深海采礦轉場工況平臺—水下系統耦合動力響應特性研究
2024-03-12 09:28:32沈玉琦劉匯海唐友剛
海洋工程 2024年1期
沈玉琦,李 焱,劉匯海,唐友剛
(1.中國船舶集團有限公司第七〇八研究所,上海 200011;2.天津大學 建筑工程學院,天津 300350;3.天津大學 水利工程智能建設與運維全國重點實驗室,天津 300350)
海洋中尤其深海儲藏礦石極為豐富[1-3],中國于2001年獲得世界大洋協會授權開采太平洋CC 區的深海礦藏,水深范圍5.0 km以上[3-4],這里研究的深海礦產開采裝備,適合于6.0 km深水采礦。
采礦系統包括水面多功能采礦平臺、礦漿管道水力提升系統、海底自行式礦石集礦車。礦漿管道又稱為輸漿管,一般由鋼管和浮力材料構成,浮力材料外包在鋼管外層。海底自行式礦石采集系統主要設備是礦石采集車[4-5]。
深海采礦作業主要是轉場和采礦工況,其中轉場工況,由于采礦平臺航行使輸漿管遭受更大海流作用,因此更為危險。謝夢琪等[6]研究采礦系統的不同撤離方案對采礦系統安全的影響,尤其指出懸掛輸漿管整體撤離的危險因素。肖林京等[7]等進行了采礦船與輸漿管耦合系統的試驗研究,但試驗模擬的中繼站質量(50 t)偏小。陳智昊等[8]和宋環峰等[9]采用集中質量法,以采礦船運動作為邊界條件,計算輸漿管動拉力和中繼站運動等。
葉帆和晏莎[10]使用AQWA 程序計算采礦船的幅頻響應及輸漿管連接點的彎矩。Hong[11]建立了采礦船—輸漿管—中繼站的耦合模型,輸漿管底端自由,基于集中質量法離散輸漿管,分析輸漿管縱向振動。Kim等[12]建立了采礦船—揚礦硬管—中繼站的耦合模型,基于模態疊加法模擬輸漿管的運動。Song等[13]建模與葉帆和晏莎[10]類似,研究采礦船與輸漿管連接位置的相互作用。
目前國內外的研究工作,采用采礦船—輸漿管—采礦時域全耦合的計算較少,一般是分別建立采礦船及輸漿管模型,以采礦船運動作為邊界條件,計算輸漿管的動力響應。該方法計入了采礦船對輸漿管的影響,而沒有計入水下系統對采礦船運動影響,目前計算過程忽略了采礦船動力定位的影響,此外對于輸漿管的浮力材料也未考慮。
研究工作的創新在于:建立采礦平臺—輸漿管—浮力材料—中繼站一體化耦合動力計算模型,考慮風浪流載荷及動力定位作用,系統研究采礦系統的動力響應,評估推進器的可靠性,其中輸漿管采用梁單元模擬而不是集中質量法模擬,可得到輸漿管的軸力、彎矩在內的所有內力。
1 數值方法及輸漿管阻力系數
水動力載荷計算包括一階波浪力和二階波浪力,平臺的運動方程如下[14]:
