基于改進EEMD-MB1DCNN的船用柴油機缸套-活塞環故障診斷
2024-02-26 10:55:58王永堅范金宇蔡杭溪趙凱吳怡婷
船海工程 2024年1期
王永堅,范金宇,蔡杭溪,趙凱,吳怡婷
(集美大學 輪機工程學院,福建 廈門 361021)
船用中高速柴油機廣泛地用作各類船舶的發電柴油機,由缸套-活塞環(cylinder liner and piston rings, CLPRs)組成的摩擦副是柴油機的核心部件和易損件。CLPRs長時間在高溫、高壓、重載等惡劣環境下工作,極易發生缸套過度磨損、活塞環斷環等故障問題,其技術狀態對柴油機的工作性能與使用壽命將產生重大影響。
卷積神經網絡(CNN)[1]的理論研究和網絡深度已發展到深度卷積神經網絡(deep convolutional neural network, DCNN),并在圖像識別、機械故障診斷領域得到廣泛地應用。考慮通過測取人為設置缸套-活塞環4種故障狀態(正常狀態、活塞環斷環1道、缸套過度磨損+0.25 mm、缸套過度磨損+0.50 mm,以下簡稱“4種故障狀態”),在不同負載狀態下的振動信號,提出一種基于信息質量篩選準則EEMD分解后的k個固有模態分量IMFs,以期有效體現故障特征的峭度(越大越好)作為衡量指標,對IMFs信號所含信息質量進行評估,重構故障信號,并輸入一維卷積神經網絡(1DCNN)模型,獲得準確度和效率優于傳統故障診斷方法的算法和模型。
1 故障特征提取方法
國內外學者使用EEMD對信號進行重構時,通常選取前n個IMFs組成重構信號[2-3],忽略IMF含有每個工況不同的固有信息。通過傳統EEMD算法分解得到的IMFs排序,可能存在順位靠后含有更多的故障信息IMFs信號被忽略,造成信號信息篩選不充分,有效分量無法得到正確篩選等不足。為解決上述問題,提出一種基于信息質量篩選準則的改進EEMD算法,有效選擇含有較多故障特征固有模態分量IMFs,組成重構信號。
1.1 固有模態分量IMF的相關系數與峭度
經EEMD分解缸蓋振動信號xn(t)的固有模態分量:IMFi(t)=(IMF1,IMF2,…,IMFn-1),其相關系數ρi的數學描述為
