基于云平臺的全向移動機器人控制系統設計
2024-01-23 07:32:32王李孫
物聯網技術 2024年1期
李 剛,王李孫
(廣西大學 電氣工程學院,廣西 南寧 530004)
0 引 言
移動機器人以其具有靈活性、能夠提高生產效率和改善勞動條件等優點而得到廣泛應用[1]。常見的移動機器人的移動機構有很多種,包括輪式、腿式和復合式等。其中,由于輪式移動機器人的結構設計與控制方式相對簡單,被廣泛使用于各種工作環境[2]。而市場上的輪式移動機器人大多采用差速轉向、兩輪驅動的工作方式[3],雖然它們可以到達工作場景下任何方向和位置,但由于它們輪子的非完整約束特性,其運動能力受到限制,需要復雜的操作和軌跡規劃[4]。
本文為了提高輪式移動機器人的環境適應性和靈活性,設計了移動機器人的四輪獨立驅動轉向遠程控制系統。該系統可以實現移動機器人縱向直行、橫向直行、斜向直行、原地旋轉和四輪轉向等多種行車方式;并在此基礎上使用云服務器搭建物聯網節點,實現遠程控制。
1 遠程控制系統設計
全向移動機器人遠程控制系統結構如圖1 所示,主要由手機應用程序、云服務器、底層控制器、電機驅動系統、監控系統組成。工作人員通過操作手機應用程序發送指令,由云服務器傳達指令,底層控制器接收并解析指令,最終實現移動機器人的行走、轉向等運動。
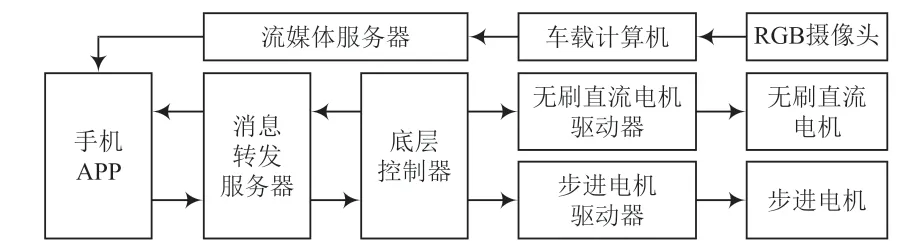
圖1 總系統結構設計框圖
1.1 云服務器搭建
遠程無線通信的核心部分是云服務器。云服務器是基于阿里云平臺以及Linux 系統搭建設計,包括消息轉發服務器和流媒體轉發服務器,能夠確保全天24 h 無間斷穩定工作[5]。消息轉發服務器在確認客戶端連接成功后,會自動回復“成功連接”字樣。為方便管理員管理設備連接,將不同控制系統與上位機進行ID 捆綁。在數據傳輸時,控制系統將執行設備上的數據上傳至服務器。服務器根據ID 號,將數據發至指定上位機實現數據指令的遠程交互。流媒體轉發服務器利用公網IP 把執行設備的實時視頻流封裝成一個公網可訪問的RTSP 流地址。手機上只需要點開APP 內的播放器即可實現在線監視。
1.2 手機應用程序設計
遠程控制中的手機應用程序是基于安卓系統平臺,以JAVA語言為基礎,使用谷歌公司的Android-Studio集成開發工具開發[6],其主要功能是通過手機終端與云服務器的連接實現移動機器人的遠程控制,同時獲取移動機器人的監測數據。程序界面設計主要包括兩部分:首先,考慮到四輪獨立驅動與四輪獨立轉向的原因,移動機器人在初次使用時需要校正車輪零位,所以單獨設計了調車界面,方便工作人員根據現場自主設定初始位置,如圖2(a)所示;其次,工作人員需要根據周圍環境實時改變行走路徑,故設計了RTSP 視頻流地址播放器,如圖2(b)所示,實時轉播移動機器人的攝像頭傳輸回來的視頻信號。
