多模態融合室內智能導航系統
2024-03-04 18:03:40陳福陸魏曉巍韓立偉何淑慶
科技風 2024年5期
陳福陸 魏曉巍 韓立偉 何淑慶
摘?要:如今,盡管室外導航系統采用GPS技術具有精度高、范圍廣等優點,但是室內定位卻受到墻體、障礙物等影響,導致定位精度下降。其中,精度低和資源開銷高是最普遍的共性問題。本文采用3D渲染技術、Rline算法、傳感器信息收集等技術構建多模態融合室內智能導航系統,能夠更好地管理定位系統和設備之間的通信,從而進一步提高定位精度和效率。
關鍵詞:室內定位;精度;資源開銷
中圖分類號:TP311.52??文獻標識碼:A
室內定位技術隨著科技的不斷發展而同步提升,其商業和使用價值越來越受到人們的重視。它可以用于多種基于位置的服務,如室內導航、室內定位、室內廣告投放等。隨著人們對室內定位技術的需求不斷增加,室內定位技術的市場規模也在不斷擴大。據研究報告顯示,2021年我國室內定位行業需求量達到15593套,較2020年增長11.0%。預測整個室內定位將具有與GPS相當的市場規模,即100億美元。這表明,室內定位技術已成為一個具有巨大商業和使用價值的科技發展。
盡管室內定位技術面臨著許多挑戰和限制,如信號干擾、建筑物遮擋等問題[1]?,但研究人員努力開發出了新的技術和算法,以提高精度和穩定性,并為室內定位技術的廣泛應用打下堅實的基礎。未來,隨著室內定位技術的不斷發展和完善,相信它將為人們的生活帶來更多的便利和幫助[2]?。
1?國內外相關研究
室內定位技術是現代智能化建筑中不可或缺的一部分。它可以通過使用無線信號或傳感器等技術來確定人或物體的位置信息,從而實現室內導航、監控和智能家居等應用。室內定位技術的應用前景廣闊,可以應用于醫院、商場等領域,提高服務效率和質量,具有重要意義[3]?。然而,由于紅外線技術的局限性,如易受光線干擾和穿透性差等問題,室內定位技術的應用受到了限制。為了解決這些問題,百度等公司也相繼推出了自己的室內定位系統[4]?。iBeacon技術是一種基于藍牙低功耗技術的室內定位系統,可以實現高精度的定位。而在我國,啟動了“羲和”計劃,該計劃的目標是開發出一種高精度、高可靠性的室內定位系統,以滿足人們對室內定位技術的需求[5]?。該系統將采用多種技術,如藍牙低功耗、WiFi、慣性導航等,以實現高精度的定位[6]?。
2?研究內容
室內定位導航系統是多年來受到廣泛關注的一個領域,隨著智能手機和移動設備的普及,人們對室內定位導航系統的需求越來越迫切。傳統的單一技術室內定位系統難以滿足人們的需求[7]?,因此,本文提出了一種基于移動設備傳感器的信息收集系統、多數據融合的方向測量方法和基于三維信息空間的定位方法相結合的室內定位導航系統,以提高定位精度和準確度。該系統采用了多種技術和大型開放地圖OpenStreetMap,可以獲取更加準確的地理位置信息[8]?。其中,基于移動設備傳感器的信息收集系統是該系統的核心技術之一。該系統可以通過手機的加速度計、陀螺儀、磁力計等傳感器獲取用戶的行走、轉向、轉彎等行為信息,并將這些信息進行處理,從而實現用戶的室內定位。此外,該系統還采用了多數據融合的方向測量方法,該方法可以將不同傳感器獲取的數據進行融合,從而提高定位的準確度和穩定性。通過多數據融合,可以消除單一傳感器的誤差,從而提高定位的準確度和穩定性。最后,該系統還使用了基于三維信息空間的定位方法,實現更加準確的定位信息。該方法通過將室內建筑的三維信息與用戶的行為信息進行融合,可以實現更加準確的定位信息。通過基于三維信息空間的定位方法,可以克服傳統定位方法中存在的誤差和不確定性,從而提高定位的準確度和精度[9]?。
2.1?三維信息的收集與存儲
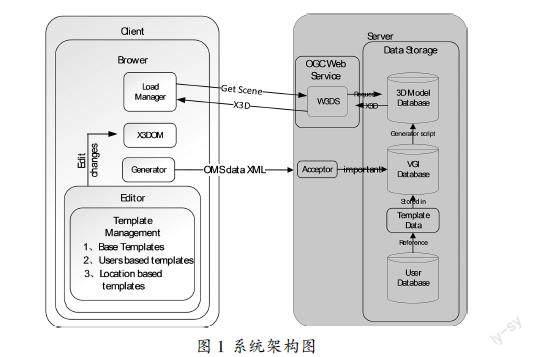
