基于SRCKF 算法的多自由度非線性系統(tǒng)動(dòng)載荷識別方法
2024-01-22 03:24:02龔璟淳陳清華厲硯磊王開云
龔璟淳,陳清華,厲硯磊,王開云
(西南交通大學(xué)軌道交通運(yùn)載系統(tǒng)全國重點(diǎn)實(shí)驗(yàn)室,四川 成都 610031)
準(zhǔn)確快速地識別機(jī)械系統(tǒng)的動(dòng)載荷對系統(tǒng)的振動(dòng)響應(yīng)測量、結(jié)構(gòu)參數(shù)優(yōu)化、疲勞壽命預(yù)測等具有重要意義。對于軌道車輛、飛行器等復(fù)雜非線性系統(tǒng),直接測量輪軌作用力、飛行器外載荷等十分困難。因此,研究識別精度高、響應(yīng)速度快的動(dòng)載荷的間接識別方法具有重要的工程實(shí)用性。
動(dòng)載荷識別方法主要分為時(shí)域識別法和頻域識別法。頻域識別法經(jīng)過多年發(fā)展已較為成熟,其識別精度高但對噪聲敏感,只適用于穩(wěn)態(tài)動(dòng)載荷和平穩(wěn)隨機(jī)載荷[1]。時(shí)域識別法起步較晚,其基本原理是將系統(tǒng)運(yùn)動(dòng)方程進(jìn)行模態(tài)坐標(biāo)變換,將動(dòng)力方程解耦,再根據(jù)卷積后的激勵(lì)與系統(tǒng)響應(yīng)的關(guān)系識別出動(dòng)載荷。武江凱等[2]以二次多項(xiàng)式為基函數(shù),基于Duhamel 積分推導(dǎo)建立了一種針對單自由度振動(dòng)系統(tǒng)的動(dòng)態(tài)載荷識別方法。樊懿葳等[3]在此基礎(chǔ)上通過模態(tài)坐標(biāo)變換法,將多自由度振動(dòng)系統(tǒng)運(yùn)動(dòng)方程解耦,建立了一種以系統(tǒng)加速度為輸入的多自由度振動(dòng)系統(tǒng)動(dòng)載荷時(shí)域識別方法。以上研究均針對線性系統(tǒng),難以解決非線性系統(tǒng)的載荷識別問題。
卡爾曼濾波是一種結(jié)合模型先驗(yàn)估計(jì)和測量更新的狀態(tài)估計(jì)算法[4-6]。馬也馳等[7]基于卡爾曼濾波方法和最小方差估計(jì)方法,分別建立了以系統(tǒng)位移和加速度為輸入?yún)?shù)的激振力時(shí)域識別方法。Impraimakis 等[8]設(shè)計(jì)了一個(gè)新型無跡卡爾曼濾波器,實(shí)現(xiàn)了非線性系統(tǒng)所有動(dòng)態(tài)狀態(tài)參數(shù)和輸入?yún)?shù)的實(shí)時(shí)聯(lián)合識別。LIU 等[9]基于擴(kuò)展卡爾曼濾波方法,引入主成分分析(PCA)方法變換多維區(qū)間模型,建立了一種用于線性系統(tǒng)動(dòng)載荷識別的動(dòng)態(tài)力重構(gòu)方法。許多研究[10-12]表明,卡爾曼濾波在載荷識別方面具有很強(qiáng)的實(shí)用性。
