密林環境空地協同GNSS/UWB快速高精度定位技術
2024-03-05 11:14:16王星星張子騰盛傳貞蔚保國張京奎易卿武
導航定位與授時 2024年1期
關鍵詞:實驗
王星星,張子騰,3,盛傳貞,蔚保國,張京奎,易卿武
(1.中國電子科技集團公司第五十四研究所,石家莊 050081;2.衛星導航系統與裝備技術國家重點實驗室,石家莊 050081;3.東南大學儀器科學與工程學院,南京 210096)
0 引言
現階段,位置服務的獲取主要依賴于全球衛星導航系統(global navigation satellite system, GNSS)。而在密林環境中,由于受地形和冠層的影響,衛星信號遮擋嚴重,觀測值噪聲大,多路徑效應明顯[1];此外,密林區域常常地處偏僻地區,通信受阻,使得衛星定位無法滿足諸如森林資源管理、野外救援、森林巡護、邊界與面積測量等應用的高精度定位需求[2]。
近年來,超寬帶(ultra-wideband, UWB)作為一種新型的高精度無線交匯定位技術出現,利用極窄脈沖傳輸,具有強穿透性和抗多徑能力,適用于開闊區、半遮蔽區、遮蔽區高精度定位[3-5]。目前,UWB定位技術已廣泛應用于室內定位,但需提前在特定位置安裝部署基站,對于臨時定位場景來說使用不便且成本高昂。空曠環境下,無人機平臺可快速運動,按需部署,由于其高度靈活,在應急環境下常作為空中基站與地面用戶建立連接[6-8],利用無人機攜帶UWB布設可移動基站成為新的思路。有學者提出利用無人機攜帶GNSS/UWB移動基站輔助定位。文獻[9]提出了一種融合GNSS/UWB的協同定位算法,在城市復雜環境下將UWB技術應用于車輛協同導航定位,精度達到分米級。文獻[10]提出了一種UWB增強的車輛協同定位方法,通過現場實驗生成真實數據集驗證了方法的可靠性。文獻[11]利用無人機搭載GNSS/UWB,配合地面界址點,按照單機繞飛、多點組網測距的方式完成界址點定位。可見,無人機結合GNSS/UWB的技術具有很多潛在價值,在密林環境下,綜合考慮無人機平臺在空曠環境快速運動與超寬帶的強穿透性測量等特征,利用無人機搭載GNSS/UWB集成化載荷作為空中基站,理論上可實現林中標簽高精度定位,為密林環境下高精度定位需求提供服務。
