地鐵車輛牽引系統頻繁預充電問題優化
2024-02-20 05:46:42曹斌,張拓
鐵道運營技術 2024年1期
曹 斌,張 拓
(上海阿爾斯通交通電氣有限公司,工程師,陜西 西安 710000)
牽引系統預充電流程的設計,主要作用是有效避免大電壓直接在上電一瞬間加在主驅逆變器上,造成逆變器損壞,提高主回路安全性[1];但頻繁預充電會造成預充電電路中的預充電電阻由于溫度過高而損壞,造成運營車輛出現牽引系統故障,存在救援風險[2],降低車輛的安全可靠性。
1 牽引系統預充電電路原理介紹
根據上海阿爾斯通交通電氣有限公司(簡稱阿爾斯通)牽引系統保護設計要求,主回路中的主接觸(K-IC)閉合前有一個預充電過程,作用是為了限流保護后端設備,預充電電路包括預充電接觸器(KCCC)和預充電電阻(R-CCZ)(如圖1所示)。
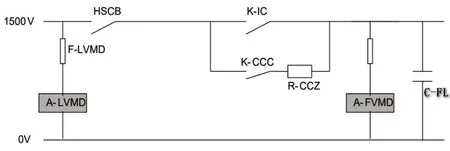
圖1 預充電流程原理圖
預充電電路動作流程:(1)K-CCC閉合;(2)支撐電容(C-FL)充電電壓被)濾波電壓傳感器(A-FVMD)檢測到電壓大于900V 后KIC 閉合,而后KCCC 持續保持100 毫秒后斷開,預充電流程結束。KIC 正常斷開條件:(1)非蘑菇按鈕的緊急制動;(2)HSCB 斷開。當HSCB 斷開后KIC 也會主動斷開主回路,其中HSCB斷開條件為蘑菇按鈕緊急制動。
2 預充電問題造成的車輛狀況分析
2.1 車輛狀況
2020 年10 月22 日西安地鐵5 號線0543 車正線試運營時出現全車無牽引狀況,司機現場進行牽引系統復位以及相應處理,處理無效后經行調協調,將其利用后車進行救援回庫至西江渡停車場,此次救援造成正線車輛班次混亂以及車輛延遲。
0543車輛故障救援回庫后,下載車輛TCMS 系統的ERM(數據記錄儀)及牽引系統相關數據,且查看DDU(顯示屏幕)顯示狀況,如圖2所示。
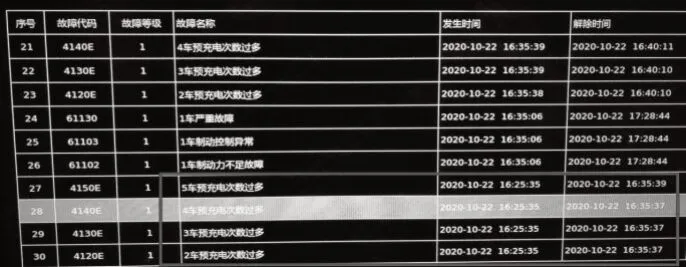
圖2 DDU故障信息
2.2 圖形數據分析
圖2 中DDU 顯示2、3、4、5 車全部為預充電次數過多故障,造成救援。查看ERM 數據,對于圖形進行了相應細化分析,如表1所示。
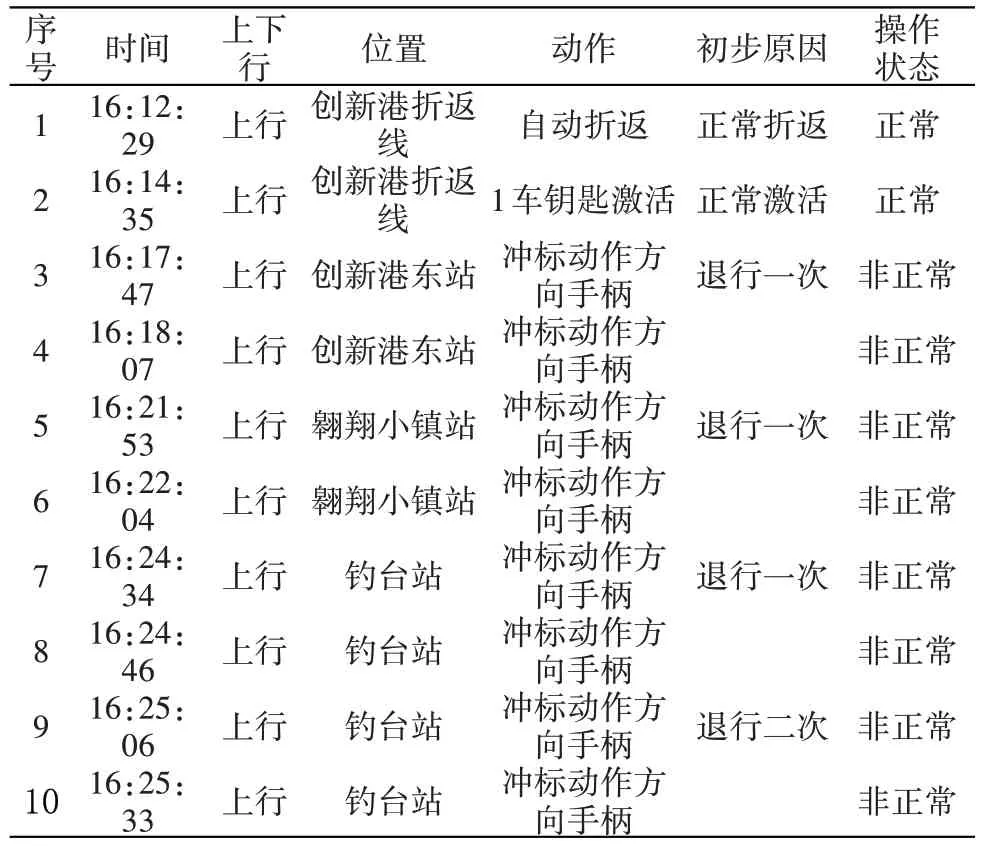
表1 ERM數據分析明細
表1 可以看出,司機13 分鐘內造成了10 次牽引系統預充電,其中一次自動正常折返,一次正常司機換端,其余8 次均由于車輛司機手動開車造成車輛沖標,司機通過頻繁方向手柄切換進行倒車至站臺,由于方向的切換使車輛施加緊急制動,因而導致牽引系統的主接觸器KIC 斷開,當方向指令二次恢復后,牽引系統會有一個預充電流程,因此,造成了高達8次的預充電故障,牽引鎖閉,車輛救援。