平方根容積卡爾曼濾波(SRCKF)[13]是一種基于三階球面徑向容積準(zhǔn)則和平方根濾波的改進(jìn)卡爾曼濾波算法。穆靜等[14]應(yīng)用SRCKF 算法對未知彈道系數(shù)的再入彈道目標(biāo)實(shí)現(xiàn)了快速精確的狀態(tài)估計(jì)。肖仁鑫等[15]基于SRCKF 算法結(jié)合遺忘因子,對電池荷電狀態(tài)進(jìn)行在線辨識。以上研究表明,在非線性過程問題中,平方根容積卡爾曼濾波算法有較好的估計(jì)效果。
針對鐵道車輛車鉤等存在非線性剛度阻尼的單一維度、多自由度系統(tǒng)的外部動(dòng)載荷,本文提出了一種基于SRCKF 算法的多自由度非線性系統(tǒng)動(dòng)載荷識別方法,通過建立包含動(dòng)載荷的系統(tǒng)狀態(tài)非線性遞推函數(shù),結(jié)合平方根容積卡爾曼濾波算法和系統(tǒng)各部件振動(dòng)加速度響應(yīng)來更新估計(jì)動(dòng)載荷。為驗(yàn)證算法可行性,本文以二自由度非線性彈簧阻尼振子系統(tǒng)為例分析了該算法對隨機(jī)激勵(lì)和組合諧波激勵(lì)的識別效果。
1 非線性系統(tǒng)建模與識別算法
1.1 二自由度非線性彈簧阻尼模型
以具有剛度非線性和阻尼非線性的彈簧振子串聯(lián)振動(dòng)系統(tǒng)為研究對象,如圖1 所示,系統(tǒng)的振動(dòng)方程為
式中:M為系統(tǒng)質(zhì)量矩陣;C為系統(tǒng)阻尼矩陣;K為系統(tǒng)剛度矩陣;X、和分別為系統(tǒng)的位移、速度和加速度向量;F為系統(tǒng)動(dòng)載荷。
在剛度非線性系統(tǒng)中,k1具有非線性特性,如圖2 所示,彈簧力計(jì)算公式為
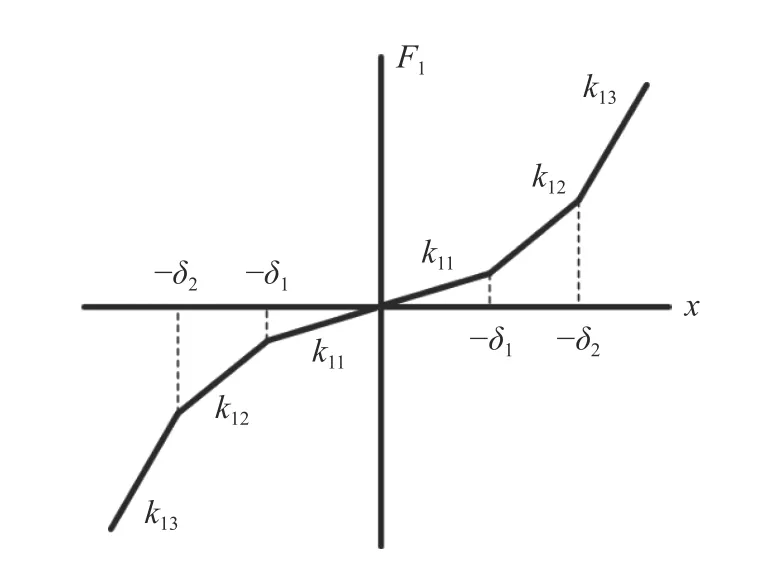
圖2 非線性剛度特性示意圖Fig.2 Diagram of nonlinear stiffness characteristics
式中:k1i(i=1~3)為剛度系數(shù);b為相對位移;δi(i=1~2)為間斷點(diǎn)對應(yīng)位移值;sign()表示對取變量的正負(fù)號。
在阻尼非線性系統(tǒng)中,c1具有非線性特性,如圖3 所示,阻尼力計(jì)算公式為
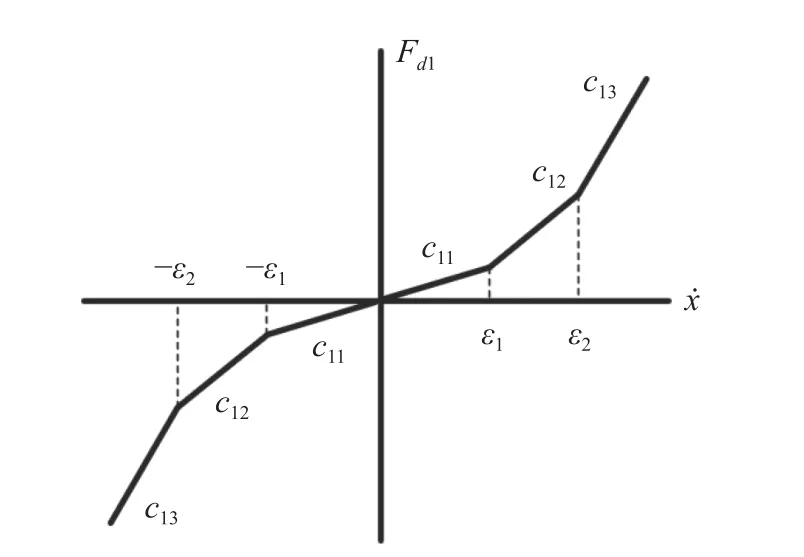
圖3 非線性阻尼特性示意圖Fig.3 Diagram of nonlinear damping characteristics
式中:c1i(i=1~3)為阻尼系數(shù);為相對速度;εi(i=1~2)為間斷點(diǎn)對應(yīng)速度值。
1.2 SRCKF 算法識別原理
對于上述二自由度系統(tǒng)模型,其狀態(tài)變量為
式中:z1、z2分別為質(zhì)量塊m1、m2的垂向位移;、分別為質(zhì)量塊m1、m2的垂向速度。