在此背景下,密林環境GNSS/UWB定位技術成為一項重要研究課題。本文提出了一種密林環境空地協同GNSS/UWB快速高精度定位技術,通過無人機攜帶GNSS/UWB集成化載荷,以移動單基站模擬多基站,配合密林中UWB標簽組網測距,完成密林中UWB標簽定位,針對運動載體,進一步提出位移輔助的定位方法。利用密林環境下實測測距實驗+仿真定位實驗對提出的方法進行驗證,首先,在測試區域內對無人機基站布設方案展開研究;其次,通過實測實驗分析密林環境下UWB測距誤差;最后,設計仿真定位實驗,統計定位精度。
1 定位模型
1.1 空地協同的系統構成與原理
目標進入密林后,由于衛星信號遮擋難以定位,利用搭載GNSS/UWB集成化載荷的無人機在密林上空空曠區域飛行,以移動單基站模擬多基站,建立可移動UWB測距網絡,搜索密林中UWB標簽信號,鎖定UWB基站可布設區域,具體布設區域如圖1(a)所示。圖1(b)展示了空地協同定位原理,在密林上空,通過GNSS 星基增強實時動態精密單點定位(precise point positioning-real time kinematic, PPP-RTK)技術對基站位置實時標定,獲取基站位置;在密林中,通過UWB測距系統進行測距,獲取距離觀測值。以基站位置和UWB測距量為原始觀測值,基于空間后方交會原理構建觀測方程,通過最小二乘算法[12]求解得到密林中UWB標簽的絕對位置。
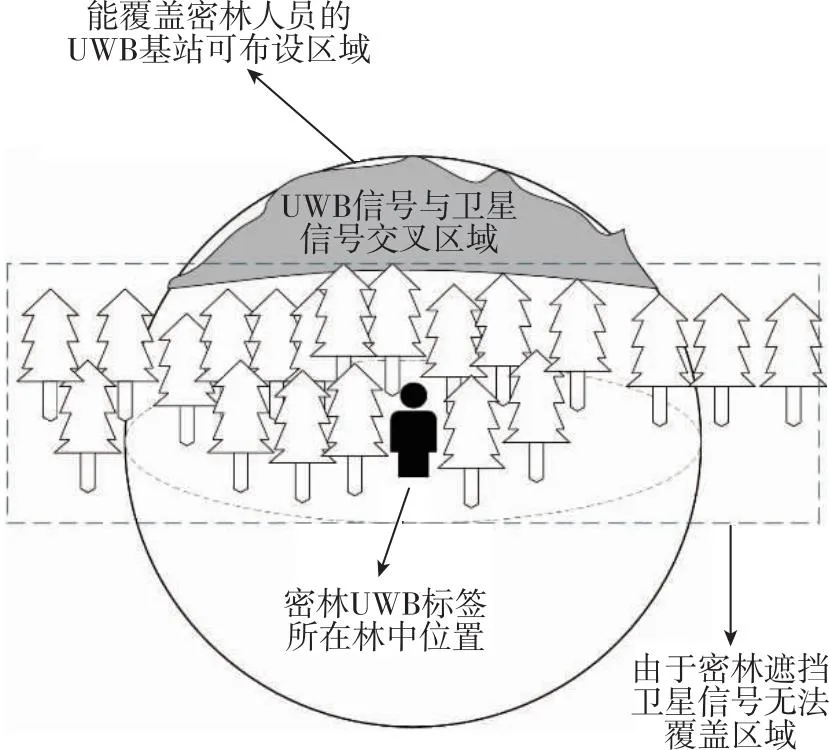
(a) 基站布設區域示意
1.2 定位模型
基于空地協同定位原理建立觀測方程如下
(1)
式中,(Xn,Yn,Zn)表示無人機基站位置;Ln表示UWB測量距離;(xn,yn,zn)表示目標標簽求解位置;n表示基站序號(根據無人機移動的時間先后順序編號)。

(2)
式中,(x,y,z)表示n=1對應時刻載體的初始位置,將式(2)代入式(1),位移輔助的動態定位觀測方程如下
(3)
