基于貝葉斯算法的網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別模型
2024-02-21 06:48:38張亮
湖北科技學(xué)院學(xué)報(bào) 2024年1期
張 亮
(安徽中醫(yī)藥大學(xué) 體育部,安徽 合肥 230012)
網(wǎng)球運(yùn)動(dòng)起源于12世紀(jì)中葉的法國(guó),在19世紀(jì)末傳入我國(guó)。近年來,網(wǎng)球運(yùn)動(dòng)得到了快速的發(fā)展,在世界范圍內(nèi)風(fēng)靡,成為世界級(jí)項(xiàng)目。網(wǎng)球運(yùn)動(dòng)經(jīng)過多年的發(fā)展,發(fā)生了很大的變化,其擊打方式演進(jìn)過程為:手擊打→板擊打→拍擊打,球拍材質(zhì)演進(jìn)過程為:木料材質(zhì)→高科技碳纖維材料[1]。除此之外,網(wǎng)球運(yùn)動(dòng)的打法與競(jìng)技戰(zhàn)術(shù)也產(chǎn)生了極大的演進(jìn)。發(fā)球是網(wǎng)球運(yùn)動(dòng)中最關(guān)鍵動(dòng)作之一,標(biāo)志著選手對(duì)抗的開始。發(fā)球動(dòng)作特征主要表現(xiàn)在兩方面,一方面是發(fā)球由一方掌控,不受對(duì)手的限制;另一方面發(fā)球速度、角度、旋轉(zhuǎn)以及落點(diǎn)均是決定是否得分的關(guān)鍵因素,成為贏得勝利的基礎(chǔ)。在網(wǎng)球比賽過程中,每一分的產(chǎn)生都必須經(jīng)過發(fā)球動(dòng)作,由于發(fā)球具有一定的主動(dòng)權(quán),故選手更容易在發(fā)球局得分取勝[2]。
由于網(wǎng)球運(yùn)動(dòng)的不斷發(fā)展,其對(duì)發(fā)球訓(xùn)練的科學(xué)性與實(shí)效性提出了更高的要求,發(fā)球是網(wǎng)球比賽中得分的起點(diǎn),要想贏得比賽,主要通過發(fā)球局取勝,由此可見,發(fā)球動(dòng)作的重要性。因此相關(guān)學(xué)者對(duì)網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別做出了研究。文獻(xiàn)[3]提出基于“Go/NoGo”任務(wù)范式的乒乓球發(fā)球動(dòng)作識(shí)別模型,通過3D模擬擊球部位的信息結(jié)構(gòu),識(shí)別正確動(dòng)作并按鍵做出反應(yīng),識(shí)別錯(cuò)誤動(dòng)作不按鍵。