基于實時可達域的高速飛行器分組隊形優化
2024-03-01 04:48:46李宇航白文露
宇航總體技術 2024年1期
李宇航,張 兵,姜 利,王 智,白文露
(1.北京宇航系統工程研究所,北京 100076;2.中國運載火箭技術研究院,北京 100076)
0 引言
隨著人工智能技術的快速發展,各國開始對集群協同技術提出智能化的要求[1],隊形優化作為協同智能決策的關鍵技術備受關注。隊形優化是指在飛行器集群完成相關飛行任務的過程中,為其設計合理的編隊隊形,從而提高集群的安全性、靈活性以及任務執行效率。目前有關隊形優化的研究通常是針對某一特定場景設計最優隊形[2-5]或針對某一基本隊形的隊形參數進行優化[6-7],而沒有做到“形狀級”的隊形設計,同時,研究對象多集中于低速飛行器[8]。
本文在現有研究的基礎上,考慮高速飛行器實際控制特點,對飛行器集群的編隊隊形形狀和參數同時進行優化,允許飛行器集群中各成員具有不同的飛行任務,研究分組條件下的飛行器隊形優化方法。首先,在建立高速飛行器運動模型的基礎上,利用數值計算方法構建不同初始狀態下飛行器實時可達域數據庫;其次,設計并訓練神經網絡以實現對實時可達域的快速精確預測;再次,建立適用于高速飛行器集群的編隊飛行效能指標體系及適應度函數,建立隊形優化模型并利用改進遺傳算法求解;最后,對神經網絡快速預測實時可達域、不同任務下分組隊形優化、集群成員數量變化下的動態隊形優化進行仿真分析。
1 高速飛行器實時可達域快速計算
實時可達域是指飛行器在沿預定軌跡飛行過程中,基于當前飛行狀態和相關約束,在一定時間后能夠到達的空間區域[9],如圖1所示,其與飛行器的初始狀態、運動模型和控制能力緊密相關。圖中V為飛行器速度大小,θ為飛行器彈道傾角,ψ為飛行器航跡偏角。
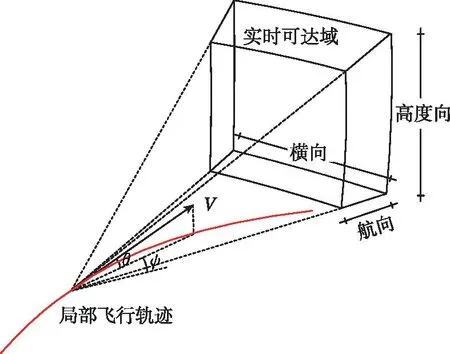
圖1 飛行器實時可達域示意圖Fig.1 Schematic diagram of real-time reachable domain of aircraft
