自行車是怎么保持平衡的?
2024-02-27 13:34:48差評君
世界博覽 2024年4期
差評君

在過去的一百多年時間里,自行車為什么不會倒這個問題,讓無數物理學家、數學家想破了頭。為此他們還發表過英、德、法、俄、意等各種語言的上百篇論文。法國科學院還為此設立了物理競賽。而直到今天,這個問題也不能說是完全解決了。這樣一個看似簡單的問題,為什么困擾了無數科學家一個多世紀?
其實自行車早在18世紀就被法國人發明出來了,世界上第一輛自行車跟“自行”沒有半毛錢關系。它沒有驅動裝置,沒有腳踏板,甚至沒有轉向把手。看上去就是一個帶兩個輪子的長條板凳,得靠人來蹬地前進。由于實在太過原始,于是嚴謹的德國人給它加上了可控方向的車把。接下來幾十年的時間,自行車的設計經過了歐洲多國的改進,期間外觀甚至一度變成了非常反人類的造型。
到了1874年,終于它被英國人勞森改造成了正常人都能騎的樣子。勞森發明了一種精密的機械結構——通過一條鐵鏈讓前輪在后輪的傳動下運動,也就是我們現在熟悉的鉸鏈。比馬背還高的座椅也終于有機會從直徑超過一米的前輪上移向更低更靠后的位置。可以說,“自行車”從一開始就不是依托縝密的物理學、數學理論公式設計而來,它的誕生完全根據生活經驗。不過存在即合理,自行車不僅存在了近兩個世紀之久,而且可以不借助人力自己保持平衡了,如此神奇的現象,肯定應該有個能解釋它的科學依據吧? (以下討論的穩定性都是“自穩定”,是指無人操作狀態下自行車的穩定性。)
于是科學家們開始倒回去反推它的設計原理,結果發現:居然沒法用現有的科學理論去解釋自行車的平衡問題!1869年英國著名的力學家、工程師蘭金發表了一篇題為《自行車運動的動力學原理》的文章,這也是最早討論自行車平衡問題的論文。1899年,英國數學家惠普爾建立了一個由車體質量、車輪半徑、轉向角度等等25種復雜參數組成的模型,來研究不同參數對自行車平衡性的影響。1910年,在惠普爾的數據之上,德國物理學家索墨菲和數學家克萊因提出了“陀螺效應”——這個理論也被公認為是自行車保持平衡的奧秘。科普團隊真理元素曾經做過實驗,把幾十斤重的鐵餅,固定一端,在高速旋轉的狀態下,這個裝置完全能戰勝重力,給人一種不合常理的感受,就像有人拉著另外一端似的懸在半空。如果把它換成質量更輕的自行車車輪,那就更不在話下了。

因為車輪轉動的方向是不變的,它的角動量方向也會一直指向側邊,而當輪胎的旋轉速度足夠快的時候,不管車上有沒有人操控,它們都會保持一個幾乎恒定的方向前進,即使是出現傾斜,車體也不會隨便改變方向,而是發生平移。這也是為什么,越是速度快的自行車,越是難以迅速轉彎,因為你要施加足夠大的力來對抗車輪的角動量。說到這,不知道“陀螺效應”這個理論能不能說服大家,而這套理論也主導了自行車研究界好長一段時間。
直到1970 年,有個叫瓊斯的英國化學家突然跳出來說,自行車能夠保持平衡,并不是因為“陀螺效應”而是另有原因!這人確實沒瞎掰,他是真的發明出了抵消“陀螺效應”的自行車。這輛自行車的特別之處在于它有一大一小兩個前輪!大前輪在小前輪的傳動下,會向反方向旋轉,也就是說這兩個輪子的角動量是完全相反,且相互抵消的,所以這輛車成功地消除了“陀螺效應”!神奇的是,它也能和普通自行車一樣保持平衡。一個近百年來公認的理論就這樣被推翻了。
瓊斯也給出了自己的理論解釋。他認為,自行車之所以能保持平衡,是因為自行車的前輪設計里,有一個叫“前輪尾跡”的東西。簡單說就是自行車前叉的延長線跟前輪中心垂直線的距離。懂汽車的朋友可能聽說過一個詞“主銷后傾”,在原理上它和前輪尾跡是同一個東西。為什么這是自行車保持平衡的關鍵呢?當自行車行駛的時候,如果發生傾倒,車頭會朝同一個方向轉動,然后重心就會重新回到自行車前輪的下方,而出現這種情況,就是因為前輪中心比車把更靠前,重心會帶著轉向軸向一個方向轉動。所以瓊斯認為前輪尾跡越長,自行車的平衡能力也就越好。雖然他的理論聽起來很有道理,但這就是自行車保持平衡的答案嗎?