式中,無人機基站位置為通過PPP-RTK標定的坐標和載體位移建立的虛擬坐標。
為降低定位計算復雜度,使用最小二乘法求解待測點坐標,其函數模型為As=b,其中,A為系數矩陣,b為觀測向量,s為未知參數向量,本文中對應載體位置(x,y,z)。對公式在s=s0|x=x0,|y=y0,z=z0處線性化,線性化之后觀測方程表示為

(4)
式中
則矩陣A和b表示為
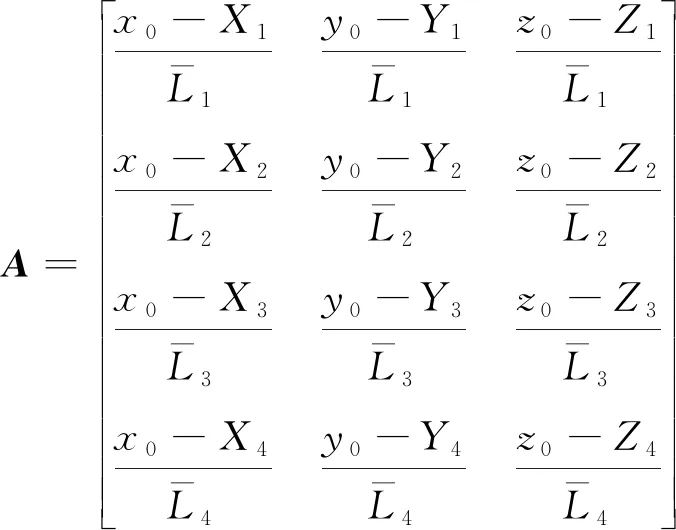
(5)
根據最小二乘原理求解待測點位置坐標并迭代求解,求解公式為s=(ATA)-1ATb。
1.3 精度評價
距離交匯技術的定位精度主要在于測距準確度、基站網型以及定位算法等參數[13],在定位算法確定的情況下,主要影響因素為測距準確度和基站布設。
在測距準確度確定的情況下,定位精度取決于無人機基站布設,可通過位置精度因子(position dilution of precision, PDOP)值衡量基站布設對定位精度的影響,以等高線圖形式直觀形象地表示出不同基站構型在測試區域內對不同點位定位精度影響的大小[14-15]。某點處PDOP值越小表示該處定位精度越高,在本文設計方法中,無人機基站布設的PDOP取值與基站布設的網型、范圍(點位數量)及高度有關。
在無人機基站確定的情況下,定位精度直接取決于距離測量的精度,利用真實坐標計算真實距離,給定距離測量誤差,仿真UWB距離觀測值,然后按照空地協同定位方法計算目標位置,每點重復測量200次,并與真實坐標作差對比,計算均方根值(root mean square, RMS)評估其精度。
2 仿真實驗
首先分析不同網型、不同范圍、不同高度基站布設的PDOP值,然后根據實測實驗確定UWB測距誤差,最后設計仿真實驗,分析定位誤差。
2.1 無人機基站布設
(1)網型設計
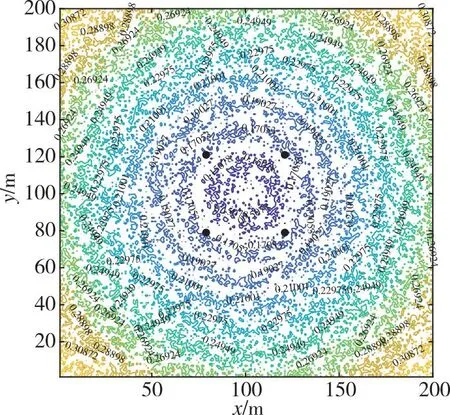
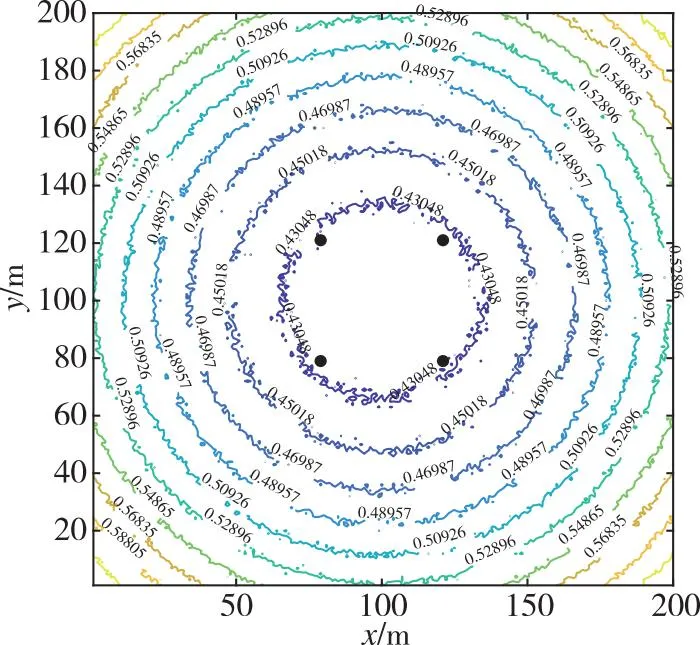