高速飛行器設計編隊隊形時需要考慮隊形的可實現性,因此要對其可能到達的飛行邊界進行建模分析和快速計算以確定實時可達域,為編隊隊形優化提供約束條件。
1.1 飛行器運動模型
建立合理的運動模型是計算實時可達域的基礎,高速飛行器是一個復雜動力學系統,為簡化模型、提高計算速度,同時不失一般性作如下簡化:
1)將飛行器視為理想質點,作用在飛行器上的力矩在每一瞬時都處于平衡狀態;
2)符合標準大氣模型;
3)忽略地球扁率,假設地球自轉角速度恒定;
4)飛行器控制方式采用BTT轉彎模式。
定義發射坐標系坐標原點為發射點,x軸指向目的地,y軸在縱向平面內垂直于x軸,z軸與xoy平面垂直并構成右手坐標系。發射坐標系依次繞z軸、y軸旋轉θ,ψ可得到彈道坐標系oxHyHzH,如圖2所示,圖中單位無量綱處理,全文同。在發射坐標系下建立高速飛行器運動方程,見式(1)。

圖2 坐標系轉換示意圖Fig.2 Coordinate system conversion diagram
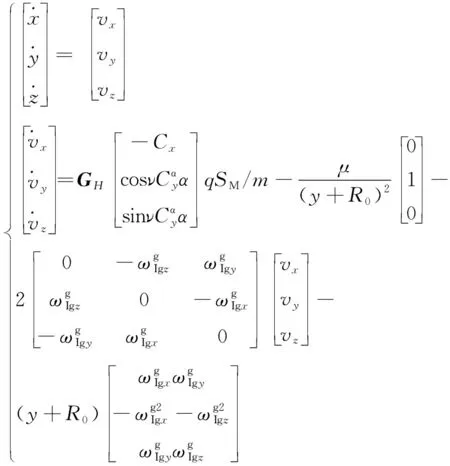
(1)

1.2 實時可達域快速計算
利用數值積分法求解實時可達域速度慢,難以直接在線進行。為了快速獲得飛行器實時可達域數據,通過大量離線仿真,獲得飛行器在不同初始狀態下的實時可達域計算結果,并建立數據庫,采用基于BP神經網絡的方法,利用數據庫訓練神經網絡,實現對飛行器實時可達域的快速預測。
1.2.1 實時可達域模型描述
考慮到高速飛行器在航向上控制難度大,隊形設計一般在橫向和高度向進行,因此實時可達域也在這兩個方向計算。實時可達域計算在飛行器發射平移坐標系olxlylzl中進行,其坐標原點位于飛行器質心,各軸方向平行于發射坐標系oxyz。
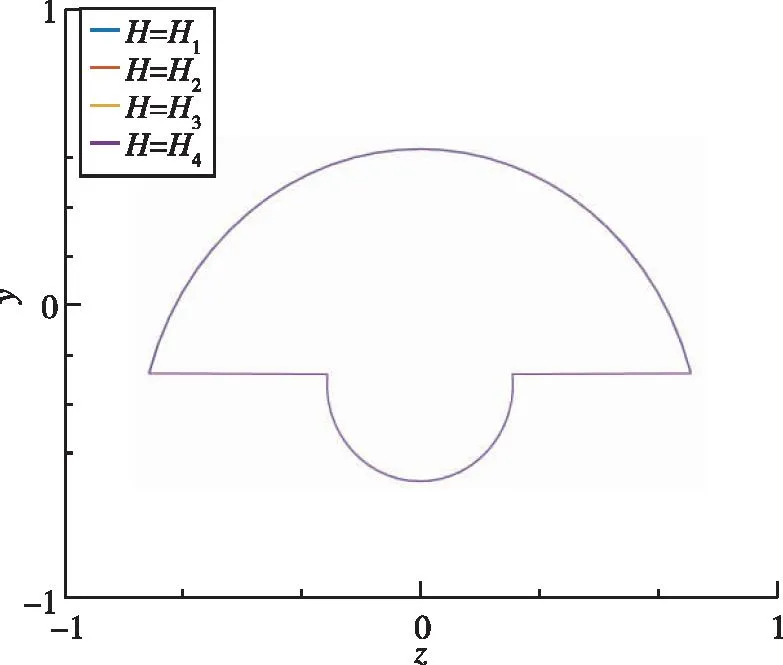
