廣播星歷旋轉(zhuǎn)誤差對低軌星載BDS-3/GPS實時精密定軌影響分析
2024-03-05 12:18:36王煜斌李文文蔣科材趙齊樂
導(dǎo)航定位與授時 2024年1期
李 敏, 王煜斌, 李文文,2, 蔣科材, 陳 國, 趙齊樂
(1.武漢大學(xué)衛(wèi)星導(dǎo)航定位技術(shù)研究中心,武漢 430079;2.香港理工大學(xué)土地測量與地理資訊學(xué)系, 香港)
0 引言
隨著低軌衛(wèi)星在大氣掩星觀測、地形形變監(jiān)測及低軌導(dǎo)航增強等領(lǐng)域的應(yīng)用,其對在軌軌道處理的精度和時效性要求越來越高;另外,低軌衛(wèi)星的自主運行同樣需要低延時甚至實時的衛(wèi)星位置及速度信息[1-3]。星載GNSS (global navigation sate-llite system)技術(shù)具備觀測精度高、全球覆蓋廣及成本低等優(yōu)勢,在低軌衛(wèi)星的實時軌道確定方面得到了大量的研究和應(yīng)用。
GNSS廣播星歷能夠在不依賴地面的情況下實時更新,可充分滿足星載GNSS實時定軌對實時性與自主性的要求,因此被廣泛應(yīng)用。廣播星歷誤差是限制星載GNSS實時精密定軌精度的主要因素。通常采用空間信號測距誤差(signal in space ranging error, SISRE)[4]來描述廣播星歷中的軌道和鐘差誤差的綜合影響。Galileo衛(wèi)星由于使用了具有高穩(wěn)定度的原子鐘且更新間隔僅10 min,其SISRE可達0.3 m 以內(nèi),是目前所有 GNSS 星座中精度最高的[4-5]。得益于國產(chǎn)高穩(wěn)星載原子鐘和星間鏈路技術(shù)的應(yīng)用,北斗三號廣播星歷中地球軌道(medium Earth orbit, MEO)衛(wèi)星軌道均方根(root mean square, RMS)誤差和鐘差標準差分別達到0.5 m和1.8 ns,其SISRE對應(yīng)在 0.5 m水平,僅為北斗二代衛(wèi)星的一半[6-9]。GPS的SISRE 在0.7 m 水平,分別是BDS-3和Galileo衛(wèi)星的1.4倍和2.3倍。
為了提高實時定軌精度,Montenbruck等[10]最早提出將相位模糊度參數(shù)化為隨機游走過程以吸收廣播星歷SISRE,Gunning等[11]則提出在實時定軌直接基于偽距和相位觀測值估計GNSS星歷SISRE。考慮到偽距觀測的權(quán)重通常較小,這兩種方法基本等價。GRACE和Swarm多顆低軌衛(wèi)星在軌實測GPS數(shù)據(jù)的解算結(jié)果顯示,該方法的三維定軌RMS誤差能分別達到0.5 m和0.28 m水平[10,12-13]。基于該方法,國產(chǎn)資源三號、海洋二號衛(wèi)星的實時定軌精度也從0.8~0.9 m提升至0.3~0.5 m量級[14-16]。另一方面,得益于更優(yōu)的 SISRE 性能,利用 Galileo 和 BDS-3 可以顯著提高實時定軌精度。以Sentinel-6A衛(wèi)星為代表的星載Galileo實時定軌精度可以達到0.1m量級[17],而國產(chǎn)HY2D衛(wèi)星基于BDS-3新頻點信號B1C/B2a觀測值也實現(xiàn)了0.2 m量級的實時定軌精度[18]。