(1)
相關系數ρi是研究變量之間相關關系密切程度的統計指標,ρi趨近于1,分離出的固有模態分量IMF與信號相關關系越密切。
峭度Ki用于描述波形尖峰度的一個量綱一的量參數,是衡量信號是否含有較多沖擊成分的時域特征指標。當柴油機缸套壁磨損程度加大時,缸套-活塞環組振動信號含有較多的沖擊成分,此時峭度明顯增大,峭度Ki的數學描述為
(2)
式中:Ki為IMFi的峭度;μi為IMFi的均值。
缸套-活塞環出現故障時從故障缸缸蓋處測取的振動信號經EEMD分解出的IMFi(t)包含不同頻段的固有振動成分,選取能有效凸顯故障特征峭度大的IMFi(t)組成重構信號,可有效篩選故障振動信號[4-5]。
1.2 基于IMF信息質量篩選準則的改進EEMD算法
對能夠凸顯故障特征IMFi分量重構信號的獲取,需滿足如下要求:①組成重構信號的IMFi分量與原信號密切相關(即相關系數ρi越接近1);②該分量包含能有效體現故障的特征量(如峭度)。基于此要求,確定EEMD算法并獲取重構信號的IMF信息質量篩選判別標準為和目標函數f為
(3)
f=max{β|ρi| +(1-β)Ki}
(4)
式中:β、1-β為權重因子,β取0.7。
1.3 多模塊一維卷積神經網絡原理及網絡架構
深度卷積神經網絡(DCNN),其顯著優勢在于:有效緩解傳統神經網絡因參數過多導致運算效率低下、網絡訓練困難、過擬合等。其運算核心是通過構成卷積層的多個濾波器卷積核實現的,隨著卷積核的運動,當前層的神經元與前一層特征圖中的局部區域稀疏連接。機械設備運轉過程中,數據采集獲取的實時振動信號是一維時序向量,1DCNN作為一維卷積運算,其結構簡單,參數變量較少,為此選用該算法作為缸套-活塞環故障診斷研究方法。
充分利用1DCNN的技術優勢,結合本研究實際特點,為更有效提取缸套-活塞環故障特征信息,提出多模塊一維卷積神經網絡(multi block 1-d convolution neural network, MB-1DCNN)方法,將故障特征信息分為故障特征提取與故障模式識別兩部分:①故障特征提取,由數個自組模塊構成,單個模塊包含卷積層、批歸一化層、激活層、池化層;②故障模式識別,在常規全連接層的基礎上加入dropout層,進一步縮減參數量,提升系統運算效率和魯棒性。