對于任意給定的飛行器初始狀態,按照一定間隔在[0,π]范圍內選取若干傾側角,分別在攻角為最大可用攻角和最小可用攻角的設定下,采用四階龍格庫塔法對飛行器軌跡進行積分,即可得到該狀態下飛行器的實時可達域信息,如圖3所示。為便于描述,對實時可達域進行簡化,將其看作是由相同圓心位置的上下兩個半徑不同的半圓拼接而成的,同時要求簡化模型能被真實實時可達域完全覆蓋,其可由圓心位置[zl0,yl0]和半徑[R,r]進行描述。

圖3 高速飛行器實時可達域及其簡化模型Fig.3 Real-time reachable domain and simplified model of high speed aircraft
1.2.2 訓練數據庫建立
通過對不同初始狀態的飛行器進行仿真計算,發現當飛行器的運動模型確定后,其實時可達域主要受初始高度、速度、彈道傾角、航跡偏角以及飛行時間等參數的影響[10]。各參數對實時可達域的影響如圖4所示。本文對上述5類參數進行組合,如圖5所示。一共針對7×4×10×7×7=13 720組數據進行仿真計算,并根據計算結果構建實時可達域數據庫。
(a)不同初始高度下實時可達域
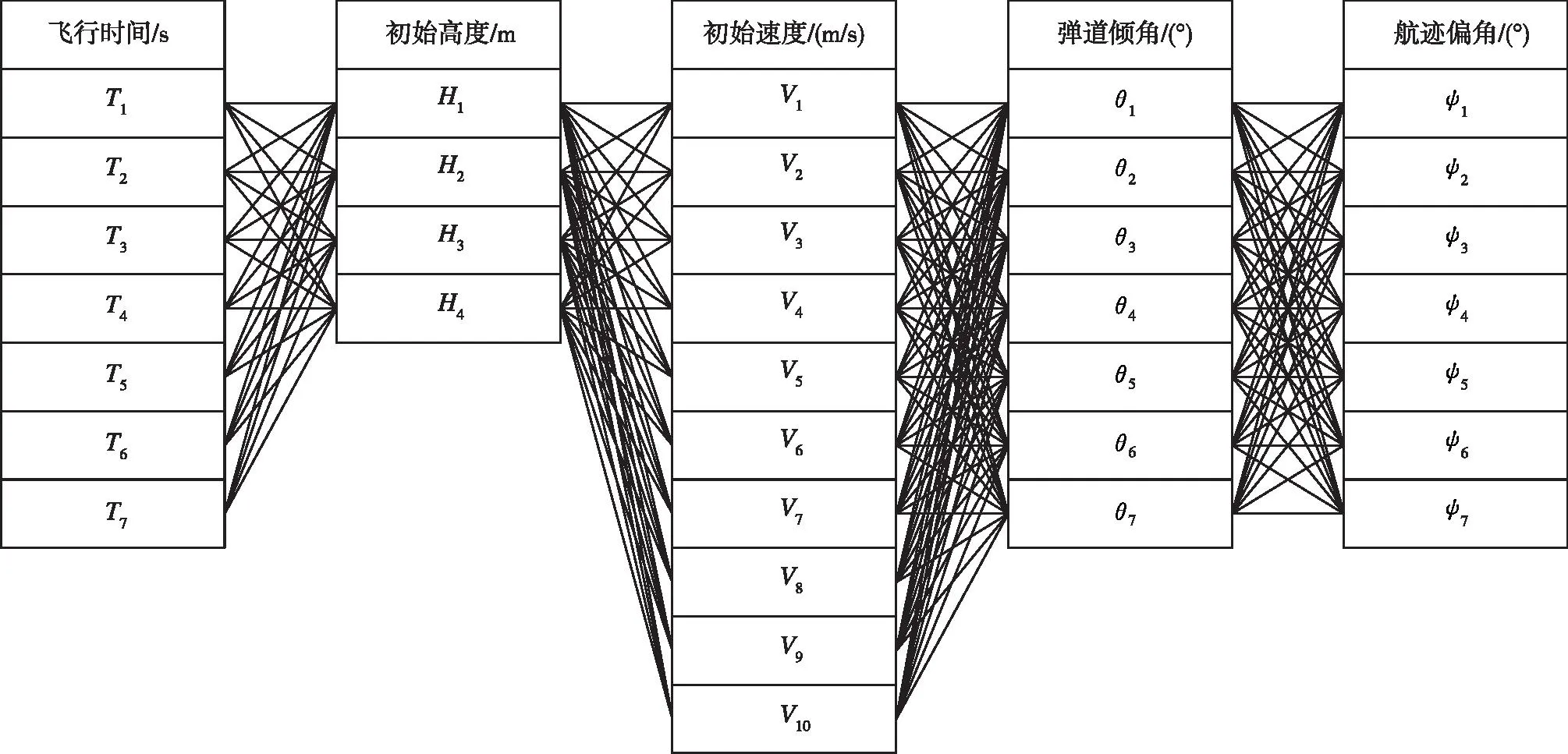
圖5 高速飛行器實時可達域數據庫的參數組合情況Fig.5 High-speed aircraft real-time reachable domain database parameters combination
1.2.3 神經網絡快速預測

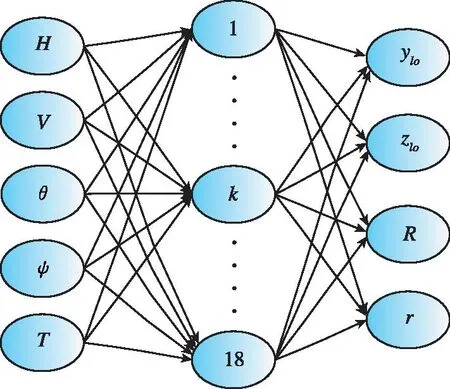
圖6 神經網絡結構示意圖Fig.6 Neural network structure
2 編隊飛行隊形優化
通常,根據所執行任務的不同,高速飛行器集群以不同隊形進行編隊飛行從而提高飛行效率。該過程涉及編隊隊形優化技術,其是指依據飛行任務、態勢和復雜約束為飛行器集群生成期望的編隊隊形和相應的隊形參數。本節將在設定編隊隊形參數的基礎上,建立高速飛行器編隊飛行效能指標體系與適應度函數,并依據改進遺傳算法進行求解,得到最優編隊飛行隊形。
