地鐵全自動運行模式下司機配置方案研究
2024-02-17 00:00:00劉光勇
交通科技與管理 2024年24期
關鍵詞:融合

摘要 全自動運行系統給地鐵的傳統運營管理模式帶來較大挑戰,司機崗位的職能發生改變,需要進行崗位調整與人員分流。文章首先基于深圳地鐵20號線的管理運營經驗和需求,根據全自動運行系統特征,提出了四種調整司機崗位的管理方法;然后通過綜合評價分析,選出司機與車輛檢修工崗位融合的最優方案;最后通過20號線的實際運行情況,驗證了崗位融合配置方案的可行性。
關鍵詞 地鐵;全自動運行;崗位融合;司機配置
中圖分類號 U29-3 文獻標識碼 A 文章編號 2096-8949(2024)24-0177-04
0 引言
全自動運行系統(FAO)融合了通信、計算機、控制、系統集成等技術,實現了列車行駛全過程與調度管控的無人化、自動化,代替了傳統列車運行模式下的司機職能[1-2]。《中國城市軌道交通全自動運行系統技術指南(試行)》提出[3],可將軌道交通線路的自動化運營程度定義為5個等級,從低到高依次為GoA0至GoA4,其中GoA3是有人值守下的全自動運行(DTO),GoA4是無人值守下的全自動運行(UTO),以上兩個等級均屬于全自動運行模式。
GoA4等級的全自動運行模式對技術和管理要求嚴苛,在設備系統層面要求高度集成化、自動化和智慧化,安全防護層面要求高可靠和高冗余性,中心控制層面要求實時性和全過程覆蓋[4]。由于GoA4等級的極高要求較難滿足且需要實踐驗證,通常情況下以FAO標準建設的軌道交通線路在運營初期通常會選擇GoA3等級作為過渡[5]。運行模式的改變通常伴隨著崗位變動與人員分流,崗位需要匹配系統的自動化水平要求,且能夠及時響應故障與安全事故,在需要時通過人工介入以提高系統可靠性,由此引出了崗位配置與員工技能培訓的難題。
全自動運行線路在運營期間存在從GoA3等級過渡到GoA4等級的階段,該文研究該階段下司機崗位的職能變化與崗位配置的變更情況,通過對比分析多個過渡方案,結合深圳地鐵全自動運行線路20號線的管理實踐經驗,選出其中穩定可控、效果顯著的可行方案。
1 自動化運行等級提升的過渡方案
1.1 GoA4等級的特征與技術要求
地鐵全自動運行等級GoA4采用UTO模式,比現有的基于通信的列車運行控制(CBTC)系統具備更高的安全性和運行效率[1]。GoA4等級對設備、人員、通信、系統、中心控制等各方面要求極高,對比CBTC系統具有如下鮮明特征:
(1)設備系統層面集成化、自動化、智慧化。GoA4等級的全自動運行要求信號、車輛、通信、站臺門、綜合監控五大行車核心專業設備應滿足智能協調、聯合控制的效果,實現智能協同應急響應與輔助決策。通過設備與系統的智能協調控制,車載信號具備蠕動運行、遠程重啟、遠程限速等模式作為應急協同控制方式。進一步地,GoA4等級的全自動運行可實現全過程閉環的綜合運維管理,自動完成喚醒、自檢、出庫、正線運行、回庫等運維流程。
(2)安全防護層面高可靠、高冗余性。為保證FAO系統的穩定與安全,需通過車輛與站臺門的協調控制與正線的實時監控,以實現軌行區的全封閉管理。同時,GoA4等級要求對線網、隧道及軌道進行實時、高速、高精度的自動化缺陷檢測和報警。最后,中心控制的遠程監控也是維持FAO系統安全的主要組成部分。