式中:M表示平臺質量的慣性矩陣;Aω表示頻域附加質量矩陣;C表示隨頻率變化的阻尼矩陣;D1、D2分別表示一階、二階阻尼矩陣;K表示靜水剛度矩陣;q(t)表示平臺所受風浪流力,此處考慮DP 推進力,q(t)中包括動力系統推進器的推力;x″、x'、x分別表示平臺的加速度、速度和位移。
波頻內平臺的運動方程為[14]:
式中:x″HF、x'HF、xHF分別表示平臺波頻運動的加速度、速度和位移;qw1(ω)表示一階波浪力。采用卡爾曼濾波器對波浪中的波頻成分進行過濾。
經卡爾曼濾波器濾去波頻成分,時域內船舶運動方程為[14]:
式中:A0表示頻率為0 時平臺的附加質量矩陣;x″LF、x'LF、xLF分別表示平臺的低頻加速度、速度和位移;qw2(ω)表示二階波浪力;qext(t)表示風載荷、流載荷、推進器推力和其他外部力的總和。基于式(3),DP 系統對于平臺低頻運動進行運動定位控制。
波浪譜采用三參數JONSWAP譜來計算波浪載荷,JONSWAP譜表達式:
式中:Hs為有效波高;Tp為譜峰周期;α為無因次風區函數;ωm為譜峰周期對應的頻率;γ為譜峰升高參數,視海浪情況而定,平均值為3.3;σ為峰形系數。風力和海流力基于文獻[15]計算。
輸漿管與平臺底部連接,其下端連接中繼站。輸漿管由Morison公式計算水動力[14]:
式中:F是單位長度輸漿管所受的總水動力矢量;FD是輸漿管與流體因相對速度所產生的拖曳力矢量;FI是輸漿管與流體因相對加速度所產生的慣性力矢量。
考慮輸漿管的構型會發生彎曲和傾斜,拖曳力矢量不僅包括法向力還包括切向摩擦力,拖曳力矢量FD為:
式中:CD為法向阻力系數;CT為切向阻力系數;ρw為海水密度;D為輸漿管直徑;Vn為輸漿管和海水質點法向相對速度矢量;Vt為輸漿管和海水質點切向相對速度矢量。
慣性力矢量FI為:
式中:CM為慣性力系數,取2;V?n為輸漿管和海水質點法向相對加速度矢量。
根據規范《DNVGL-RP-C205》[16],輸漿管阻力系數與表面粗糙度和雷諾數有關,分別計算浮力管段和鋼管段的阻力系數,計算結果如表1所示。

表1 浮力管和鋼管在不同流速下的CDTab.1 Normal resistance coefficient of buoyancy tubes and steel tubes at various flow rates
2 采礦平臺建模及幅頻響應計算
2.1 計算模型
采礦平臺和輸漿管的技術參數如表2和表3所示。
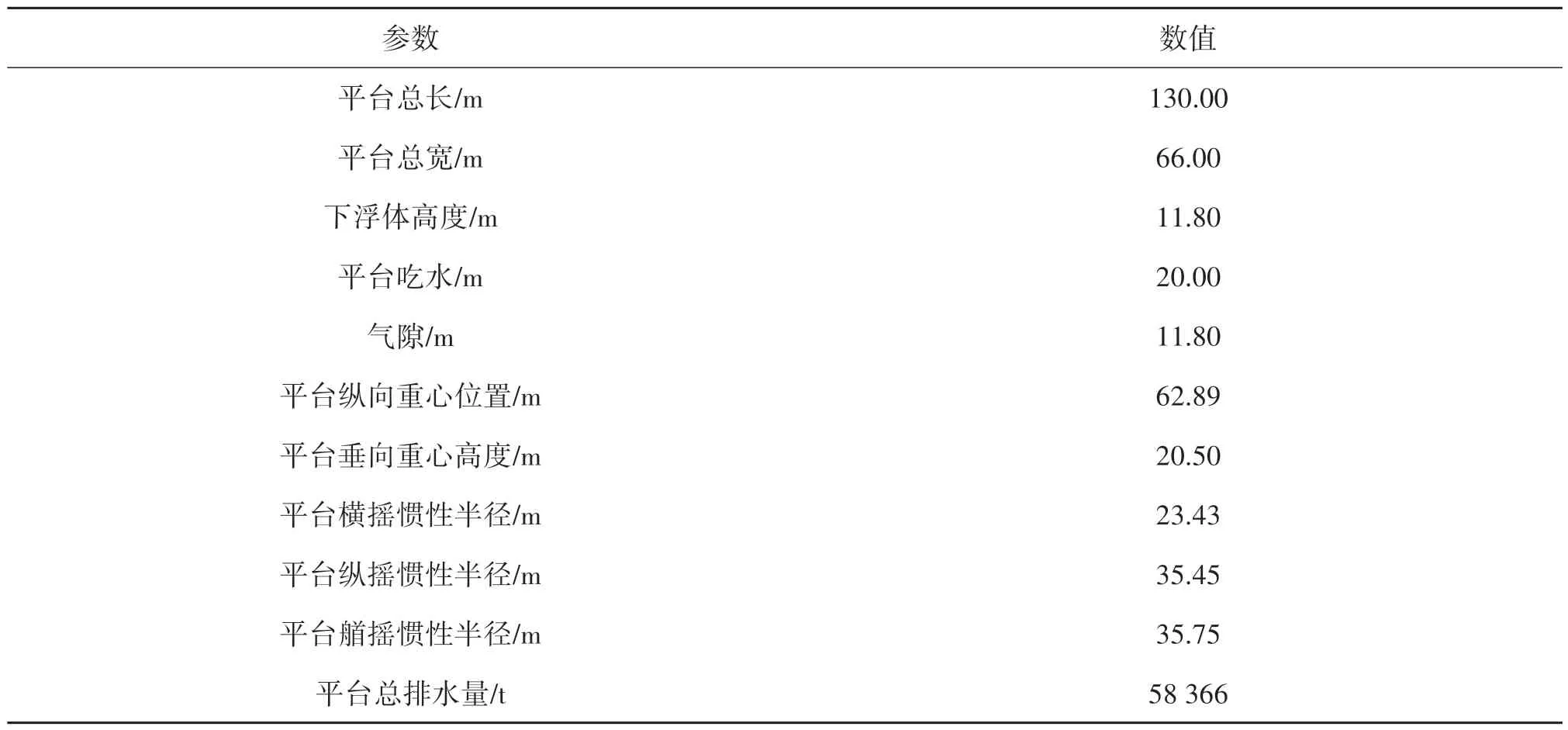