隨著Web技術的不斷發展,Web3D渲染技術已經成為實現3D模型渲染的一種重要方式。Web3D技術可以將3D模型呈現在瀏覽器中,使得用戶可以在不需要安裝任何插件的情況下直接查看和交互3D模型。這種技術的發展也為各種應用場景帶來了更多的可能性。在Web3D渲染技術中,基于模板的三維信息表達方式是一種常用的方式。這種方式可以實現對現有數據的兼容,對三維細節信息的擴展,以及對數據存儲的優化。基于模板的三維信息表達方式可以將3D模型分解為一系列的基本單元,然后使用模板來描述這些基本單元的形狀和屬性。這種方式可以大大減少數據的存儲空間,并且可以實現快速的模型檢索和編輯。隨著5G技術的高速發展,移動端3D渲染技術也可以在5G技術的支持下滿足室內定位時反復渲染場景的需求。5G技術的高速傳輸和低延遲特性可以保證3D模型的實時渲染和交互,從而為室內定位和導航等應用場景提供更好的用戶體驗。
在基于模板的三維信息表達方式中,空間局部性和重復性是實現快速存儲與檢索的關鍵。通過對模型進行分割和分類,可以將模型分解為一系列的基本單元,并且對這些基本單元進行編碼和存儲。這樣可以大大減少數據的存儲空間,并且可以實現快速的模型檢索和編輯。在服務器端和客戶端之間建立聯系也是實現數據可視化、模型編輯以及數據生成的關鍵。通過建立服務器端和客戶端之間的通信機制,可以實現數據的實時傳輸和交互。這樣可以為用戶提供更好的用戶體驗,并且可以實現更高效的數據處理和管理。
Web3D渲染技術在瀏覽器上實現3D模型渲染的方式已經成為一種重要的技術。隨著5G技術的高速發展,移動端3D渲染技術也可以在5G技術的支持下滿足室內定位時反復渲染場景的需求。通過利用空間局部性和重復性來構建大量的模板信息,可以實現快速存儲與檢索,并在服務器端和客戶端建立聯系以實現數據可視化、模型編輯以及數據生成。
2.2?實時消失點檢測與方向測量
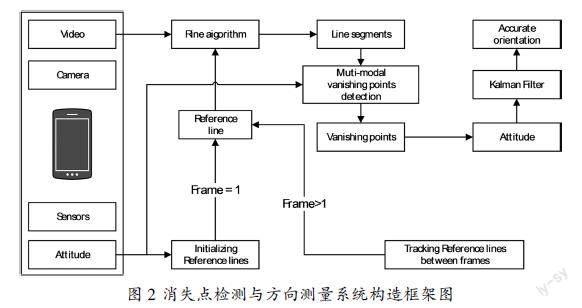
隨著智能手機的普及,人們已經可以使用手機進行室內導航。但是,由于室內電磁環境的影響,導航的精度可能會受到一定程度的影響。因此,計算機視覺中的消失點方向測量方法成為一種可行的選擇,因為它可以提供更高的精度。然而,消失點方向測量方法在移動端需要大量的計算資源。為了解決這個問題,研究人員提出了一種名為Rline線段檢測方法的算法。該算法通過檢測與預設直線相交的線段來減少計算量和資源開銷。此外,通過卡爾曼濾波來過濾方向信息,可以進一步提高檢測精度,實現低資源開銷、部署成本低的實時消失點檢測與方向測量。
Rline線段檢測方法的優點在于它可以在低資源開銷的情況下提供高精度的線段檢測。這意味著它可以在移動設備上實現,并且可以在實時環境中進行消失點檢測和方向測量。此外,該算法的部署成本也比較低,因為它不需要太多的硬件資源和專業知識,并且隨著智能手機的不斷普及,室內導航已經成為一種非常普遍的需求。而Rline線段檢測方法可以提供一種低資源開銷、高精度的消失點檢測和方向測量方法,從而為室內導航提供更好的支持。
圖2?消失點檢測與方向測量系統構造框架圖
2.3?基于三維信息的室內定位系統
3DLoc是一種基于移動設備傳感器和圖像數據實現室內定位的方法。它是一種新興的技術,通過抓取三維目標并結合圖像數據實現消失點多模態檢測,計算消失點位置,再通過消失點估算目標邊緣并檢測目標,最后生成多個潛在位置篩選出正確位置。這種方法可以自動實現定位和方向信息,適用于移動端的應用需求。它可以在室內環境中實現高精度的定位和方向信息,而且不需要額外的硬件設備,只需要使用移動設備的傳感器和攝像頭即可。這使得3DLoc成為一種非常實用的技術,可以廣泛應用于各種移動應用程序中,例如室內導航、虛擬現實游戲、室內定位等。
3DLoc的實現需要使用多種技術,包括計算機視覺、圖像處理、機器學習、傳感器技術等。它需要對圖像進行分析和處理,提取出圖像中的消失點和目標邊緣,然后使用機器學習算法進行分類和識別,最后生成多個潛在位置,篩選出正確的位置。這些技術的應用使得3DLoc能夠實現高精度和高效率的定位和方向信息。
2.4?多信息融合的室內定位系統與應用