然而,由于使用的地球定向參數(shù)(Earth orientation parameter, EOP)誤差、動力學(xué)模型誤差以及參與解算的地面站分布不均勻等因素,GNSS廣播星歷軌道存在著顯著的星座整體平移、旋轉(zhuǎn)和尺度誤差。對于北斗系統(tǒng)廣播星歷,其尺度誤差較小可以忽略,平移誤差主要在Z方向并可以通過經(jīng)驗擬合較好地修正。廣播星歷旋轉(zhuǎn)性誤差主要是受到EOP誤差的影響。北斗系統(tǒng)由于EOP更新較慢,其旋轉(zhuǎn)誤差最為突出,其RMS在X,Y,Z方向甚至達到2.0 mas量級[19]。廣播星歷整體旋轉(zhuǎn)誤差一方面影響GNSS軌道精度,通過改正旋轉(zhuǎn)誤差后BDS-3 傾斜地球同步軌道(inclined geostationary satellite orbit, IGSO)衛(wèi)星的廣播軌道RMS誤差水平由0.7 m提升至 0.4~0.5 m,MEO由0.43 m提升至0.2 ~0.3 m[19-20];而另一方面,由于不同系統(tǒng)的星歷旋轉(zhuǎn)誤差并不一致,多系統(tǒng)聯(lián)合時旋轉(zhuǎn)差異難以參數(shù)化吸收。利用BDS-3廣播星歷進行精密單點定位(precise point positioning, PPP)時,旋轉(zhuǎn)性誤差對定位結(jié)果的影響甚至達到10 cm[20-21]。
現(xiàn)有的基于星載GNSS的實時定軌并未充分顧及到廣播星歷中的整體旋轉(zhuǎn)誤差的影響。陸地探測一號(LUTAN-01)是中國資源衛(wèi)星數(shù)據(jù)應(yīng)用中心研制的L波段合成孔徑雷達(synthetic aper-ture radar, SAR)衛(wèi)星星座,用于監(jiān)測地質(zhì)環(huán)境、滑坡和地震災(zāi)害。LUTAN-01星座由兩顆低軌衛(wèi)星組成。其中,LUTAN-01A(LT-01A)衛(wèi)星于2022年1月26日發(fā)射,其攜帶的GNSS 接收器和天線可以同時跟蹤機載 GPS 和 BDS-3 信號。本文收集了2023年1月10日~2月4日期間LT-01A衛(wèi)星的星載GPS與BDS-3觀測數(shù)據(jù),基于自主開發(fā)的星載GNSS實時定軌軟件,分析廣播星歷旋轉(zhuǎn)誤差對基于BDS-3/GPS的低軌星載GNSS實時定軌的影響。
1 方法與數(shù)據(jù)
1.1 實時精密定軌模型方法
為了消除電離層延遲的影響,本文使用無電離層延遲組合觀測值作為實時定軌的幾何模型,如式(1)所示。
(1)

