基于北斗系統的地表與地下一體式沉降監測新方法*
2024-01-18 05:45:22韓文斌于永堂鄭建國歐陽山
災害學 2024年1期
韓文斌,于永堂,孫 茉,鄭建國,歐陽山
(1. 中國電建集團西北勘測設計研究院有限公司,陜西 西安 710065;2. 中聯西北工程設計研究院有限公司,陜西 西安 710077;3. 西安建筑科技大學交叉創新學院,陜西 西安 710055;4. 機械工業勘察設計研究院有限公司,陜西 西安 710021)
我國是地質災害較嚴重的國家,具有種類多、分布廣、頻率高、危害重等特點,每年都因此遭受巨大的經濟損失,其中由于地下固體或流體開采引起的地面沉降災害較為頻發[1-2]。當前對地質體的沉降監測大多重視地表沉降監測而忽視地下沉降監測,實際上在一些場地,地下深層沉降往往率先發生,而后才反映在地表沉降。因此僅通過地表沉降監測難以及時發現安全隱患,若要全面反映地質體的變形與穩定狀態,應同時建立包括地表、地下一體式監測網絡,實現從定性分析區域沉降特征到定量分析土層變形特征的轉變[3-5]。
目前,地表沉降監測方法主要有幾何水準測量法、全站儀法、合成孔徑雷達干涉(InSAR)測量法、靜力水準測量法、衛星定位測量法等[6-9]。上述方法中,幾何水準測量法、全站儀法觀測不連續、人工臨時施測、受天氣影響大,難以及時分析沉降演化趨勢和發現地質災害隱患。InSAR測量法可觀測大面積地表變形數據,在掌握區域性場地的變形特征方面具有優勢[10],但數據處理復雜、且受地形和大氣影響大,無法快速反應地面沉降變形情況。靜力水準系統(Hydrostatic leveling system,HLS)具有觀測精度高、自動化性能好和實時測量功能強等特點[11],已廣泛應用于大型水利樞紐、高層建筑和高速軌道等工程,但測量時需要保證位于基準點處的儲液罐不發生沉降或其發生沉降后可準確測量,這樣才能保證測量結果的準確性。HLS在大范圍滑坡體、大規模地下采空區和大面積沉陷區等應用時,常會面臨無穩定基準點或基準點發生沉降后未能及時發現,以及監測點測量值不準確等問題,該方法以往只用于測量地表沉降,無法實現對不良地質體的深層沉降監測。全球導航衛星系統(Global Navigation Satellite System,GNSS)可滿足大規模、區域性、危險地段的沉降監測需求,具有定位快、全天候、自動化、連續性、測站間無須通視,適合大區域布測等優點[12]。現有的全球導航衛星系統中,北斗導航衛星系統(BeiDou Navigation Satellite System,簡稱BDS)是我國自主研發、獨立運行的全球衛星導航系統,國家正向各行業推廣和應用[13]。