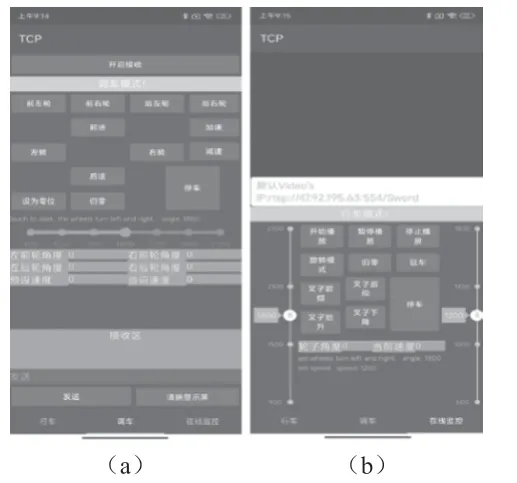
圖2 手機APP 設計頁面
1.3 底層控制器設計
移動機器人的底層控制器設計采用模塊化的思想[7-8],按照功能要求,主要將底層控制電路分為電源部分、通信部分、檢測部分、繼電器隔離部分以及主控制器,這樣不僅便于安裝,也便于后續升級、維修電路等。同時,考慮到車身過大,單控制器可能出現主程序運行不穩定,車身走線繁雜等問題,系統采用雙MCU 結構,設計成主從式分布結構,主從板同時處理左右側信號并通過CAN 總線進行通信和協調工作。底層控制電路結構如圖3 所示。
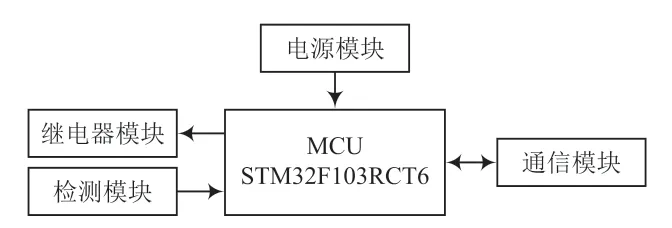
圖3 系統硬件電路設計
以ARM Cortex-M3 內核的STM32F103RCT6 控制器作為控制核心,程序存儲器容量為256 KB,具有64 個引腳,支持I2C、SPI 和串口等外設[9];電源模塊的60 V 輸入電壓由車載鉛酸蓄電池提供,5 V 和3.3 V 輸出電壓分別由LM2596 和AMS1117-3.3 V 模塊提供,為各類傳感器、控制器以及電機等用電模塊供電;通信模塊設計包括WiFi 無線通信、CAN 總線通信,WiFi 無線通信電路負責與云服務器進行數據交互,CAN 總線通信電路負責左右兩側的單片機的數據交互;檢測模塊包括絕對值編碼器和增量式編碼器,絕對值編碼器用來檢測各個車輪角度,增量式編碼器用來檢測各個車輪速度;繼電器模塊用來連接主控制器與電機驅動器,以解決二者電平不匹配的問題。
1.4 控制系統程序設計
控制系統程序包括上電后各個模塊的初始化、通信模塊的數據發送與接收、移動機器人動作控制以及數據檢測模塊讀取到的數據信息的處理分析。
系統的初始化包括主控的定時器、串口、SPI 總線、CAN 總線、GPIO 引腳和ESP8266 的初始化;通信模塊的數據發送與接收主要包括ESP8266 與云服務器的數據傳輸和發送。
系統程序主要包括無線模塊數據發送與接收以及叉車行走過程中的邏輯判斷,包括車輛轉向、輪子正位等。為防止系統出現由于信號不穩定等特殊情況造成的車輛與服務器的斷開連接,在初始化階段加入STM32 內部的窗口看門狗程序[10],若超過2 s 沒有來自服務器的響應,系統將會重新發送連接指令,直到重新與服務器連接上為止。控制程序流程如圖4 所示。
