迭代學(xué)習(xí)的四旋翼無人機重復(fù)航跡跟蹤控制實驗研究
2024-03-01 08:53:34陳曉雷仇思超張開碧
現(xiàn)代電子技術(shù) 2024年4期
關(guān)鍵詞:實驗
陳曉雷,仇思超,張開碧,郭 鵬
(1.重慶郵電大學(xué),重慶 400065;2.四川航天系統(tǒng)工程研究所,四川 成都 610100)
0 引言
新工科建設(shè)的核心目標是培養(yǎng)高素質(zhì)復(fù)合型新工科人才,其內(nèi)涵是工程能力的培養(yǎng),重在實踐模式與教學(xué)方法改革,讓學(xué)生學(xué)習(xí)掌握并具備解決復(fù)雜工程問題的能力與方法。清華大學(xué)校長邱勇表示,21 世紀的工程教育正在向跨學(xué)科交叉、跨領(lǐng)域、跨國家、跨文化合作轉(zhuǎn)變。大學(xué)要完善促進學(xué)科交叉的體制機制,構(gòu)建學(xué)科交叉人才培養(yǎng)體系,努力培育工程科技領(lǐng)域的創(chuàng)新人才[1]。
目前,我校以強化學(xué)生的工程實踐與創(chuàng)新能力的思想為指導(dǎo),推進實驗實踐教學(xué)改革,在人才培養(yǎng)方案中的專業(yè)實踐創(chuàng)新能力培養(yǎng)和實踐培養(yǎng)模式改革中,非常重視對于大學(xué)生創(chuàng)新創(chuàng)業(yè)能力的訓(xùn)練。基于這樣的背景,設(shè)計一個以四旋翼無人機為載體的跨學(xué)科實踐教學(xué)平臺。四旋翼無人機在飛行過程中具有能夠垂直起降、定點懸停等優(yōu)點,已經(jīng)被廣泛應(yīng)用于軍事和民用領(lǐng)域。精確的航跡跟蹤是四旋翼無人機順利完成指定任務(wù)的前提。因此,如何設(shè)計航跡跟蹤控制算法來提高指定航跡的跟蹤精度具有重要的理論意義和研究價值[2]。