3 預充電頻繁問題分析優化及驗證
3.1 問題分析
3.1.1 牽引系統預充電次數過多故障原因分析 預充電次數過多故障報出機制為:(1)當主接觸器KIC斷開或者高速斷路器HSCB 斷開時,牽引系統會記錄一次,然后當二次條件滿足后自動再進行預充電過程(各條件詳見預充電電路動作原理介紹),若15分鐘內預充電次數超過10次,第10次會造成牽引逆變器鎖閉不工作;(2)牽引系統鎖閉后,要滿足15 分鐘間隔時間,進行電阻散熱,自動解鎖恢復;(3)系統鎖閉期間不能通過任何方式進行解鎖復位。
以上預充電次數過多故障回路斷開及報出故障機制是根據:(1)鐵路國際標準EN50126-2 中關于牽引系統安全要求,阿爾斯通針對列車運營過程中車輛施加緊急制動對于牽引系統存在相關風險進行了評估有害風險分析(PHA),PHA 中定義了主回路斷開措施要求:緊急制動過程中必須斷開HSCB 或主接觸器K-IC;通過設計聯絡和客戶商定以及國內專家評估,為了確保車輛的運營安全可靠性,牽引系統接收到非蘑菇按鈕的緊急指令時僅斷開KIC 即可,若條件恢復二次滿足則可進行重新預充電動作流程;(2)阿爾斯通公司根據預充電電阻溫升實驗數據發現,牽引系統在預充電過程中由于會使R-CCZ(預充電電阻)溫度升高,若頻繁預充電則會出現電阻炸裂損壞的狀況發生[3],因此,對于存在此問題的不良后果評估進行了相應的軟件保護設計。
3.1.2 車輛控制電路原理分析 通過表1 分析已知曉問題原因,通過對整車原理圖分析查看,車輛在最初設計時(如圖3 所示),車輛緊急制動控制環路中當從前進方向F或者后退方向R位置過0位置或到0位置,常閉點會變成常開點,車輛會施加緊急制動,因而由于方向的切換會引起車輛施加緊急制動,具體現場司控器方向手柄數據采集(如表2所示)。
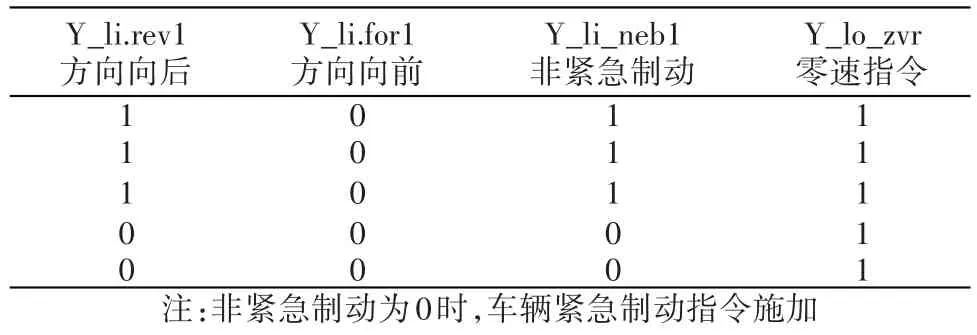
表2 指令數據采集表
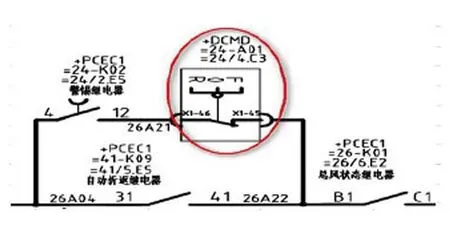
圖3 緊急制動環路圖
3.2 優化方案
3.2.1 牽引系統軟件優化改進方案及效果驗證
考慮到車輛運營的情況,進行相應的合理優化改進,進行相應的優化及測試驗證,具體如下:
(1)將原本的15分鐘10次預充電鎖閉優化修改為10鐘10次預充電鎖閉保護,放寬預充電次數時間。
(2)將原鎖閉后的15分鐘間隔時間修改為10分鐘,減少等待時間。
(3)增加提醒功能,第6 次預充電時,DDU 會顯示對話框提醒司機。