本研究網絡架構設計遵循奧卡姆剃刀原則,其優點在于在滿足分類效果的前提下,采用淺層網絡結構設計時,缸套-活塞環故障模式識別中可使用更少計算資源獲得更有效的故障模式識別。
2 故障診斷流程及試驗平臺設計
2.1 改進EEMD-MB1DCNN故障診斷流程
基于前述提出的故障診斷方法,結合船用中高速柴油機缸套-活塞環工作特點及常見的故障問題,構建該易損件潛隱故障診斷流程見圖1。
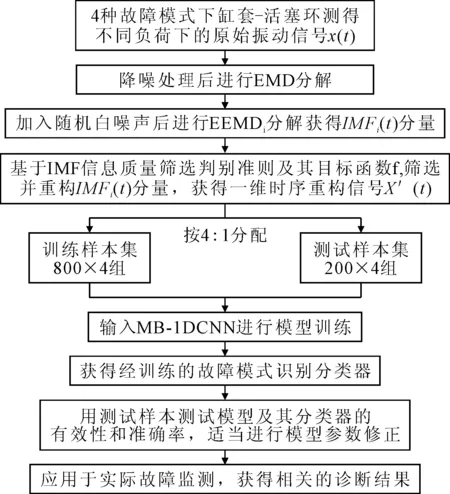
圖1 改進EEMD-MB1DCNN故障診斷流程
1)在不同負載下,分別測取缸套-活塞環4種故障模式下位于故障缸缸蓋處的原始振動信號x(t);將采集信號經降噪處理進行EMD分解后,加入隨機白噪聲nn(t)再進行EEMD分解,得到上述故障模式下各振動信號的固有模態IMFi(t)分量。
2)根據IMF信息質量篩選判別準則及其目標函數f,以能有效凸顯故障特征的峭度特征量(取大者)作為評判指標,對單個IMFi(t)信號所含信息質量進行評估,對EEMD分解所得的各組IMFi(t)進行篩選重構,獲得4種故障模式下新的一維時序重構特征信號X′(t);重構信號按80%的訓練樣本與20%的測試樣本劃分,將訓練樣本集輸入MB-1DCNN網絡訓練,獲得經樣本訓練好的缸套-活塞環故障模式識別分類器。
3)將驗證用測試樣本集輸入訓練好的分類器,驗證模型有效性和準確性,并對分類器進行適當參數調正;將訓練好的模型和分類器應用于船用柴油機缸套-活塞環實際故障診斷,獲相應故障診斷結果。
2.2 試驗平臺的設計與搭建
為驗證所提方法對船用中高速柴油機缸套-活塞環組潛隱故障診斷的有效性,設計并搭建試驗平臺。試驗平臺選用船用高速柴油機組,柴油機型號為QC-50BW-CY;額定功率/轉速為50 kW/1 500 r/min,缸徑/沖程:105 mm/125 mm,4缸;發電機組型號:WHI224;負載箱采用水電阻負載水缸;信號采集設備選用DH5922型信號采集儀和DHDAS測試分析系統。加速度傳感器最大可測加速度為50 g m/s2,諧振頻率為kHz,采用恒流源24VDC,4 mA。