四旋翼無人機作為一個欠驅(qū)動系統(tǒng),利用4 個電機提供的輸入量去控制6 個輸出量,同時各個變量之間存在耦合關(guān)系,在實際飛行過程中,還需要考慮到模型參數(shù)(如模型質(zhì)量、轉(zhuǎn)動慣量及升力系數(shù)等)的不確定性以及外界的干擾影響(如風(fēng)干擾)的存在[3]。為了實現(xiàn)四旋翼無人機在其他不確定因素干擾下的精確航跡跟蹤控制,需要設(shè)計控制器來保證其在外部干擾作用下的穩(wěn)定性。
1 四旋翼無人機實驗平臺
四旋翼無人機實驗平臺由機架和機載電子設(shè)備組成。機架是無人機的主要受力部件,要求重量輕、結(jié)構(gòu)強度高、具有一定韌性。實驗平臺選用軸距為450 mm的尼龍纖維四旋翼無人機機身,如圖1 所示。

圖1 四旋翼無人機實驗平臺
該無人機平臺在4 個軸臂上各有一個無刷電機,如圖2 所示,用于控制無人機姿態(tài)及高度。對邊方向上的一對電機分別控制無人機的俯仰角與橫滾角,對角線上的一對電機控制無人機的航向角,4 個電機同時作用產(chǎn)生的力用于控制無人機的高度。機載電子設(shè)備包含Pixhawk 4 飛行控制器、樹莓派、GPS 模組等。
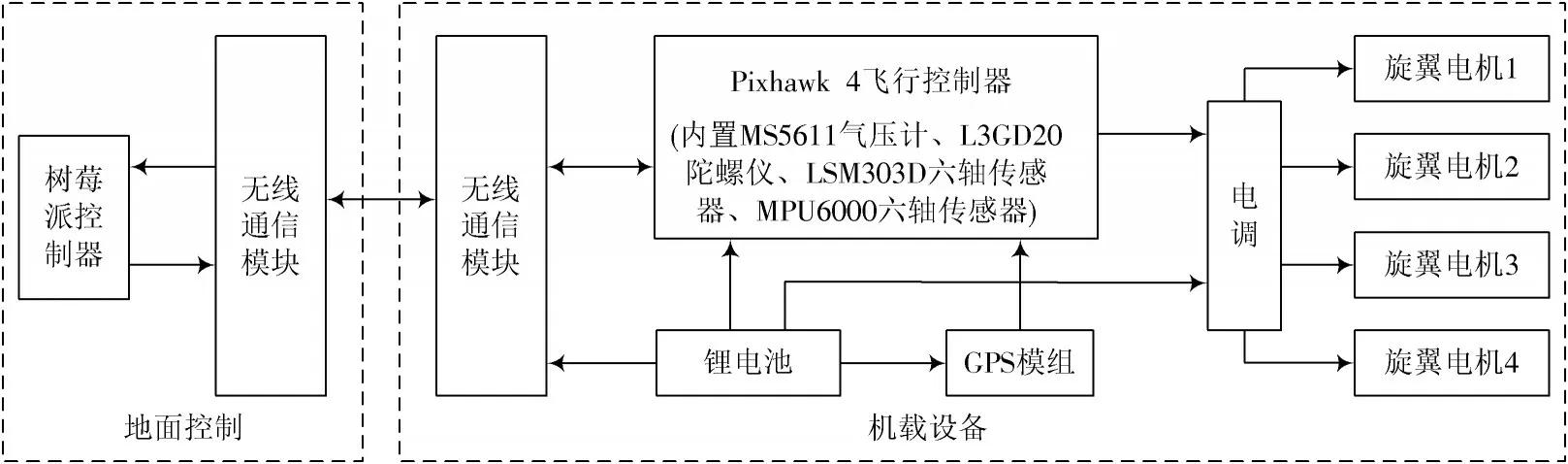
圖2 四旋翼無人機硬件系統(tǒng)框圖
2 四旋翼無人機動力模型
2.1 四旋翼基礎(chǔ)模型
為了對四旋翼無人機進行動力學(xué)建模[4?5],定義了如圖3 所示的結(jié)構(gòu)圖。

圖3 四旋翼無人機結(jié)構(gòu)
對于一個“X”型配置的四旋翼無人機,其垂直運動是通過同時增加或減少4 個螺旋槳轉(zhuǎn)速實現(xiàn)的,螺旋槳(1,4)和(2,3)的轉(zhuǎn)速差會改變橫滾角,從而實現(xiàn)左右運動,螺旋槳(1,3)和(2,4)的轉(zhuǎn)速差會改變俯仰角,從而實現(xiàn)前后運動。偏航運動是通過螺旋槳(1,2)和(3,4)產(chǎn)生的反扭力矩的差值實現(xiàn)的。