本文使用無人機飛行模擬多基站,設計每隔1 s確定一個基站位置。考慮到無人機飛行速度恒定,相鄰歷元間基站距離相等,在同一高度面設計了4種網型,分別為正方形、折線形、菱形、直Z形,分析高度為100 m時的PDOP分布。選取200 m×200 m的實驗區域,結果如圖2所示。可以看出,正方形構型的PDOP值圖像體現出良好的中心對稱性,以基站為中心各個方向分布均勻,幾何構型明顯高于其他幾種方式。因此,正方形構型不僅適用于初期標簽位置未知時對目標的搜索,同時也適用于搜索到目標后對目標的測量標記。
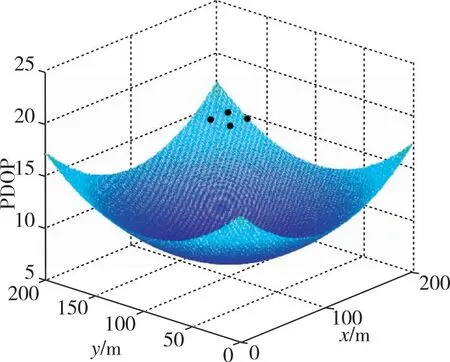
(a) 正方形
(2)范圍設計
設計無人機的巡航速度約為14 m/s,每1 s飛行一條邊,可構成14 m×14 m的正方形基站網型,每點懸停1 s,7 s完成一次定位;每2 s飛行一條邊,可構成28 m×28 m的正方形基站網型,每點懸停1 s,10 s完成一次定位;每3 s飛行一條邊,可構成42 m×42 m的正方形基站網型,每點懸停1 s,13 s完成一次定位;每4 s飛行一條邊,可構成56 m×56 m的正方形基站網型,每點懸停1 s,16 s完成一次定位。以80 m高度為例,不同邊長的構型在200 m×200 m的區域內對應的PDOP如圖3所示。
從圖3可以看出,正方形邊長越長,基站構型越好,表現在隨著正方形邊長的增加,相應區域內的PDOP值縮小,若邊長成倍增加,PDOP值對應縮小。進一步地,組成42 m×42 m的構型需要13 s,這個時間可滿足28 m×28 m構型在每邊加密一點;同樣地,組成56 m×56 m的構型需要16 s,這個時間可滿足42 m×42 m構型在每邊加密一點。如圖4所示,可以看出,與42 m×42 m的4點正方形構型相比,28 m×28 m的7點正方形構型雖點位多,但是在測區范圍內PDOP值更大;同樣地,42 m×42 m 的 7點正方形構型PDOP值也比56 m×56 m 的4點正方形構型更大。也就是說,同樣的組網時間下,增大網型范圍對于PDOP值的優化效果優于加密網型基站點。
(a) 28 m×28 m
(3)高度設計