本文使用簡化動力學(xué)方法進行低軌衛(wèi)星實時定軌,該方法在動力學(xué)模型中添加經(jīng)驗加速度吸收衛(wèi)星動力學(xué)模型誤差,不易受動力學(xué)模型誤差和幾何測量誤差的影響[22]。若星載GNSS觀測值出現(xiàn)中斷或質(zhì)量過差,可利用軌道積分預(yù)報軌道,具有較高的穩(wěn)定性[23]。為了更好地滿足星載平臺對計算效率、空間占用及數(shù)值穩(wěn)健性等指標的要求,實時定軌軟件采用平方根信息濾波(square root information filter, SRIF)[24]進行參數(shù)估計。低軌衛(wèi)星動力學(xué)軌道通過軌道狀態(tài)矢量表征。因此,濾波器中所有待估參數(shù)的狀態(tài)矢量可表示為

(2)

將上述無電離層組合觀測值進行線性化,結(jié)合低軌衛(wèi)星運動方程,構(gòu)建濾波器的函數(shù)模型為
(3)
其中,i為歷元;Φ為狀態(tài)轉(zhuǎn)移矩陣;W為過程噪聲;z為觀測值;A為觀測值線性化的測量矩陣;v為測量噪聲。
SRIF過程分為時間更新和測量更新。基于先驗狀態(tài)信息,通過數(shù)值積分預(yù)報當(dāng)前歷元低軌衛(wèi)星的位置與速度及其方差信息,實現(xiàn)時間更新。利用預(yù)報的參數(shù)矢量線性化測量方程,再通過正交變換更新信息矩陣并轉(zhuǎn)換為上三角陣,最后直接逆序求解參數(shù)完成測量更新過程[24-25]。
1.2 廣播星歷旋轉(zhuǎn)誤差提取及修正
廣播星歷旋轉(zhuǎn)誤差參數(shù)通過赫爾默特相似變換提取,以武漢大學(xué)解算的事后多系統(tǒng)精密軌道為參考,對廣播星歷軌道進行相似轉(zhuǎn)換。具體的轉(zhuǎn)換方程如下
rpre=rbrd+D+Rrbrd+Srbrd
(4)
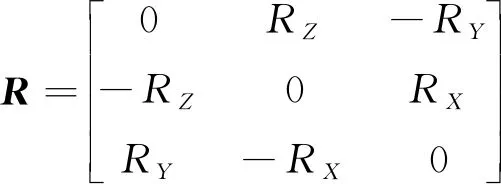
根據(jù)上述方式提取GPS和BDS-3衛(wèi)星旋轉(zhuǎn)參數(shù)RX,RY,RZ。定軌計算時,式(1)中由廣播星歷計算得到的GNSS軌道按照式(5)改正整體星座旋轉(zhuǎn)誤差, 從而可分析廣播星歷旋轉(zhuǎn)誤差對低軌衛(wèi)星實時定軌的影響。
(5)
1.3 數(shù)據(jù)
LT-01A衛(wèi)星于2022年1月26日發(fā)射,位于高度600 km、傾角97.8°的近太陽同步軌道上。它攜帶一套 GNSS 接收器和天線,可以同時跟蹤機載 GPS 和 BDS-3 信號。為了進行星上性能比較和相互備份,LT-01A衛(wèi)星配備了兩臺獨立雙模GNSS接收機,能夠同時跟蹤GPS和BDS多頻信號。星載接收機能跟蹤所有 GPS 衛(wèi)星的 L1 C/A、L2 P(Y) 頻點信號和除北斗地球靜止軌道衛(wèi)星外所有 BDS-2 和 BDS-3 衛(wèi)星的B1I、B3I 頻點信號以及BDS-3衛(wèi)星的B1C、B2a 頻點信號。
收集了LT-01A衛(wèi)星2023年1月10日~2月4日期間共25天的星載GPS和BDS-3觀測值用于實時定軌分析,也對應(yīng)收集了該時段內(nèi)的GPS和BDS-3廣播星歷和精密星歷用于分析廣播星歷旋轉(zhuǎn)誤差,從而驗證其對LT-01A衛(wèi)星的實時定軌精度的影響。