定義慣性坐標系(oe,xe,ye,ze) 和機體坐標系(ob,xb,yb,zb),如圖3 所示。
向量P=(x,y,z)T和Θ=(?,θ,ψ)T分別表示慣性坐標系下的位置和姿態(tài)(橫滾角、俯仰角和偏航角),向量?b=(p,q,r)T表示機體坐標系下的角速度。
式 中:S*、C*、T*、SEC*分別表示sin(·)、cos(·)、tan(·)、sec(·)。為了便于控制器的設(shè)計,假設(shè)橫滾角和俯仰角的變化很小,則近似為單位對角矩陣。因此,歐拉角速度可以近似等于機體角速度,結(jié)合式(1)、式(2)和文獻[6?8]中的動力學(xué)方程,得到四旋翼無人機的動力學(xué)模型如下:
式中:m是四旋翼無人機的總質(zhì)量;g是重力加速度;J=diag([Jxx,Jyy,Jzz])為對角慣性矩陣;Jr為螺旋槳的慣性力矩;Ω=-Ω1+Ω2-Ω3+Ω4,分別對應(yīng)4 個螺旋槳的轉(zhuǎn)速;kdi(i=1,2,…,6)為阻尼系數(shù);Uz為位置系統(tǒng)的控制輸入;U?、Uθ、Uψ分別為3 個姿態(tài)角的控制輸入。Uz、U?、Uθ、Uψ具體表達式如下:
式中:d為電機到四旋翼重心之間的距離;c=cm/ct,cm為扭矩系數(shù),ct為拉力系數(shù);表示螺旋槳提供的拉力。
利用Pixhawk 4,基于擴展卡爾曼濾波器進行運動數(shù)據(jù)處理。飛行控制器通過卡爾曼濾波器,將GPS、電子加速度計、電子陀螺儀、電子羅盤、氣壓計信息測量轉(zhuǎn)換得到的運動數(shù)據(jù)信息與狀態(tài)空間方程估算得到的運動數(shù)據(jù)進行融合,得到更可靠的數(shù)據(jù)。