將振動(dòng)系統(tǒng)所受動(dòng)載荷看作系統(tǒng)內(nèi)在狀態(tài),將狀態(tài)變量擴(kuò)充為
此時(shí)振動(dòng)系統(tǒng)的狀態(tài)空間方程為:
對于系統(tǒng)的位移、速度和加速度響應(yīng),在實(shí)際工程應(yīng)用中,加速度響應(yīng)相比位移和速度響應(yīng)更易測量,因此,選擇系統(tǒng)中各部件振動(dòng)加速度作為系統(tǒng)觀測量,為
實(shí)際上傳感器測量的數(shù)據(jù)為離散采樣,因此,將系統(tǒng)狀態(tài)方程離散化。根據(jù)固定積分步長采用四階龍格庫塔法對遞推式進(jìn)行時(shí)域積分迭代更新。
式中:xk∈Rnx為系統(tǒng)狀態(tài)變量;zk為觀測量。過程噪聲wk-1和量測噪聲vk為相互獨(dú)立的高斯分布,即wk-1~N(0,Qk-1),vk-1~N(0,Rk-1)。
結(jié)合以上公式,采用平方根容積卡爾曼濾波算法對系統(tǒng)動(dòng)載荷的識別流程如圖4 所示。核心步驟是根據(jù)識別的第k-1 步的狀態(tài)變量xk-1遞推出第k步的狀態(tài)變量xk識別值。首先對狀態(tài)變量x0和誤差協(xié)方差矩陣P0進(jìn)行初始化,給定過程噪聲矩陣Q和測量噪聲矩陣R的初始值。然后進(jìn)行時(shí)間更新,通過xk-1計(jì)算容積點(diǎn)Xj,k-1,將容積點(diǎn)代入非線性狀態(tài)方程計(jì)算傳播后的容積點(diǎn),再計(jì)算k時(shí)刻狀態(tài)量預(yù)測值和誤差協(xié)方差矩陣的平方根,為:

圖4 SRCKF 算法流程圖Fig.4 Algorithm flow chart of SRCKF
式中:Sk-1為Pk喬列斯基分解后得到的上三角矩陣;ξj(j=1~m)為容積點(diǎn)集;Tria()表示對矩陣進(jìn)行三角化,獲得矩陣的方陣;為中心加權(quán)矩陣,為
接著進(jìn)行測量更新,根據(jù)k時(shí)刻狀態(tài)量預(yù)測值和誤差協(xié)方差矩陣的平方根計(jì)算容積點(diǎn)Xj,k,將Xj,k代入測量方程進(jìn)行傳播,得到傳播后的容積點(diǎn)Zj,k,再計(jì)算k時(shí)刻的測量量預(yù)測值、測量誤差協(xié)方差矩陣的平方根和誤差協(xié)方差矩陣Pk,為:
式中SR,k為Rk的平方根。γk、χk定義為:
最后,計(jì)算卡爾曼增益Wk、狀態(tài)量估計(jì)值xk和誤差協(xié)方差矩陣平方根估計(jì)值Sk,完成一次狀態(tài)更新。
通過連續(xù)的狀態(tài)更新過程,就能實(shí)現(xiàn)振動(dòng)系統(tǒng)動(dòng)載荷的實(shí)時(shí)識別。
2 算法驗(yàn)證