(4)增加解鎖功能,若10 次預充電鎖閉后,手動切換至后備模式直接解鎖,避免救援風險。
以上次數及時間的確定根據電阻溫升模擬實驗模擬數據確定,具體如圖4所示。
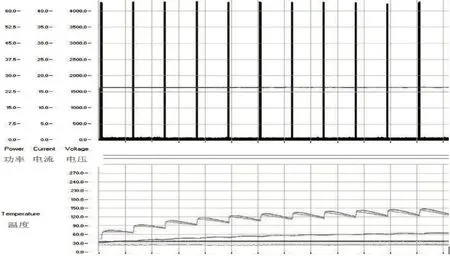
圖4 電阻溫度次數測試圖
溫升測試結論:此次溫升測試是在10 分鐘內連續動作了11 次,每次溫度都在升高,但在第11 次時溫度剛好超出150℃(電阻溫升耐受值),因而軟件優化為10分鐘10次。
軟件變更后上車測試效果驗證,如圖5 所示。軟件上車現場測試結論和變更后功能一致。
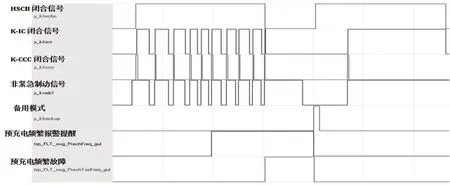
圖5 現場軟件測試圖
3.2.2 車輛原理設計變更優化方案及效果驗證 通過車輛原理設計分析出,方向過零位置會造成緊急制動,緊急制動會造成主接觸器KIC 斷開而后當預充電次數到達設計次數后,故障就會出現。因此針對緊急制動環路進行優化,分析后給環路中增加零速繼電器常開點與方向手柄常閉點并聯(如圖6 所示),增加后車輛緊急制動環路中,車輛位于靜止狀態下,零速繼電器常開點閉合,旁路方向手柄觸點,當方向手柄從F(向前)或R(向后)位置切換方向過0位置或到0位置,車輛也不會施加緊急制動;而當車輛行駛中零速繼電器失電后,動作方向手柄過0 位置會觸發緊急制動指令(行車安全考慮),具體變更后現場效果驗證數據采集如表3所示。
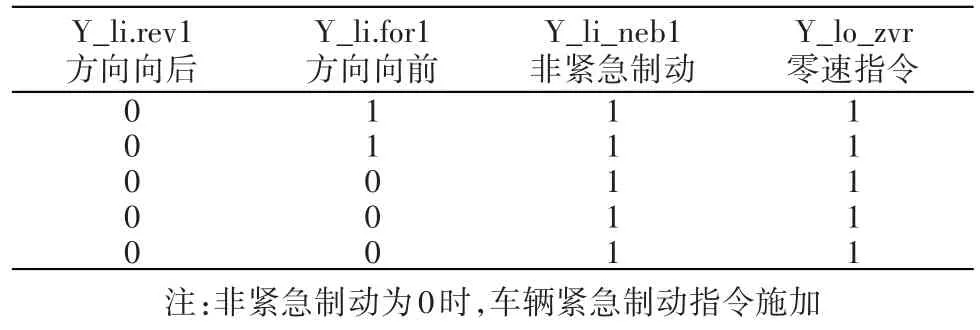
表3 修改后指令動作表
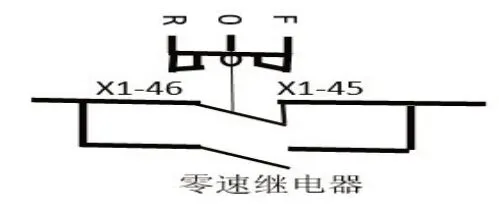
圖6 車輛變更原理圖
4 結論
通過對牽引系統預充電頻繁問題的深入分析,找出了車輛救援的主要原因,針對現有牽引系統軟件和整車原理電路設計提出了升級優化方案,通過對方案修改的模擬實驗及現場驗證,結果良好,一方面,不僅可以規避人為因素造成問題的二次發生,同時即便再次出現頻繁故障造成牽引系統鎖閉,也可通過后備模式解鎖,規避掉救援的風險,提高了車輛運營安全的可靠性;另一方面,減少主接觸器的工作次數,可延長其工作壽命。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
計算機應用(2022年2期)2022-03-01 12:33:42
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
計算機應用(2021年4期)2021-04-20 14:06:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58