該方法的識(shí)別正確率較高,但識(shí)別耗時(shí)較長(zhǎng);文獻(xiàn)[4]提出基于三維圖像分析的網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別模型,從運(yùn)動(dòng)生物力學(xué)角度分析發(fā)球動(dòng)作參數(shù),分析每次發(fā)球動(dòng)作的異同,構(gòu)建識(shí)別模型。該方法的識(shí)別耗時(shí)較短,但識(shí)別正確率較差。
針對(duì)上述問題,構(gòu)建基于貝葉斯算法的網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別模型。貝葉斯算法是一種統(tǒng)計(jì)學(xué)方法,具備算法簡(jiǎn)單、分類準(zhǔn)確率高、速度快等優(yōu)勢(shì)。鍛煉網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作,構(gòu)建網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別模型,通過模型識(shí)別發(fā)球動(dòng)作的相關(guān)運(yùn)動(dòng)學(xué)參數(shù)。通過構(gòu)建模型為網(wǎng)球運(yùn)動(dòng)發(fā)球科學(xué)訓(xùn)練以及日常教學(xué)提供一定的理論依據(jù)。
一、網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別模型構(gòu)建
1.發(fā)球動(dòng)作結(jié)構(gòu)及特征分析
為了精確的識(shí)別網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作,首先需要分析發(fā)球動(dòng)作的結(jié)構(gòu)與特征,具體發(fā)球動(dòng)作分析過程如下所示。
依據(jù)動(dòng)作結(jié)構(gòu)原理可知,任何技術(shù)動(dòng)作均是由一系列不同的簡(jiǎn)單動(dòng)作組合而成。為了方便發(fā)球動(dòng)作的解釋,將身體看作一個(gè)動(dòng)力鏈。發(fā)球動(dòng)作動(dòng)力鏈即開始于腳的反作用力,結(jié)束于快速揮拍擊球的動(dòng)作過程。
