接觸網隧道自動定位測量儀的研究設計
2024-02-20 05:46:40張少軒
鐵道運營技術 2024年1期
羅 慶,張少軒
(1.中鐵電氣化局集團有限公司,工程師,四川 成都 610000;2.四川鐵道職業學院,工程師,四川 成都 610000)
鐵路隧道內施工主要包括測量、打孔、預埋螺栓及安裝等工作,而接觸網隧道測量工作是所有后續工序的基礎。傳統測量儀器主要包括全站儀,水準儀,鋼卷尺等配合測量,各儀器的精準度與相互間配合精度容易產生誤差;數據傳輸的通道穩定性較差,暫無有線和無線結合的通信方式;軟件系統的開發和人機界面設置缺失;機械機構的穩定性和便攜性能有待提高。
為解決以上問題,設計出接觸網隧道自動測量儀,可提升測量穩定性,測量精度高,不存在多種測量儀器的相互間配合,整體的機械結構較為穩定,且方便攜帶。
1 接觸網隧道自動測量儀設計
1.1 總體設計
接觸網隧道自動定位測量儀主要包括如下功能模塊,分別是電源控制模塊、通信模塊、中央處理器模塊、電機控制模塊。系統結構框圖如圖1所示。
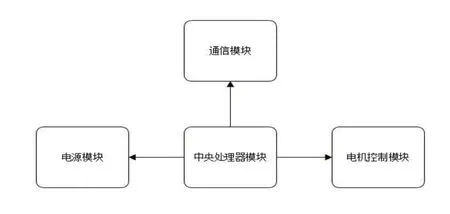
圖1 系統框圖
1.1.1 電源模塊 設計電源采用DC12V 進行充電,內嵌鋰電池,充電電流設計為1A~2A,電池容量為:4×3600mA,具備電源切換功能及放電保護功能。
1.1.2 通信模塊 整個控制板采用無線網(WIFI)與手機進行通信,采用一體化WIFI模組加輔助保護電路作為移動端與主機的通信接口,采用貼片天線,內置于機體內。通信模塊連接圖如圖2所示。
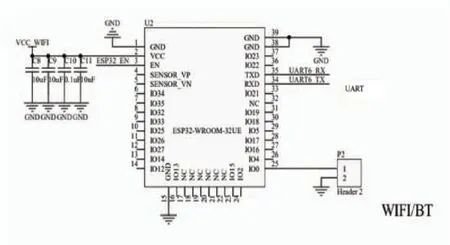
圖2 通信模塊
WIFI 發送接收控制電路通過芯片BQ25606 與微控制單元(MCU)進行協同管理,由MCU 中的嵌入式程序來處理各種接收或發送的指令,嵌入式程序設計包括看門狗程序,針對程序死機、連接不上等問題會自動處理并重連。
1.1.3 中央處理器模塊主控芯片型號為STM32F40 5RG,該處理器是最新一代用于嵌入式系統的微處理器(ARM),以滿足MCU 實現的需求,同時減少引腳數量和降低功耗,并提供卓越的計算性能和對中斷的高效響應。該處理器具有良好的編碼效率,提供了在內存大小為8 位和16 位處理器中的ARM 內核所期望的高性能。該處理器支持一套數字信號處理(DSP)指令,可實現高效的信號處理和復雜算法執行。中央處理器模塊引腳使用情況如圖3所示。
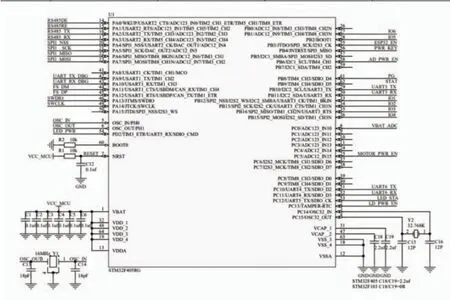
圖3 中央處理器模塊
1.1.4 電機控制模塊 電機控制部分,選用的是高精度步進電機,通過控制保護電路來對電機的旋轉角度進行控制管理,可以實現快速轉動和慢速轉動等。電機控制模塊原理圖如圖4所示。
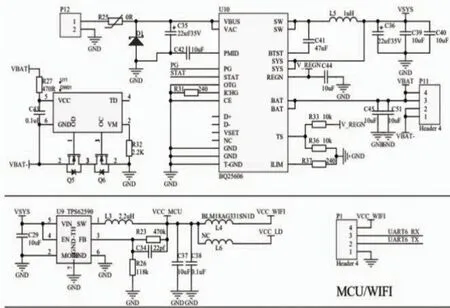
圖4 電機控制模塊
1.2 外部機械設計