2 廣播星歷旋轉(zhuǎn)誤差
2.1 旋轉(zhuǎn)誤差參數(shù)
圖1顯示了所選擇25天內(nèi)的GPS和BDS-3廣播星歷與事后精密星歷進行相似變換的三軸旋轉(zhuǎn)參數(shù)序列。可見,GPS三軸旋轉(zhuǎn)參數(shù)的變化幅度較小,基本上在±2 mas范圍之內(nèi)變化。然而,該時段內(nèi)BDS-3廣播星歷的旋轉(zhuǎn)誤差呈現(xiàn)較大的變化幅度。年積日2023/12天RX,RY和RZ3個旋轉(zhuǎn)參數(shù)都接近于0,表示該天旋轉(zhuǎn)誤差較小;自此開始,RX和RY均呈現(xiàn)顯著線性下降趨勢,RY下降趨勢最為顯著,在2023/24天幅度最大達到-8.7 mas,RX最大降至-3.6 mas;RZ則呈現(xiàn)先上升然后下降的趨勢,在2023/20天達到最大值7.4 mas。直至年積日2023/27天,3個旋轉(zhuǎn)參數(shù)均減小至0附近,并在之后又開始逐漸增大。
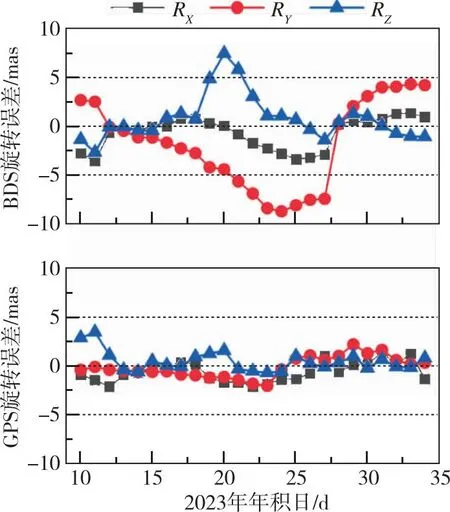
圖1 BDS-3和GPS旋轉(zhuǎn)參數(shù)序列
文獻[20]顯示了RX和RY旋轉(zhuǎn)誤差和廣播星歷所采用的EOP誤差呈現(xiàn)線性相關(guān)性,具體地,RX和Y軸極移誤差相關(guān),而RY和X軸極移誤差相關(guān)。由于EOP預(yù)報誤差隨時間增大,受此影響,廣播星歷旋轉(zhuǎn)誤差也隨即增加。BDS-3系統(tǒng)進行EOP預(yù)報模型更新周期一般在7天左右[20,27]。結(jié)合所選時段內(nèi)BDS-3廣播星歷旋轉(zhuǎn)參數(shù)及EOP誤差的變化趨勢,可判斷年積日2023/12~2023/27天內(nèi)BDS-3應(yīng)未更新EOP預(yù)報模型,導(dǎo)致其旋轉(zhuǎn)誤差呈現(xiàn)較大的變化幅度。由于GPS采用美國國家地理空間情報局(National Geospatial-Intelligence Agency, NGA)每天更新的EOP預(yù)報模型[26-27],其整體誤差較小,因此旋轉(zhuǎn)誤差相比BDS-3小且變化較為穩(wěn)定。
表1中對所選時段內(nèi)GPS和BDS-3廣播星歷旋轉(zhuǎn)參數(shù)的RMS誤差進行了統(tǒng)計。GPS廣播星歷X、Y、Z3個方向旋轉(zhuǎn)RMS誤差分別為1.17,1.09,1.17 mas,BDS-3則分別為1.76,4.81,2.45 mas。整體而言,BDS-3的旋轉(zhuǎn)誤差是GPS的2.5倍左右。
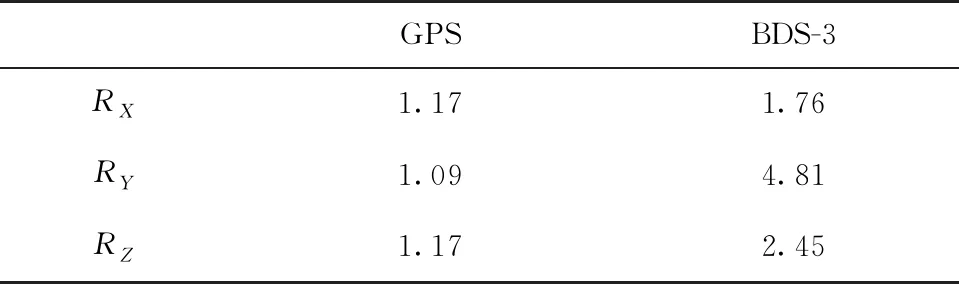
表1 BDS-3和GPS旋轉(zhuǎn)參數(shù)統(tǒng)計
2.2 對廣播星歷精度影響分析