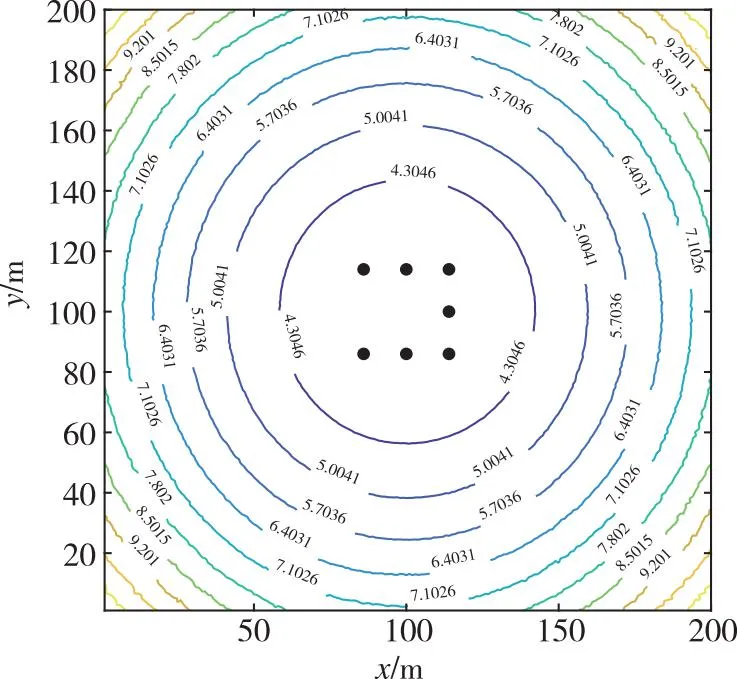
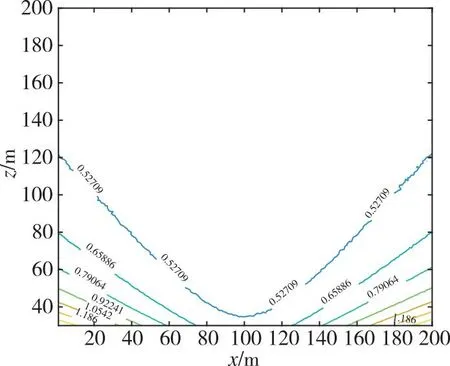
分析基站布設范圍為14 m×14 m,28 m×28 m時,縱坐標為100,橫坐標在0~200范圍內,PDOP、水平分量精度因子(horizontal dilution of preci-sion, HDOP)、垂直分量精度因子(vertical dilution of precision, VDOP)隨飛行高度的變化,結果如圖5所示。可以看出,隨飛行高度的增加,HDOP增加,VDOP減小,即受基站幾何構型影響的平面定位精度隨高程增加而減小,高程定位精度隨高程增加而增大。而在三維方向上,PDOP值隨著高度增加呈現先減小后增大的趨勢,即三維定位精度隨高度增加呈現先增大后減小的規律,且平面方向越遠離基站,規律越明顯。
(a) 14 m×14 m基站構型PDOP
2.2 UWB測距誤差分析
視距條件下,UWB測距誤差約為0.1 m,而在密林中,由于樹葉及枝干遮擋帶來非視距誤差。本節利用空循環LinkTrack P-B室內外高精度測距模組設計測距實驗,分析其在樹木遮擋環境下的測距性能。測試場景如圖6所示, UWB基站布設于高樓窗邊模擬無人機,標簽在樓下廣場移動,基站和標簽之間始終有多層茂密大樹遮擋。在每個標簽點位均進行兩組測距實驗,一組直接利用LinkTrack P-B室內外高精度測距模組進行測距,另一組在同樣位置放置GNSS天線,通過實時動態載波相位差分技術(real-time kinematic,RTK)解算高精度位置,然后反算求解距離。以RTK解算距離作為參考真值,分析UWB在樹木遮擋環境下的測距誤差。在整個實驗過程中,標簽放置于開闊或半開闊地帶,可以接收到足夠衛星進行RTK解算,保證了測距參考值的準確性。
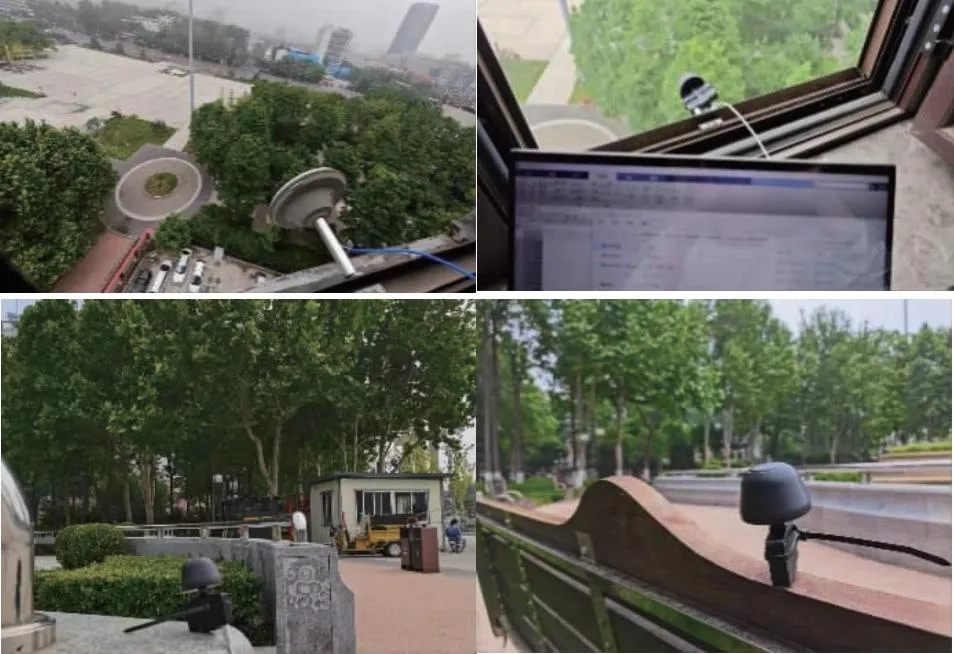
圖6 UWB測距誤差測試場景