表2 采礦平臺主要技術參數Tab.2 Main technical parameters of mining platforms
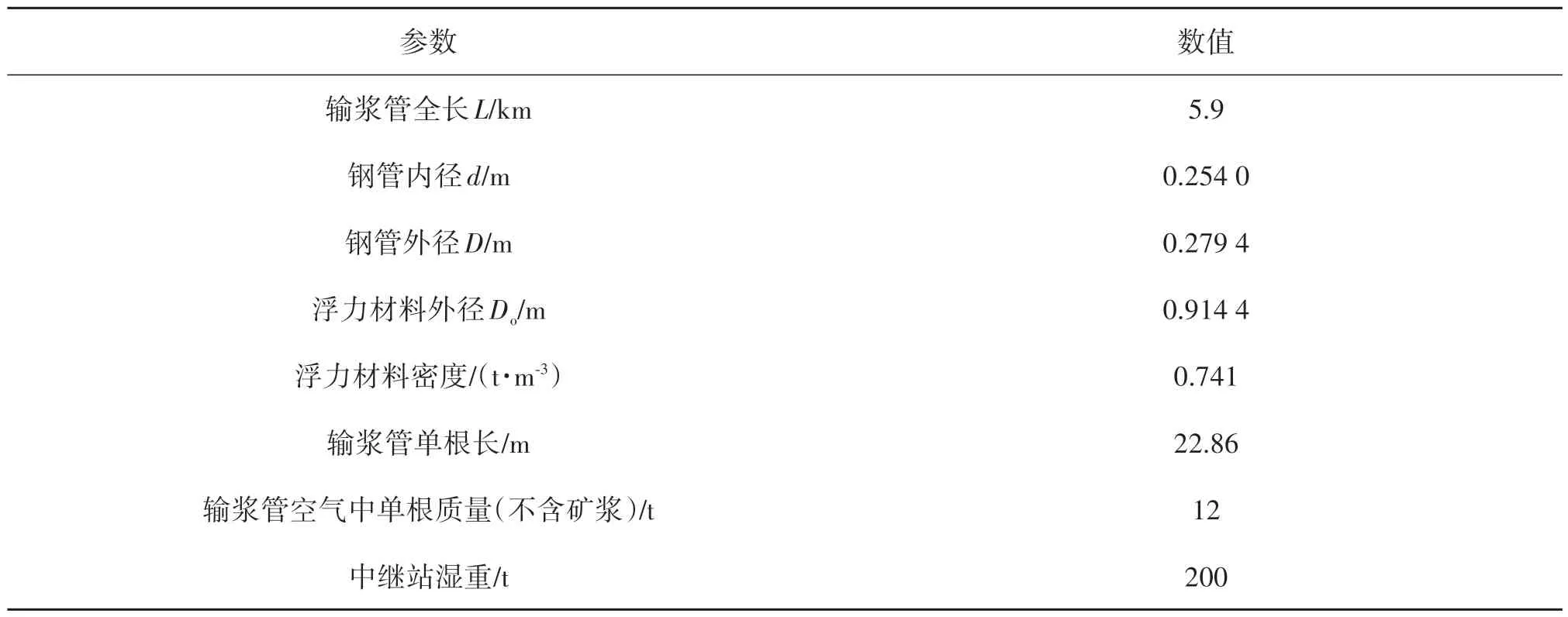
表3 輸漿管技術參數Tab.3 Technical parameters of slurry pipes
輸漿管浮力材料布置為:浮力管長2.0 km,自水面開始向下布置,如圖1所示。
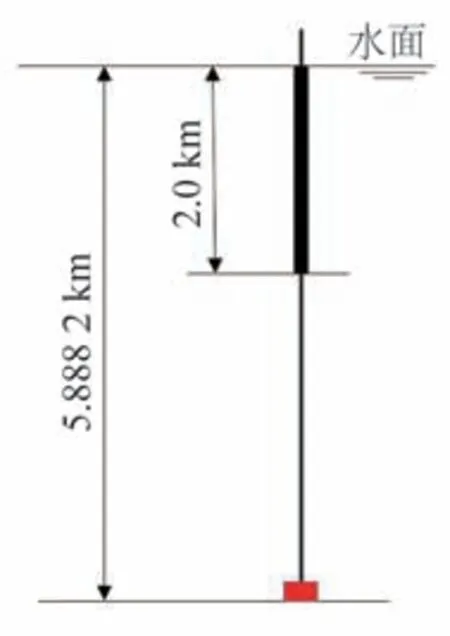
圖1 浮力材料布置方案Fig.1 The layout plan of buoyancy materials
輸漿管上端水面以上部分,高11.8 m,不設浮力管。輸漿管與平臺底部鉸接,中繼站下端與軟管連接,如圖2所示。軟管對于中繼站運動有一定位移限制作用,但不限制中繼站的轉動,所以可取為3個線彈簧。由于輸漿管頂端與平臺鉸接,為了計算輸漿管的軸力彎矩等,需要排除軟管的剛體位移,所以在中繼站的下端施加3個剛度系數很小的彈簧,以便排除輸漿管及中繼站的剛體位移。
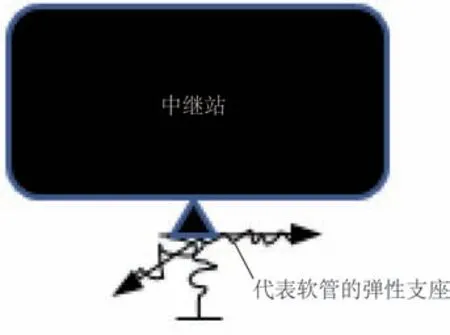
圖2 中繼站下端的邊界條件Fig.2 Boundary conditions at the lower end of the relay station
經過試算,取3個線彈簧的剛度系數為鋼管剛度系數的1/1 000時,便可以有效排除中繼站的剛體位移,保證計算的收斂性。3個彈簧剛度系數取鋼管剛度系數的1/1 000,即:
式中:E為鋼管彈性模量;A為鋼管的截面積。
輸漿管水面以下長度為5.888 2 km,水面以上連接到平臺底部的輸漿管長為11.8 m,因此,圖3(b)中輸漿管的長度為5.888 2+0.011 8=5.9 km。采礦平臺水下部分采用網格離散計算水動力,輸漿管采用梁單元離散,單元長度10 m。平臺和輸漿管幾何模型如圖3所示。

圖3 計算模型Fig.3 Computational models
采礦平臺坐標系原點位于平臺的重心,坐標系和計算模型如圖4所示,平臺水下網格離散后網格數量為7 665個,節點數量為7 703個,對該網格劃分進行了網格無關性驗證。
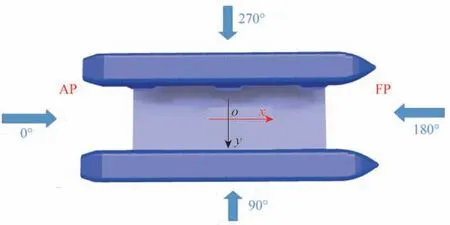
圖4 深海采礦平臺俯視坐標系示意Fig.4 The schematic diagram of the top coordinate system of a deep-sea mining platform