試驗中,在缸蓋頂部位置安裝加速度傳感器實時采集振動信號,在柴油機輸出軸飛輪端使用光電傳感器采集轉速信號,通過反光標簽反射信號記錄柴油機輸出軸轉速,通過改變水電阻負載水缸電阻片與鹽水接觸面積設置柴油機外加負載。試驗過程中,通過NO.1缸的人為設置4種故障模式進行試驗,試驗工況按4種故障模式下5種負載狀態(空載、25%、50%、75%、90%負載,轉速1 550 r/min)開展試驗。
3 試驗數據采集與分析
3.1 原始振動信號特點與時頻分析
平臺船用柴油機額定轉速為1 550 r/min,每個工作循環持續時間約為0.077 s。由于光電傳感器實際采集轉速無法穩定在額定轉速,其對應每個工作循環的持續時間在0.075~0.08 s之間變化,采樣頻率為51.2 kHz。為確保單個樣本包含1個完整的工作循環的信息,設定單樣本信號長度為4 096。
將安裝于柴油機NO.1缸蓋上的加速度傳感器采集的原始振動信號經A/D轉換器和DHDAS軟件轉換后,可獲得對應的數字信號。4種故障模式下不同負載測得10個工作循環各信號點均值連線的信號見圖2,體現1個工作循環原始振動信號數據。對比圖2a)和b),活塞環斷環1道故障在峰值附近出現更多幅值大的重復沖擊信號,時頻域波形與正常狀態信號波形有明顯區別。對比圖2c)和d),盡管缸套過度磨損程度不同,但其振動信號波形相近,說明同類型故障,盡管嚴重程度不同但可能呈現相同的故障特征。
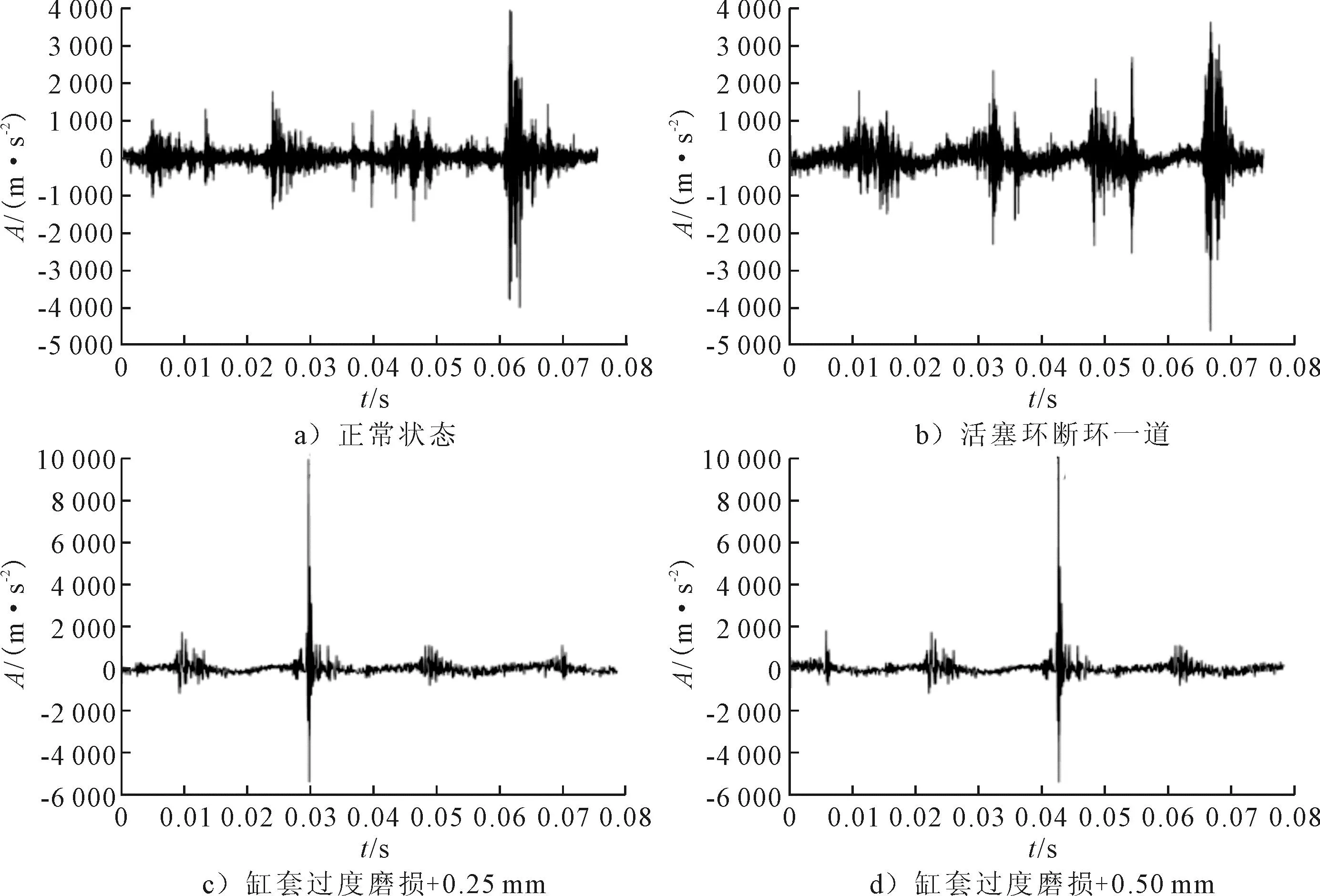
圖2 十個工作循環的均值時頻信號
3.2 改進EEMD算法有效性分析
