轉(zhuǎn)化為棉花產(chǎn)量。同時(shí),結(jié)合堵塞邊界條件模型轉(zhuǎn)化最優(yōu)行駛速度驅(qū)動(dòng)電流,經(jīng)控制器進(jìn)行分析調(diào)節(jié),生成采棉機(jī)作業(yè)行駛速度最優(yōu)化驅(qū)動(dòng)電流[14]。圖3為采棉機(jī)行駛速度控制算法流程圖。

圖3 采棉機(jī)行駛速度控制算法流程圖Fig.3 Flow chart of traveling speed control algorithm of cotton picker
3 控制系統(tǒng)仿真試驗(yàn)
為驗(yàn)證采棉機(jī)行駛速度控制器設(shè)計(jì)合理性,在Simulink仿真環(huán)境中設(shè)計(jì)仿真模型,對(duì)控制系統(tǒng)進(jìn)行模糊仿真。采棉機(jī)行駛速度面向?qū)ο髠鬏斂刂颇P涂杀硎緸?/p>
當(dāng)霍爾傳感器對(duì)采棉機(jī)行駛速度的采樣周期為1ms時(shí),仿真輸出信號(hào)幅值設(shè)定為1,由此得出控制器輸出響應(yīng)方波信號(hào)和誤差信號(hào)曲線如圖4所示,控制器輸出響應(yīng)誤差信號(hào)曲線如圖5所示。
由仿真結(jié)果曲線可以看出:采棉機(jī)作業(yè)行駛速度能夠進(jìn)行自適應(yīng)調(diào)整,控制區(qū)輸出超調(diào)量較小,同時(shí)能夠在較短的時(shí)間內(nèi)進(jìn)行速度調(diào)節(jié),具有良好的動(dòng)態(tài)響應(yīng)特性,控制系統(tǒng)運(yùn)行特性穩(wěn)定;控制器能夠面向?qū)ο筮M(jìn)行參數(shù)自適應(yīng)調(diào)整,適合用于復(fù)雜環(huán)境中采棉機(jī)作業(yè)行駛速度控制和調(diào)節(jié)。

圖4 控制器輸出響應(yīng)方波信號(hào)曲線Fig.4 Controller output response square wave signal

圖5 控制器輸出響應(yīng)誤差信號(hào)曲線Fig.5 Controller output response error signal curve
4 田間試驗(yàn)結(jié)果分析
為了驗(yàn)證采棉機(jī)控制系統(tǒng)的運(yùn)行可靠性,選擇1000m2棉田進(jìn)行試驗(yàn),分別在不同作業(yè)行進(jìn)速度下進(jìn)行棉花采摘,并記錄統(tǒng)計(jì)數(shù)據(jù)。輸棉流量與行走時(shí)間關(guān)系曲線如圖6所示,采棉機(jī)輸棉管道內(nèi)流量與行進(jìn)速度關(guān)系曲線如圖7所示。
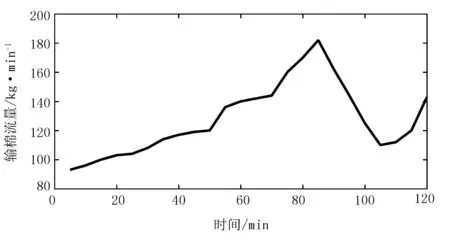
圖6 輸棉流量與行走時(shí)間關(guān)系曲線Fig.6 Relationship curve between cotton conveying flow and walking time
由圖6可以看出:采棉機(jī)的初始行駛速度為5.6km/h,在前5min的輸棉流量約為93kg/min,負(fù)荷堵塞條件最佳流量為100kg/min,此時(shí)可適當(dāng)提高采棉機(jī)行進(jìn)速度;當(dāng)采棉機(jī)行進(jìn)速度提升到5.6km/h時(shí),理想流量為120kg/min,此時(shí)實(shí)際輸棉管道流量為120kg/min,采棉機(jī)可保持當(dāng)前行進(jìn)速度。

圖7 輸棉流量與采棉機(jī)行進(jìn)速度關(guān)系曲線Fig.7 Relationship curve between cotton conveying flow and traveling speed of cotton picker
5 結(jié)論
對(duì)面向采棉機(jī)作業(yè)過程輸棉管路堵塞情況進(jìn)行采棉行進(jìn)速度控制,能夠有效提高采棉機(jī)的作業(yè)適應(yīng)性,同時(shí)減少采棉機(jī)作業(yè)過程中輸棉管路堵塞現(xiàn)象的發(fā)生,對(duì)采棉機(jī)的智能化控制系統(tǒng)提升和改進(jìn)具有重要意義。
猜你喜歡
小主人報(bào)(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級(jí)適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