利用BDS系統進行變形監測時,需要運用合理的數據組合策略、誤差改正模型、周跳探測與修復方法、參數估計方法和模糊度固定策略等數據處理方法來實現高精度定位[14],實現事后處理靜態測量毫米級精度,實時動態差分厘米級精度,廣域雙頻接收機分米級精度,當采用特殊的觀測措施、精密星歷、適當的數據處理模型和軟件降噪后,精度可以達到毫米級甚至亞毫米級[15]。目前BDS定位測量設備成本仍偏高,在監測密度較高時,總體造價較高,限制了其規模化推廣應用。因此,需要探索將BDS定位測量設備與其他傳感器組合、同其他觀測手段結合,降低監測成本,以實現更好的應用效果。分層沉降標法是通過在監測區域內鉆探不同深度的鉆孔,在孔內放入底端帶沉降板的測桿,測桿保持垂直,外部加護管保護,逐段逐節引出地面并回填鉆孔與護管之間的空隙,然后采用水準儀觀測不同深度沉降標的測桿高程變化。該方法的優點是與監測地層的結合性好,沉降傳遞直接可靠,但存在觀測工作量大,觀測時效性差、觀測頻次低等不足[16]。
本文利用BDS長距離、全天候、高精度定位,HLS高精度、高頻率監測,以及分層沉降標與被測地層結合性好、可靠性高的特點,將BDS、HLS、分層沉降標相結合,取長補短、優勢互補,研發了地表與地下一體式沉降監測新方法,并通過性能測試、誤差分析,對該方法的測量效果進行了檢驗。為北斗系統在變形監測中的應用提供了一條新思路。
1 測量原理
本文介紹的基于北斗系統的地表與地下一體式沉降監測新方法的基本原理如圖1所示。在地質構造穩固,地勢較高,無物體遮擋、無強電場和微波電磁干擾的區域設置北斗基準點,在監測區域設置工作基點與監測點;工作基點處的北斗衛星接收機與靜力水準儀安裝至同一工作基點樁上,利用北斗衛星接收機觀測工作基點處靜力水準儀(相當于原靜力水準系統的基準站)的絕對沉降;監測點處的靜力水準儀與地面標或分層沉降標同軸連接,測桿將深層沉降引至地面由靜力水準儀觀測;北斗系統與靜力水準系統同步采集數據,數據經時間同步后得到工作基點的絕對沉降量,然后再由式(1)、式(2)計算各監測點的絕對沉降,最終實現對地面標及分層沉降標所監測地層的絕對沉降監測。
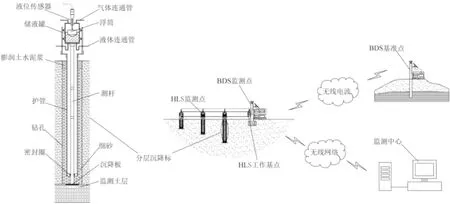
圖1 基于北斗系統的地表與地下一體式沉降監測原理
Hic=Hi+Hig,
(1)
Hig=(hi0-hig)-(hf0-hfg)。
(2)
式中:hi0為初始時刻HLS第i個監測點的儲液罐液位高度(mm);hig為測試時刻HLS第i個監測點的儲液罐液位高度(mm);hf0為初始時刻HLS工作基點的儲液罐液位高度(mm);hfg為測試時刻HLS工作基點的儲液罐液位高度(mm);Hic為地面標或分層沉降標所監測地層的絕對沉降(mm);Hi為HLS工作基點的絕對沉降(mm);Hig為測試時刻HLS第i個監測點相對于工作基點的沉降(mm)。