2.1 編隊隊形參數
高速飛行器由于飛行速度高,對通信和規劃決策的實時性要求苛刻,通常采用主-從式控制方案[12],采用主-從式相對運動模型來描述編隊隊形。本文在主飛行器的發射平移坐標系下,以從飛行器相對于主飛行器的位置作為待優化的隊形參數,如圖7所示。
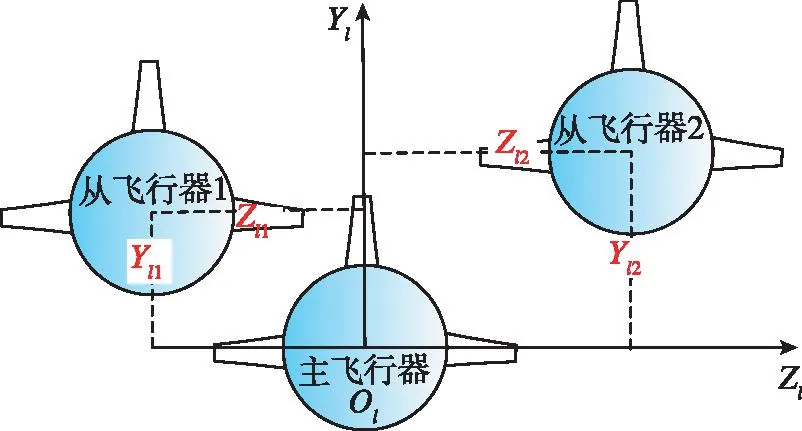
圖7 主-從式編隊隊形及隊形參數Fig.7 Master-slave formation and formation parameters
設第i個從飛行器相對主飛行器的位置為rli=[yli,zli],則整個編隊隊形可由矢量[yl1,zl1,yl2,zl2,…,yl,n-1,zl,n-1]表示,其中n為飛行器集群成員數量。由此當主飛行器在發射坐標系下的空間位置確定后,整個編隊所有成員的期望位置也將唯一確定。
2.2 隊形優化模型
2.2.1 編隊飛行效能指標體系
高速飛行器編隊飛行效能指標體系包括通過項指標、通用項指標和專用項指標,如圖8所示。其中通過項指標包括飛行邊界和飛行能力,主要衡量所設計編隊隊形能否實現,是保證飛行器集群的基本要求;通用項指標包括機動互不干擾、通信覆蓋范圍和能量消耗指標,對任何飛行任務都希望其盡可能最優;專用項指標包括編隊避障、探測范圍和探測精度等指標,飛行器集群可根據不同飛行任務選擇與之相適應的專用項指標,以提高飛行效能。
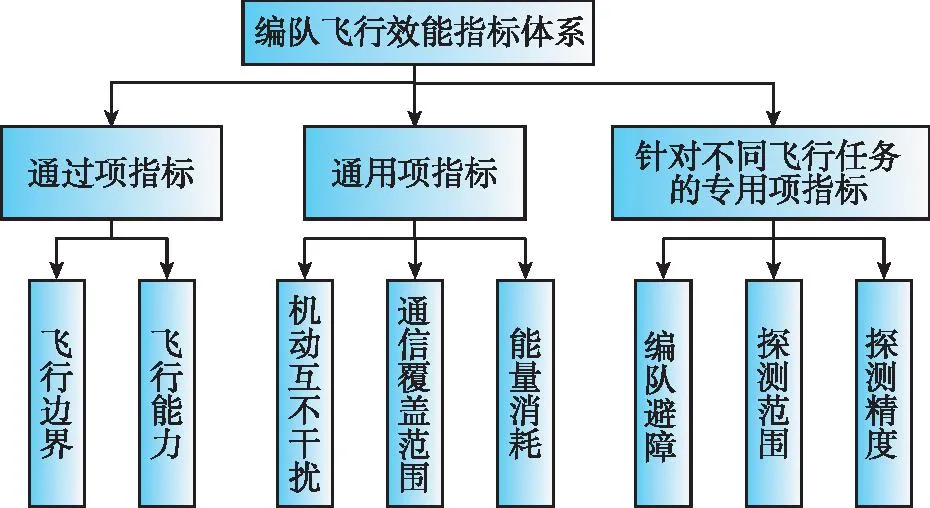
圖8 編隊飛行效能指標體系Fig.8 Formation flight efficiency system
2.2.2 適應度函數
依據編隊飛行效能指標體系建立適用于高速飛行器隊形優化的適應度函數,見式(2)。
(2)
式中,f為加權處理后的適應度函數;f1,f2分別為飛行邊界和飛行能力指標的適應度函數;ωi為指標體系中第i個指標的權重;fi為第i個指標的適應度函數;NI為指標個數。
(1)飛行邊界