(3)中心控制層面實時性、全面、全過程。中心控制的綜合監控作為串聯車輛、電力、人員、維修等調度的總線,需要通過高度智能化的數據傳輸與實時渲染,保證監控數據的瞬時刷新與短周期,為中心控制提供實時性、全過程的輔助決策和應急聯動。此外,中心控制還應兼顧列車操控、環境感知和乘客服務,給出全面的智能化協調控制解決方案。
總而言之,GoA4等級下的專業設備需要具備高自動化水平、高可靠性,同時要求正線段場的行車一體化、中央調度指揮的一體化,且滿足無人駕駛、無人值守的安全要求。在GoA4等級的全自動運行模式下,原司機崗位職責將被智能調度與自動化設備取代。
基于多種因素考量,尤其在崗位調度管理方案可行性與專業設備可靠性未經實際運營檢驗的前提下,深圳地鐵20號線在開通初期并不會直接實施GoA4等級的無人值守運行模式,而是先依據GoA3等級的有人值守運行模式實施運營,依靠管理手段逐步實現自動化運行等級的提升,未來通過多次專項評估與調整平穩過渡至GoA4等級。
1.2 全自動運行模式過渡階段的方案對比
深圳地鐵20號線在運營初期選擇有人值守運行模式,該模式下的部分場景中需要值守人員快速介入,例如調試階段及運營前期需對設備系統、安全防護和中心控制的各層面進行驗證優化,此外在非正常情況下(降級模式下的駕駛、救援、區間迫停疏散)需現場就地控制,因此仍有必要設置司機崗[6-8]。在此前提下,全自動運行系統中的司機崗位與既有線相比有較大差異,因此需要通過崗位復合保證生產工作的飽和度,還需要優化人員配置并重新定位和培養綜合技術人員,以適應全自動運行系統的特點。
在以GoA3等級自動化運行的前提下,根據深圳地鐵既有線上的司機崗位配置現狀,該文提出如下四個備選的司機崗位調整方案,以適應全自動運行模式的要求:
方案一:司機專崗。在既有線司機管理模式及崗位配置基礎上,考慮FAO系統中值守人員工作飽和度不足的情況,將仍然保留司機專崗負責值守列車運行,通過核減崗位數將原有的5.8人/車的人車標配比進一步降低。該方案的優點,一是與既有線保持相同的崗位配置,確保了隊伍的穩定可靠,便于運行管理;二是目前的崗位培訓體系已經成熟,司機專崗專職無需額外培訓。該方案的缺點很明顯,一是與全自動運行模式需求及運行改革的方向不匹配;二是司機負責的業務單一,導致后續階段轉崗難度大。
方案二:司機與站務員融合。將列車司機與車站站務員的職能復合,統一歸屬站務管理,司機在不改變列車值乘方式的前提下,兼顧站務員部分的關聯業務。預計在沿線站點均預留該復合崗位,每站配置4名多職能司機。該方案的優點,一是司機與站務員同屬客運服務方向,其業務具有一定的互通性,在崗位融合后便于運行管理;二是司機歸屬站點管理,可以實現屬地管理一體化,在處理行車故障時可通過站-車應急聯動提升處置效率。該方案的缺點,一是車站工作的固定性與司機工作的流動性存在矛盾,導致崗位融合難度較大;二是車站需為司機復合崗預留崗位配置,影響車站正常運轉,且在車站編制已滿的情況下無法為司機調整崗位。