為了進一步分析GPS和BDS-3各自的廣播星歷旋轉(zhuǎn)誤差造成的軌道精度損失,圖2顯示了GPS和BDS-3廣播星歷在旋轉(zhuǎn)誤差改正前后的誤差統(tǒng)計時序,即按天統(tǒng)計所有衛(wèi)星廣播星歷在切向、法向和徑向上的RMS誤差。旋轉(zhuǎn)造成的軌道位置誤差與軌道高度直接有關(guān);1 mas的旋轉(zhuǎn)誤差會導(dǎo)致MEO上約12 cm的位置誤差, IGSO由于軌道更高,其影響量級約在20 cm左右[20]。因此,圖2中BDS-3 IGSO和MEO兩類衛(wèi)星分別統(tǒng)計。
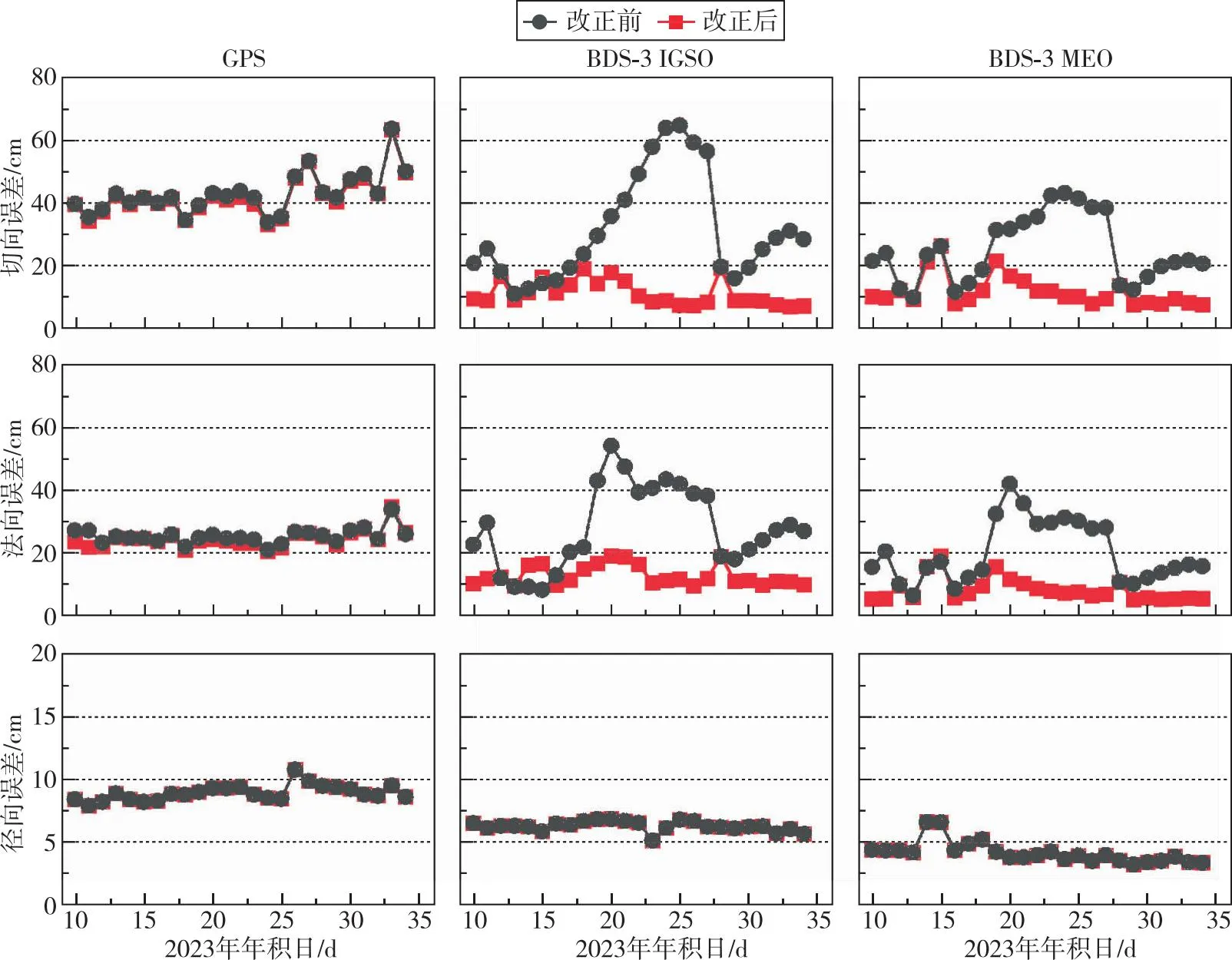
圖2 添加旋轉(zhuǎn)改正前后的GPS與BDS-3衛(wèi)星廣播星歷軌道誤差
顯然可見,GPS廣播星歷由于整體旋轉(zhuǎn)誤差較小在1 mas左右,其改正前后軌道精度基本上沒有變化,其切向、法向和徑向軌道誤差基本上分別在40,20,10 cm量級變化。BDS-3衛(wèi)星則呈現(xiàn)顯著的與旋轉(zhuǎn)誤差趨勢和量級相對應(yīng)的軌道誤差。在年積日2023/20天BDS-3星歷Z軸旋轉(zhuǎn)誤差達到最大,對應(yīng)的BDS-3 IGSO和MEO在該天法向的誤差達到最大,分別為54.1 cm和42.1 cm;而在2023/24天Y軸旋轉(zhuǎn)誤差達到最大為-8.7 mas,該天BDS-3 IGSO和MEO的切向誤差分別為63.8 cm和43.2 cm,也是所選時段內(nèi)最差的。BDS-3衛(wèi)星廣播軌道經(jīng)過旋轉(zhuǎn)修正后改進明顯。整體而言,年積日2023/12~2023/27天在未修正旋轉(zhuǎn)誤差時,BDS-3 MEO衛(wèi)星切向和法向誤差保持在較高的水平,達到30 cm左右;進行旋轉(zhuǎn)改正后,均降低至10 cm量級。對于BDS-3 IGSO衛(wèi)星,其改進效果更大,切向和法向可以從40~60 cm改進至10~20 cm水平,最大降幅甚至超過50 cm。另一方面,由于旋轉(zhuǎn)并不會改變位置矢量的長度,BDS-3 MEO和IGSO的徑向誤差并不受到旋轉(zhuǎn)誤差的影響,均在5 cm水平,比GPS高約1倍。
表2則對GPS、BDS-3 IGSO和MEO三類衛(wèi)星在旋轉(zhuǎn)改正前后的軌道誤差進行統(tǒng)計。GPS整體改進不到1 cm,其切向、法向和徑向誤差平均為42.2,24.7和8.9 cm。BDS-3兩類衛(wèi)星均顯示出顯著改進。BDS-3 IGSO衛(wèi)星的切向誤差從31.5 cm降低至11.3 cm,法向從28.0 cm降低至12.9 cm,降幅分別達到64.0%和53.8%。BDS-MEO衛(wèi)星切向和法向則分別從25.0 cm和20.0 cm降低至11.9 cm和8.7 cm,降幅分別為52.4%和57.1%。徑向誤差為導(dǎo)航系統(tǒng)空間信號精度的最主要的貢獻分量,BDS-3 IGSO和MEO徑向誤差分別為6.3 cm和4.2 cm,比GPS分別小29.7%和53.3%。
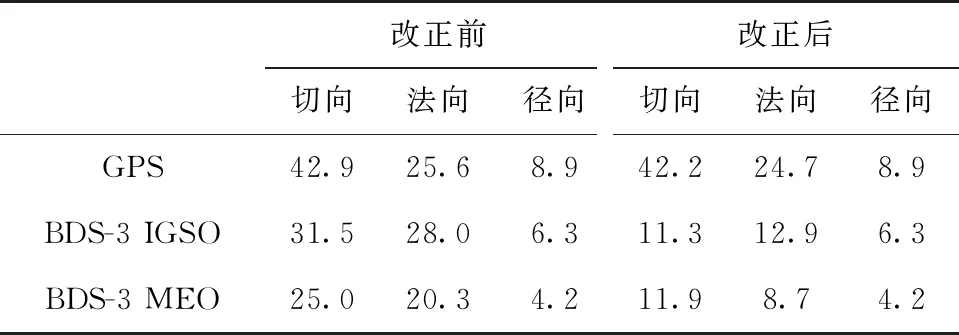
表2 添加旋轉(zhuǎn)改正的GPS和BDS-3廣播星歷軌道誤差RMS統(tǒng)計值