依據(jù)動(dòng)力鏈原理,將發(fā)球動(dòng)作劃分為六個(gè)階段,具體如表1所示。
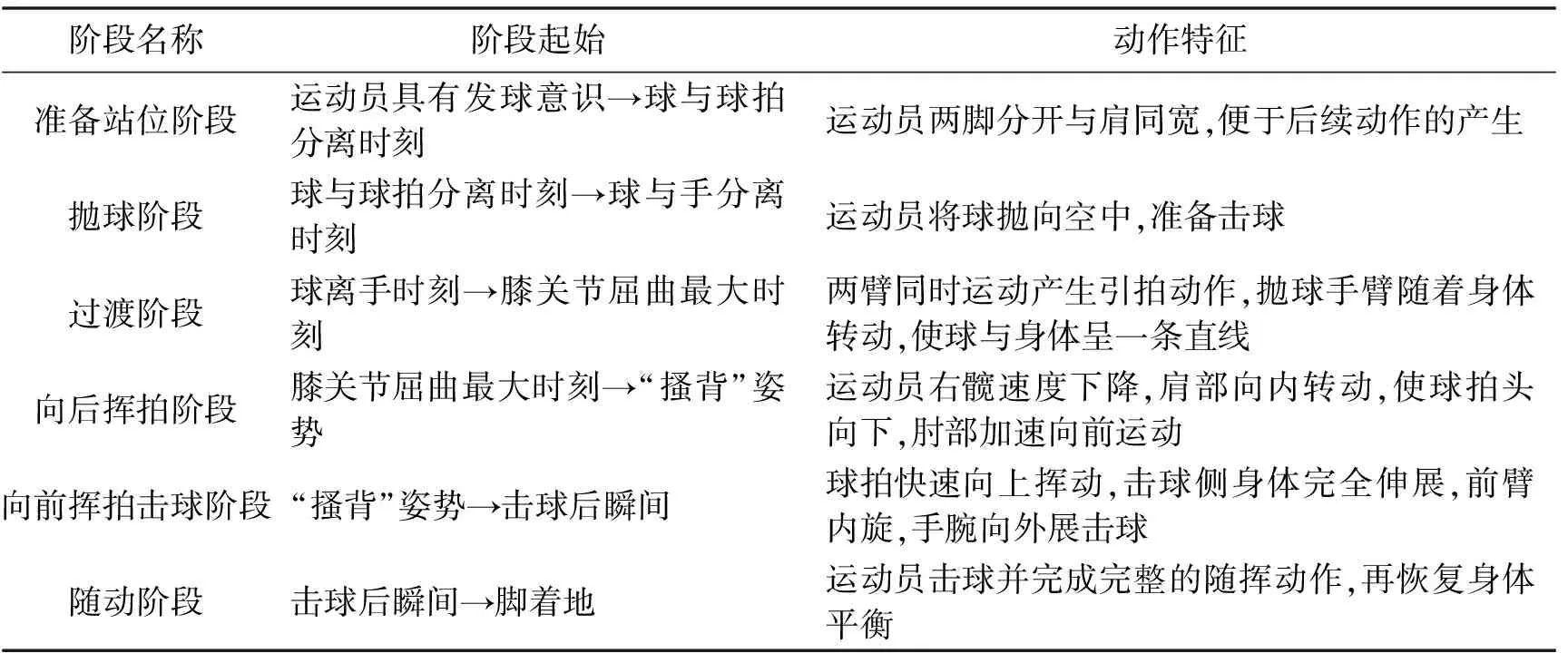
表1 發(fā)球動(dòng)作階段結(jié)構(gòu)表
網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作每個(gè)階段身體重心的變化速度存在著較大的不同,這也是發(fā)球動(dòng)作的關(guān)鍵特征之一[5]。經(jīng)過現(xiàn)有文獻(xiàn)可知,發(fā)球動(dòng)作不同階段身體重心線速度特征如表2所示。
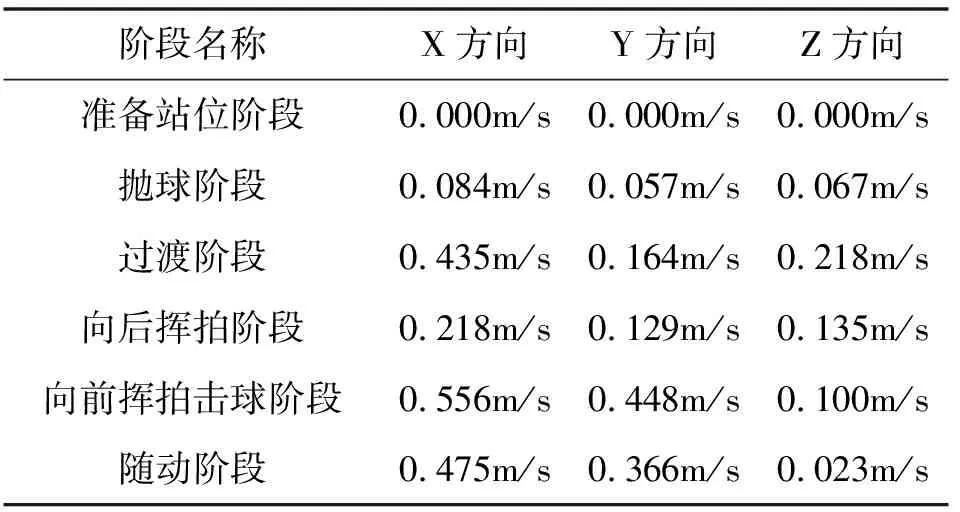
表2 發(fā)球動(dòng)作不同階段身體重心線速度特征表
上述過程完成了發(fā)球動(dòng)作結(jié)構(gòu)及特征的分析,為最終網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別做準(zhǔn)備。
2.發(fā)球動(dòng)作圖像獲取與處理
此研究選取包含CCD傳感器與CMOS傳感器的彩色攝像機(jī)采集網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作圖像。該攝像機(jī)可以同時(shí)獲取發(fā)球動(dòng)作的彩色圖像、深度圖像與骨骼圖像[6]。
其中,彩色圖像與深度圖像以數(shù)據(jù)流形式傳輸。彩色圖像分辨率為640*480,幀數(shù)為30Fps,格式為Bayer格式,彩色數(shù)據(jù)可以編碼為RGB-32bit。深度圖像獲取過程與彩色圖像一致,有效位置信息為高13位,用戶ID信息為低3位。骨骼圖像由深度圖像數(shù)據(jù)獲取,包含20個(gè)關(guān)節(jié)點(diǎn)的三維坐標(biāo),通過可視化顯示網(wǎng)球運(yùn)動(dòng)員的骨骼圖[7]。
為了方便發(fā)球動(dòng)作圖像的應(yīng)用,分析彩色圖像、深度圖像與骨骼圖像的空間坐標(biāo)關(guān)系[8]。彩色空間、深度空間與骨骼空間坐標(biāo)系如圖1所示。
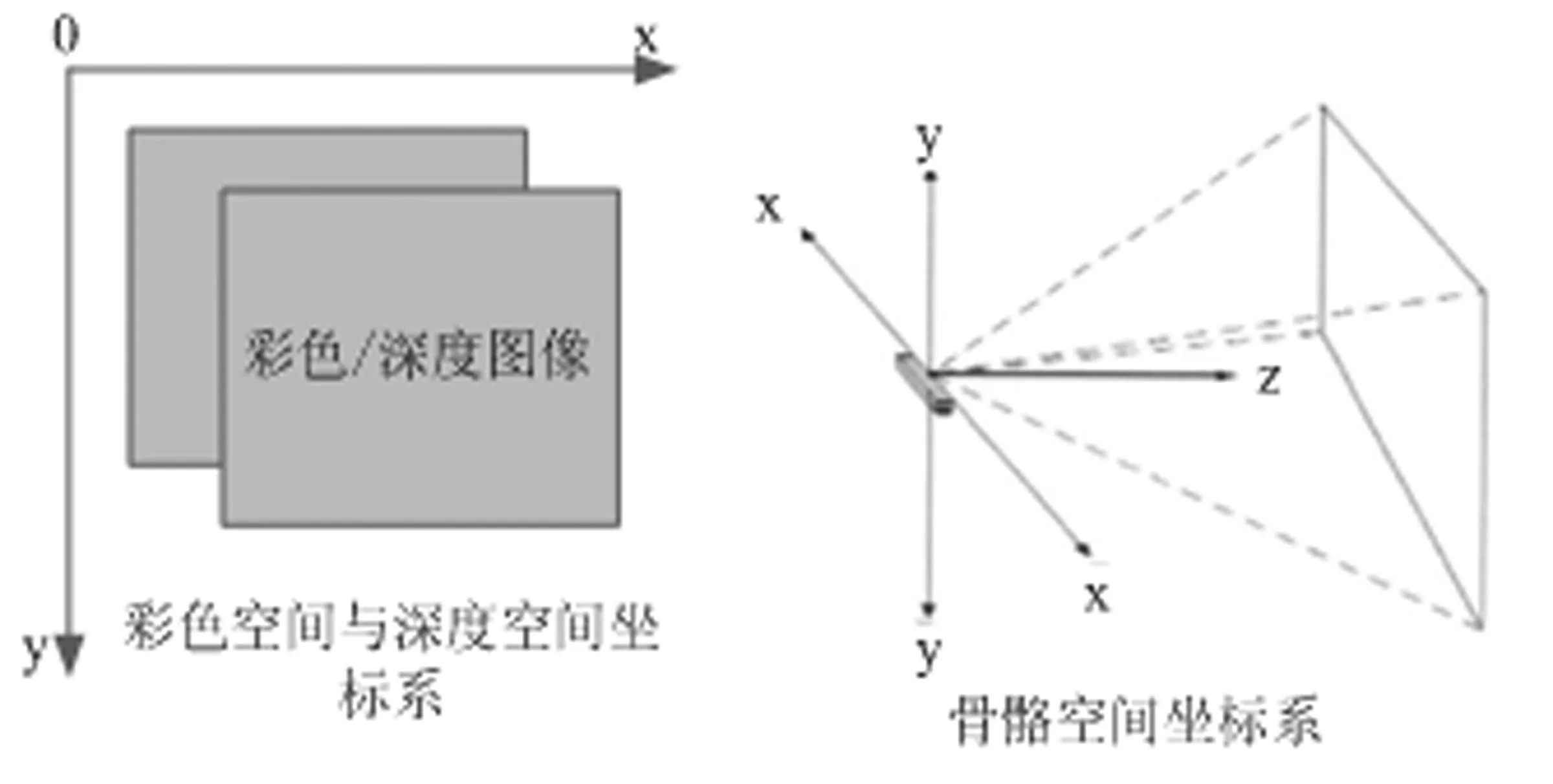
圖1 彩色空間、深度空間與骨骼空間坐標(biāo)系示意圖