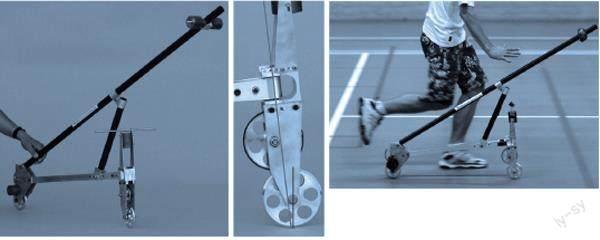
這輛自行車在沒有“陀螺效應”并且“前輪尾跡”為負的情況下,依然能保持自平衡。
到了2011年5位學者在《科學》雜志上發表了一篇文章,他們論證了在既沒有“陀螺效應”也沒有“前輪尾跡”的條件下,自行車照樣可以行駛得很穩定。他們做了一個更奇葩的自行車,先是在前后輪上加了反轉的輔助輪,然后又讓車輪中心在前叉之前。所以這輛車既沒有“陀螺效應”,又是一個負的“前輪尾跡”,當然,它還是可以保持平衡穩定前進。那這輛車是如何保持平衡的?這輛自行車通過車身結構,來控制自身的質量分布。于是這5位學者給出結論:壓根不用什么“陀螺效應”和“前輪尾跡”,只要在一定的質量分布的條件下,完全可以自平衡。
這篇論文并不是完全否定了前人的研究。相反,他們認為“陀螺效應”和“前輪尾跡”的理論非常重要,因為他們發現,其實自行車保持平衡的秘密早就被我們掌握了。還記得1899年英國數學家惠普爾建立的模型嗎?這個模型由25個復雜參數組成,并涉及兩個二階微分方程。而這些方程的解表明,在受到微小擾動后,自行車的傾倒趨勢會隨時間而衰減,直至直立向前行駛。用大白話說就是,如果自行車要傾倒,就一定會發生轉向,而有了這個轉向就會使車子重新回正。所以他的研究就已經解釋了自行車為啥不會倒。而“陀螺效應”和“前輪尾跡”理論其實是在解決為什么自行車傾倒后會發生轉向的問題。
除此之外,有無數其他參數都可能會對穩定性造成影響。比如自旋動量,車把的傾斜,質心位置,前后組件的慣性等等。用5位作者的話說:自穩定的一個簡單必要條件是——必須存在至少一個傾斜導致轉向的因素。“陀螺效應”和“前輪尾跡”并沒有錯,他們都是自行車自穩定中的充分不必要條件。而這5位學者的研究為其增加了新的充分不必要條件,即車身質量分布。
所以,自行車保持平衡并不是一個所謂的“未解之謎”,只是在科學家們的研究下,這個問題經過了三次迭代,一次比一次完整,一次比一次理解深刻。現在已經有自動程序可以模擬自行車的平衡狀況,大家可以通過調整不同參數來研究對自行車平衡性的影響。未來,說不定科學家們還會發現自行車保持平衡的新條件。
大家早已經可以輕松駕馭自行車了,你還在研究為啥自行車不會倒,豈不是沒什么實用價值?法拉第用圓盤發電機來展示電磁感應原理時,一位觀眾問,“這東西有什么用呢?”而法拉第回答:“一個剛出生的嬰兒有什么作用呢?” 正是有了這樣的科學基礎,無數后人才能將科學理論轉化成現實世界的應用。這才是科學家們畢生努力的意義。
(責編:南名俊岳)
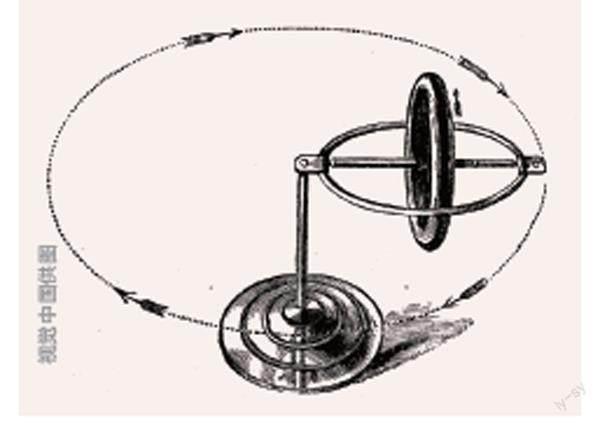
一是定軸性,二是進動性。拿大家小時候玩過的陀螺來說,旋轉的陀螺,狀態非常穩定,就算遇到外力干涉,它的平衡都很難被破壞掉。這是因為高速旋轉的物體,會產生物理學上的“角動量”。力乘以力臂叫“力矩”,所以動量乘以動量臂就叫動量矩,也就是角動量。我們可以用“右手定則”來判斷角動量的方向。此時陀螺的角動量方向就是垂直向上。而角動量的方向一旦形成,就極難改變,這就是“陀螺效應”的定軸性;陀螺除了“自轉”以外,還會出現圍繞垂直軸而形成的“公轉”,這個狀態就叫作陀螺進動。
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
計算機應用(2022年2期)2022-03-01 12:33:42
核科學與工程(2021年4期)2022-01-12 06:30:26
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
今日農業(2020年19期)2020-12-14 14:16:52
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
中學物理·高中(2016年12期)2017-04-22 11:53:03