為評估文中所提故障診斷方法對柴油機4種故障狀態特征提取的有效性,采用經奇異值分解(singular value decomposition, SVD)的奇異值作為特征向量和振動信號特征提取有效性的衡量指標,同時通主成分分析法(principal component analysis, PCA)對改進EEMD算法與傳統EEMD算法分別處理同一原始信號獲得的結果進行分析,得到4種故障狀態特征值三維散點分布,見圖3。分析圖3a)、b)可知,傳統EEMD針對缸套-活塞環組四種故障狀態采集振動信號特征量提取效果不佳,類與類之間歐式距離無法拉開。改進EEMD算法4種故障狀態樣本集群的歐式距離明顯增大。
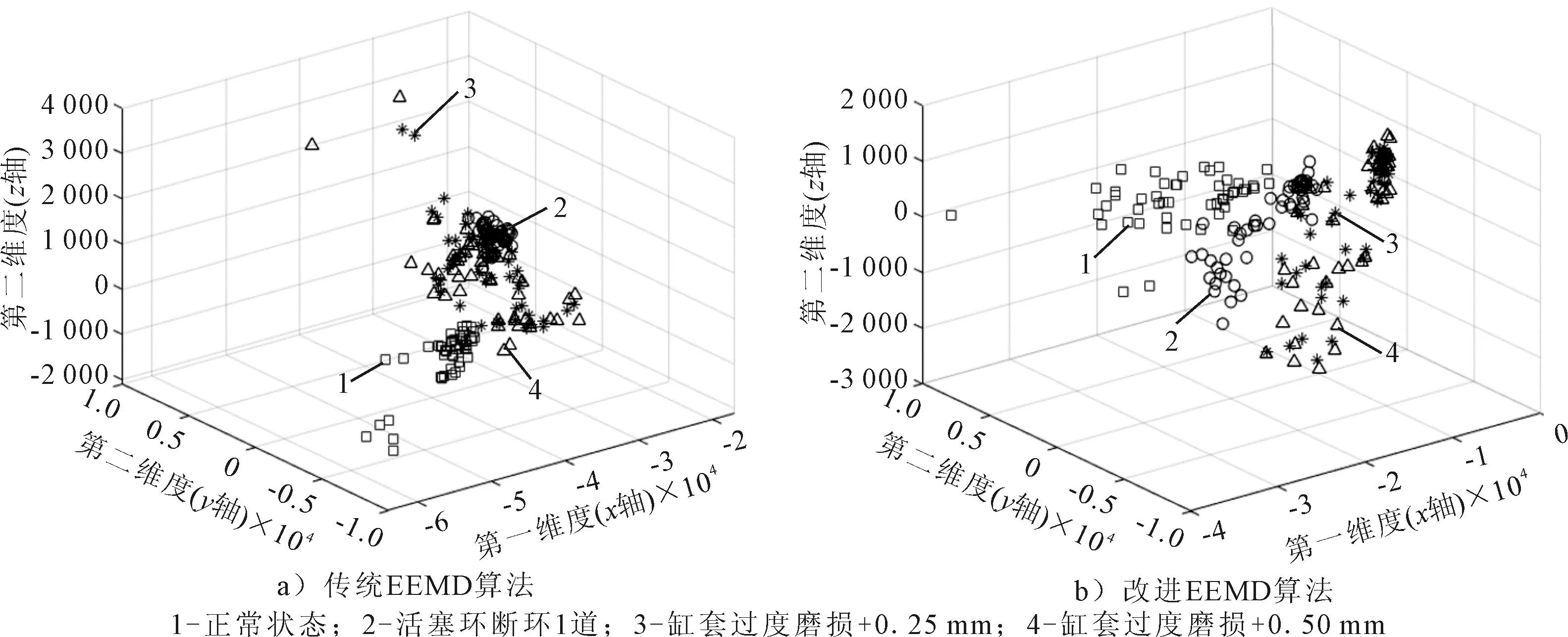
圖3 EEMD改進前后奇異值三維特征值散點
3.3 基于改進EEMD-MB1DCNN缸套-活塞環故障診斷分析
3.3.1 網絡模型參數設置
基于前述改進EEMD-MB1DCNN網絡結構設計原則,經反復試驗設置四種故障狀態下缸套-活塞環故障診斷MB-1DCNN模型,該模型各參數設置見表1。為抑制過擬合問題,Dropout層以一定概率將網絡模型中各神經元歸0,卷積層與池化層之間均設置批歸一化層和激活層(ReLU)。此外,以準確率和損失率為評價指標,本實驗分別驗證學習率0.01、0.1和0.5與迭代次數之間關系,在學習率為0.1,最大迭代次數為50的情況下,此時模型準確率最高,損失率最低。
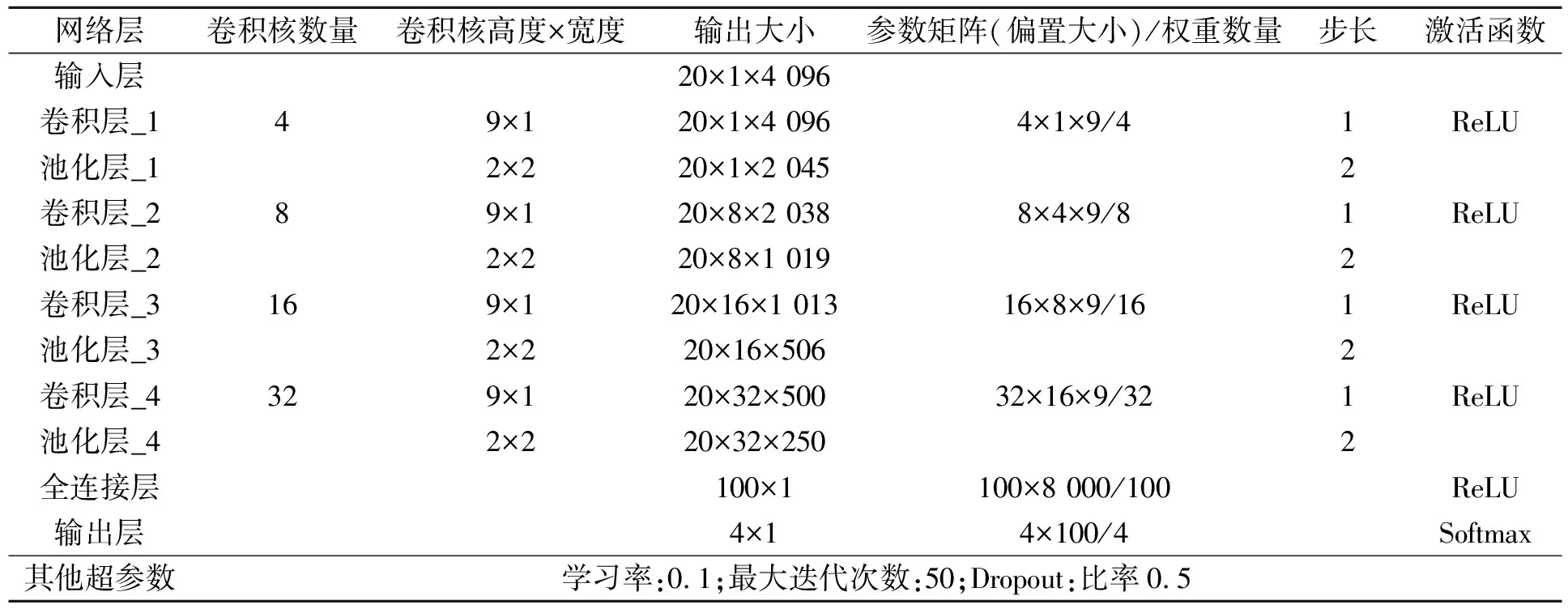
表1 MB-1DCNN各參數值設置
3.3.2 數據采集
本試驗,數據采集與診斷分析過程如下。
1)為保證有足夠量的數據作為改進EEMD-MB1DCNN模型的訓練樣本輸入量,試驗中,4種故障狀態下,5個負載工況下分別采集200個信號樣本,按4∶1的比例以隨機取樣方式分割為訓練樣本集與測試樣本集。
2)在故障特征提取階段,采用改進EEMD算法將4種故障狀態、5個負載工況下分別測取的振動信號分解為固有模態分量IMFs,依據第2節中的IMF信息質量判別準則,以能夠有效凸顯故障特征的峭度(峭度大)為選取原則,篩選如圖6所示4種故障模式下的IMFs分量重構信號頻域樣本集。
3)以32組訓練數據為一批次輸入訓練網絡,迭代50次,MB-1DCNN模型完成訓練后采用Softmax作為激活函數,計算該訓練數據發生4種故障模式的概率,最終通過全連接層將被測數據歸入柴油機4種故障模式對應項中,并獲得相應診斷結果。