設(shè)置彩色空間像素坐標(biāo)為(x(t),y(t),z(t)),深度空間像素坐標(biāo)為(xs(t),ys(t),zs(t)),骨骼空間像素坐標(biāo)為(xd(t),yd(t),zd(t))。
骨骼空間與深度空間坐標(biāo)系轉(zhuǎn)換公式為
(1)
式(1)中,a表示的是攝像機(jī)的水平方向視角,取值為57°;b表示的是攝像機(jī)的垂直方向視角,取值為43°。
深度空間與彩色空間坐標(biāo)系轉(zhuǎn)換公式為
(2)
式(2)中,△d表示的是攝像機(jī)的位移。
通過上述過程,將發(fā)球動(dòng)作彩色圖像、深度圖像與骨骼圖像變換到同一坐標(biāo)系中,由于z方向信息含量較少,為了方便圖像處理,忽略z方向信息,將得到的發(fā)球動(dòng)作圖像即為I(x,y),為下述發(fā)球動(dòng)作特征提取提供圖像數(shù)據(jù)[9]。
3.發(fā)球動(dòng)作特征提取
以上述獲得的發(fā)球動(dòng)作圖像I(x,y)為基礎(chǔ),采用FV算法提取發(fā)球動(dòng)作特征,為發(fā)球動(dòng)作識(shí)別提供依據(jù)。
對(duì)于發(fā)球動(dòng)作圖像來說,從中提取T個(gè)描述符(特征),每個(gè)描述符維度為D,則可以采用G={gt,t=1,2,…,T}來描述網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作特征[10]。假設(shè)T個(gè)描述符獨(dú)立同分布,則存在
(3)
式(3)中,p表示的是概率密度函數(shù);λ表示的是參數(shù)。
對(duì)公式(3)取對(duì)數(shù),得到
(4)
采用一組高斯分布的線性組合模型逼近公式(4)的分布,模型表示為
式(5)中,K表示的是模型中線性組合的個(gè)數(shù);wi表示的是自由變量;pi表示的是第i個(gè)高斯分布;ui表示的是描述符的參量。
通過公式(5)定義網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作特征,其概率表示為
(6)
由公式(6)可以看出,FV算法提取的發(fā)球動(dòng)作特征不但包含發(fā)球動(dòng)作的原始特征,還包含了一些結(jié)構(gòu)性信息,對(duì)發(fā)球動(dòng)作特征描述更加細(xì)致[11]。
4.貝葉斯分類器設(shè)計(jì)