但該狀態(tài)空間方程在推導(dǎo)過程中引入了過多的假設(shè),并且是在無人機懸停的條件下建立的,因此該模型在控制飛行器懸停時效果很好。然而,當達到更高的機動速度時,許多額外的因素,例如空氣阻力、與環(huán)境潛在的相互作用等均會對無人機造成很大的干擾。例如:四旋翼無人機貼近地面時,螺旋槳高速旋轉(zhuǎn)產(chǎn)生的推力作用在地面時,產(chǎn)生的推力會比作用在空氣時大許多;環(huán)境中風(fēng)等外部因素會引起更大的影響。大多數(shù)控制法則將此類影響視為干擾。在本文中,將采用類似的方法,不對外部干擾進行建模,但在周期性運動的重復(fù)執(zhí)行期間不斷地補償干擾所帶來的控制誤差。
2.2 控制算法設(shè)計
四旋翼無人機控制結(jié)構(gòu)可分為位置環(huán)、速度環(huán)、姿態(tài)環(huán)和角速度環(huán)四個部分。控制結(jié)構(gòu)圖如圖4 所示。
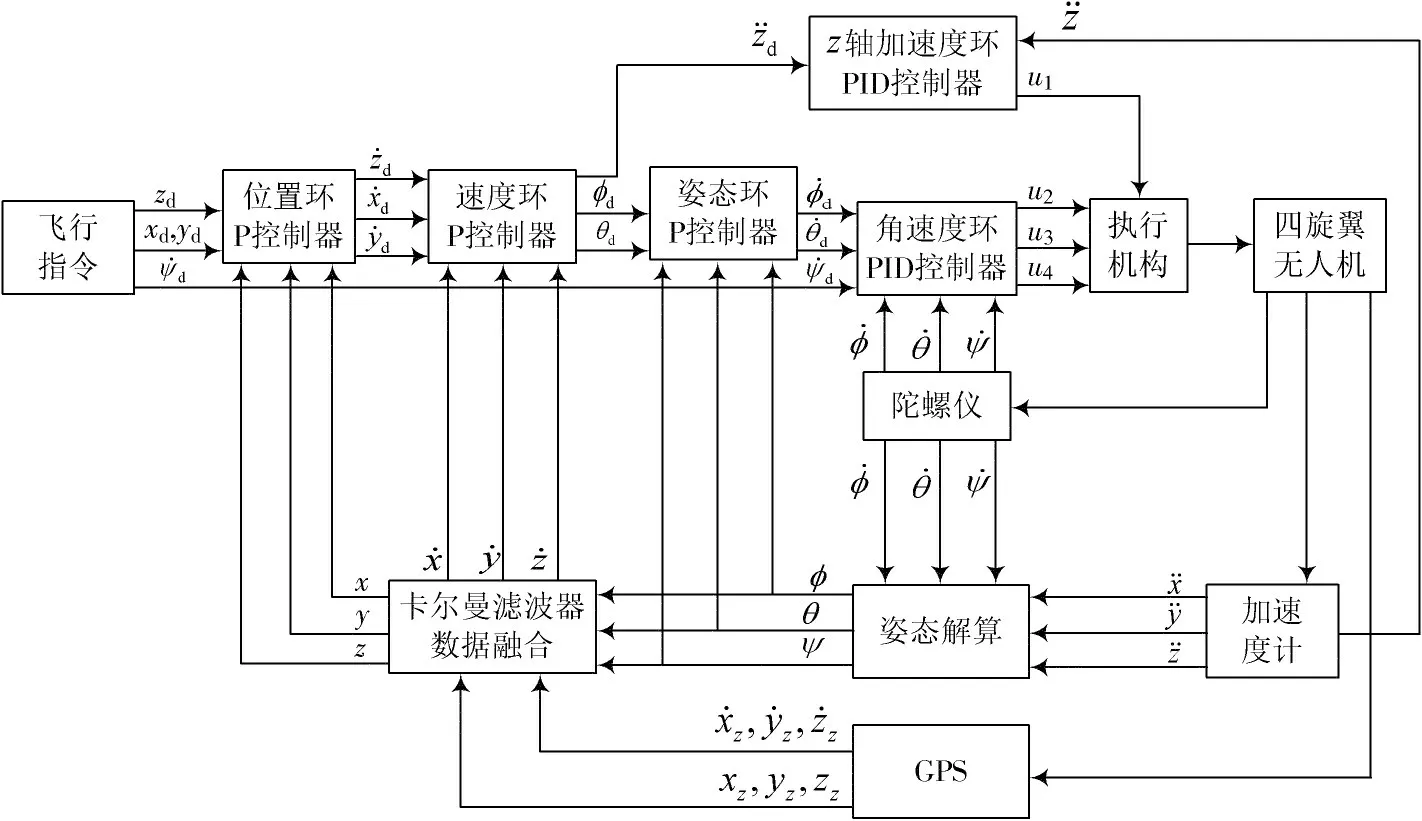
圖4 基于串級PID 的四旋翼無人機位置控制結(jié)構(gòu)圖
各個環(huán)節(jié)控制器輸入量和輸出量對應(yīng)關(guān)系如下。
位置環(huán)控制器根據(jù)飛行指令給出的期望位置(xd,yd,zd)和數(shù)據(jù)融合得出的位置(x,y,z)得到期望速度速度環(huán)控制器根據(jù)期望速度和融合得出的速度得到期望姿 態(tài)(?d,θd)。姿態(tài)環(huán)控制器根據(jù)期望姿態(tài)和姿態(tài)解算的姿態(tài)(?,θ)得到期 望角速度。z軸加速度環(huán)控制器根據(jù)期望z軸加速度和加速度計測得的得出對應(yīng)到電機轉(zhuǎn)速的輸出量。期望航向角的角速度由飛行指令直接給出,角速度環(huán)控制器根據(jù)期望角速度及陀螺儀測量得出的角速度得到對應(yīng)到4 個電機上的轉(zhuǎn)速輸出量。