1.2.1 支架 由于現場使用環境比較復雜,因此機殼設計過程中要充分考慮現場環境因素及地面不平等問題,設計時首選采用三角支架的方式,三角支架采用通用的儀器支架與現有鐵路上的一些測量儀器,三角支架俯視圖與三角支架總體示意圖如圖5、圖6所示。

圖5 三角支架俯視圖

圖6 總體示意圖
1.2.2 底座調平 考慮到現場高低不平坦的地面,測試人員需要對設備的垂直度進行調整,設計在支架上方安裝一個調整裝置,工作人員通過選擇轉軸即可進行設備調平處理。底座調平裝置如圖7所示。

圖7 底座調平
1.2.3 主機機體設計 主機整體設計采用U型設計,一側為主機控制電路板,另一側設計為減速步進電機,底部連接底座,中間位置為中空,設計高精度激光測距探頭,可以進行360 度自由旋轉,同時為方便攜帶,還設計有提手。主機機體設計如圖8所示。
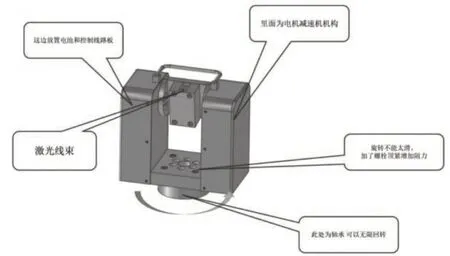
圖8 主機機體設計
1.2.4 整機結構 整機結構示意圖如圖9所示。
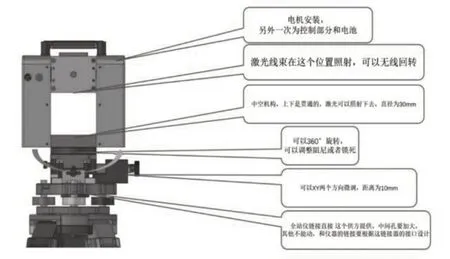
圖9 整機機構示意圖
2 方案實施
成都至川主寺(黃勝關)段位于四川省境內,起于成都鐵路局青白江站,經茂縣到川主寺(黃勝關),正線全長275.8km,全線新設車站12 個,本段線路含隧道17座共175.524km,占正線長度63.64%;隧道吊柱9428 根。隧道內測量壓力較大,本測量儀可以根據預先輸入的吊柱中心的限界值的理論參數,自動指示出隧道內吊柱的安裝位置;根據預先輸入的相應吊柱安裝板固定孔與吊柱中心距離的理論參數,自動測量出固定孔對應的隧道壁高度,并計算出吊柱安裝底板與水平面的夾角。具體操作步驟:(1)儀器擺放及調平設置:將儀器放置在標記的參考點位置,打開設備電源,等待完成儀器初始化設置。此時激光頭處于垂直向下,將激光頭射出的紅點對準參考點,通過調平支架對儀器進行調平。測出一個遠離基準點的參考點G 點,保證該點與參考點在同一條直線,并與激光頭垂直。(2)將手機App 通過WIFI與設備進行連接。(3)打開激光探頭。點擊查找G點按鈕,激光自動掃描。調整儀器,使激光光柵與G點重合,當G點找到后,按“設為零點”按鈕則停止G點查找,激光回到原點位置。輸入支柱號、距離數值,開始測量,激光自動進行相關找點動作。當完成找點工作后,“輸出數據欄”輸出測量數據。點擊“保存”按鈕,測量數據存入列表中,設備進行回原點動作,待激光回到原點后即可進行下一次測量工作。
可以通過手機App 的測距記錄查看測量結果。具體的操作流程如圖10所示:
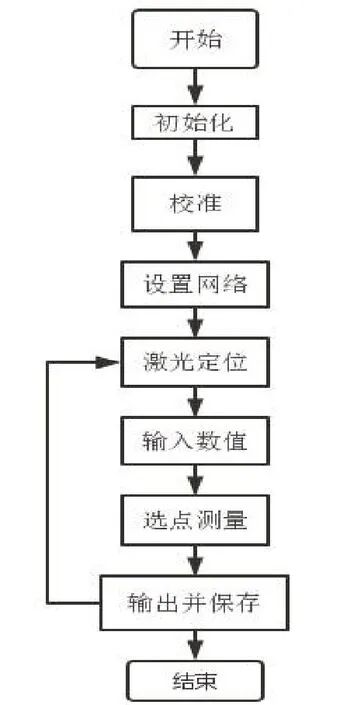
圖10 操作流程圖
隧道內吊柱施工一般在站前單位隧道貫通測量調線后至道床施工前最佳,為避免隧道內道床施工后材料運輸困難,要求測量定位精準,從而計算出吊柱長度。隧道內數據采集示意圖如圖11所示。
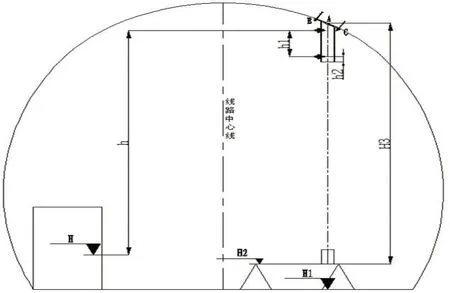