表1顯示了RTK解算參考值,UWB測試均值、標準差(standard deviation, STD)及誤差RMS,本次測試距離主要集中在100~200 m范圍,從表中可以看出,在樹木遮擋條件下,UWB距離STD分布于0.04~0.07 m之間,均值為0.05 m,誤差RMS分布于0.05~0.29 m之間,均值為0.17 m。
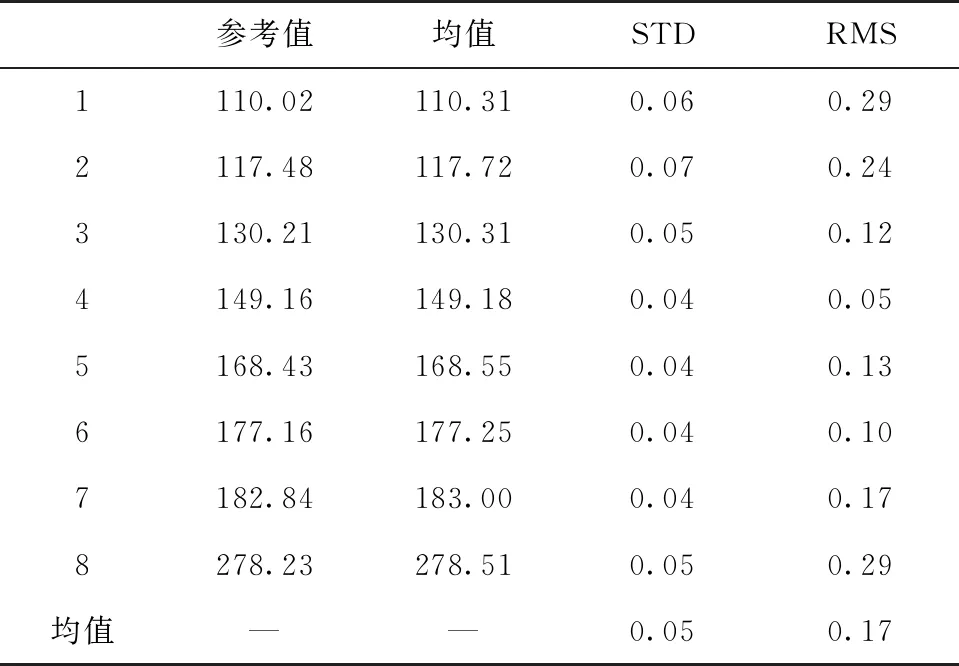
表1 UWB測距誤差結果統計
2.3 仿真實驗分析
通過無人機基站布設實驗驗證無人機基站布設對定位結果的影響規律,從UWB測距誤差分析實驗得出在樹木遮擋環境下UWB的測距誤差,將此兩項分析結果應用于仿真測試中,開展3個仿真實驗。實驗1驗證在靜態條件下的定位精度,實驗2驗證在動態條件下的定位精度,實驗3驗證在測距誤差變化條件下的定位精度。
(1)仿真實驗1
本節仿真實驗依據在密林下UWB測距誤差結果,設計測距誤差為0.2 m,方差為0.05 m,如圖7所示。分析基站布設范圍為14 m×14 m,28 m×28 m時,標簽縱坐標為100,橫坐標在0~200范圍內定位誤差隨高度的變化,結果如圖8所示。
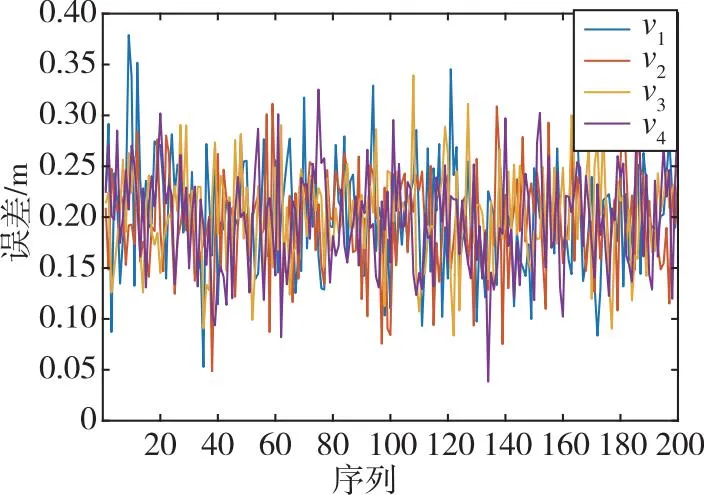
(a) UWB測距仿真誤差序列
(a) 14 m×14 m基站構型平面定位誤差
從圖8可以看出,在同樣高度下,28 m×28 m無人機構型定位精度優于14 m×14 m,也就是說,基站布設邊長越長,定位精度越高,相應地,所需時間也越長,這和圖3中PDOP值體現的規律一致。隨著高度增加,平面定位誤差增大,而高程定位誤差減小,這和圖5中PDOP值體現的規律一致。在高度80 m以下,測區范圍內遠離基站處三維定位誤差隨高度減小而增大;在高度80 m以上,測區范圍內三維定位精度隨高度增加而增大。綜合來看,80 m是適用于整個測區范圍內三維定位誤差最小的高度。進一步觀察在高度80 m處42 m×42 m基站構型在測區范圍內的平面及高程定位精度,結果如圖9所示。可以看出,在整個測區范圍內,平面及高程定位誤差均在0.3 m以內,基站覆蓋區域內,平面及高程定位誤差均在0.2 m以內。
(a) 平面定位誤差
(2)仿真實驗2