3 LT-01A實時定軌
3.1 定軌策略
本文采用簡化動力學(xué)方法進行實時定軌,實時定軌策略如表3所示,主要包括衛(wèi)星動力學(xué)模型、觀測模型及參數(shù)估計模型三大類信息。動力學(xué)模型方面,由于低軌星載平臺算力有限、內(nèi)存資源緊張,實時定軌的動力學(xué)模型相對于事后精密定軌需要進行簡化,重力場模型僅采用靜態(tài)場,海潮攝動僅為5×5 階次。根據(jù)已有的星體幾何模型信息構(gòu)建了簡易的Box-wing模型以計算大氣阻力、太陽輻射光壓等非保守攝動力;由于星體受照面和迎風(fēng)面計算需顧及姿態(tài),本文采用星載星敏傳感器提供的姿態(tài)四元數(shù)數(shù)據(jù)計算LT-01A衛(wèi)星姿態(tài)。本文采用簡化動力學(xué)方法進行實時定軌,因此在切向和法向添加經(jīng)驗加速度補償動力學(xué)模型中的誤差。
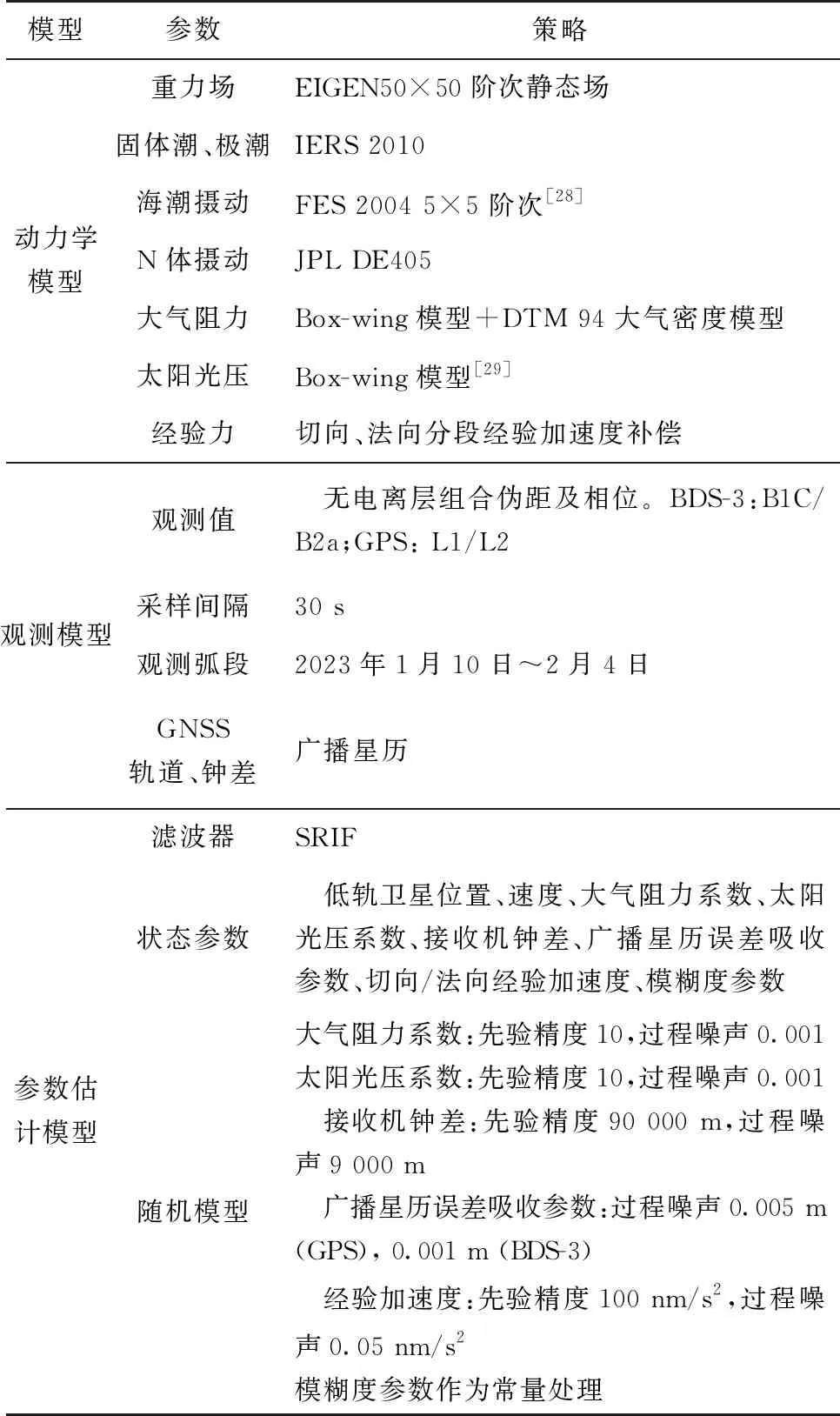
表3 LT-01A實時定軌策略
實時定軌的觀測模型如式(1)所示,采用基于BDS-3 B1C/B2a及GPS L1/L2的雙頻無電離層組合觀測值,定軌弧段為2023年1月10日~2月4日。參數(shù)估計方面,實時定軌采用SRIF作為參數(shù)估計器,待估狀態(tài)量如式(2)所示。其中,大氣阻力系數(shù)、太陽光壓系數(shù)、接收機鐘差、廣播星歷誤差吸收參數(shù)及切向/法向經(jīng)驗加速度作為隨機游走參數(shù)估計,模糊度參數(shù)作為常量估計。
3.2 定軌結(jié)果
根據(jù)上述方法,本文采用自主開發(fā)的星載GNSS實時定軌軟件對2023年1月10日~2月4日的LT-01A星載GPS與BDS-3觀測值進行模擬星載實時定軌處理,包括基于GPS、BDS-3及GPS/BDS-3觀測值的實時定軌。為了分析廣播星歷旋轉(zhuǎn)誤差對實時定軌精度的影響,所有實時定軌處理均包括不考慮旋轉(zhuǎn)改正和添加旋轉(zhuǎn)改正等兩組處理結(jié)果。為評估實時定軌精度,采用武漢大學(xué)事后精密軌道鐘差產(chǎn)品計算了LT-01A精密軌道,其6 h重疊弧段精度優(yōu)于1 cm,具有較好的軌道一致性,可以作為參考值。
圖3顯示了基于星載GPS、BDS-3、GPS/BDS-3觀測值的實時定軌在旋轉(zhuǎn)誤差改正前后的切向、法向和徑向定軌誤差單日RMS統(tǒng)計時序。由于GPS廣播星歷整體旋轉(zhuǎn)誤差較小且旋轉(zhuǎn)改正前后的廣播星歷軌道精度基本不變,基于GPS的實時定軌精度在添加旋轉(zhuǎn)改正前后基本沒有變化,其切向、法向及徑向誤差分別在 20~40,10~20和10~15 cm內(nèi)變化。
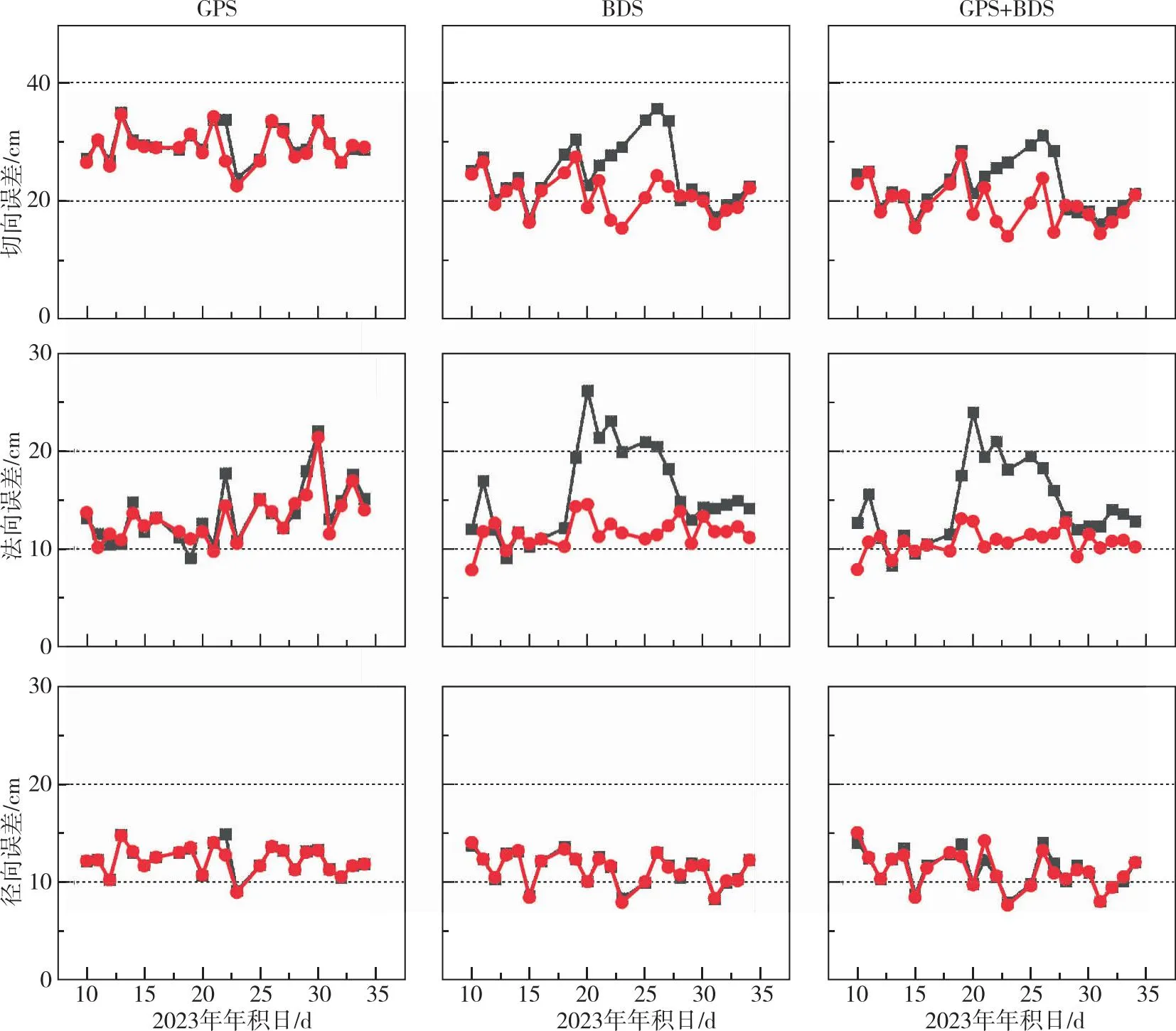
圖3 LT-01A衛(wèi)星實時定軌誤差單日統(tǒng)計(黑色:旋轉(zhuǎn)改正前;紅色:旋轉(zhuǎn)改正后)