姿態(tài)解算算法負責(zé)融合陀螺儀和加速度計測得信息,解算得出飛行器姿態(tài)。卡爾曼濾波器負責(zé)融合GPS采集的位置信息及運動學(xué)建模所得的位置信息。
目前,串級PID 控制算法是應(yīng)用最廣泛的跟蹤控制算法。Pixhawk 4 采用串級PID 控制算法進行位置控制,但其只能達到航跡跟蹤控制的一般性能,如果要完成對于響應(yīng)時間要求高的航跡,其控制效果往往不理想。本文通過引入迭代學(xué)習(xí)控制算法,利用迭代學(xué)習(xí)控制算法優(yōu)化串級PID 控制效果。
首先根據(jù)所要求的航跡取n個點,定義為[xd(1),yd(1)],[xd(2),yd(2)],…,[xd(n),yd(n)],再將其與航跡中規(guī)定的時間t1,t2,…,tn對應(yīng)。四旋翼無人機需在tk時間點出現(xiàn)在[xd(k),yd(k)]位置上。
在t=tk時刻,定義系統(tǒng)的輸出誤差為:
式中:[x(k),y(k)]表示實際tk時刻,四旋翼無人機的實際位置;[ex(k),ey(k)]表示期望位置與實際位置的誤差。迭代學(xué)習(xí)控制的目標是讓四旋翼無人機跟蹤重復(fù)的航跡,在周期內(nèi),通過有限次數(shù)的迭代學(xué)習(xí)[9?11]最終實現(xiàn)對預(yù)期軌跡的跟蹤。基本的迭代學(xué)習(xí)控制算法流程如圖5所示。
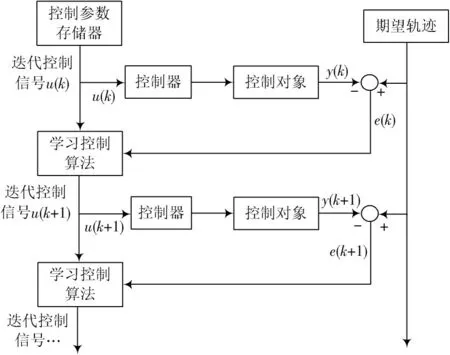
圖5 迭代學(xué)習(xí)控制算法流程
迭代學(xué)習(xí)控制算法部署在四旋翼無人機上的控制框圖如圖6 所示。