貝葉斯分類器是網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別的關(guān)鍵,為此,依據(jù)貝葉斯算法設(shè)計(jì)分類器[12]。
貝葉斯分類器以條件獨(dú)立性假設(shè)為前提條件,依據(jù)貝葉斯算法設(shè)計(jì)的一種分類方法。對(duì)于訓(xùn)練樣本集,首先計(jì)算出訓(xùn)練集中輸入與輸出的聯(lián)合概率分布函數(shù),以此為基礎(chǔ),運(yùn)用貝葉斯算法計(jì)算輸入數(shù)據(jù)對(duì)應(yīng)的最大后驗(yàn)概率輸出[13]。

對(duì)于輸入值x,計(jì)算其先驗(yàn)概率與條件概率,計(jì)算公式如下
(7)
式(7)中,Y=ck表示的是輸入空間對(duì)應(yīng)的輸出空間;N表示的是訓(xùn)練數(shù)據(jù)集的數(shù)量;P(X(j)=ajl|Y=ck)表示的是聯(lián)合概率分布函數(shù)。
對(duì)于給定的輸入x,對(duì)應(yīng)的輸出空間表示為
(8)
依據(jù)公式(8)確定輸入x的類別,確定公式表示為
(9)
利用貝葉斯估計(jì)條件概率,估計(jì)結(jié)果為
(10)
式(10)中,Sj表示的是特征值的總數(shù)量。
以公式(10)為依據(jù),得到后驗(yàn)概率最大化的分類器,其表達(dá)式為
f(x)=arg maxP(Y=ck/X=x)
(11)
上述過程完成了貝葉斯分類器的設(shè)計(jì),為網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別提供堅(jiān)實(shí)的支撐[14]。
5.網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別
依據(jù)上述貝葉斯分類器的設(shè)計(jì),構(gòu)建網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別模型,構(gòu)建模型示意圖如圖2所示。
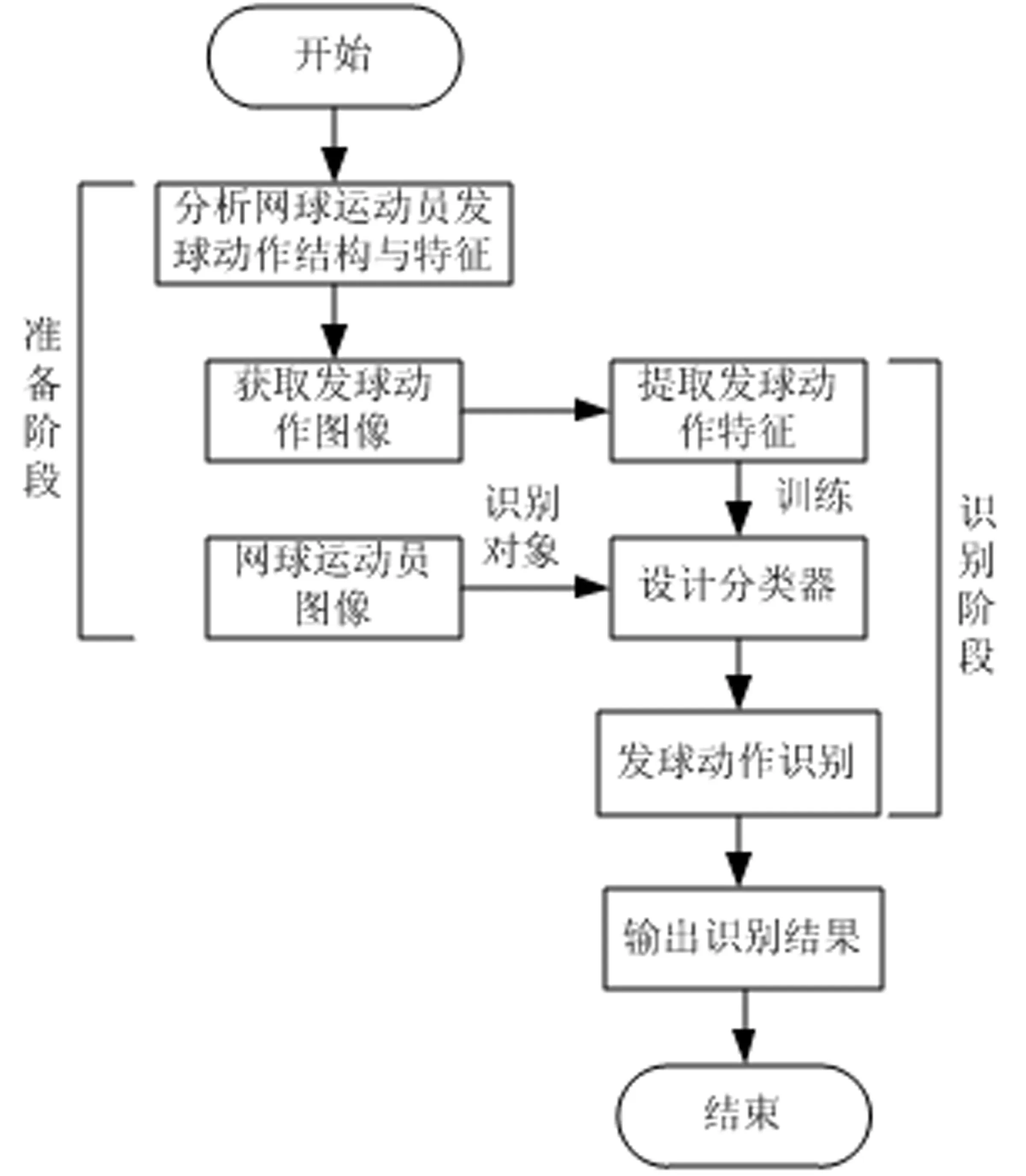
圖2 網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別模型示意圖