室內定位技術的需求不斷增加,隨著物聯網和智能家居的發展,人們對于室內定位技術的精度和實時性要求也越來越高。然而,傳統的室內定位技術如WiFi定位、藍牙定位等存在著信息丟失、遮擋和實時性差等問題,無法滿足人們的需求。
為了解決這些問題,本文提出了一種采用融合內置傳感器和三維信息的定位方法。該方法分為三個階段,首先基于3DLoc計算潛在位置生成粒子,然后通過傳感器估計用戶位置,并用粒子濾波器跟蹤和約束,最后利用3DLoc計算潛在位置對用戶運動軌跡進行矯正,實現更精準的室內定位。具體來說,先利用3DLoc技術計算出用戶的潛在位置,然后根據這個位置生成一些粒子。這些粒子代表了用戶可能所在的位置,數量越多,定位精度越高。接下來,通過內置傳感器(如加速度計、陀螺儀、磁力計等)獲取用戶的實時位置信息,并利用粒子濾波器對其進行跟蹤和約束。粒子濾波器是一種基于貝葉斯濾波的算法,可以根據傳感器信息和潛在位置粒子的權重來估計用戶的位置,從而實現更精準的定位。最后,在用戶移動過程中,由于3DLoc技術存在一定的誤差,可能會導致用戶的運動軌跡出現偏差。為了解決這個問題,可以利用3DLoc技術再次計算出用戶的潛在位置,并對用戶的運動軌跡進行矯正,從而實現更精準的室內定位。
總的來說,采用融合內置傳感器和三維信息的定位方法可以提高定位精度并減少時間開銷,適合移動端使用。這種方法可以廣泛應用于智能家居、智能辦公室、醫院、商場等場景,為人們提供更加智能和便捷的服務。
3?結論
多模態室內定位導航系統是一種基于多種傳感器和技術的室內導航系統,可以幫助用戶在室內環境中準確地定位和導航。在該系統中,三維信息的收集和存儲是非常關鍵的,因為它提供了室內環境的準確和詳細的表示。同時,實時消失點檢測和方向測量也是重要的技術,可以幫助系統更準確地感知用戶的位置和方向。
另外,該系統還使用了室內定位技術來確定室內信息和用戶軌跡,這可以幫助系統更好地理解用戶的行為和需求。此外,該系統還融合了內置傳感器和三維信息的定位方法,以優化精度和降低開銷。這種方法可以提高系統的可靠性和實用性,使用戶能夠更輕松地在室內環境中進行導航。
最后,多模態室內定位導航系統的實現使用多種技術和傳感器的協同作用,以提供準確和實用的室內導航體驗。該系統可以廣泛應用于商業、醫療、教育等領域,為用戶提供更好的室內導航服務。
參考文獻:
[1]牛建偉,齊之平,呂衛鋒,等.基于多信息融合的室內定位系統[J].物聯網學報,2017,1(01):5566.
[2]龔峰,宋熠.室內定位技術研究[J].軟件,2016,37(04):812.
[3]彭業順,李嘉玲,徐振飛,等.藍牙室內定位技術綜述及展望[J].日用電器,2021,192(12):5864.
[4]陳獻,王貴鑫.室內定位技術發展及應用研究[J].科學技術創新,2019(17):8385.
[5]趙雨境.基于藍牙技術的室內定位系統設計[J].物聯網技術,2020,10(01):5155.
[6]趙旋旋,韓李濤,鄭瑩,等.室內導航模型研究綜述[J].軟件導刊,2016,15(05):13.
[7]薛偉蓮,趙娣,張穎超.室內定位研究綜述[J].計算機與現代化,2020,297(05):8088.
[8]黃增士.基于三維信息的室內定位導航系統研究與應用[D].中國科學技術大學,2018.
[9]黃家豪.基于多模態的空間定位系統研究與實現[D].浙江工業大學,2019.
基金項目:本文為2022年山東省大學生創新創業訓練計劃項目(877)研究成果之一;臨沂大學2022年創新創業校級重點項目(51822303)研究成果之一
作者簡介:陳福陸(2001—?),男,山東濟寧人,本科在讀,研究方向:計算機軟件開發;魏曉巍(1995—?),男,山東臨沂人,研究生在讀,研究方向:深度學習;韓立偉(2002—?),男,山東濰坊人,本科在讀,研究方向:計算機軟件開發。
*通訊作者:何淑慶,男,山東臨沂人,博士研究生,講師,研究方向:服務計算、流數據處理、搜索引擎。