深海采礦平臺的幾何模型和網格模型如圖5所示。

圖5 平臺幾何模型與網格模型Fig.5 The platform geometric model and mesh model
2.2 幅頻響應RAOs計算
取浪向角0°~180°,間隔30°計算幅頻響應RAO(response amplitude operator)。深海采礦平臺部分幅頻響應曲線如圖6所示。

圖6 深海采礦平臺RAOFig.6 Deep-sea mining platform RAO
由圖6 可知:平臺縱蕩和縱搖運動在波浪入射角為0°時幅值最大,縱蕩最大幅值為0.98 m,縱搖最大幅值為0.58°;垂蕩運動在波浪入射角為90°時幅值最大,垂蕩最大幅值為1.5 m;艏搖運動在波浪入射角為150°時幅值最大,最大幅值為0.27°。由水動力計算得到深海采礦平臺縱搖和垂蕩的固有周期分別為25.7 s 和21.2 s。
3 轉場過程時域動力響應計算
針對平臺轉場工況,取浪向0°計算平臺—輸漿管—中繼站一體化耦合動力響應。
3.1 轉場工況海況參數
轉場工況時航速為1.0 m/s,將航速轉化為流速計算動力響應。轉場工況的海況參數為:有效波高6.0 m;波周期11.2 s;風速17.1 m/s。
海面自然流速為1.0 m/s,沿0°方向,平臺航向沿0°方向,假定平臺不運動,通過流速增大模擬平臺運動,則航速與自然流速疊加,海面流速為2.0 m/s。
轉場工況流速:0~200 m 水深,流場為從2 m/s 減小至1 m/s 的剪切流;0.2~6.0 km 水深,流場為1.0 m/s 的均勻流。計算取風、浪、流同向。
3.2 動力定位參數整定
3.2.1 基于平臺位移和推進器推力的參數整定
因為采礦平臺是通過DP3 系統(dynamic position,簡稱DP3)控制整個采礦系統的位置,通過感知和算法,DP3調整推進器的轉速和方向以控制推力,保持平臺位于海上的適當位置。
深海采礦平臺動力定位系統安裝8 個全回轉推進器,單個推進器最大輸出功率4.2 MW,最大推力735 kN,推進器對稱布置在左右兩個下浮體上,推進器布置如圖7所示。
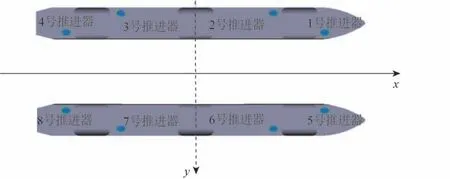
圖7 深海采礦平臺推進器布置Fig.7 The thruster layout of a deep sea mining platform