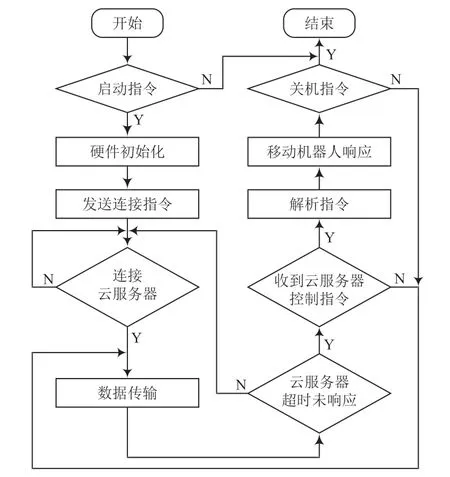
圖4 系統主程序流程
為了實現移動機器人的動作控制,操作人員只需要點擊相應按鈕發送指令就可以實現移動機器人的行走、停車、轉向等操作。其中指令包含狀態指令、動作指令,狀態指令旨在將移動機器人狀態進行改變,動作指令旨在控制移動機器人在某一狀態下的動作方式。另外,在一些網絡狀況不好的區域,為保證安全,加入報警模式,使得移動機器人在斷開連接后,操作端能夠及時發現問題并解決。
2 四輪獨立驅動轉向控制設計
2.1 四輪獨立轉向控制原理
作為轉向模型中常用的控制手法,阿克曼原理指在忽略側向力、傾斜等因素的理想狀態下,所有車輪的旋轉中心線最終交于一點,保證車輛在移動中發生轉向,車輪做純滾動而不發生側滑[11]。基于阿克曼原理,本文設計的全向輪式移動機器人具有縱向直行、橫向直行、斜向直行、原地旋轉和四輪轉向等多種運動狀態,因此具有更高的靈活性、更小的轉彎半徑以及更高的環境適應能力。
目前,四輪轉向技術的研究主要分為低速轉向模型和高速轉向模型[12],二者主要以行駛速度作為區分。高速行駛時,為防止因出現較大偏側角而引起側傾翻,前后輪偏轉方向需要保持一致,實現同相位轉向。由于本文設計的全向輪式機器人主要應用場景為一些狹窄、不方便人工直接操作的作業環境,需要限制機器人的移動速度,故僅考慮低速模型即可。低速時,前后輪偏轉角度相等、方向相反,實現逆相位轉向[13-15],以獲得更小的轉彎半徑,具體實現方式如圖5 所示。

圖5 低速四輪轉向模型
以移動機器人右轉為例,依照圖5 中的低速四輪轉向模型中的幾何關系,可以得到移動機器人4 個車輪轉向時偏轉角關系滿足式(1)。
式中:θi(i=1, 2, 3, 4)分別為4 個直流電機的轉向角大小;W為左右輪輪距大小;L為前后輪輪距大小。
根據式(1),通過設置外側輪的轉向角,則可以進一步計算出機器人的內側輪轉向角。以右轉為例,左側輪為外側輪,則有:
由于低速四輪轉向模型中,同側車輪轉向角方向相反、角度相等,因此可以得到每個控制轉向的旋轉角度,以及對應的旋轉方向。
2.2 四輪獨立驅動控制原理
在全向移動機器人的轉向過程中,理論上是其圍繞ICR(瞬時旋轉中心)做圓周運動,內外側輪轉向半徑不同,因此轉向過程中內外側輪的線速度大小也不相同。由于一般的移動機器人多是采用后輪驅動的方式,在轉向過程中內外側輪的驅動力矩相同,會產生額外的橫擺力矩,容易導致輪胎發生相對滑動[16]。