依據(jù)圖2模型即可實(shí)現(xiàn)網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作的識(shí)別。貝葉斯算法具備算法簡(jiǎn)單、分類準(zhǔn)確率高、速度快等優(yōu)勢(shì),由于貝葉斯算法的運(yùn)用,極大的提升了分類器的準(zhǔn)確率與速率,構(gòu)建模型可以既快速又準(zhǔn)確地識(shí)別網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作,為網(wǎng)球運(yùn)動(dòng)員訓(xùn)練以及發(fā)球技術(shù)的提升提供大量的數(shù)據(jù)支撐,同時(shí)也為網(wǎng)球運(yùn)動(dòng)的發(fā)展推波助瀾[15]。
二、仿真實(shí)驗(yàn)與結(jié)果分析
1.實(shí)驗(yàn)設(shè)備及對(duì)象
實(shí)驗(yàn)主要采用的設(shè)備為圖像獲取設(shè)備,將網(wǎng)球發(fā)球的短暫性與快速性,實(shí)驗(yàn)采用短時(shí)間采集存儲(chǔ)記錄系統(tǒng)實(shí)現(xiàn)實(shí)驗(yàn)圖像的獲取與存儲(chǔ),其由攝像機(jī)、采集卡、線纜、計(jì)算機(jī)以及采集軟件構(gòu)成,攝像機(jī)參數(shù)情況如表3所示。
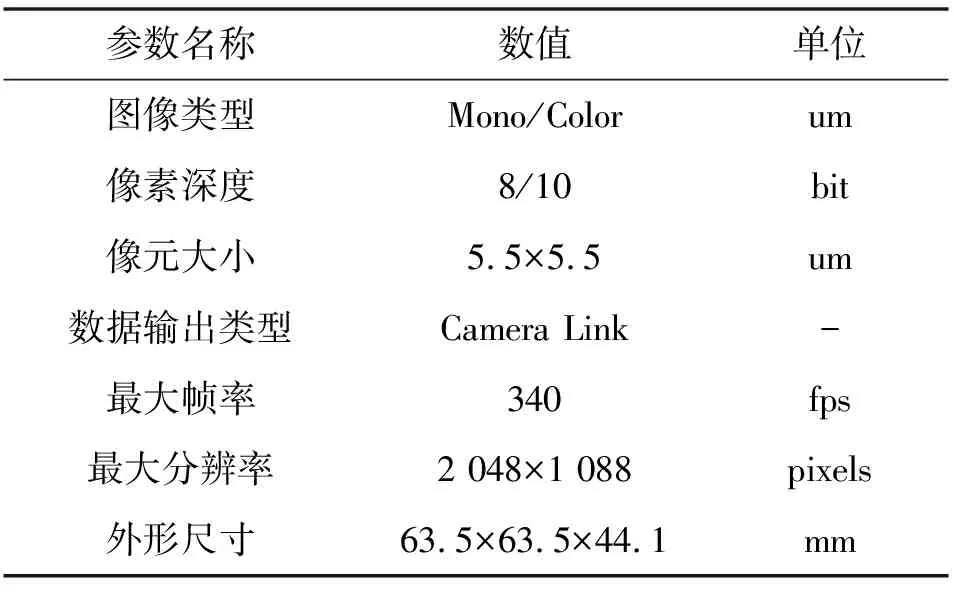
表3 攝像機(jī)參數(shù)表
選擇120名網(wǎng)球運(yùn)動(dòng)員作為實(shí)驗(yàn)對(duì)象,均以右手持拍、無傷病史、熟悉殺球技術(shù)和動(dòng)作要領(lǐng)、動(dòng)作流暢且舒展,且運(yùn)動(dòng)員等級(jí)水平均為5.5級(jí)別,能夠代表相同層次、相同水平等級(jí)的網(wǎng)球運(yùn)動(dòng)員發(fā)球技術(shù)特征。對(duì)遠(yuǎn)動(dòng)員的發(fā)球姿勢(shì)動(dòng)作取240組,采用所提方法、文獻(xiàn)[1]方法、文獻(xiàn)[2]方法對(duì)比運(yùn)動(dòng)員發(fā)球姿勢(shì)動(dòng)作的識(shí)別精度。實(shí)驗(yàn)對(duì)象人體特征如表4所示。
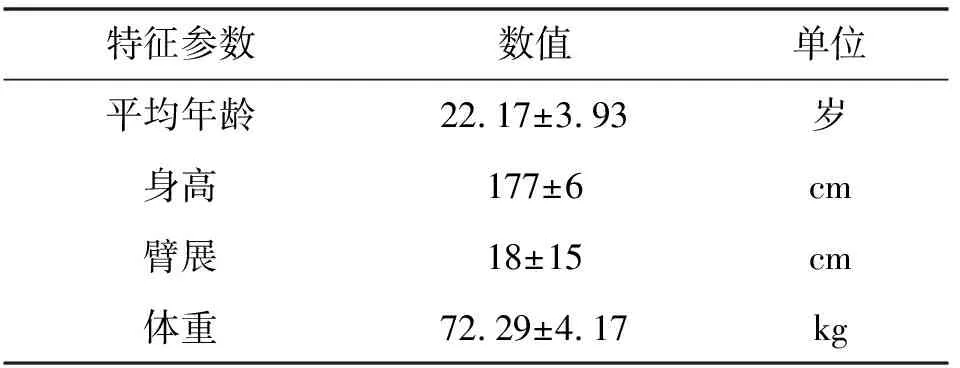
表4 實(shí)驗(yàn)對(duì)象人體特征表
2.實(shí)驗(yàn)數(shù)據(jù)采集
在仿真實(shí)驗(yàn)過程中,將攝像機(jī)放置于實(shí)驗(yàn)對(duì)象的右側(cè),具體擺放位置如圖3所示。