以圖1 所示的二自由度非線性振動(dòng)系統(tǒng)為例進(jìn)行驗(yàn)證。系統(tǒng)的各部件質(zhì)量為m1=4 kg,m2=8 kg,剛度非線性系統(tǒng)參數(shù)如表1 所示,阻尼非線性系統(tǒng)參數(shù)如表2 所示。

表1 剛度非線性系統(tǒng)參數(shù)Tab.1 Stiffness parameters of nonlinear system
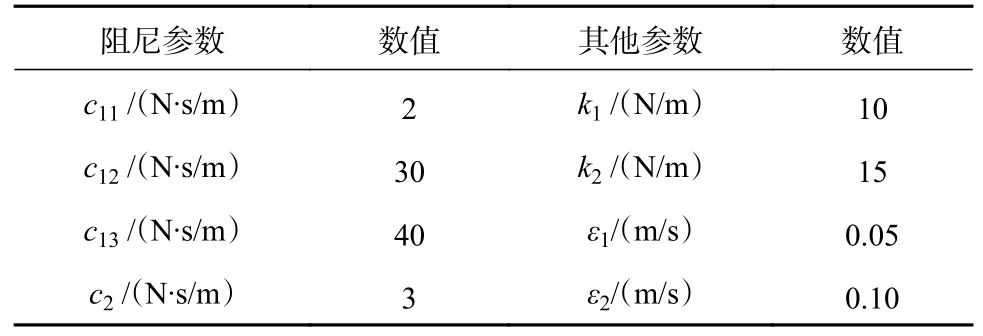
表2 阻尼非線性系統(tǒng)參數(shù)Tab.2 Damping parameters of nonlinear system
采用相關(guān)系數(shù)和均方根誤差值對識別結(jié)果進(jìn)行判斷。相關(guān)系數(shù)能描述識別結(jié)果的變化趨勢,均方根誤差值側(cè)重于衡量真實(shí)值與識別值之間的差異。均方根誤差計(jì)算公式為
式中:y為真實(shí)值;為預(yù)測值;m為觀測次數(shù)。
2.1 隨機(jī)激勵(lì)識別
圖5 為隨機(jī)激勵(lì)作用下剛度非線性系統(tǒng)動(dòng)載荷識別的時(shí)域圖、頻域圖和均方根誤差圖。可以看出,系統(tǒng)動(dòng)載荷的識別曲線和仿真輸入曲線十分接近,識別曲線和動(dòng)載荷曲線的相關(guān)系數(shù)達(dá)0.997。由圖5(b)可知,在動(dòng)載荷高于0.8 Hz 頻段時(shí)識別結(jié)果十分準(zhǔn)確,低于0.8 Hz 頻段識別結(jié)果存在較小誤差。由圖5(c)可知,在識別過程開始時(shí),均方根誤差達(dá)到最大值17.553 N,隨后快速減小并穩(wěn)定在2.052 N 以下。

圖5 剛度非線性系統(tǒng)隨機(jī)激勵(lì)識別結(jié)果圖Fig.5 Results of random excitation identification for nonlinear stiffness systems
圖6 為隨機(jī)激勵(lì)作用下阻尼非線性系統(tǒng)動(dòng)載荷識別的時(shí)域圖、頻域圖和均方根誤差圖。從圖6(a)可以看出,識別曲線和真實(shí)曲線大致重合,相關(guān)系數(shù)達(dá)0.999。圖6(b)的頻域結(jié)果表明,在各個(gè)頻段識別效果都很好。圖6(c)顯示均方根誤差在識別過程開始時(shí)出現(xiàn)最大值1.258 N,隨后急劇減小并穩(wěn)定在0.033 N 以下。
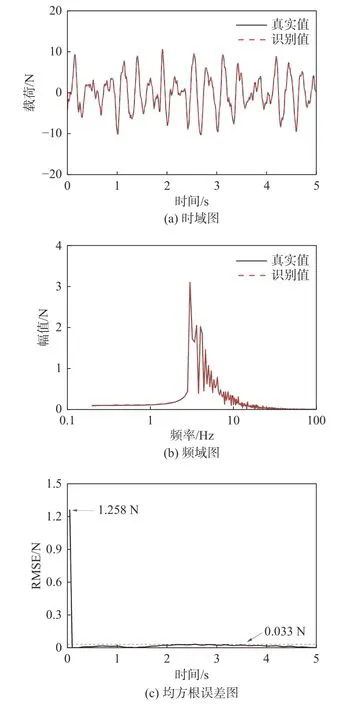
圖6 阻尼非線性系統(tǒng)隨機(jī)激勵(lì)識別結(jié)果圖Fig.6 Results of random excitation identification for nonlinear damping systems
2.2 組合諧波激勵(lì)載荷識別