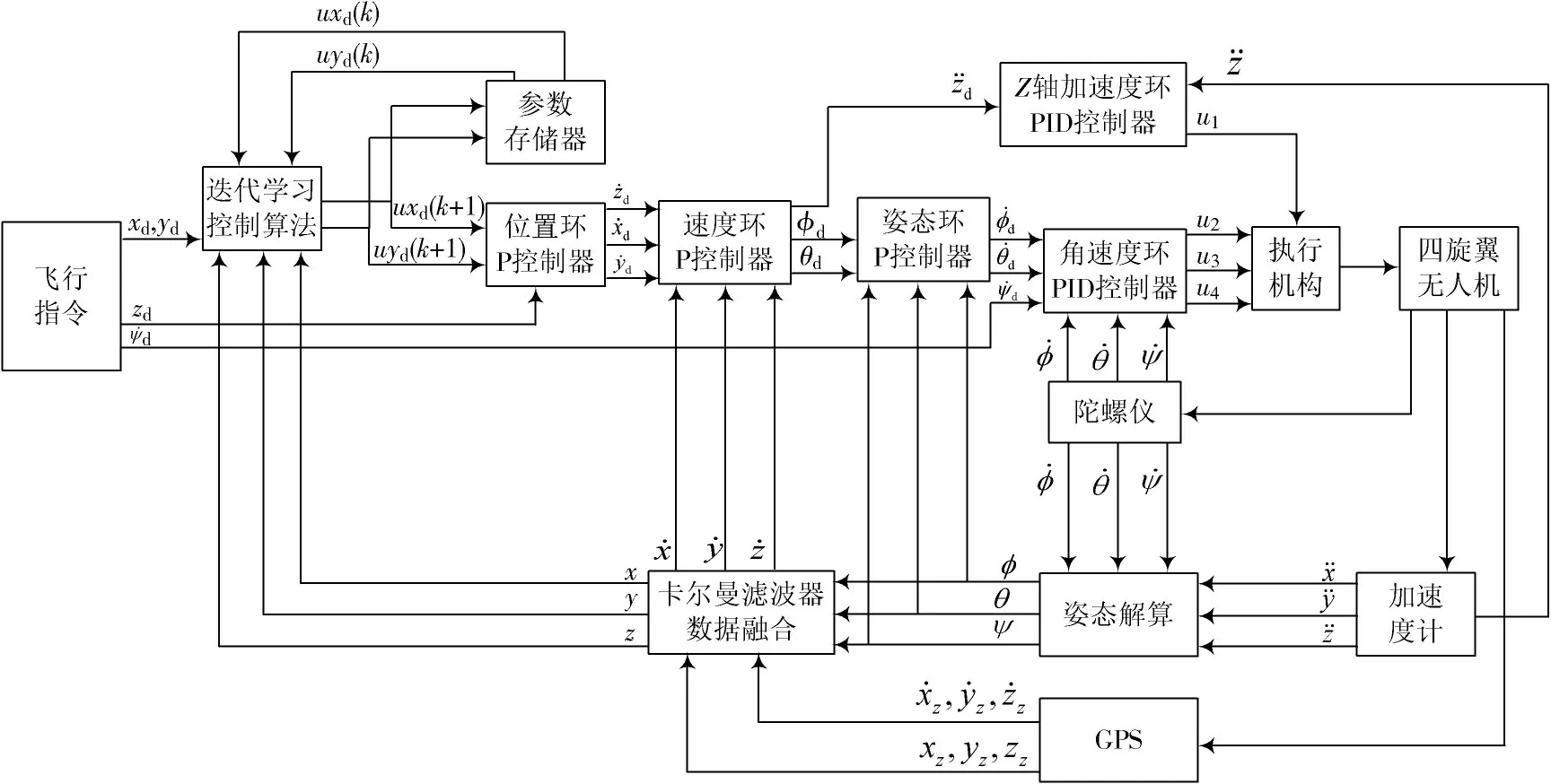
圖6 迭代學(xué)習(xí)控制部署在四旋翼無人機上的控制框圖
在現(xiàn)實飛行環(huán)境中,高機動情景下,四旋翼無人機的軌跡控制受難以建模的空氣阻力影響顯著。但是迭代學(xué)習(xí)控制算法不依賴于精確的數(shù)學(xué)模型,可以忽略上文建立的運動學(xué)模型因未建模空氣阻力所造成誤差產(chǎn)生的影響。
對于這類擾動,在迭代學(xué)習(xí)控制算法中,每次飛行周期中基本不變的外部干擾(如風(fēng)向與風(fēng)力等級等)在不斷迭代的過程中會得到合適的補償,最終起到消除偏差的作用。
3 仿真結(jié)果及分析
本實驗基于Simulink 和北京航空航天大學(xué)可靠飛行控制組研發(fā)的RflySim 無人機模擬器建立四旋翼無人機仿真平臺。在仿真平臺中,可以觀測四旋翼無人機的姿態(tài)和飛行航跡。圖7 為迭代學(xué)習(xí)控制仿真原理圖。
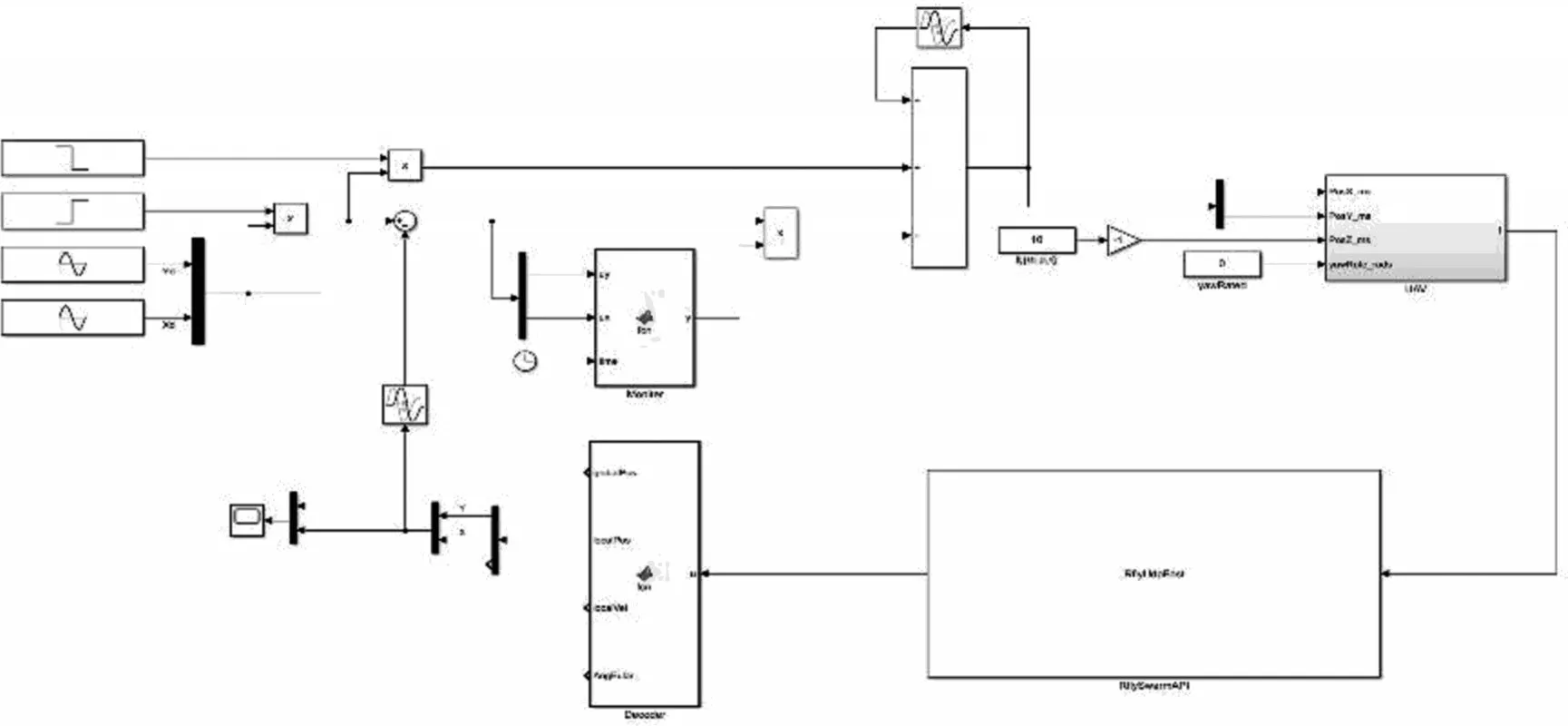
圖7 迭代學(xué)習(xí)控制仿真原理圖
干擾條件下“操場形”軌跡跟蹤的迭代學(xué)習(xí)控制效果如圖8 所示。干擾條件下,迭代學(xué)習(xí)控制器需要更多次迭代以適應(yīng)環(huán)境的干擾,最終在位置和時間上均能有效跟蹤,實現(xiàn)精準的航跡跟蹤控制。對比迭代學(xué)習(xí)控制優(yōu)化前后的控制效果,可以得出結(jié)論:經(jīng)過多次迭代學(xué)習(xí),系統(tǒng)可以快速補償外部干擾引起的誤差,最終精確地跟蹤期望航跡。

圖8 干擾條件下“操場形”軌跡跟蹤的迭代學(xué)習(xí)控制效果
4 航跡跟蹤飛行測試