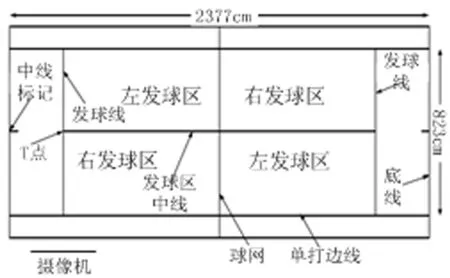
圖3 攝像機(jī)擺放位置示意圖
在實(shí)驗(yàn)過程中,標(biāo)記每個(gè)運(yùn)動(dòng)員的發(fā)球手臂關(guān)節(jié)點(diǎn),通過多次實(shí)驗(yàn)對(duì)比,設(shè)置標(biāo)記顏色為紅色,其對(duì)運(yùn)動(dòng)員發(fā)球無影響,具體如圖4所示。

圖4 發(fā)球手臂標(biāo)記點(diǎn)示意圖
采用攝像機(jī)獲取實(shí)驗(yàn)對(duì)象發(fā)球動(dòng)作圖像,同時(shí)對(duì)其進(jìn)行去噪、腐蝕與膨脹操作,為實(shí)驗(yàn)結(jié)果分析提供可靠的數(shù)據(jù)支撐。
3.實(shí)驗(yàn)結(jié)果分析
為了反映構(gòu)建模型的性能,選取發(fā)球動(dòng)作識(shí)別準(zhǔn)確率系數(shù)及識(shí)別耗時(shí)指標(biāo),常規(guī)情況下,發(fā)球動(dòng)作識(shí)別準(zhǔn)確率系數(shù)越大,表明發(fā)球動(dòng)作識(shí)別準(zhǔn)確率越高,識(shí)別耗時(shí)越短,發(fā)球動(dòng)作的識(shí)別速度越快,構(gòu)建模型的識(shí)別性能越佳。以文獻(xiàn)[3]方法及文獻(xiàn)[4]方法作為對(duì)比實(shí)驗(yàn)方法,通過上節(jié)得到實(shí)驗(yàn)數(shù)據(jù)統(tǒng)計(jì)結(jié)果如圖5所示。
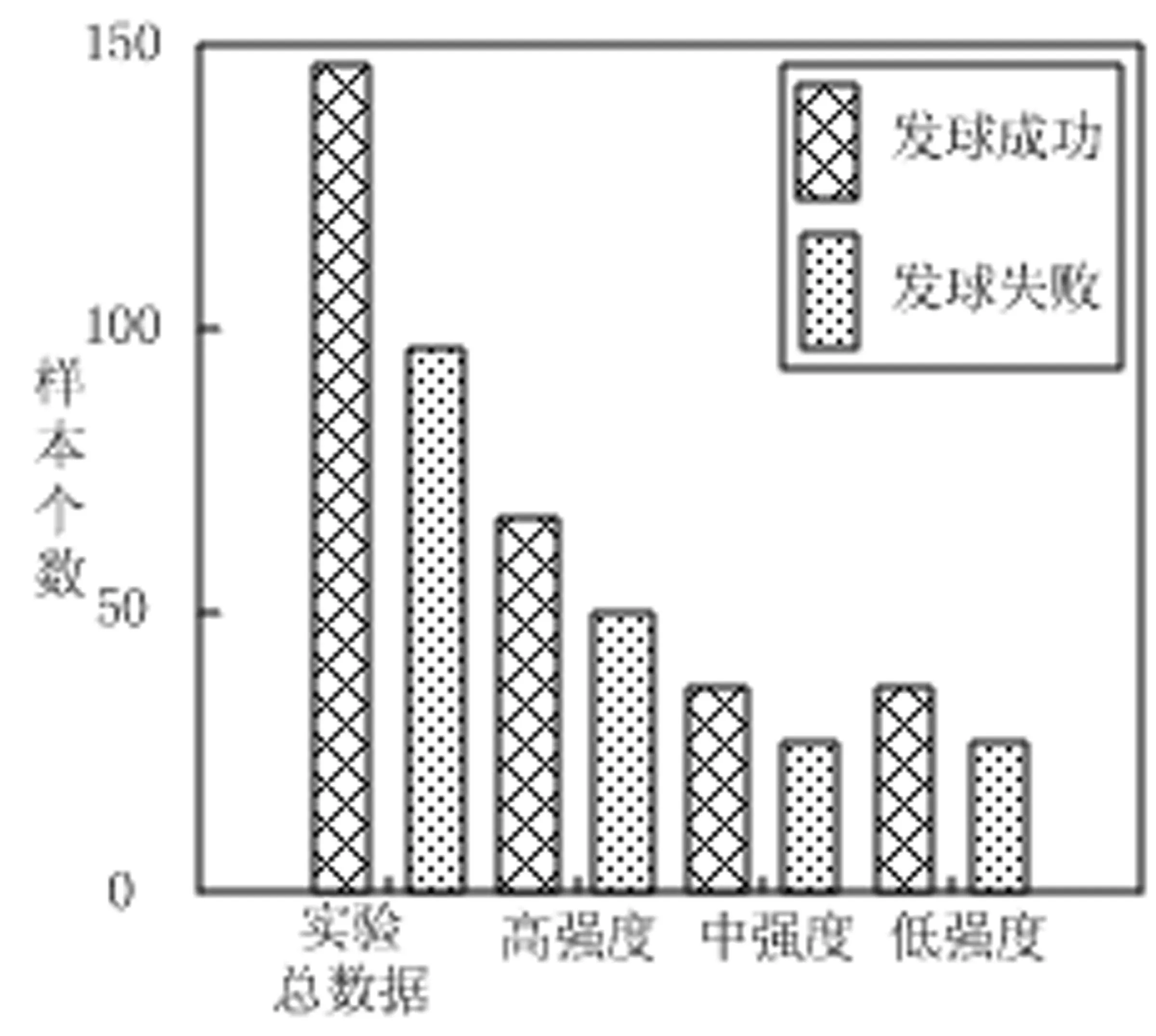
圖5 實(shí)驗(yàn)數(shù)據(jù)統(tǒng)計(jì)圖
如圖5所示,該實(shí)驗(yàn)共采集了240組發(fā)球動(dòng)作數(shù)據(jù)樣本,其中發(fā)球成功樣本為145組,發(fā)球失敗樣本為95組。
將上述實(shí)驗(yàn)數(shù)據(jù)輸入到構(gòu)建模型中,計(jì)算發(fā)球動(dòng)作識(shí)別準(zhǔn)確率系數(shù),具體如表5所示。
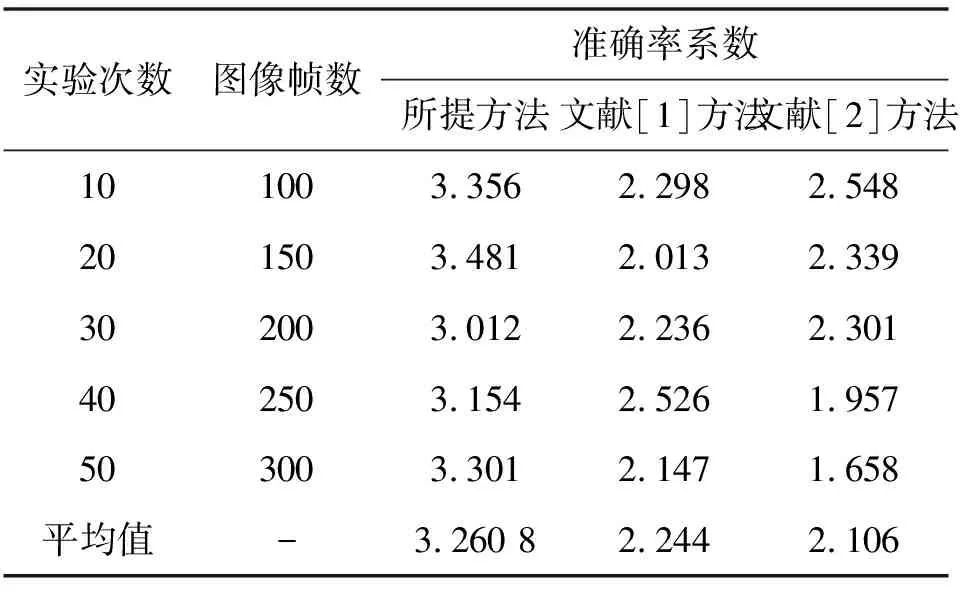
表5 發(fā)球動(dòng)作識(shí)別準(zhǔn)確率系數(shù)數(shù)據(jù)表