為解決上述問題,全向移動機器人在四輪獨立的基礎上增加了四輪獨立驅動控制,根據移動機器人的各個車輪轉向角度以及移動機器人質心速度大小確定各輪所需實際轉速,使其與傳統輪式移動機器人相比具有更大的優勢[15,17]。
根據上文中的低速四輪轉向模型,可以得到:
式中:Ri(i=1, 2, 3, 4)為4 個車輪轉彎半徑;r為內側輪到ICR(瞬時移動中心)的距離。
由V=ωr可得:
式中:vi(i=1, 2, 3, 4)分別為4 個直流電機的線速度大小;ω為轉向時移動機器人的向心角速度。
根據式(4),設置外側輪轉向時速度大小,結合內外側輪轉向角度,就可以通過計算得到內側輪轉向過程中的轉速大小。以右轉為例,可得:
2.3 四輪獨立驅動轉向控制算法實現
四輪獨立驅動轉向具體控制策略如圖6 所示。圖中γi(i=1, 2, 3, 4)分別表示移動機器人4 個移動輪的給定角度;γif(i=1, 2, 3, 4)分別表示移動機器人4 個移動輪的實時檢測角度;vi(i=1, 2, 3, 4)分別表示移動機器人4 個移動輪的給定速度;vif(i=1, 2, 3, 4)分別表示移動機器人4 個移動輪的實時檢測速度。由式(2)和式(5)可知,控制移動機器人轉向操作僅需要輸入某一個移動輪的轉向角度和移動速度,控制系統就可以解算出其余3 個移動輪的轉向角度和移動速度。程序根據解算出來的結果,結合相應的模塊控制器,從而實現移動機器人的四輪獨立驅動轉向的控制。
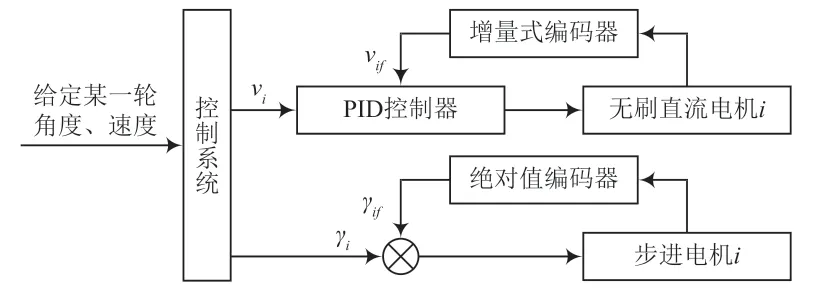
圖6 四輪獨立驅動轉向具體控制策略
為防止因負載不一致影響各個驅動電機的轉速,在原有的開環控制系統中加入PID 控制器進行閉環控制,保證移動機器人穩定運動。其中,為獲取無刷減速電機實際轉速,在電機上加裝分辨率為2 000 P/R 的增量式旋轉編碼器。控制系統獲取移動輪實際轉速,將之與設定值一起送入PID 控制器,通過試驗整定PID 參數,最后實現無刷電機的穩定驅動。相對于無刷直流電機的控制,步進電機僅需保證固定速度轉向即可。但為了防止在控制步進電機轉動時出現丟步,加裝絕對值編碼器,實時檢測移動輪的角度位置。
3 實物樣式與試驗
3.1 系統搭建與實物樣式
根據設計的總體需求,所搭建的全向移動機器人遠程控制系統包括全向的移動機器人、硬件控制板、云服務器系統以及安卓APP。移動機器人實物如圖7 所示。實物前后移動輪軸距1.315 m,左右輪軸距為1.490 m。
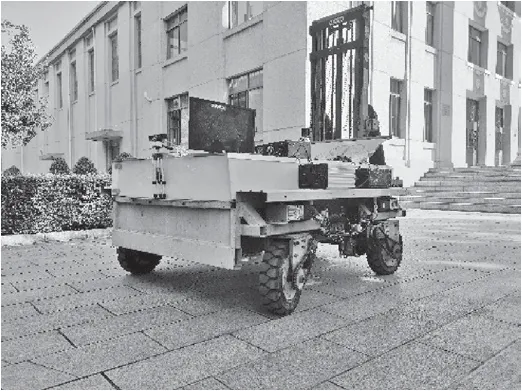
圖7 全向移動機器人實物圖
3.2 控制系統可靠性試驗