仿真實驗1實現靜態載體的精密定位,根據式(3),要進一步實現動態載體的精密定位,需預先確定動態載體的位移。首先,進行運動載體的初始化,令載體在3個點位靜止,完成靜態定位,通過位置差分獲取位移,之后開始運動,通過戰術級慣性測量單元確定位移,每標定一個基站位置,對標簽進行同步定位。具體位移情況如圖10所示,載體在P4、P3、P2點位靜止,完成靜態定位,之后隨機運動。為確定P1位置,需確定P1P2、P1P3、P1P4之間的位移,其中P1P2位移通過慣性測量單元確定,P2P3、P2P4位移由位置差分得到,和P1P2位移累加,即可得到P1P3、P1P4位移。一次動態定位后,本次定位的P4點不再參與下次定位,P3/P2/P1依次變為下次定位的P4/P3/P2,依次重復計算,實現動態定位。
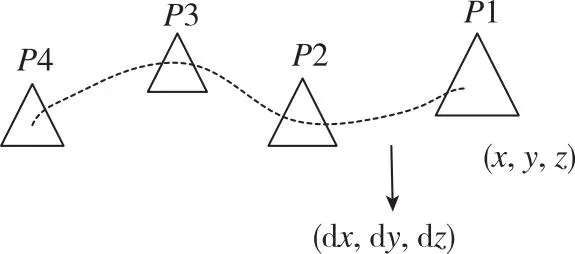
圖10 運動載體位移圖示
在測試區域內選擇A/B/C/D4個點位,設計運動軌跡,根據軌跡變化仿真其位移,并在位移中加入方差為0.1 m的隨機誤差,利用式(3)求解在高度80 m處42 m×42 m基站構型在測區范圍內A/B/C/D4點的平面及高程定位精度(測距誤差設計同仿真實驗1)。表2給出了在A/B/C/D4個點位標簽靜止與運動的定位誤差對比,可以看出,運動載體的定位精度低于靜止載體,整體保持在分米級。
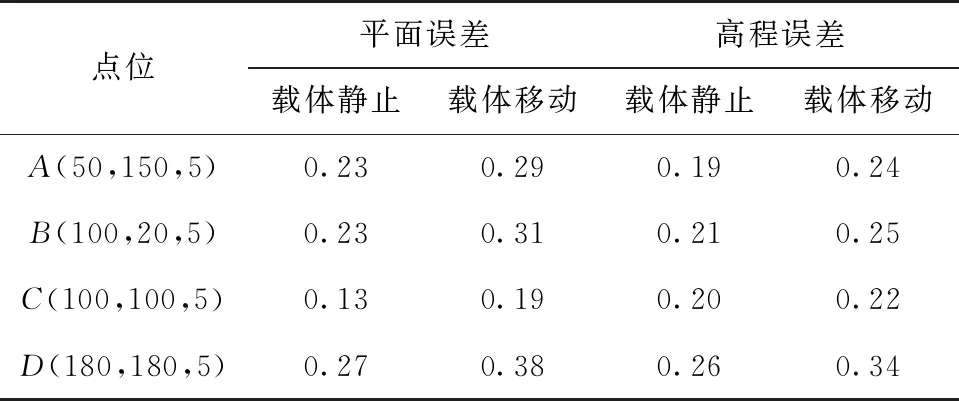
表2 靜止載體與運動載體的定位誤差對比
(3)仿真實驗3
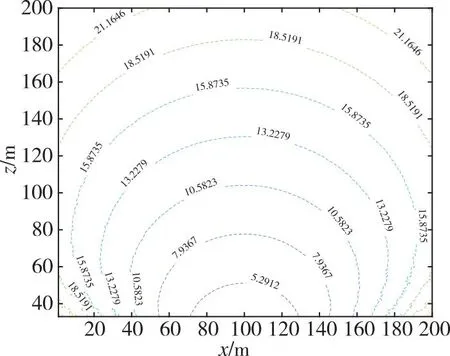
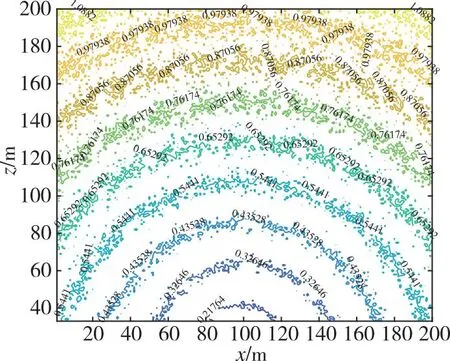
在林中測距時,由于樹干及樹葉遮擋造成非視距誤差,理論上,遮擋樹木越多,非視距誤差越大。對于林中標簽點位而言,無人機基站飛行高度越高,信號傳輸在林中的距離越短,相應造成的非視距誤差也越小。仿真實驗設計為UWB信號在林中的傳輸路徑每增大10 m,測距誤差增大0.2 m。分析基站布設范圍為42 m×42 m時,標簽縱坐標為100,橫坐標在0~200范圍內距離誤差、平面及高程定位誤差隨高度的變化,結果如圖11所示。