如表5數(shù)據(jù)顯示,文獻(xiàn)[1]方法的識(shí)別準(zhǔn)確率系數(shù)平均值為2.244,文獻(xiàn)[2]方法的識(shí)別準(zhǔn)確率系數(shù)平均值為2.106,而構(gòu)建模型發(fā)球動(dòng)作識(shí)別準(zhǔn)確率系數(shù)平均值為3.260 8,遠(yuǎn)遠(yuǎn)高于現(xiàn)有模型水平。
比較三種方法對(duì)145組發(fā)球成功樣本的發(fā)球動(dòng)作識(shí)別耗時(shí),得到對(duì)比結(jié)果如圖6所示:
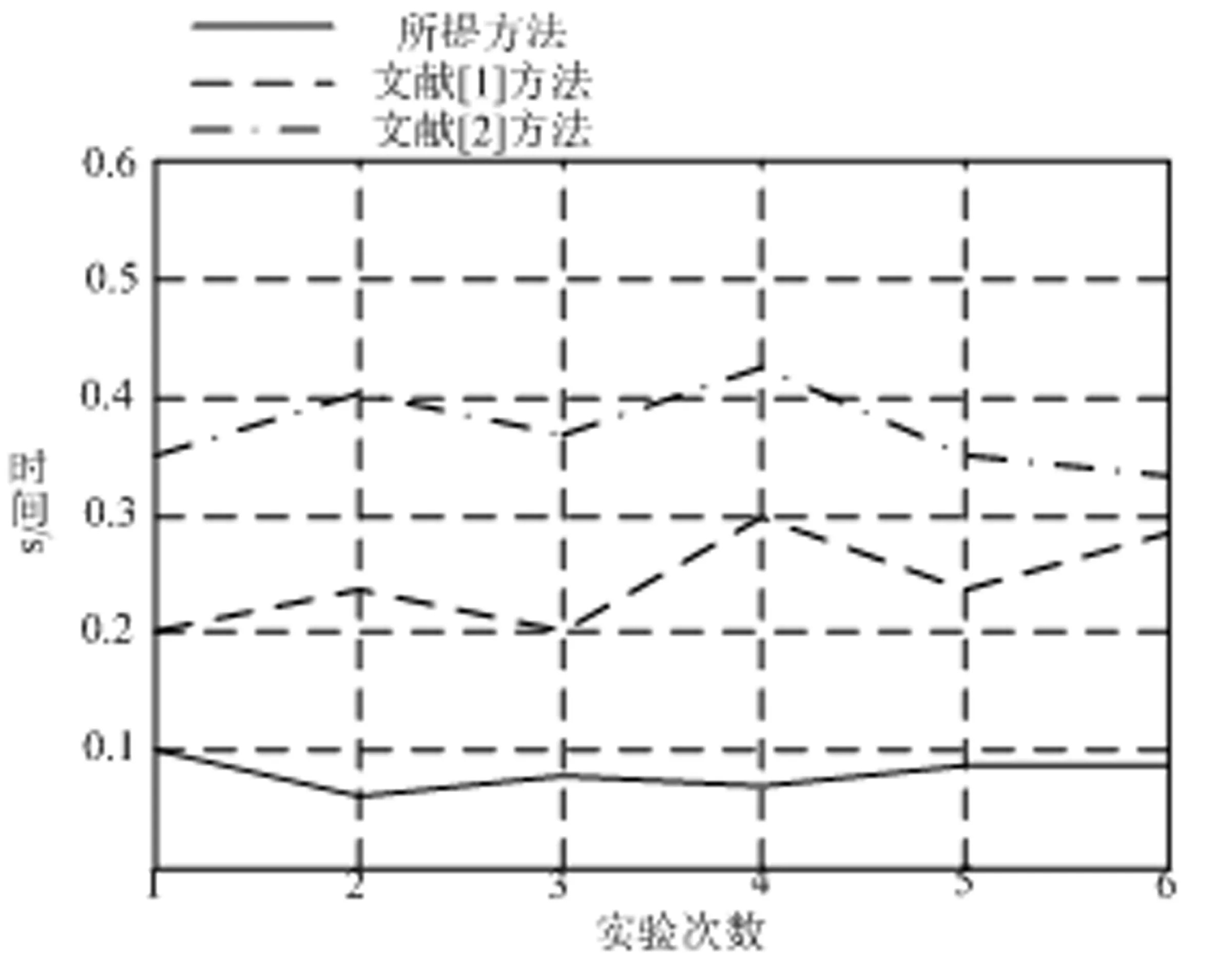
圖6 發(fā)球動(dòng)作識(shí)別耗時(shí)
如圖6所示,文獻(xiàn)[1]方法對(duì)每次發(fā)球的識(shí)別耗時(shí)平均為0.25s,文獻(xiàn)[2]方法對(duì)每次發(fā)球的識(shí)別耗時(shí)平均為0.39s,而所提方法對(duì)每次發(fā)球的識(shí)別耗時(shí)平均為0.08s。由此可見,所提方法對(duì)網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別速度快,識(shí)別準(zhǔn)確率系高,充分表明構(gòu)建模型具備較好的識(shí)別性能。
三、結(jié)語(yǔ)
由于網(wǎng)球運(yùn)動(dòng)的不斷發(fā)展,其對(duì)發(fā)球訓(xùn)練的科學(xué)性與實(shí)效性提出了更高的要求,為提升網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作正確率,本文提出基于貝葉斯算法的網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別模型研究。將貝葉斯算法引入到網(wǎng)球運(yùn)動(dòng)員發(fā)球動(dòng)作識(shí)別中,依據(jù)貝葉斯算法設(shè)計(jì)了分類器,極大地提升了模型的識(shí)別準(zhǔn)確率與效率,為網(wǎng)球運(yùn)動(dòng)員訓(xùn)練以及發(fā)球技能提升提供了有效的手段,并為網(wǎng)球運(yùn)動(dòng)的發(fā)展貢獻(xiàn)自己的一份力量。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52