飛行邊界是指各從飛行器允許偏離主飛行器位置的最大值,其由無線數據鏈傳輸性能以及飛行器機動能力綜合確定,是保證各飛行器編隊飛行的基本要求。本文以主飛行器為中心,建立矩形包絡Ω1,如圖9所示,所有從飛行器在該包絡內即可滿足飛行邊界指標要求。
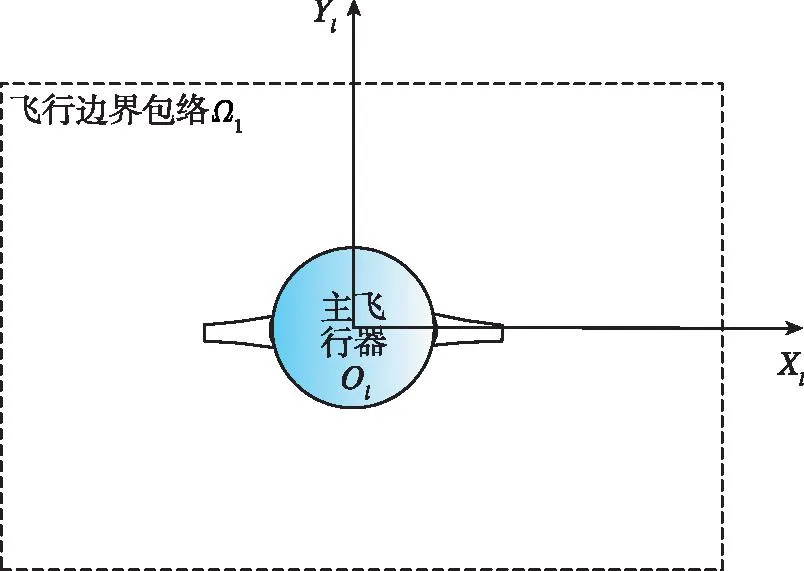
圖9 飛行邊界示意圖Fig.9 Flight boundary diagram
考慮到飛行邊界指標的重要性,將其設定為通過項指標。設計適應度函數
(3)
式中,Pj表示第j個飛行器的位置。
(2)飛行能力
飛行能力指標與飛行邊界指標類似,是衡量編隊隊形能否實現的重要指標。不同于低速飛行器,高速飛行器可到達的空間區域受自身能力的限制較強,需利用飛行器實時可達域Ω2表征各飛行器的飛行能力,要求所設計編隊隊形應使各成員期望編隊位置在其實時可達域內。將其設定為通過項指標。設計適應度函數
(4)
(3)機動互不干擾
機動互不干擾指標表征當飛行器集群機動飛行時,各成員間避免發生氣動干擾甚至碰撞的能力。顯然,在不考慮其他影響時,間距越大,飛行器集群的機動互不干擾能力越強,因此采用相鄰編隊成員間距離來衡量該項能力。將其設定為通用項指標。設計適應度函數
(5)
式中,f3j為第j個飛行器滿足機動互不干擾指標的適應度函數,dis0為飛行器間安全間距,disj為第j個飛行器和第j+1個飛行器之間的距離。
(4)通信覆蓋范圍


(6)
式中,f4j為第j個飛行器滿足通信覆蓋范圍指標的適應度函數;ξ0為最小離軸角;ξj為第j個飛行器相對主飛行器離軸角;k1為放大因子,通常取1.2~1.5。
能量消耗指標表征各飛行器飛向期望編隊位置所消耗的能量多少。本文利用各飛行器期望編隊位置與相同時間內其無控飛行到達的位置之差來衡量能量消耗。能量消耗指標是多飛行器集群編隊飛行普遍適用的指標,設定其為通用項指標。設計適應度函數
(7)
式中,rzj,ryj分別表示第j個飛行器期望編隊位置與無控飛行到達的位置之差在橫向和高度向的分量;權重系數k2,k3根據控制能力確定,且滿足k2+k3=1;rj為飛行器j實時可達域簡化模型中下半圓的半徑。