3.3.3 IMFs重構信號頻域分析
通過改進EEMD算法IMF信息篩選準則篩選后的IMFs,斷環故障高頻頻段的IMF權重得到提升,該篩選結果符合斷環實際故障發生時的機理特征。磨損狀態下一個工作循環的各沖程中蘊含重復性振幅大的沖擊信號,但由于部件工作間隙變大,該信號出現明顯減少,在做功沖程時振幅峰值達到最大,符合缸套過度磨損故障時信號總體能量減少的故障機理特征。盡管缸套過度磨損程度加劇,但在頻域波形并未產生顯著故障特征區別。
3.3.4 實驗結果
基于前述改進EEMD-MB1DCNN設計原則,充分利用Python的TensorFlow深度學習框架優點,通過NO.1缸蓋上的振動信號傳感器,采集4種故障狀態、不同負載下一個工作循環原始振動信號,對采集的各組原始振動信號進行EEMD分解,根據IMF信息質量篩選判別準則,以IMF峭度大的分量為選取標準,對各組IMF分量進行篩選重構,獲得4種故障模式下,不同負載下新的一維時序重構特征信號,作為MB-1DCNN模型的輸入,按既定設置的模型參數進行網絡訓練,獲得測試樣本集的故障識別率為98.95%。
為進一步驗證所搭建MB-1DCNN模型各層學習能力和數據在CNN層間流動效果,使用t-SNE(t-distributed stochastic neighbor embedding)非線性降維約簡算法分析各層學習的特征分布并可視化顯示二維散點故障特征分布,實驗結果見圖4。

圖4 測試樣本輸入MB-1DCNN模型不同層級t-SNE特征可視化輸出
圖4a)為缸套-活塞環組4種故障原始信號輸入的分布結果,由于測取信號的冗余性,各類別信號難以區分;經第1層卷積池化學習后,輸出樣本逐漸向各自區域聚集,但還很分散且相互混雜,再經第2層、第3層卷積池化學習后,各類別的樣本信號逐漸聚攏,相互混雜的樣本逐漸減少,各類別的特征可較清楚地被分辨出,經全連接層整合各類別特征后,同狀態下特征分布距離進一步各過程的演示,說明本實驗MB-1DCNN被縮小,同時增大不同狀態下特征距離,經softmax輸出層后,各狀態特征明顯分清。通過上述各過程的演示,說明本實驗MB-1DCNN模型強大自學習能力和非線性映射能力。