本沉降監測新方法的實施方式如下:
1)監測裝置組合與安裝。分層沉降標與靜力水準儀的組合方式見圖1。在基準點處,將北斗衛星接收機安裝在基準樁上;在工作基點處,將北斗衛星接收機和靜力水準儀儲液罐安裝至同一工作基點樁上;在監測點處,將靜力水準儀的儲液罐與分層沉降標的測桿同軸連接,置于扶正套筒內;將工作基點處和監測點處的靜力水準儀串聯,并將各儲液罐采用氣體和液體連通管相互連接。
2)監測數據采集與傳輸。BDS基準點和工作基點處的衛星接收機以3~5 s的采樣頻率持續接收衛星信號,再由串行端口傳送至基準點上的無線電臺,無線電臺將衛星接收機實時接收的衛星信號同步傳送至工作基點處的接收電臺,電臺接收基準點數據,結合工作基點處北斗衛星接收機自身觀測數據,在系統內采用載波相位動態實時差分技術對數據進行定位解算,得到厘米級的定位結果,定位結果通過無線通信模塊發送至服務器端。與此同時,HLS以5~10 min的采樣間隔時間,通過無線傳輸模塊將HLS工作基點和監測點的沉降監測數據傳輸至監測中心服務器存儲。
3)監測數據處理與分析。服務器根據BDS所接收的北斗衛星信號數據解算高精度定位結果,求解過程如下:首先,進行衛星信號的周跳測探與修復,確保算法初始化解算時使用的載波相位數據為無周跳的數據;隨后,建立載波相位雙差觀測方程,求解基準點與工作基點之間基線的雙差整周模糊度候選解;最后,使用ratio檢驗法判斷整周模糊度是否可靠,將通過ratio檢驗法的整周模糊度代回方程求解基線矢量,結合基準點的已知坐標,得到工作基點的高精度坐標,完成靜態相對定位解算過程,得到工作基點高精度定位結果。將BDS和HLS觀測數據進行時間同步處理,得到工作基點的絕對沉降量,然后再由式(1)、式(2)計算各監測點的絕對沉降。
2 性能測試
2.1 測試方法
BDS和HLS的精度測試試驗現場如圖2所示。

圖2 精度測試裝置
本次試驗所用的BDS系統為自主集成開發,主要設備配件包括:①接收機:采集北斗衛星數據進行實時動態定位,監測位移和沉降;②北斗天線:用于接收北斗衛星信號;③太陽能控制器:控制蓄電池充、放電;④定時開關:電源開關控制裝置,用于定時重啟;⑤4G通信模塊:將北斗接收機數據發送至服務器。HLS系統采用長沙億拓土木工程監測儀器有限公司生產YT-DG-0310型靜力水準儀,位移測量傳感器為電感調頻式位移計,適用溫度范圍為-20℃~80℃,儀器量程為100 mm,分辨率為0.01 mm。