方案三:司機與車輛檢修工融合。將司機與車輛檢修工的崗位融合,合并構成新崗位“車輛運維工”,負責車輛調整、車輛檢修、故障處理及降級模式下的駕駛、救援、區間迫停疏散等工作。該方案的優點是可降低用人成本,提高生產效率,保證應急處置的安全高效,同時司機的工作范圍擴大,可為其提供廣闊的轉崗空間。該方案的缺點是強調操作性的司機崗位與強調技術性的維修崗位,在業務范圍上無重合點,難以直接進行業務融合,需要提出針對該復合崗位的培訓方案,并敦促員工接受轉崗技能培訓。
方案四:隨車值乘外包(勞務公司/廠家駐點)。隨車值守人員可通過第三方勞務派遣公司招聘,或從車輛廠家的駐點人員中選拔,在地鐵公司骨干員工的派駐管理下,高效穩定地培養輸出合格司機。深圳地鐵僅負責列車運營,由勞務派遣公司或車輛廠家的專業團隊負責值守司機的管理工作。在值乘外包的前提下,安全卡控工作需由車輛檢修工與值站人員負責,例如車輛檢修工需要進行人工駕駛壓道測試,值站人員需具備列車引導資格且在降級模式下隨車監督。該方案的優點,一是外包值乘人員不占用編制,地鐵運營方可以靈活用人;二是降低了用人成本;三是通過勞務派遣公司校招或在社會就業者中擇優錄取,通過車輛廠家專業的人力資源管理,可保證值乘隊伍具有較高素質;四是保留了司機與列車安全員崗位融合的可能性。該方案的缺點是外包隊伍相對于正式編制員工的穩定性不足。
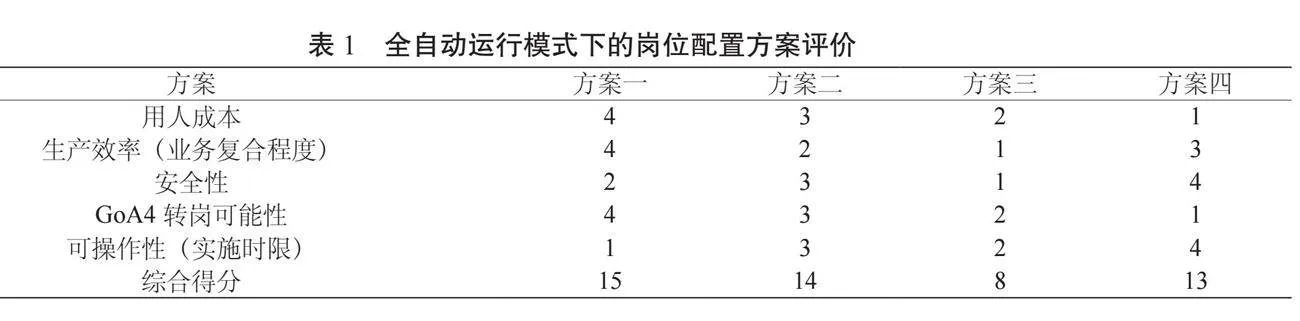
采用專家評分法為全自動運行模式過渡階段的司機崗位配置方案進行綜合評價,通過直觀的評價分數分析各方案的優劣,并據此選出最適合深圳地鐵20號線的崗位配置方案。如表1所示,專家打分采用5分制,且分數越低代表該方案在對應項目上更有優勢,因此綜合得分最低的方案即最優方案。
由表1可知,深圳地鐵20號線應選方案三,即司機與車輛檢修工融合作為GoA3等級下全自動運行模式過渡階段的崗位配置方案。同時,若能通過規范化安全卡控解決安全問題,并在運營的同時開展值乘外包培訓,提高方案四在安全性與可操作性方面的優勢,則可將方案四作為過渡至GoA4等級前的最終方案,全面降低UTO模式下的人員轉崗難度。
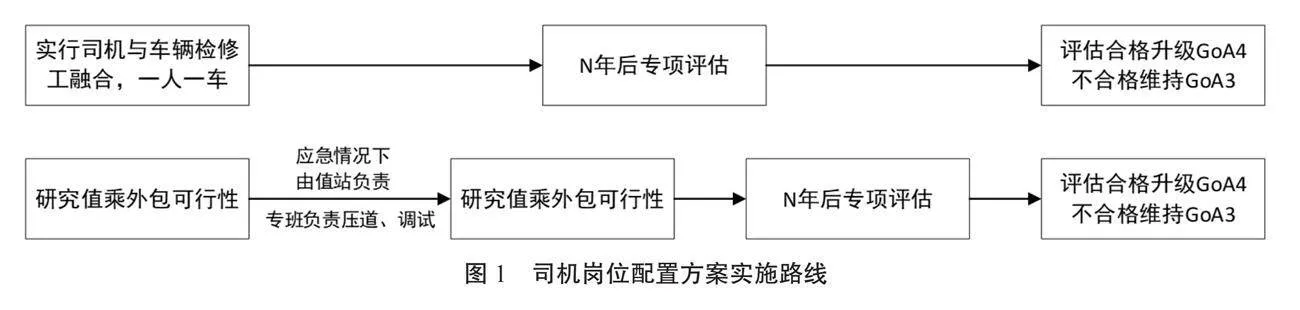
1.3 備選方案的實施路線
根據該文1.2部分對各類崗位配置方案的綜合評價結果,深圳地鐵20號線在GoA3等級下可采用司機與車輛檢修工融合或隨車值乘外包的方案。如圖1所示,兩個方案在經過數年的實踐驗證后需要進行相應的專項評估,在評估合格的情況下深圳地鐵20號線可考慮將自動化運行等級提升至GoA4。
2 地鐵司機崗位融合配置情況
2.1 深圳地鐵20號線運行模式與崗位配置問題
在列車自動化等級逐漸提升的背景下,司機是受影響最大的崗位:GoA2等級的半自動列車需要司機監視和操控;GoA3等級的DTO模式中司機的職能被淡化,需兼顧隨車值守職責;GoA4等級的UTO模式不需要值守人員。在GoA3等級的運營模式下,若由傳統的司機崗位完成值守工作,會造成人員冗余和勞動力浪費,且對應的人員配置難以直接過渡到GoA4等級。