(6)編隊避障
編隊避障指標表征飛行器集群躲避障礙物減少損毀的能力。通常,根據障礙物距離、形式,為飛行器集群設定合適的期望間距,可有效減少飛行器集群的避障難度。設定其為專用項指標。設計適應度函數
(8)
式中,φ0為避障任務參考角,disMT為編隊生成時刻主飛行器和障礙物之間的距離,disj,k為第j和第k行器之間的距離。
(7)探測范圍
探測范圍衡量飛行器集群能夠探測到的空間區域大小,在各飛行器探測能力確定的情況下,希望集群更加分散。探測范圍適用于執行探測任務的飛行器集群,設定其為專用項指標。設計適應度函數
術中發現有清亮的腦脊液溢出時,說明硬脊膜已經破損,應積極進行修補[17]。有多種硬脊膜損傷的修補方法,直接縫合法、筋膜或肌瓣包繞或補片式修復法、后側筋膜嚴密縫合法[18]、生物蛋白膠-明膠海綿復合物修復法[19]。筆者認為不同的硬脊膜破損的分度應采取不同的治療措施。
(9)
式中,ymin,ymax分別為集群成員在高度向的最小值和最大值;zmin,zmax分別為集群成員在橫向的最小值和最大值;yΩ1,zΩ1分別為由飛行邊界確定的高度向和橫向范圍。
(8)探測精度
探測精度衡量飛行器集群對目標的探測定位精度,在各飛行器探測能力確定的情況下,融合多個來自不同方向的探測數據可有效提高探測精度[13]。設定其為專用項指標。設計適應度函數
f8=1/(q11+q22+q33+q44)
(10)
式中,xjM,yjM,zjM分別為目標相對于第j個飛行器在航向、高度向和橫向上的距離;q11,q22,q33,q44分別為矩陣Q的對角線元素。
2.3 隊形優化算法
直接利用傳統遺傳算法求解隊形優化問題收斂速度慢且易陷入局部最優,本文為其加入啟發式信息和隨機因子克服上述問題。在種群生成之初,依據相關指標啟發式指導初始種群的生成。初始種群中任意一個個體的生成過程如下。