測試時間為2023 年5 月7 日,天氣陰,東風(fēng)轉(zhuǎn)西北風(fēng),風(fēng)力等級3 級,實驗地點為重慶郵電大學(xué)通鼎實驗大樓南部廣場,實驗中航跡為一個直徑10 m 的圓。實驗完畢后根據(jù)飛行日志,使用日志分析工具Flight Review 可視化本次飛行數(shù)據(jù)[12],實驗結(jié)果如圖9 所示。
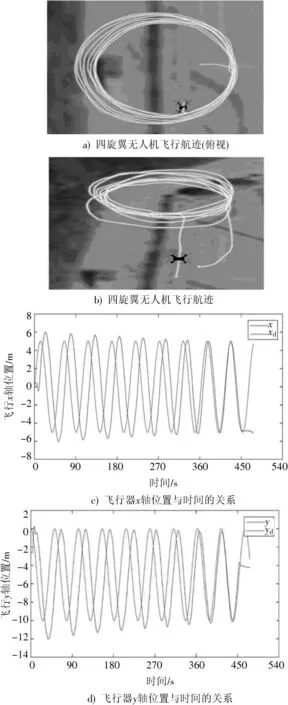
圖9 實際飛行測試效果
四旋翼無人機所受主要干擾為自西向東的風(fēng)。最外圈為串級PID 位置控制用于航跡跟蹤的控制效果,可見其受風(fēng)的干擾嚴重,偏離期望軌跡。如圖9c)和圖9d)所示,第一個航跡跟蹤周期內(nèi),位置控制上存在超調(diào),實際航跡與期望航跡存在時延。但是在迭代學(xué)習(xí)控制算法的不斷優(yōu)化下,最后一個飛行周期內(nèi),四旋翼無人機可以按照規(guī)定航跡飛行,位置上逐漸補償干擾產(chǎn)生的誤差,時間上不斷接近期望航跡的要求。
5 結(jié)語
本文以Simulink 和北京航空航天大學(xué)可靠飛行控制組研發(fā)的RflySim 無人機模擬器平臺為實驗平臺,以四旋翼無人機為研究對象,研究迭代學(xué)習(xí)控制算法,掌握算法原理。從優(yōu)化四旋翼無人機串級PID 位置控制器出發(fā),用迭代學(xué)習(xí)控制算法對環(huán)境中的干擾進行補償。通過仿真驗證算法的航跡跟蹤性能,給出四旋翼無人機圓形航跡和“操場形”航跡的跟蹤控制結(jié)果。最終進行了實際飛行測試,無人機飛行測試結(jié)果符合實驗的預(yù)期,航跡跟蹤準確,控制系統(tǒng)并未發(fā)散且能逐漸適應(yīng)外界的穩(wěn)定干擾。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55