深圳地鐵的四期建設規劃及其調整線路(包括20號線、16號線、14號線及6號線支線)擬采用FAO模式建設和運行,其中20號線已于2021年12月底率先開通運營[9]。20號線作為深圳地鐵最先試行全自動運行模式的線路,為保證列車運行由傳統的司機駕駛模式向DTO模式、UTO模式的平穩過渡,20號線在車輛和站點人員配置上需做出適應性調整:司機與車輛檢修工融合。
2.2 基于職能融合的司機崗位架構模式
考慮專業協同性和空間布局因素,20號線將司機與車輛檢修工的崗位融合,合并成新崗位“車輛運維工”,在囊括原有職責的前提下,根據全自動運行模式做出優化調整,包括車輛調整、車輛檢修、故障處理及降級模式下的駕駛、救援、區間迫停疏散等工作。
融合后的具體崗位所需人員顯著減少。傳統的司機崗位需隨列車在正線兩端折返,且根據具體職責分為設備員、督導、隊長、組長等崗位;融合后的車輛運維工崗位僅保留傳統模式下的隊長職責,并優化調整為班組長崗位,班組長僅需值乘列車一端折返。
2.3 崗位融合可行性分析
深圳地鐵20號線在規劃設計階段便督促相關崗位人員進行跨崗培訓,運營初期階段全面應用司機與車輛檢修工融合的崗位架構模式,其可行性得到了初步檢驗。
(1)人力成本。傳統崗位配置人員數量與運行列車數量相關:20號線運營初期計劃配屬9列車,其中7列上線運行,每列車配8節車廂,傳統崗位平均每節車廂標配0.54名檢修工,每列上線運行列車標配5.8名司機,共需39名檢修工和41名司機。實行崗位融合策略的20號線將原班組進行調整重組,最終保留車輛運維工47名,由22名原檢修工和25名原司機劃轉構成。如表2所示,傳統模式20號線的人車配比為8.9人/車,崗位融合后的人車配比降為5.2人/車,崗位數量降幅達到41.3%,按深圳地鐵12.8萬元/人的平均薪資水平測算,崗位融合方案每年可節省422.4萬元的人力成本。
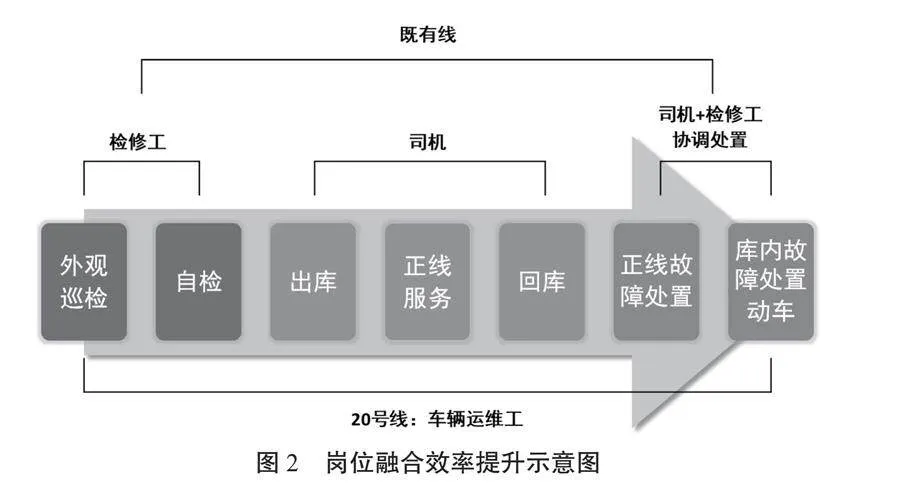
(2)效率提升。依托全自動運行模式的全過程最優化、自動化控制及可靠的安全防護功能,司機與檢修相關崗位的工作強度將顯著降低,保證車輛運維工可單崗完成列車的運檢及故障處理等一系列作業。如圖2所示,傳統崗位配置需分中心、分崗協調作業,檢修工與司機分別負責列車運營的不同階段,在突發狀況如正線故障處置或庫內故障處置動車時,需兩崗協調作業,在此情況下職能差異和專業技能的不對稱將顯著降低協調作業的效率;在崗位融合后,車輛運維工可單崗覆蓋列車運檢的全工作流程,既可保證車輛運維工生產工作的飽和度,又能提高作業效率。
(3)安全保障。車輛運維工在熟練掌握行車流程和列車駕駛技能的同時,還熟悉車輛性能,掌握車輛維護技術,復合的技術儲備可保證運維工在突發情況下具有獨立解決問題的能力,如降級模式下的手動駕駛列車、線路突發情況下的應急處置,以及值乘列車上的乘客救護等。車輛運維工依靠技術融合優勢和安全理念,在故障處置方面較既有線的優勢更大。