控制系統的可靠性試驗主要包括測試系統能否長時間穩定運行、測試移動機器人能否完成指令要求、報警模式響應時間以及測試控制過程中在線監視功能的延遲時間。
在測試系統能否長時間穩定運行的試驗中,以電池滿電到完全耗盡電量總計4 h 為標準。在一次完整的電池放電時間內,出現系統斷開連接次數小于等于1 次,且在斷開連接后能夠在4 s 內重新恢復通信。
遠程控制移動機器人進行指令完成度的測試過程中,移動機器人對于各個運動指令均能較好地實現基礎要求,且響應時間小于200 ms。
報警模式響應時間的測試過程中,為判斷何時網絡變差,測試中人為斷開網絡,測量報警模式響應時間。響應時間見表1 所列。

表1 報警模式響應時間
在線監視功能的延遲時間的測試主要通過現場測試人員與手機端操作人員進行時間上的比對。分別在一次移動機器人行駛的初始時間、運行0.5 h 后、運行1 h 后以及運行2 h后四個時間點進行測試。測試結果見表2 所列。

表2 視頻延時測試結果
根據表2 所測量的數據,在網絡信號良好的情況下,視頻延時基本穩定在1.2 s 左右,對低速運行的移動機器人的影響不大。
試驗結果表明,移動機器人能夠長時間地穩定運行,且對指令的完成度良好以及其在線監視功能的延時性很低。整體而言,控制系統具有較高的可靠性。
3.3 四輪轉向試驗
進行四輪轉向測試實驗時,遠程控制移動機器人在運動模式下以1 m/s 的固定行駛速度低速行駛。移動機器人四輪轉向測試實驗中,加入前輪轉向實驗進行對比。轉向實驗的測試內容為固定移動機器人的內側輪轉向角時,測試移動機器人內側輪的實際轉彎半徑。測試的6 組數據見表3 所列。表中左轉為負,右轉為正。
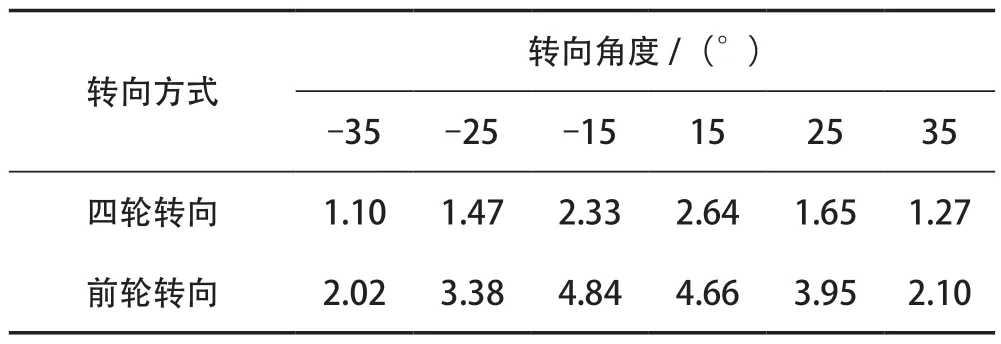
表3 轉彎半徑測試結果 單位:m
實驗結果表明,與前輪轉向相比,四輪轉向極大地減小了移動機器人的轉彎半徑。
4 結 語
本文根據全向移動機器人的運動特點,設計開發了一套全向移動機器人的遠程控制系統,實現了遠程無線控制各個移動輪的行走和轉向。實驗結果表明,本文所設計的全向移動機器人相對于傳統移動機器人擁有更小的轉向半徑,可以在不改變車身方向的同時進行斜行,甚至可以實現原地旋轉,在不同的工作環境中有著更好的適應能力。遠程控制時,該系統運行穩定、響應速度快,一定程度上降低了人力成本和人工現場作業的危險系數;也為下一步在全向移動機器人上繼續搭載視覺導航等系統,實現路徑規劃以及無人駕駛等功能奠定了基礎。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