此外,圖4顯示,缸套過度磨損+0.25 mm故障狀態與磨損+0.5 mm故障狀態混雜在一起,隨著模塊特征值的提取與池化層過濾縮減特征數量,同類數據簇逐漸聚攏,不同類別的數據簇間距拉大直至徹底分開。MB-1DCNN不僅解決本文第3.3.3節不同磨損程度出現相似頻域波形,還解決無法精確歸集缸套過度磨損+0.25 mm與磨損+0.5 mm特征向量的問題。
3.4 與其他算法對比實驗
為驗證所設計的模型及算法的性能,通過改進EEMD-SVD-RF與改進EEMD-MB1DCNN算法進行對比實驗,其中,改進EEMD-SVD-RF以隨機森林RF(Random Forest,RF)作為分類器。考慮到隨機取樣對分類結果的影響,從缸套-活塞環故障樣本數據庫中隨機選取10組測試數據輸入上述兩個模型,10次故障識別結果準確率與效率(時間s),見表2。
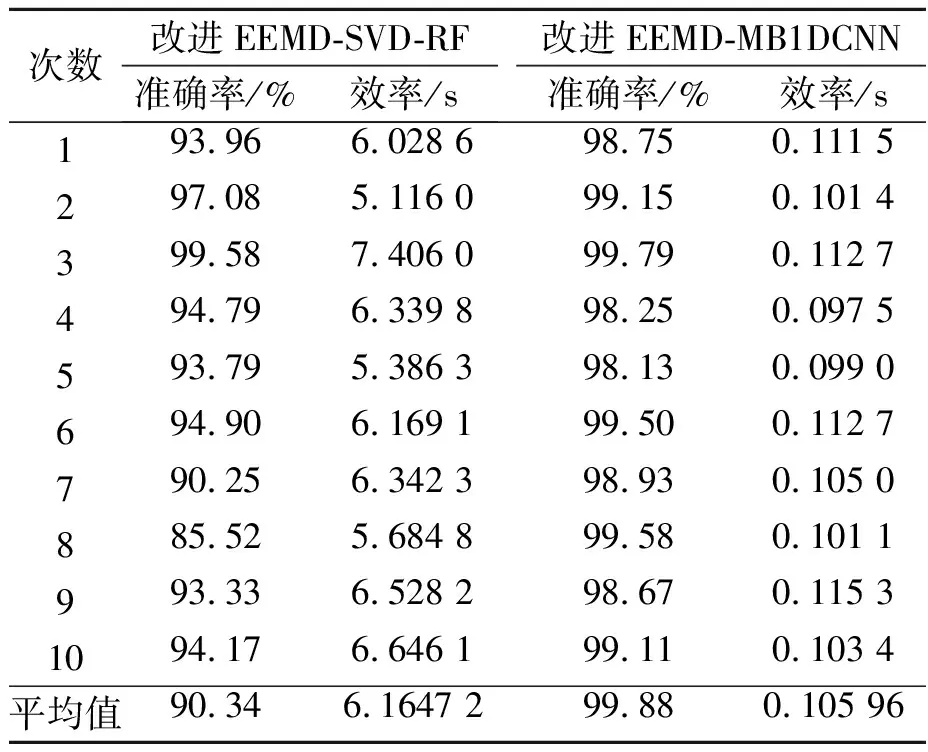
表2 兩種算法的10次分類預測結果
從表2中可以看出。文中所提算法準確性與可靠性均優于傳統機器學習算法RF,且在效率上MB1DCNN用時明顯少于算法RF,顯示該算法的合理性和適用性。
4 結論
1)本試驗平臺設計與以往使用電機倒拖驅動、不加負載空載運行的實驗設計不同[6],原始振動信號是在不同載荷的燃燒運行狀態下采集獲得的柴油機振動信號,使得采集獲得的柴油機振動信號能更接近實際柴油機工況。經測試,使用所設計的模型及算法可獲得較高的故障識別準確率,該方法可應用于船用柴油機的智能故障診斷。
2)所提出的改進EEMD分解IMF信息篩選準則能有效提取分量中的故障信息,重構信號中的故障特征量更為突出。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
計算物理(2014年2期)2014-03-11 17:01:44
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31