通過嵌入在SESAM 程序中的 SIMA 程序模塊,進行參數整定[15],SIMA 模塊中應用卡爾曼(Kalman)濾波及LQ(linear quadratic method)算法,進行推力分配和優化。打開SIMA 模塊中的Control System,設定控制增益和濾波增益,輸入風浪流參數及水深,進行參數整定。整定過程固有周期取值區間為100~190 s,以10 s為間隔;截斷周期取值區間為60~100 s,以5 s為間隔。最終得到90種參數組合進行參數整定。
以轉場工況、浪向0°為條件,輸入不同的參數組合和風浪流參數進行時域計算,得到不同參數組合平臺水平位移和推進器推力如圖8和9所示。
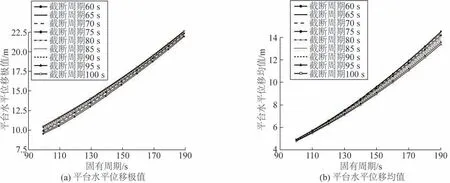
圖8 平臺水平位移與參數整定的關系Fig.8 Relationship between horizontal displacement of platforms and parameter setting
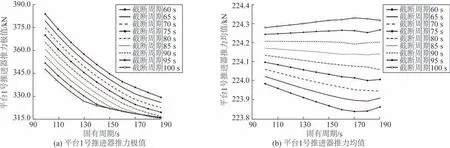
圖9 平臺推進器推力與參數整定的關系Fig.9 Relationship between thrust and parameter settings of platform thrusters
由圖8~9可知:隨固有周期的增大,平臺水平位移均值和極值增大,推進器推力極值減小;隨截斷周期的增大,平臺水平位移極值增大、均值減小,推進器推力極值減小、均值增大。所以,取轉場工況0°浪向參數整定結果見表4。

表4 轉場工況浪向0°參數整定結果Tab.4 Parameter setting outcomes of wave direction 0° under transition condition 單位:s
3.2.2 中繼站位移和輸漿管軸力與參數整定的關系
計算中繼站位移和輸漿管軸力與參數關系結果表明,參數整定對于輸漿管單元軸力和中繼站位移影響相對較小。此處略去該計算過程。故選取表4參數整定結果計算時域響應。
3.3 轉場工況一體化耦合時域響應結果
按照3.2節參數整定結果,設定推進器參數,考慮轉場工況浪向0°,計算圖5所示模型的時域運動響應。
3.3.1 深海采礦平臺時域響應結果
轉場工況0°浪向采礦平臺主要運動是縱蕩、垂蕩和縱搖時域響應,計算結果如圖10所示。
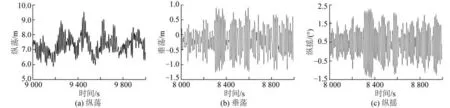
圖10 平臺運動時域響應結果Fig.10 Time domain response outcomes of platform motions