圖7 為對剛度非線性系統(tǒng)施加頻率為1、2、3、5 和7 Hz 的組合諧波激勵(lì)時(shí)的動(dòng)載荷識別結(jié)果。圖7(a)的動(dòng)載荷時(shí)域識別圖表明,識別曲線和動(dòng)載荷曲線變化趨勢一致,相關(guān)系數(shù)為0.997。圖7(b)的頻域動(dòng)載荷曲線和識別曲線的對比可知,在頻率大于0.8 Hz 時(shí)識別效果較好,在小于0.8 Hz 時(shí),隨著頻率的減小,識別誤差逐漸增大。由圖7(c)的系統(tǒng)動(dòng)載荷曲線和識別曲線的均方根誤差可知,識別過程中均方根誤差存在一定波動(dòng),最大值為0.866 N,均方根誤差整體處于較低的水平。

圖7 剛度非線性組合諧波激勵(lì)識別結(jié)果圖Fig.7 Results of harmonic excitation identification for nonlinear stiffness systems
圖8 為對阻尼非線性系統(tǒng)施加頻率為1、2、3、5 和7 Hz 的組合諧波激勵(lì)時(shí)的動(dòng)載荷識別結(jié)果。圖8(a)表明,識別曲線和真實(shí)曲線基本重合,二者的相關(guān)系數(shù)達(dá)0.999。由圖8(b)可以看出,在頻率大于0.8 Hz 時(shí)識別曲線和動(dòng)載荷曲線基本重合,在頻率小于0.8 Hz 時(shí)識別幅值偏大。從圖8(c)可以看出,識別值與真實(shí)值的均方根誤差隨識別過程不斷變化,其最大值為0.234 N,整體收斂在一個(gè)較低的水平。

圖8 阻尼非線性系統(tǒng)組合諧波激勵(lì)識別結(jié)果圖Fig.8 Results of harmonic excitation identification for nonlinear damping systems
3 結(jié)論
本文基于SRCKF 算法提出了一種多自由度非線性振動(dòng)系統(tǒng)動(dòng)載荷的識別方法,并通過二自由度的剛度非線性和阻尼非線性的彈簧阻尼振子系統(tǒng)對算法進(jìn)行了驗(yàn)證。
1)在剛度非線性系統(tǒng)上施加隨機(jī)激勵(lì)和組合諧波激勵(lì)時(shí),識別曲線與輸入載荷曲線相關(guān)系數(shù)均達(dá)0.997。在阻尼非線性系統(tǒng)上施加隨機(jī)激勵(lì)和組合諧波激勵(lì)時(shí),識別曲線與輸入載荷曲線相關(guān)系數(shù)均達(dá)0.999。
2)在頻率大于0.8 Hz 的頻段,識別結(jié)果與輸入載荷基本吻合。在小于0.8 Hz 的低頻段,識別結(jié)果存在一定誤差。
3)對于隨機(jī)激勵(lì),識別結(jié)果的均方根誤差的最大值出現(xiàn)在識別初始時(shí),隨著識別過程的進(jìn)行,識別的誤差逐步收斂至較低的水平;對于組合諧波激勵(lì),識別結(jié)果的均方根誤差存在小幅波動(dòng),整體處于較低水平。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