圖11 隧道內數據采集
圖11 中,上底座高度h、底座間距h1、吊柱底部外露長度h2為設計已知量。
現場測得數據為:通過引樁測得紅線標的標高H、激光測量儀標高H2、激光測量儀測得吊柱中心位置高度H3。
傳統測量計算方法:
先計算出吊柱底部距軌面高度:
h-h1-h2=6.925-0.725-0.2=6m。
再換算出吊柱中心處對軌面的凈空高度:
H-H2+H3=0.869-0.746+7.061=7.184m。
用以上數據計算出吊柱長度:
7.184-6=1.184m。
接觸網隧道自動測量儀測量計算方法:
已知:h=6.925mm、h1=0.725m、h2=0.2m、H=2008.4405m。
近年來,雖然高等教育投入在逐年增長,但有些高校仍舊持續面臨辦學經費緊缺的窘境,諸多教學問題難以得到顯著優化,其中實踐教學問題尤為突出。部分高校雖然開始逐步優化實踐教學,嘗試應用“理實一體化”教學模式,但是應用經驗不足,難以在短時間內顯著提升實踐教學質量[1]。因此,基于多元智能理論探究高校實踐教學困境與出路,是加快優化高校實踐教學、提升綜合型人才培養質量的重要選擇。
通過接觸網隧道自動測量儀一次測量得出高程:
H2=2008.5638m、H3=7.061m。
先換算吊柱底座中心處隧道二襯高程:
地面高程+ 測得數據=2008.5638+7.061=2015.6248。
再用換算高程依次減去各設計高度的換算高程:
2015.6248-(H+h-h1-h2)=1.184m。
通過兩種計算方式對比,采用接觸網隧道自動測量儀可直接使用設計高程,消除了多臺儀器造成的測量誤差。
傳統測量方式與隧道自動測量儀通過在不同支柱處進行測量比較,結果對比如圖12 所示,實線為傳統測量方式,虛線為隧道自動測量儀,兩種方式測量結果基本一致,僅在個別支柱處存在誤差,證明接觸網隧道自動測量儀可代替傳統的測量方式。
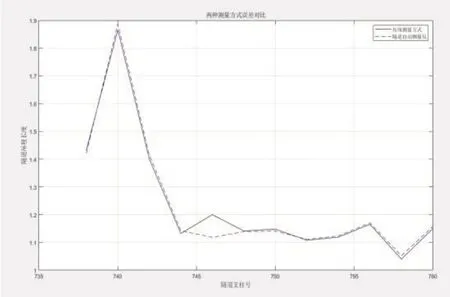
圖12 測量結果對比
3 結束語
接觸網隧道自動測量儀使得操作簡化,滿足操作人員可一人完成測量工作,減少數據反復記錄帶來的誤差,利用激光進行距離、角度的測量,減少人工。在產品性能方面,實現了自動計算功能,系統可根據激光檢測的數據,儀器內置程序準確判斷儀器本身的水平面與測量點之間的高度及橫向位置的偏差,以滿足現場對吊柱限界的控制及計算吊柱長度計算所用數據的采集。同時可以進行數據的輸入輸出,可以將已知數據輸入,激光采集數據,自動計算結果。此外添加了無線傳輸功能,通過無線傳輸功能達到手機與儀器的連接,使用手機進入儀器的數據輸入頁面,便于數據的輸入輸出,免去儀器調整好后受按鍵的外力影響而失去水平度。
在經濟效益方面,使用此測量儀器簡化了測量步驟,提高了測量效率及測量精準度,大幅度縮減了人工成本。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21