轉場工況0°浪向平臺六自由度運動統計如表5所示。

表5 轉場工況浪向0°平臺運動響應統計Tab.5 Statistics of wave motion response to the 0° platform under transition conditions
由表5 可知:轉場工況浪向0°平臺主要發生縱蕩、垂蕩和縱搖運動,縱蕩極值為9.13 m,垂蕩極值為1.44 m,縱搖極值為3.52°。
3.3.2 推進器推力時域響應結果
轉場工況浪向0°,1號、4號、5號和8號推進器推力時域響應曲線如圖11所示。

圖11 推進器推力時域響應結果Fig.11 Time domain response outcome of thruster thrusts
轉場工況浪向0°各個推進器推力統計如表6所示。
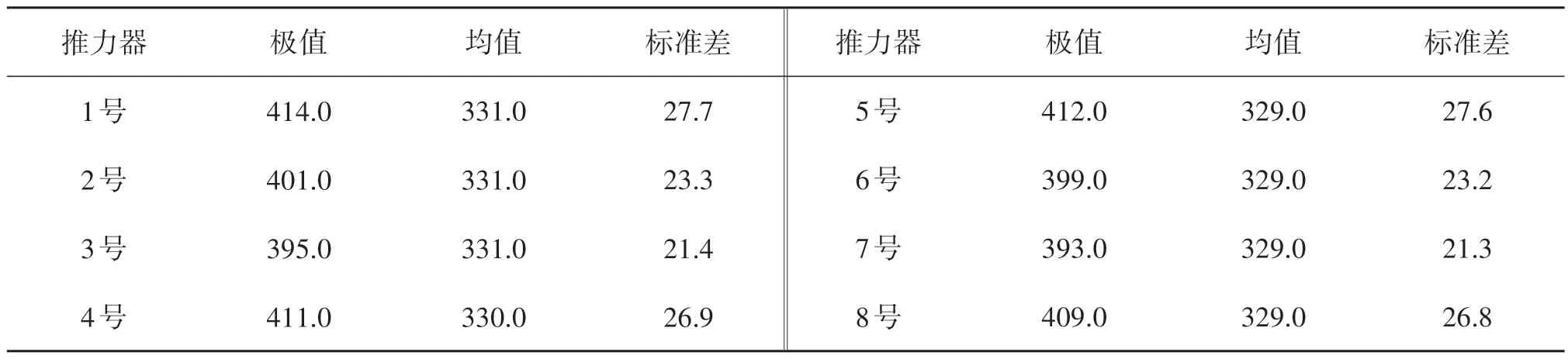
表6 轉場工況浪向0°推進器推力統計Tab.6 Statistics of wave motion response to 0° platform under transition conditions 單位:kN
由表6 可知:各個推進器推力極值和均值基本一致,單個推進器可以發出的有效推力為735.0 kN,遠大于控制平臺運動需要的推力,推進器推力可以充分滿足控制平臺運動的要求。
3.3.3 輸漿管軸力時域響應結果
輸漿管軸力主要受鋼管濕重和浮力材料的影響,浮力材料的布置導致輸漿管的軸力自浮力材料布置位置的最下端開始減小。轉場工況0°浪向,輸漿管頂端單元、底端單元和浮力材料布置底端單元(對應389 單元)的軸力時域響應曲線如圖12所示。
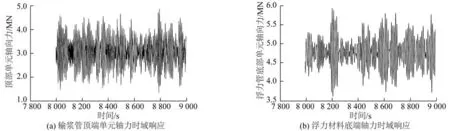
圖12 輸漿管轉場工況軸力時域響應Fig.12 Time-domain responses of axial force of slurry conveying pipes under transition condition
轉場工況浪向0°,輸漿管頂部單元、底部單元和浮力材料底部單元的軸力統計如表7所示。

表7 轉場工況浪向0°型單元軸力統計Tab.7 Statistics of axial force of wave direction 0° type element under the transition conditions 單位: MN