(a) 測距誤差
可以看出,在測區范圍內,隨著高度增加,測距誤差變小,在基站分布區域內,定位誤差隨高度增加而增加;在基站分布區域外,定位誤差隨高度增加而減小。在高度120 m以下,遠離基站區域的定位誤差大于0.7 m,綜合來看,120~200 m是適用于整個測區范圍內定位誤差比較小的高度。以120 m為例,圖12給出了42 m×42 m無人機構型在測區范圍內的距離誤差、平面及高程定位誤差。可以看出,基站覆蓋區域內,平面定位誤差小于0.3 m,高程定位誤差小于0.4 m,在整個測區范圍內,平面定位誤差為亞米級,高程定位誤差為分米級。
(a) 測距誤差
3 結論
針對密林中衛星信號遮擋難以實現高精度定位的問題,提出了一種密林環境下空地協同的GNSS/UWB定位方法,為密林環境下快速高精度定位方法提供了理論支持。
1)利用無人機攜帶GNSS/UWB集成化載荷升空作為空中基站,并通過PPP-RTK技術對基站位置進行實時標定,大大節省了基站布設時間,解決了傳統的 UWB可移動基站布設復雜、成本高等方面的問題。
2)對基站布設方案展開研究,驗證基站布設對定位精度的影響。仿真結果表明,通過優選基站布設網型、范圍及高度可有效提高定位精度,為密林環境下UWB定位技術的實際應用提供基站布設指導和依據。
3)對密林環境下UWB測距誤差進行實測,并將統計誤差應用于仿真實驗。結果表明,選擇合適的基站構型、范圍及高度可有效實現密林環境下的快速高精度定位。
該方法仍有不足,主要不穩定因素在于UWB的測距誤差,樹林茂密且枝干粗壯區域,測距誤差可能增大或者信號無法傳播,需探索減少非視距誤差及增強信號強度的方法,以增強定位算法的可靠性。本文基于仿真實驗驗證了空地協同GNSS/UWB定位算法的可行性。基于本文研究內容,我們正在研制GNSS/UWB一體化載荷,未來,將在大興安嶺密林地區對本文提出的定位方案進行實測驗證。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55