試驗時,將BDS的北斗衛星接收機的天線與靜力水準儀的儲液罐連接成一體,通過高度游標卡尺調整并測量靜力水準儀儲液罐和北斗天線的高度變化。試驗所用高度游標卡尺量程為200 mm,測量精度為±0.02 mm,遠高于BDS和HLS的觀測精度。
2.2 評價指標
鑒于高度游標卡尺的測量精度遠高于BDS和HLS,為此假定高度游標卡尺的觀測值為“真值”,則BDS、HLS的絕對誤差計算公式為:
(3)
式中:xi為BDS或HLS的觀測值,x′i為高度游標卡尺觀測值。中誤差是衡量觀測精度的一種數字標準,亦稱“均方根差”。本次利用中誤差對BDS和HLS的觀測精度進行直接評價,計算公式為:
(4)
2.3 測試結果
HLS的觀測精度測試結果如表1所示,精度測試曲線如圖3所示。根據前文給出的絕對誤差、中誤差計算公式,得到HLS的絕對誤差范圍為0.16~0.42 mm,中誤差為0.28 mm。根據國家標準《工程測量標準》[17]中對變形觀測點高程中誤差的要求,HLS的中誤差滿足二等以上的變形觀測要求。
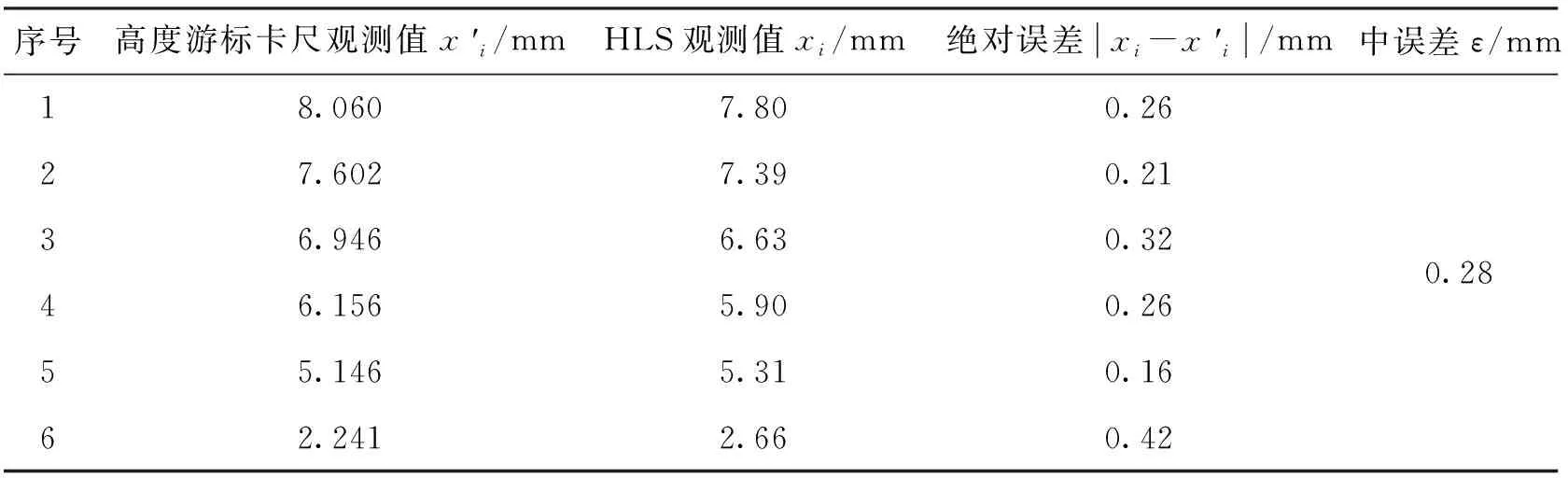
表1 HLS觀測精度測試結果
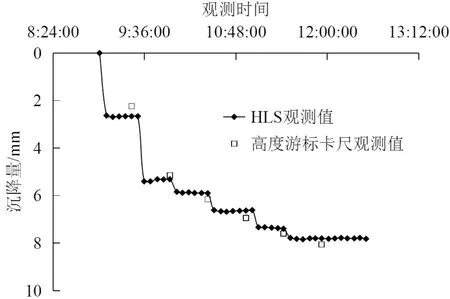
圖3 HLS精度測試曲線
BDS有兩種定位方法:當需要實時動態監測時,采用實時動態差分(RTK)方法,主要用于快速變形或緩慢變形中存在突變的變形體測量,觀測精度為±15 mm+1 ppm;當需要進行高精度變形監測時,采用靜態相對定位方法,主要用于變形緩慢的長期變形監測,觀測精度為毫米級。實際工程中,為判斷靜力水準系統工作基點的穩定性,需要采用高精度的靜態相對定位方法觀測工作基點的沉降變形情況。當衛星歷元數量為14 000組時,BDS的靜態相對定位觀測精度測試結果如表2所示,精度測試曲線如圖4所示,BDS靜態相對定位的絕對誤差范圍為0.39~2.74 mm,中誤差為1.57 mm。
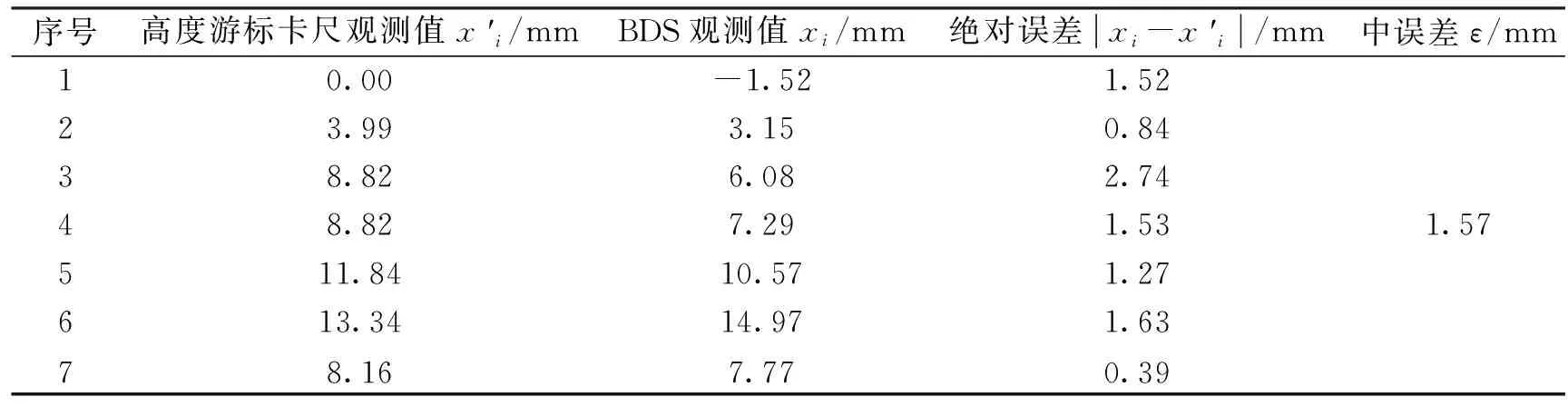
表2 BDS觀測精度測試結果
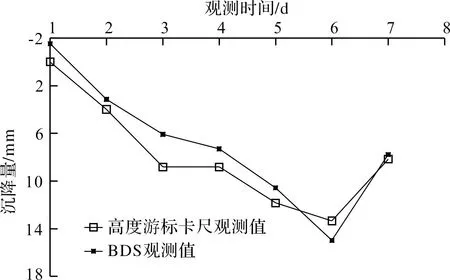
圖4 BDS精度測試曲線
3 誤差分析
3.1 北斗系統測量誤差