統計所有單元的軸力均值和極值,軸力的均值和極值隨單元編號的變化如圖13所示。由圖13可知:輸漿管軸力的均值和極值都自下而上先增大后減小,且在單元編號389取得最大值,此處為浮力管最下端的單元,極值為5.94 MN,該極值拉力主要由鋼管重量和浮力管的重量差引起。

圖13 輸漿管單元軸力統計Fig.13 Axial force statistics of the slurry conveying pipe unit
3.3.4 中繼站運動響應及輸漿管構型
轉場工況下,中繼站運動響應主要是縱蕩和垂蕩,其橫蕩很小,浪向0°下中繼站位移統計如表8所示。

表8 轉場工況浪向0°中繼站位移統計Tab.8 Statistics of wave direction 0° relay station displacement under the transition conditions 單位:m
由圖14和表8可知:轉場工況、0°浪向中繼站主要發生縱蕩和垂蕩方向上的運動,中繼站縱蕩運動極值為200.29 m,垂蕩運動極值為11.87 m。對于0°浪向,以輸漿管的縱蕩和垂蕩為坐標點,畫出輸漿管的位移構型圖15。
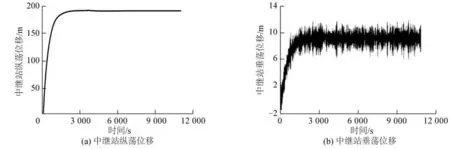
圖14 中繼站轉場工況位移響應Fig.14 Displacement response of relay stations under the transfer condition
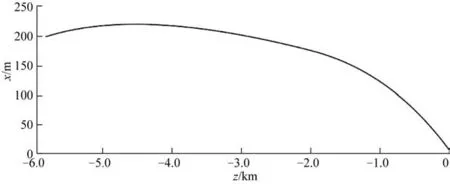
圖15 轉場工況浪向0°輸漿管構型Fig.15 Configuration of slurry conveying pipe at 0 ° wave direction under transition conditions
4 結 語
考慮動力定位系統,建立采礦平臺和水下系統一體化耦合動力響應計算模型,計算分析轉場工況采礦系統的耦合動力響應,得到如下主要結論:
1)建立的平臺—輸漿管—中繼站一體化耦合動力分析模型,可以全面研究采礦平臺及水下系統的動力響應特性,對深海采礦設施的動力分析具有指導意義。
2)中繼站縱蕩運動極值為200.29 m,其他方向運動相對很小,深海采礦平臺設計過程應該設法降低中繼站運動;此外,中繼站的運動對輸漿管強度影響較大。
3)輸漿管最大軸力出現在浮力材料的底端,為5.94 MN,位于水下2.0 km。后續研究應改變浮力材料的位置,使軸力最大值出現在輸漿管的頂端,并且適當減小軸力,提高輸漿管的疲勞強度。