(4)融合程度。深圳地鐵20號線運營初期采用崗位融合的運營模式,相應崗位的人員經過前期培訓與實際工作磨合,基本達到預期的崗位工作標準。原25名司機劃轉車輛運維工后均可完成日常列車外觀及車輛功能的巡檢作業,具體包括列車巡視(客室外觀巡查)、列車回廠后的車下檢查、制動自檢等內容,實行作業質量“結果控”,確保檢修作業的高質量。原車輛檢修專業人員劃轉車輛運維工22人,其中14人(63.6%)可達到庫內轉軌、列車連掛、試車線低速調車等作業要求。經后期再次評估鑒定,目前車輛運維工已同時掌握列車駕駛與車輛維修技能,其日常工作均可實現單人單崗作業。
深圳地鐵20號線的實踐驗證表明,司機與檢修工崗位融合雖仍存在待解決的問題,但總體符合線路運營的基本目標,有待進一步解決的是崗位融合后的崗位不對等問題,即司機與維修工崗位不對等。在融合過程中需突破跨崗技術壁壘,原司機崗為客服類型,對操作技術熟練度要求高;原檢修崗為技工類型,對專業技術要求高,后續還需進一步有針對性地優化崗位融合方案。20號線的崗位融合方案是對未來業務融合與人員分流做出的有力嘗試,可以預見未來運營模式提升至GoA4等級后,車輛運維工崗位可實現車輛專業崗內部的動態平衡分流,達成GoA3等級平穩過渡至GoA4等級的預期設想。綜上所述,20號線的運營實踐證實車輛運維工的崗位融合模式具備可行性。
3 結語
為有效發揮全自動運行系統的優勢,地鐵運營相關部門應盡早啟動崗位分流規劃和人員技能擴展培訓等方面的研究,將管理模式改革與列車自動運行設備升級同步進行,保證地鐵運營模式的平穩順利轉型。深圳地鐵新線路自動化等級由GoA3升級為GoA4的過程,深刻影響地鐵司機的職能范圍與工作飽和度,司機崗位的率先改革為其他崗位指明了一條強技能、多職能、跨專業的優化調整路線。20號線的崗位融合嘗試為深圳地鐵四期建設規劃線路的全自動運行模式改革提供了實踐參考,可指導后續線路提前謀劃崗位優化調整、開展技能培訓,盡早實現GoA4等級的全自動運行。
參考文獻
[1]寧濱,郜春海,李開成,等.中國城市軌道交通全自動運行系統技術及應用[J].北京交通大學學報, 2019(1):1-6.
[2]郜春海,王偉,李凱,等.全自動運行系統發展趨勢及建議[J].都市快軌交通, 2018(1):51-57.
[3]中國城市軌道交通協會.中國城市軌道交通全自動運行系統技術指南(試行)[Z].北京, 2019.
[4]陸鵬.城市軌道交通全自動運行系統崗位設置的優化[J].城市軌道交通研究, 2019(S2):46-48+53.
[5]馬偉杰,王偉雯.上海軌道交通10號線全自動運營實踐及啟示[J].城市軌道交通研究, 2019(S2):1-5.
[6]銀益輝,雷成健,劉澤.ATO設備故障時列車全自動運行技術方案研究[J]. 控制與信息技術, 2021(6):30-34.
[7]譚文舉.軌道交通全自動運行條件下運營場景設計及智能運維研究[D].北京:北京交通大學, 2020.
[8]鄭磊,藍亮文.跨坐式單軌無人干預列車運行(GOA4)級全自動運行系統安全風險管控研究[J].城市軌道交通研究, 2023(2):81-85.
[9]陳敏瑋,黃智毅.全自動運行列車值守模式研究[J].現代城市軌道交通, 2022(S2): 64-67.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34