1)對于第一個飛行器,在其飛行邊界Ω1和實時可達域Ω2內,以無控飛行所能到達的位置為期望位置,按照二維正態概率分布隨機生成第一架飛行器的初始位置;
2)對于之后的飛行器,在其飛行邊界Ω1和實時可達域Ω2內,同時考慮和前一飛行器機動互不干擾的距離要求,以無控飛行所能到達的位置為期望位置,按照二維正態概率分布隨機生成初始位置;
3)將第一架飛行器和最后一架飛行器的橫向位置之和作為扣除項,將所有飛行器橫向位置與之作差,結果作為各成員新的初始位置;
4)對飛行器集群各成員位置進行編碼形成個體片段,并將其串聯起來作為種群中的一個個體individuali。
將預設數量的初始個體組合得到初始種群后,按照圖10改進遺傳算法流程進行迭代求解。
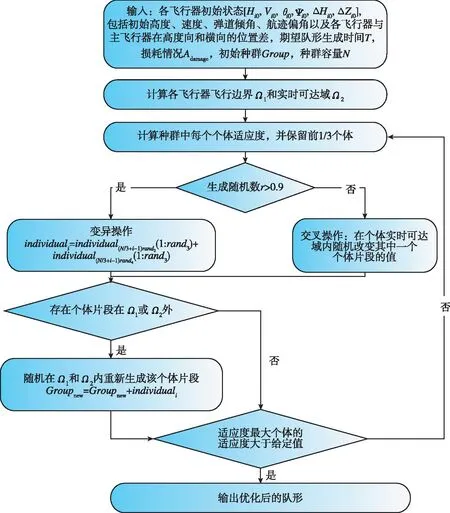
圖10 改進遺傳算法求解編隊飛行隊形優化流程圖Fig.10 Improved genetic algorithm for formation flight formation optimization flow chart
3 仿真驗證
3.1 實時可達域快速預測結果
針對圖5所示參數組合建立的實時可達域數據庫,隨機選取訓練樣本數量13 500,測試樣本220,設定學習率為0.002,離線訓練次數為1 000次。對圖6所示神經網絡訓練結果見表1、圖11和圖12。

表1 數值計算與神經網絡方法時間對比Tab.1 Time comparison between numerical calculation and neural network method
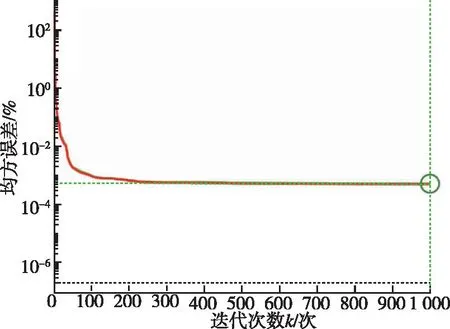
圖11 神經網絡預測誤差隨訓練次數變化曲線Fig.11 Neural network prediction error curves with training times