目前,對緩變型地面變形采用衛星定位監測時,大多采用載波相位靜態相對定位方法,在理想情況下可獲得較高的定位精度,然而受外部環境和儀器自身條件的限制,往往很多因素會引起定位誤差,例如:①衛星載波相位整周跳變引起的誤差。由于衛星信號暫時阻擋或受外界干擾,經常會出現衛星跟蹤的暫時中斷,發生載波相位整周跳變(簡稱周跳),引起后續一系列載波相位觀測值發生錯誤,從而影響高精度定位結果。②定位數據后處理不當引起的誤差。北斗監測終端設備在不同時段接收到的衛星數據質量受衛星幾何分布、高空大氣誤差和衛星歷元數量等因素的影響,不同時段的定位結果時好時壞,籠統地采用整個時段所有衛星數據給出的一個定位結果,難以獲得高精度定位結果。對上述誤差若不采取一定措施,則無法得到穩定的高精度定位結果。因此,將北斗系統用于高填方場地地表變形監測時,需要降低定位誤差,提高定位穩定性。在北斗變形監測系統監測時,集成應用了一系列消除定位誤差,提高定位精度及穩定性的方法[18-19]。首先,采用貫序極限學習機算法,進行載波相位周跳探測與修復,實現對北斗數據的預處理,保證北斗信號質量;然后,采用載波相位靜態相對定位方法,給出某一時段的高精度定位結果;最后,采用層次分析法對不同時段的定位結果加以分析,并運用分時段加權組合定位的后處理方式,進一步降低誤差,提高定位精度。
3.2 儲液罐傾斜引起的誤差
靜力水準儀的浮體與導桿相連,導桿伸入電感式位移計內隨浮體上下自由運動。當儲液罐發生垂直位移時,浮體會帶動導桿同步發生垂直位移。當儲液罐傾斜發生時,其測量狀態如圖5所示。
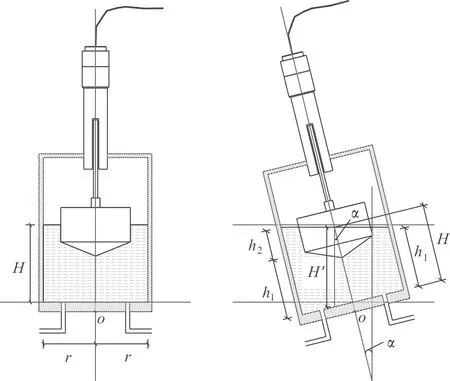
圖5 儲液罐傾斜時的測量狀態示意圖
若假定傾斜前后儲液罐內的液體體積不變,則因儲液罐傾斜導致的測量誤差可由下式計算:
e=H×(secα- 1)。
(5)
式中:e為儲液罐傾斜導致的測量誤差(mm);H為儲液罐豎直狀態時的液位高度(mm);α為儲液罐的傾斜角度(°)。例如,若液位高度為200 mm,測桿傾斜角度為5°,則由儲液罐傾斜引起的傾斜誤差為e=200×(sec 5°- 1)=0.76 mm。
3.3 溫度引起的誤差
1)儀器構件溫度變形誤差的影響。若導桿和儲液罐體分別由鋼和鋁合金制成,溫度膨脹系數分別為α鋼=12.0×10-6/℃、α鋁=23.6×10-6/℃,兩者的溫度膨脹系數相差較大,當桿長為0.2 m,溫差為10℃時,產生溫度變形差為l(α鋁-α鋼)Δt=0.023 2 mm。為減少該誤差影響,儀器應采用膨脹系數相近的材料制成,以減小該項誤差的影響。
2)液體溫差的影響。儲液罐內的液體存在一定的體膨脹系數,當溫度變化時,必將引起液面高度的變化,若這個變化是均勻的,采用自動化觀測,觀測時間基本一致,此時誤差可以忽略,而對于儲液罐體之間的溫度差異的影響,則可在每個儲液罐體中安裝溫度傳感器,實時地測量儲液罐體的溫度,并和測量數據同時采集。對于液體連通管中液體溫度梯度的影響,只要在安裝系統時保證水管的垂直高差足夠小,就可以忽略。若此變化是由于個別連通管局部受熱或遇冷引起的,那么液面將會出現不均勻變化的現象,影響觀測精度。此時,可在測量各容器液體的溫度后對測量結果進行校正。例如,當儲液罐內液體為水時,不同溫度下水的密度為:
ρT=ρ0[1-βw(T-T0)]。
(6)
式中:ρT表示溫度為T時水的密度(g/cm3);T表示水的溫度(℃);T0表示水的初始溫度(℃);ρ0表示初始溫度T0時水的密度值,當溫度為T0= 0 ℃時,ρ0=1.0 g/cm3;βw表示水的體膨脹系數,βw=2.2×10-3/°C。當溫度為20 ℃時,儲液罐內水柱高度為h20,水的密度為ρ20,由于溫度變化導致水的密度變為ρT,此時引起的液面高度變化值為:
Δh=h20(ρ20-ρT)/ρT。
(7)
4 現場應用實例
為驗證本方法的實際應用效果,本次在大面積黃土高填方場地內采用本新方法進行了分層沉降監測,并與傳統光學水準測量結果進行了對比。本次共設置了88.4 m、66.1 m、1.0 m三種不同深度的沉降監測點。監測點設置在溝谷填方區的中心位置,現場勘察結果顯示,試驗點處的原場地上部土層為第四系全新統沖洪積層,下部為侏羅紀砂、泥巖;填筑體所用填充劑為全新世上、中更新統風積黃土及殘積古土壤,其中黃土以粉土為主,古土壤以粉質黏土為主。分層沉降標的沉降板為直徑120 mm、厚度10 mm的鋼板,測桿為直徑32 mm的鍍鋅鋼管,采用直徑150 mm的鉆孔埋設,采用本新方法和水準測量方法同時觀測各分層沉降標測桿的沉降變形。兩種沉降監測方法的沉降觀測曲線如圖6所示,兩種觀測方法觀測曲線的發展規律一致,相同觀測時刻的沉降量差異未超過2.0 mm,但新方法可以自動連續觀測,在觀測頻率、時效性方面遠高于傳統水準測量方法。
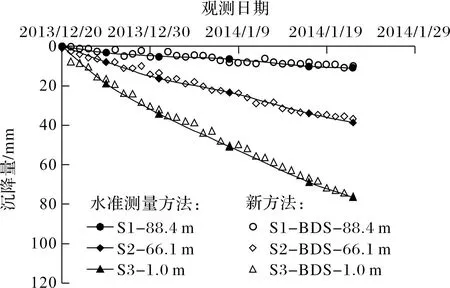
圖6 兩種監測方法的沉降觀測曲線
5 結論與討論
1)本監測方法集合了BDS長距離、全天候、高精度定位,HLS高精度、高頻率監測,以及分層沉降標與被測地層結合性好、可靠性高的特點,實現了地表和地下沉降的一體式監測。
2)本監測方法通過北斗衛星定位系統測定靜力水準測量系統工作基點的高程變化,解決了大面積場地沉降監測中面臨的工作基點校測問題,保證了觀測結果的可靠性。
3)本監測方法的測量誤差來源于北斗系統誤差、儲液罐傾斜誤差、溫度變形誤差等,通過采用貫序極限學習機算法、分時段加權組合定位算法、幾何修正法、溫度修正法等,可降低綜合觀測誤差。
4)本監測方法在某黃土高填方場地的沉降監測中的應用結果表明,在相同觀測時刻,與傳統光學水準測量值之差未超過2.0 mm,未來可推廣用于采空塌陷區、大面積沉降區等的沉降監測。