基于BDS-3的實時定軌則顯著表現(xiàn)出與旋轉(zhuǎn)誤差趨勢對應(yīng)的定軌誤差變化。在年積日2023/18~27 天BDS-3廣播星歷Y軸與Z軸旋轉(zhuǎn)誤差增大時,實時定軌的切向與法向誤差也出現(xiàn)了明顯增大的趨勢。當(dāng)年積日2023/20天BDS-3廣播星歷Z軸旋轉(zhuǎn)誤差及廣播星歷軌道法向誤差達到最大時,實時定軌的法向誤差最大,為24.0 cm。當(dāng)年積日2023/26天BDS-3廣播星歷軌道切向誤差最大時,基于BDS-3的實時定軌切向誤差也達到最大,為31.1 cm。添加旋轉(zhuǎn)改正后,基于BDS-3的實時定軌誤差在旋轉(zhuǎn)誤差較大的年積日2023/18~27時段內(nèi)顯著降低,切向定軌誤差從30 cm量級降至20 cm量級,法向定軌誤差從 20 cm量級降低至 15 cm以下。其中,年積日2023/23天時切向定軌誤差改善最大,為13.8 cm;年積日2023/20天時法向定軌誤差改善最大,為11.6 cm。由于衛(wèi)星軌道徑向基本不受旋轉(zhuǎn)誤差的影響,基于BDS-3的實時定軌徑向誤差基本不受旋轉(zhuǎn)改正的影響。
基于GPS/BDS-3聯(lián)合觀測值的實時定軌誤差與基于BDS-3的實時定軌誤差量級與變化趨勢基本一致,該現(xiàn)象與文獻[16]中基于星載GPS/Galileo的Sentinel-6A實時定軌結(jié)果類似。顯然,旋轉(zhuǎn)改正也顯著提升了旋轉(zhuǎn)誤差較大時段的聯(lián)合實時定軌切向與法向精度,切向精度提升最高為13.9 cm,法向精度提升最高為11.2 cm。添加旋轉(zhuǎn)改正后的基于BDS-3的實時定軌與基于GPS/BDS-3的實時定軌的切向誤差為20 cm量級,而基于GPS的實時定軌的切向誤差僅為30 cm量級,比前二者差約33%。
表4統(tǒng)計了整個定軌弧段內(nèi)的基于GPS、BDS-3、GPS/BDS-3的實時定軌在旋轉(zhuǎn)改正前后的切向、法向、徑向的誤差RMS統(tǒng)計。由于GPS星歷在旋轉(zhuǎn)改正前后差別不超過1 cm,因此基于GPS的實時定軌基本不受廣播星歷旋轉(zhuǎn)誤差的影響。基于BDS-3的實時定軌精度在旋轉(zhuǎn)改正后明顯改善,切向誤差由 24.7 cm降至21.0 cm,法向誤差由15.7 cm降至10.7 cm,三維誤差由31.9 cm降至26.7 cm,降幅分別為15.0%,31.8%及16.3%。基于GPS/BDS-3的實時定軌也顯示出明顯改進,切向、法向、徑向和三維誤差在改正前精度分別為22.4,14.5,11.3,和29.2 cm,改正后分別為19.4,10.7,11.2和25.0 cm,在切向、法向、三維分別提升了13.4%,26.2%及14.4%。得益于BDS-3廣播星歷較低的SISRE,單BDS-3定軌、GPS/BDS-3聯(lián)合定軌的精度均優(yōu)于單GPS定軌,未改正旋轉(zhuǎn)誤差時前二者總體定軌精度比后者分別高3.2 cm和5.9 cm,改善幅度分別為9.1%和16.8%,改正后則定軌精度提升更為顯著,分別達到7.8 cm和9.5 cm,改善幅度達到22.6%和27.5%。由于冗余觀測更多,聯(lián)合定軌相比單BDS-3的實時定軌三維精度在旋轉(zhuǎn)改正前后也分別提升了2.7 cm和1.7 cm,分別改善8.5%和6.4%。