通過表1可以看出利用神經網絡可大大提高實時可達域預測速度,從而保證隊形的在線優化。從圖11和圖12可以看到神經網絡對實時可達域簡化模型4個描述參數的預測誤差不大于0.5%。由于實時可達域簡化模型被真實實時可達域完全覆蓋,在應用神經網絡預測結果時,可首先對其進行放縮,保證其在真實實時可達域內,提高隊形優化模型輸出結果的可靠性。
3.2 高速飛行器分組動態隊形優化結果
3.2.1 不同任務下的分組隊形優化
將高速飛行器集群分為若干執行不同任務的小組,分別為各組飛行器設置不同的任務,見表2。各項任務均需滿足通過項指標及通用項指標,特別地,其中編隊避障任務還需滿足協同避撞指標,精確到達還需滿足探測范圍指標,精確探測還需滿足探測精度指標。設置飛行時間為16 s,隨機設置各飛行器初始狀態,歸一化優化結果見圖13。
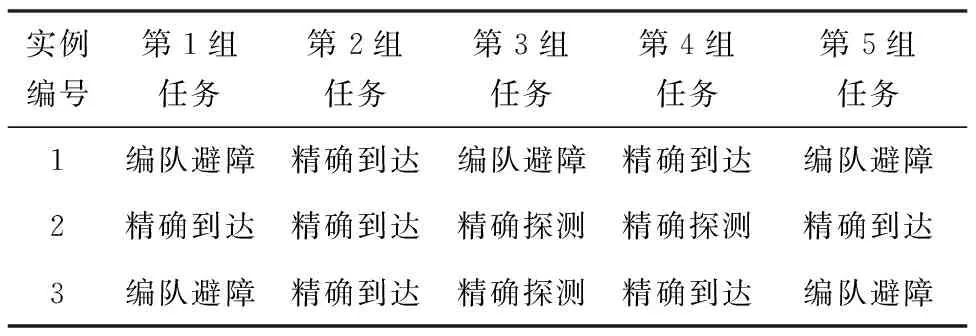
表2 飛行器集群各分組任務情況Tab.2 The task of each group of aircraft cluster
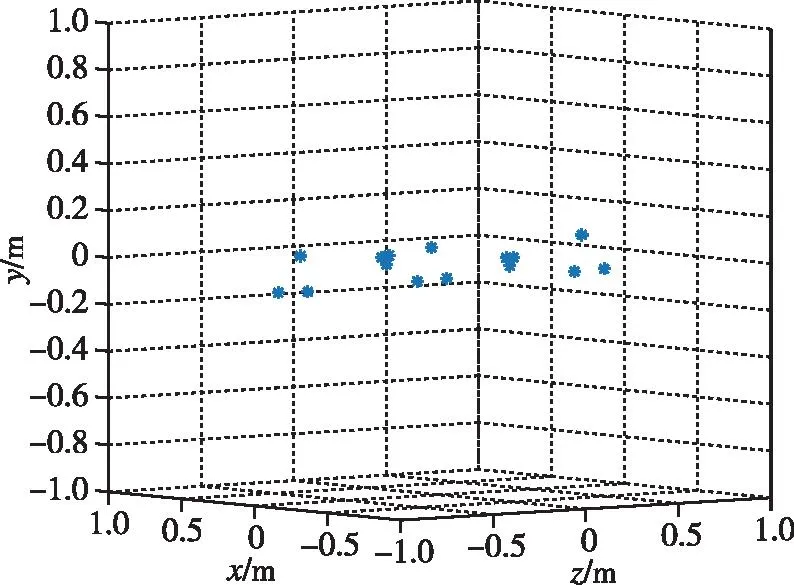
(a)實例1情況
3.2.2 分組動態隊形優化
在飛行過程中,當部分飛行器發生故障或損耗時,需要動態調整隊形。以實例1為例,考慮第3個分組中第1個和第2個飛行器發生故障時,其新隊形見圖14。可以看到當某個分組只剩1個飛行器后,會并入臨近的分組,并配合臨近分組執行其任務。
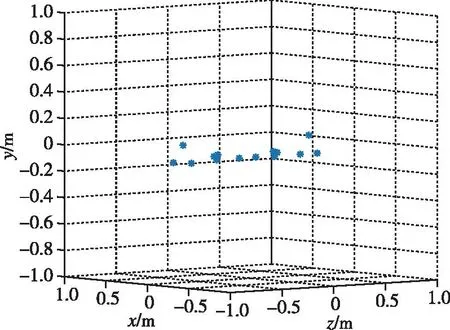
(a)第3個分組中1個飛行器故障
4 結束語
本文提出基于實時可達域的高速飛行器分組動態隊形優化方法。仿真結果表明利用神經網絡預測實時可達域大大提高了可達域計算速度,同時具有較高預測精度。利用改進遺傳算法可對隊形形狀和參數同時進行優化,同時可以快速解決分組隊形優化這一多目標多約束問題,使各個分組更好地執行其各自飛行任務。并入臨近分組的原則可有效解決當部分飛行器發生故障或被擊毀時的隊形重構問題,研究成果具有重要的應用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03