表4 LT-01A定軌精度統(tǒng)計
4 結(jié)論
本文通過研究,得到如下結(jié)論:
1)BDS-3廣播星歷的X,Y,Z三軸旋轉(zhuǎn)誤差分別為1.76,4.81,2.45 mas,GPS廣播星歷的三軸旋轉(zhuǎn)誤差僅為1.17,1.09,1.17 mas。BDS-3廣播星歷的旋轉(zhuǎn)誤差約為GPS廣播星歷的2.5倍。
2)GPS廣播星歷軌道精度基本不受廣播星歷旋轉(zhuǎn)誤差的影響,而BDS-3廣播星歷軌道精度受廣播星歷旋轉(zhuǎn)誤差影響顯著,且與衛(wèi)星軌道高度直接相關(guān)。添加旋轉(zhuǎn)改正后, BDS-3 IGSO衛(wèi)星廣播星歷的軌道誤差在切向、法向、徑向分別為11.3 cm,12.9 cm,6.3 cm,相比于旋轉(zhuǎn)改正前切向與法向誤差降低了64.0%和53.8%。BDS-3 MEO衛(wèi)星廣播星歷的軌道誤差在切向與法向也降低了52.4%和57.1%,表明旋轉(zhuǎn)改正可以有效消除旋轉(zhuǎn)誤差帶來的BDS-3廣播星歷軌道精度損失。
3)由于GPS廣播星歷旋轉(zhuǎn)誤差量級較小,基于星載GPS的LT-01A衛(wèi)星實時定軌精度基本不受旋轉(zhuǎn)誤差影響,其切向、法向、徑向和三維定軌誤差分別為29.2,13.2,12.3及34.5 cm。基于星載BDS-3以及BDS-3/GPS聯(lián)合的實時定軌精度受BDS-3星歷旋轉(zhuǎn)誤差影響嚴重,且主要作用于切向和法向。考慮旋轉(zhuǎn)改正后,單獨BDS-3實時定軌在切向、法向、徑向RMS分別為21.0 cm,10.7 cm及11.2cm,其切向和法向精度比改正前分別提升15.0%和31.8%,總體三維精度則由31.9cm提高到26.7cm,改善幅度達16.3%;GPS/BDS-3聯(lián)合定軌在切向、法向、徑向精度分別為19.4 cm,10.7 cm和11.2 cm,切向和法向精度比未旋轉(zhuǎn)改正時分別提升13.4%和26.2%,總體三維精度則由29.2 cm提高到25.0 cm,改善幅度為14.4%。得益于BDS-3廣播星歷較高的精度,單BDS-3以及BDS-3/GPS聯(lián)合的實時定軌精度均優(yōu)于單GPS定軌,未顧及星歷旋轉(zhuǎn)改正時前兩者定軌精度比后者分別高9.1%和16.8%,添加旋轉(zhuǎn)改正后精度提升幅度更加顯著,分別達到22.6%和27.5%。
本文基于LT-01A的星載實測BDS-3/GPS數(shù)據(jù)驗證了星歷旋轉(zhuǎn)誤差對于低軌實時精密定軌的影響。由于旋轉(zhuǎn)參數(shù)需通過廣播星歷與事后精密星歷進行相似變換獲取,后續(xù)將繼續(xù)研究在實時定軌實施過程中同步估計星歷旋轉(zhuǎn)誤差以滿足實時在軌處理要求。